TRANS-AM: Transfer Learning by Aggregating Dynamics Models for Soft Robotic Assembly (ICRA'21)
Kazutoshi Tanaka, Ryo Yonetani, Masashi Hamaya, Robert Lee, Felix von Drigalski, and Yoshihisa Ijiri, “TRANS-AM: Transfer Learning by Aggregating Dynamics Models for Soft Robotic Assembly”, ICRA 2021
Transfer Learning by Aggregating Dynamics Models for Soft Robotic Assembly (ICRA’21) Kazutoshi Tanaka, Ryo Yonetani, Masashi Hamaya, Robert Lee, Felix von Drigalski, and Yoshihisa Ijiri (OMRON SINIC X) International Conference on Robotics and Automation (ICRA 2021) June 1, 2021
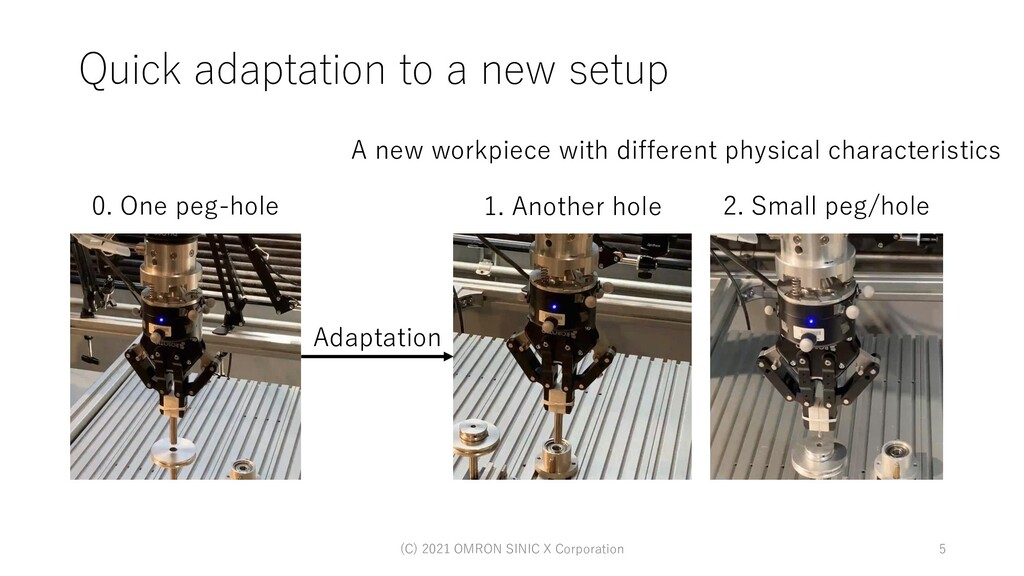
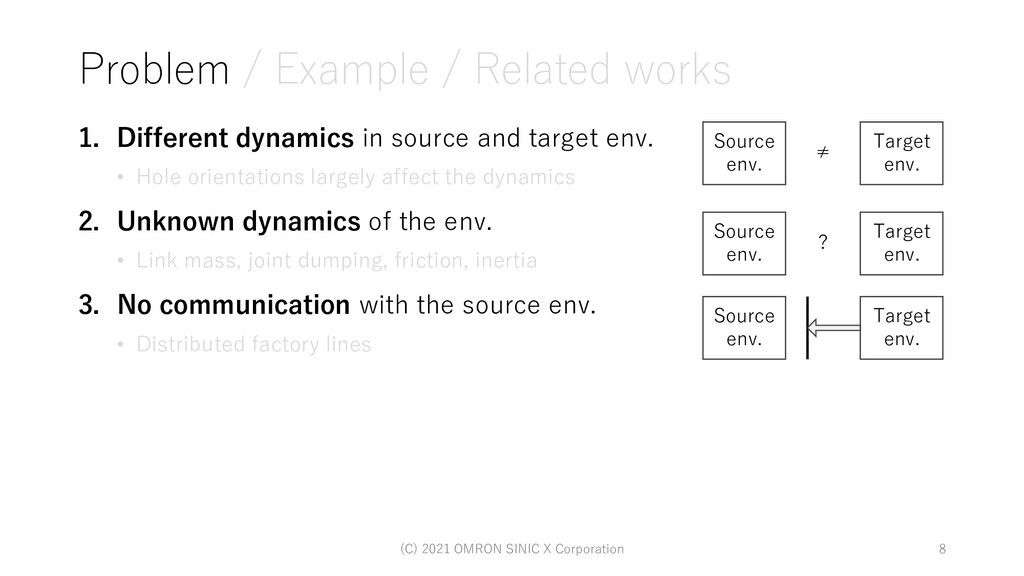
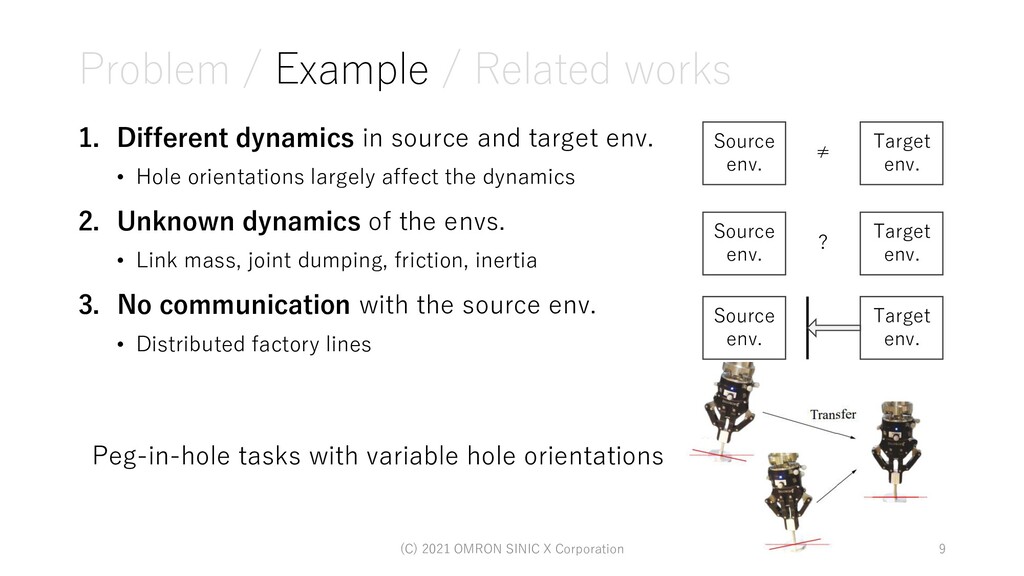
6 A new workpiece with different physical characteristics 0. One peg-hole 1. Another hole 2. Small peg/hole Source env. Target env. env. = environment Adaptation Learning
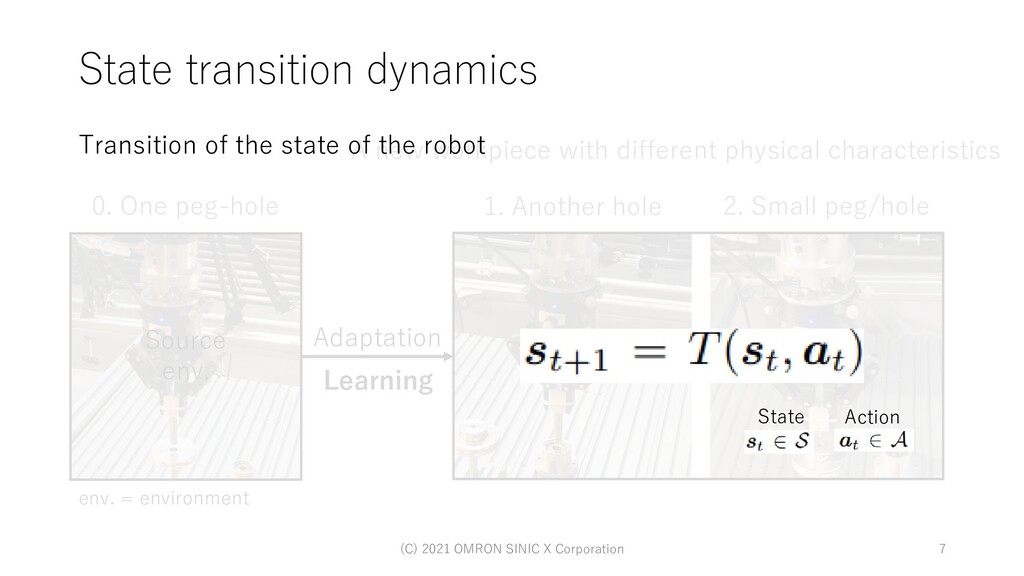
