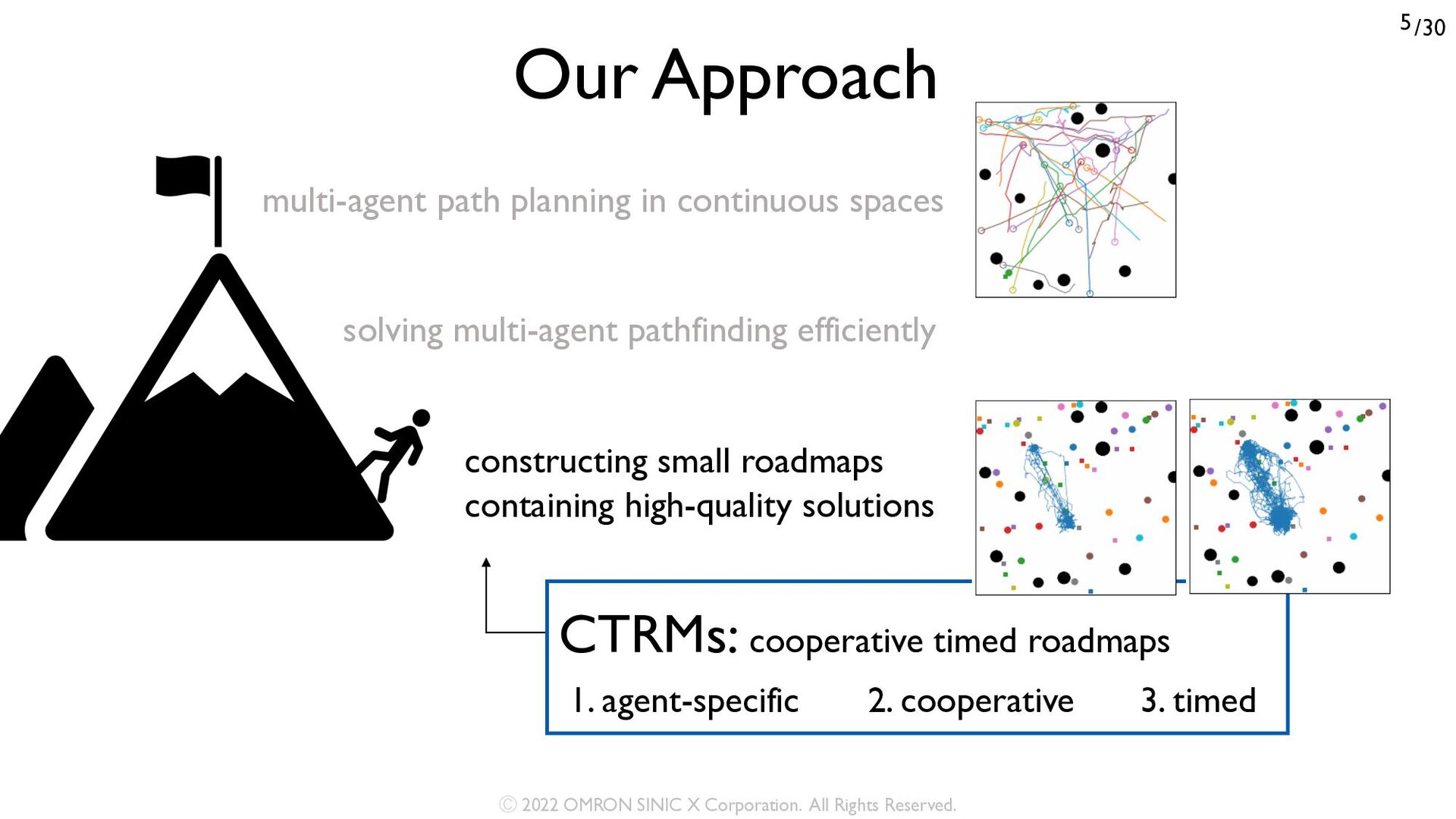
CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces (AAMAS'22)
Keisuke Okumura**, Ryo Yonetani*, Mai Nishimura*, Asako Kanezaki**
* OMRON SINIC X | ** Tokyo Institute of Technology
Presented at International Conference on Autonomous Agents and Multiagent Systems (AAMAS) 2022
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
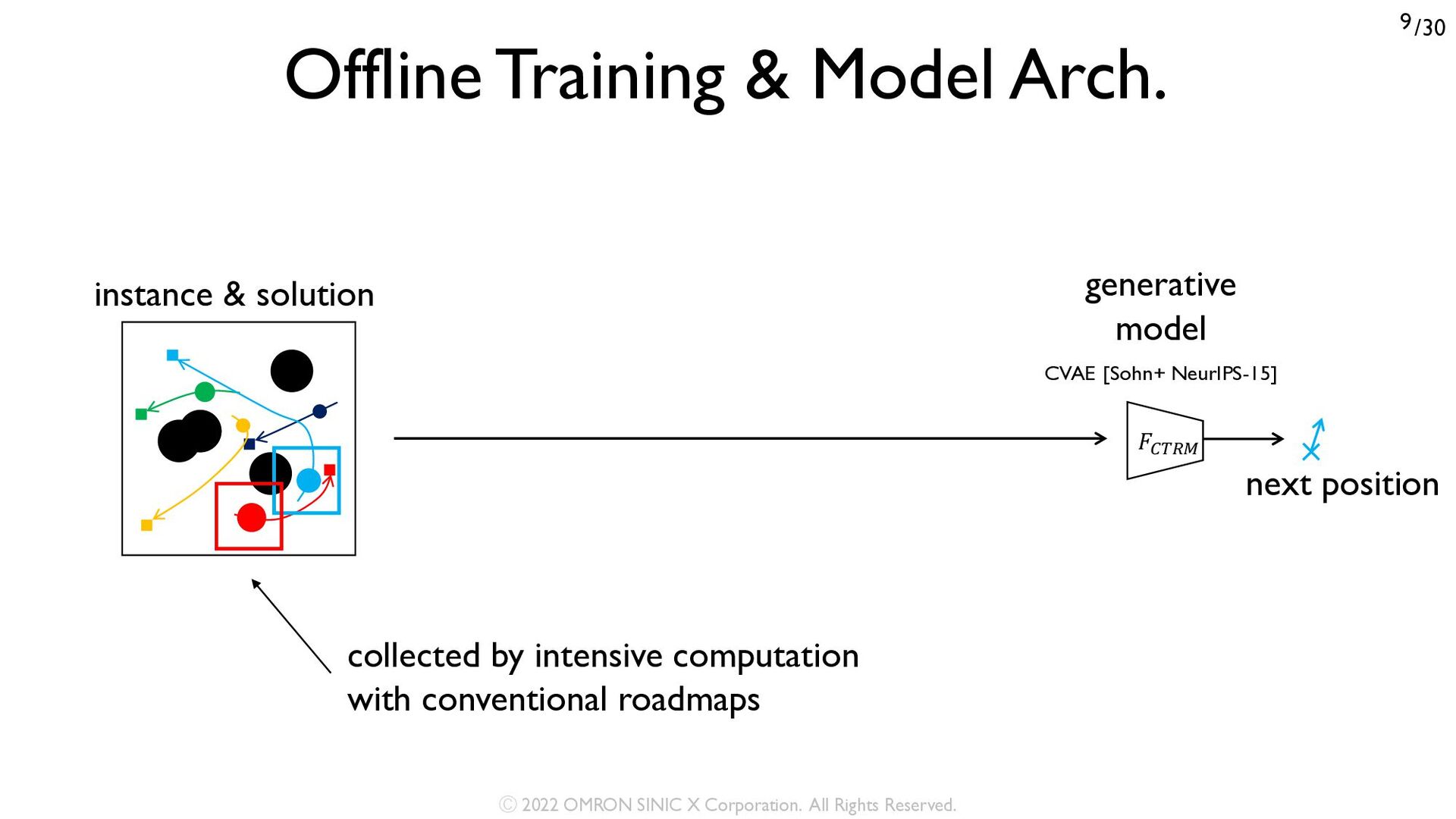
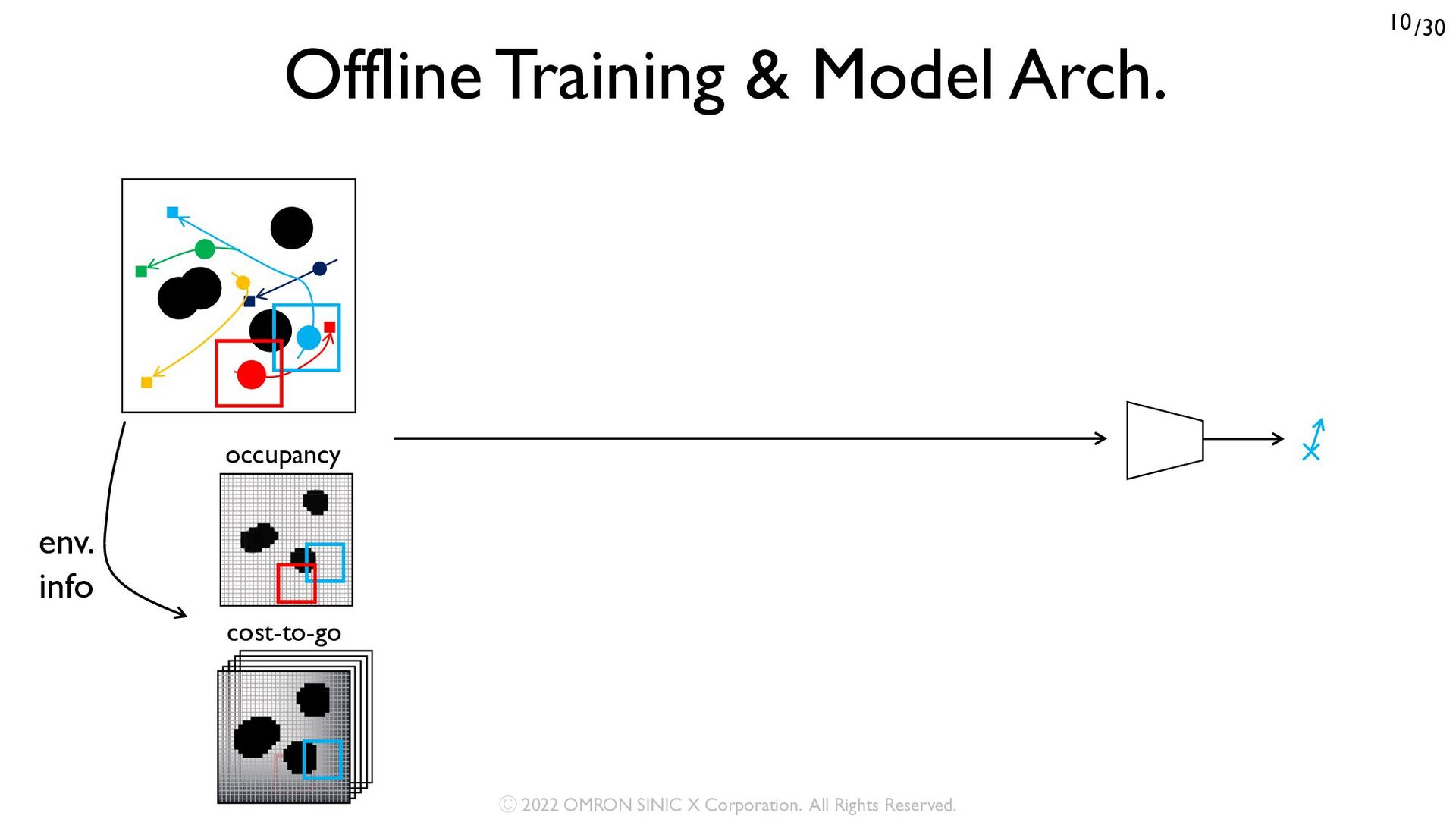
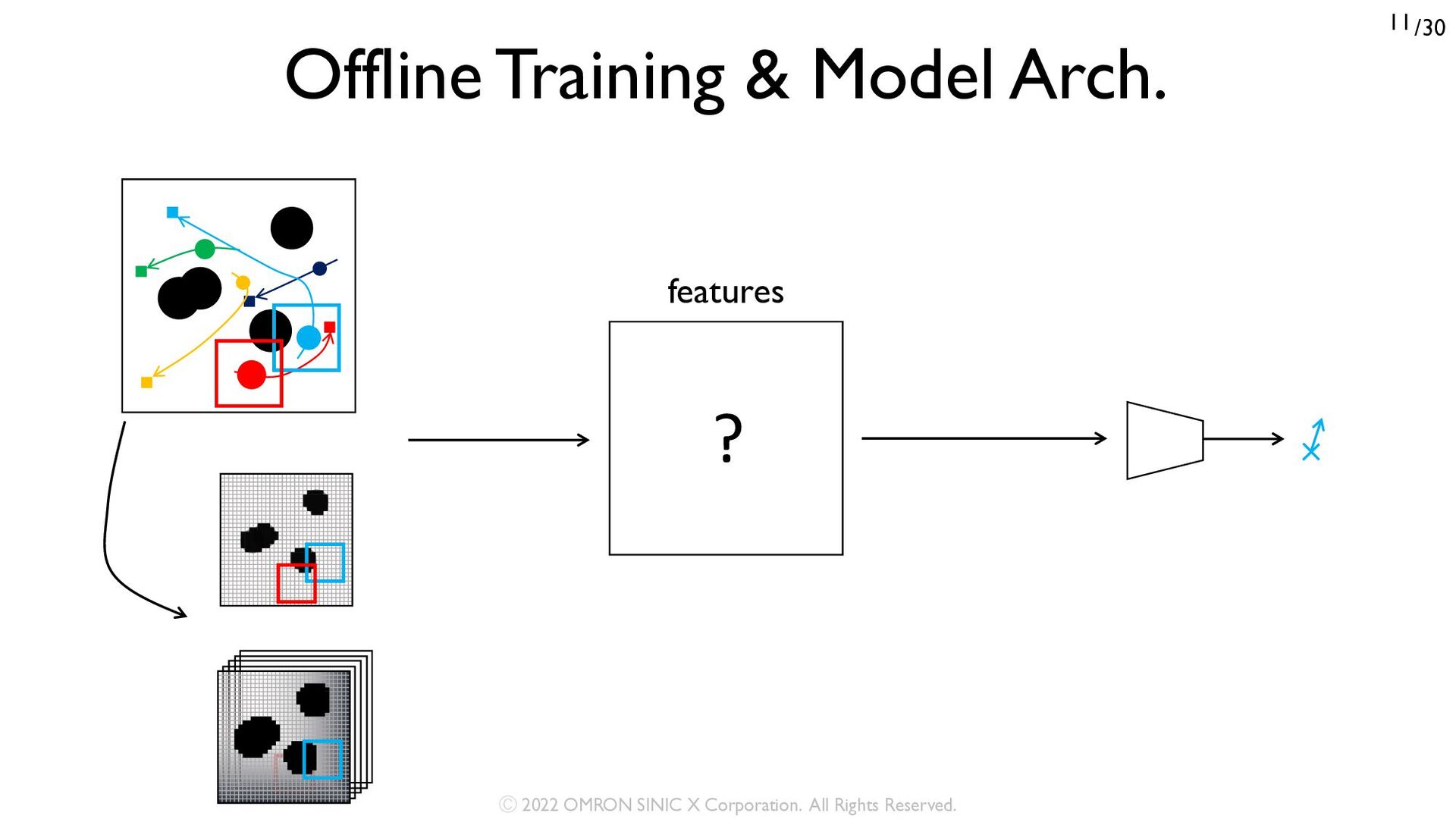