A new workpiece with different physical characteristics 0. One peg-hole 1. Another hole 2. Small peg/hole Source env. Target env. env. = environment Adaptation Learning Action State Transition of the state of the robot
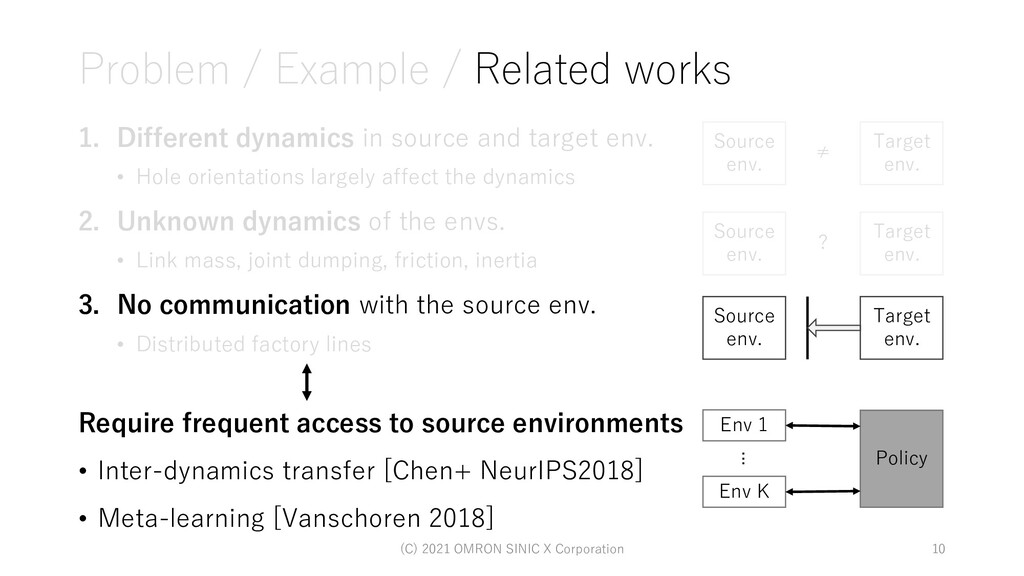
source envs. • Model-free RL • Many interactions at target envs. • Long delays until deployment • Damage of the robots and workpieces • Model-based RL (ours, TRANS-AM) 11 (C) 2021 OMRON SINIC X Corporation [Barekatain+ IJCAI2020] Policy Env 1 Env K ...
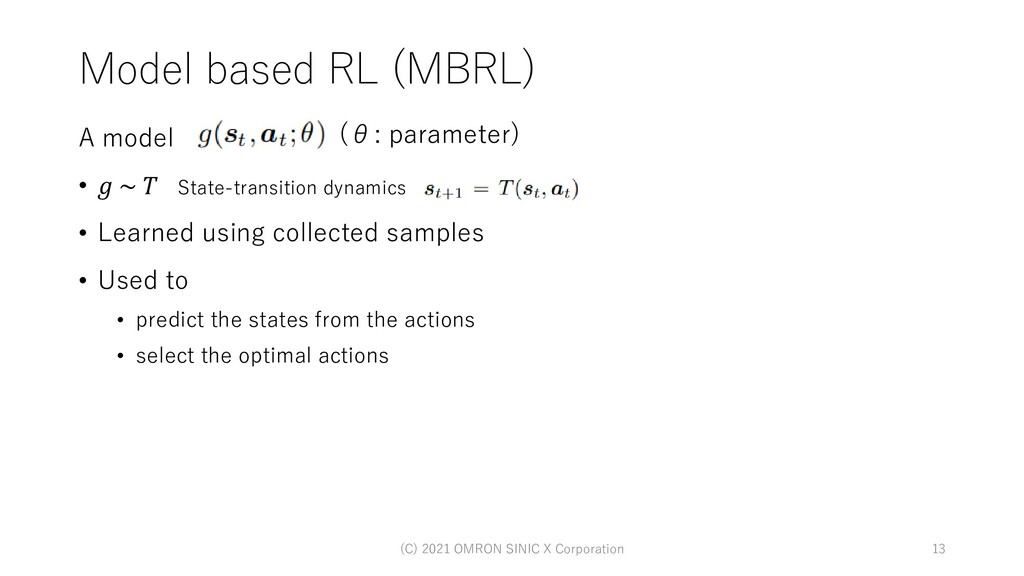
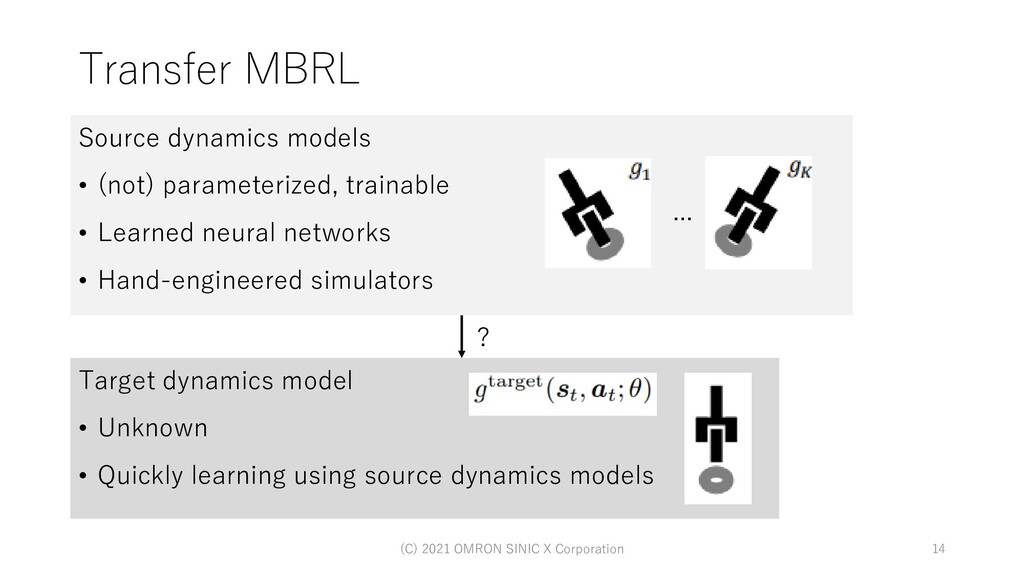
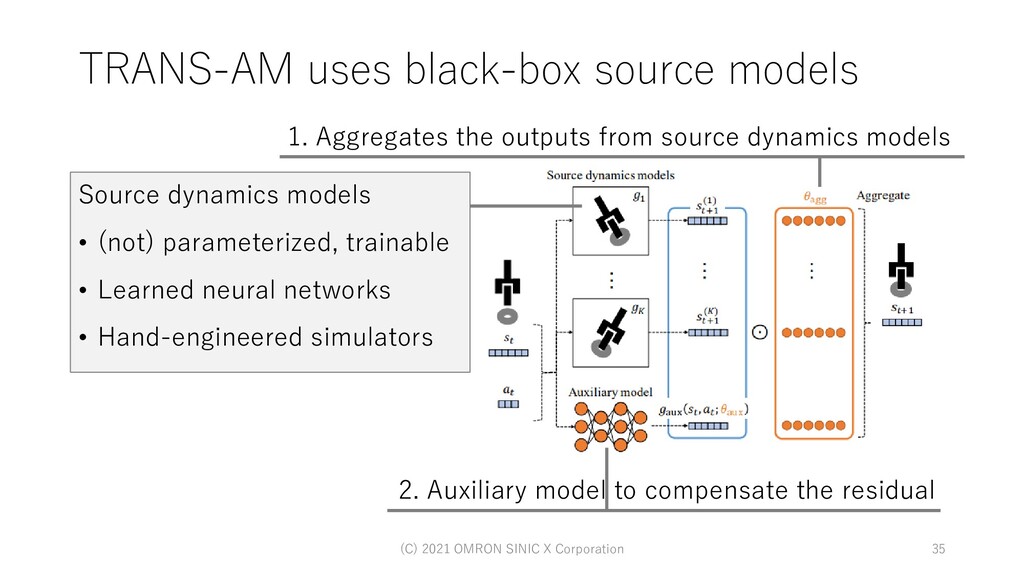
• Learned using collected samples • Used to • predict the states from the actions • select the optimal actions (θ: parameter) 13 (C) 2021 OMRON SINIC X Corporation State-transition dynamics
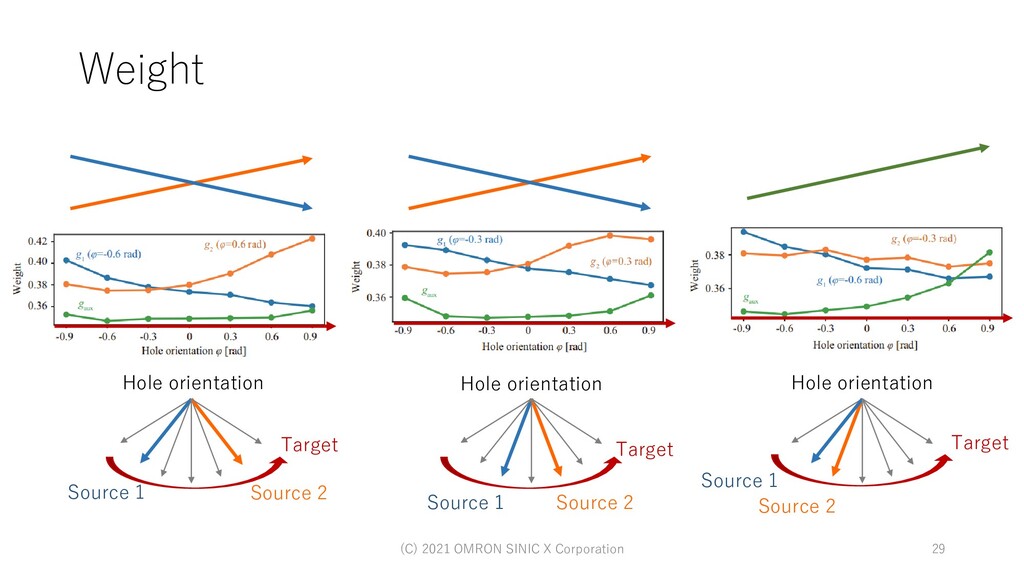
of the wrist and the peg • Action: the velocity of the wrist • Return: the distance to goal position 17 (C) 2021 OMRON SINIC X Corporation Wrist Peg Spring Hole orientation Gripper
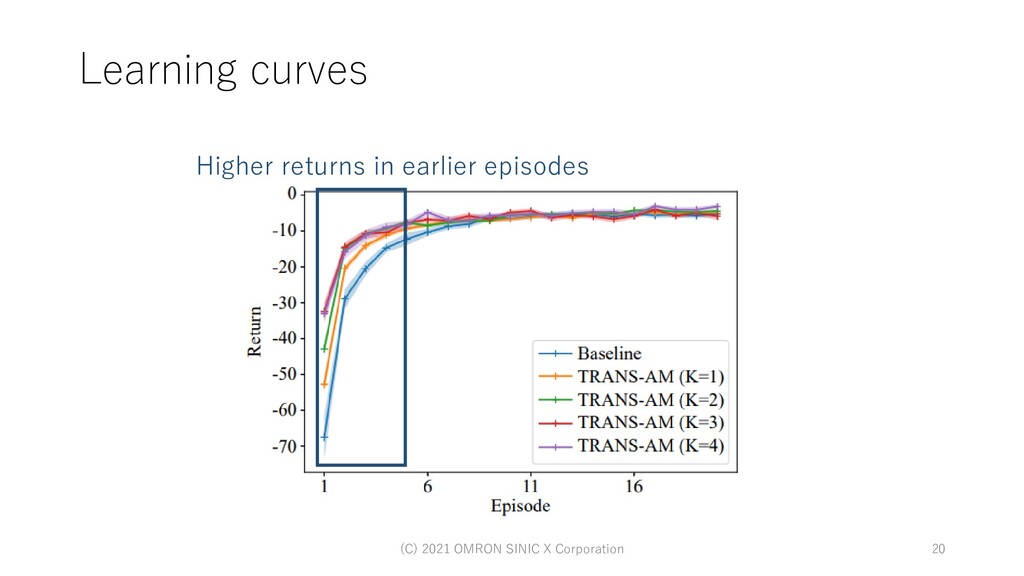
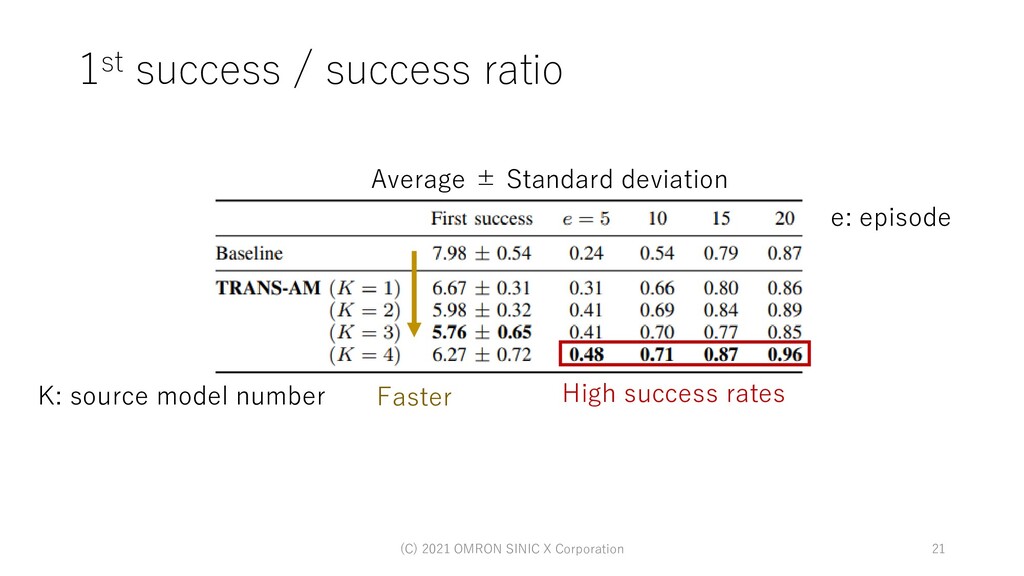
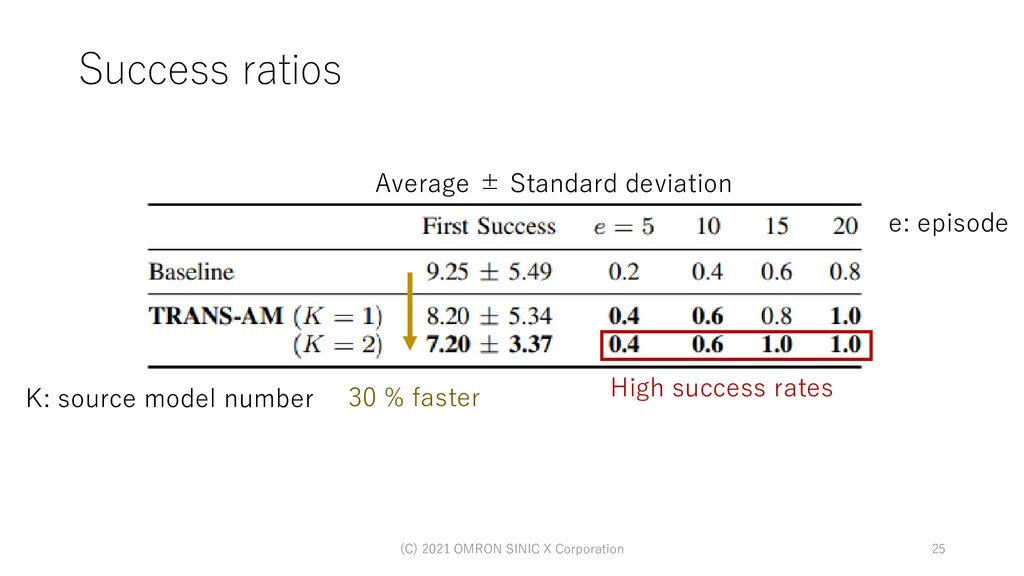
curve 2. 1st success episode • average ± standard deviation 3. Success ratio • session with success before {5, 10, 15, 20 episode}/ all session • The number of source dynamics (K) is changed • Baseline: learning from scratch (C) 2021 OMRON SINIC X Corporation 18
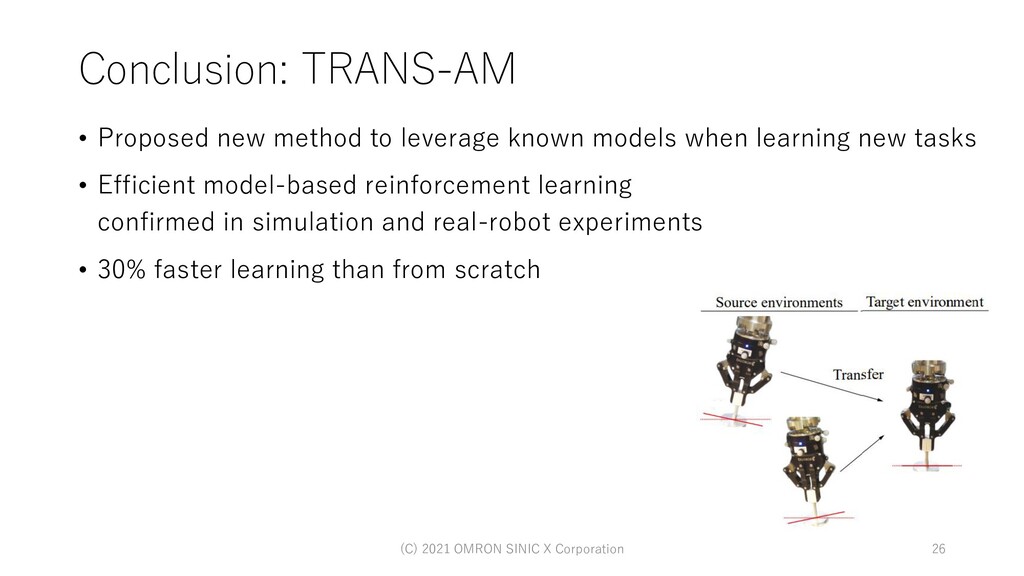
when learning new tasks • Efficient model-based reinforcement learning confirmed in simulation and real-robot experiments • 30% faster learning than from scratch 26 (C) 2021 OMRON SINIC X Corporation
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}