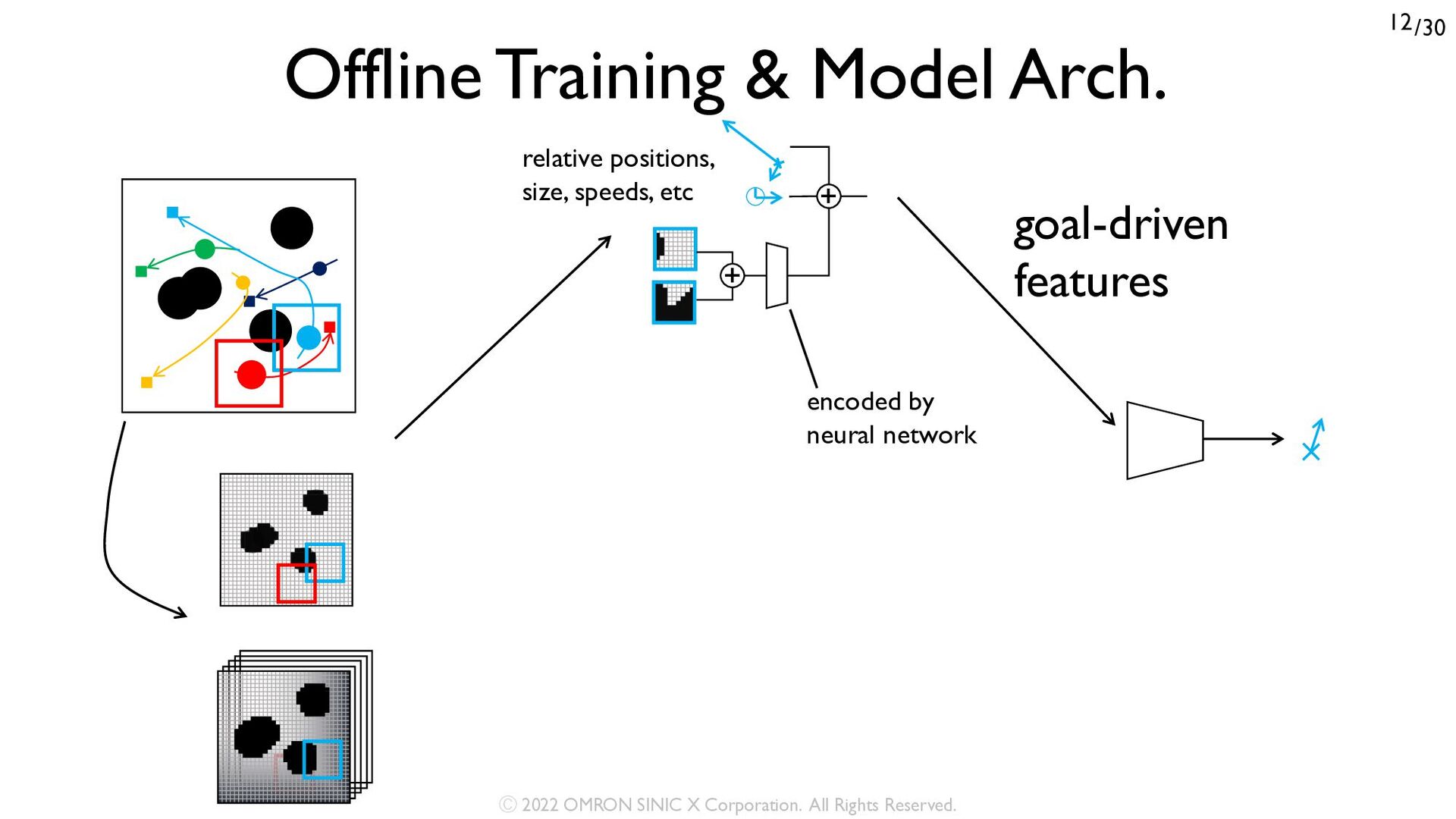
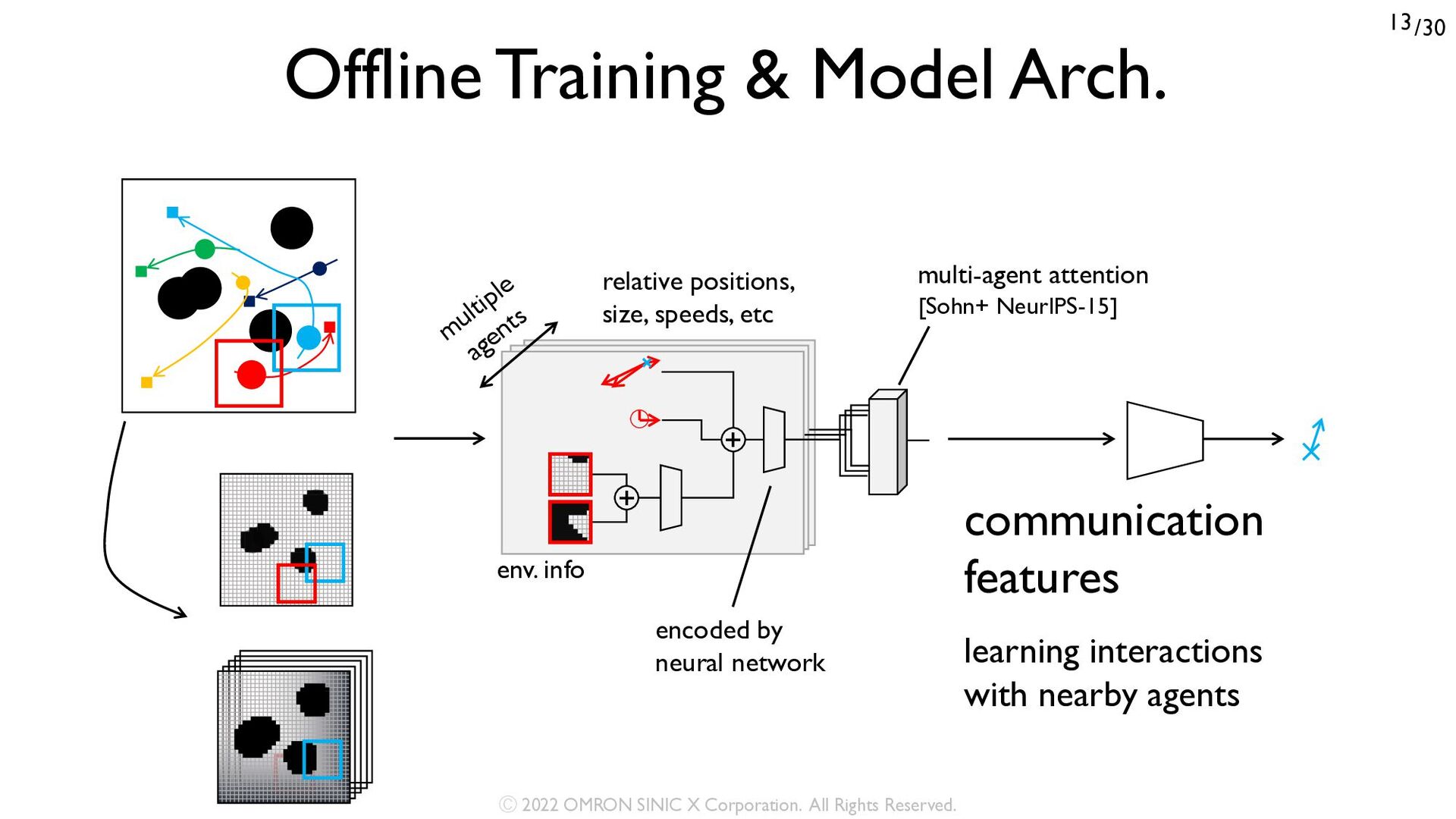
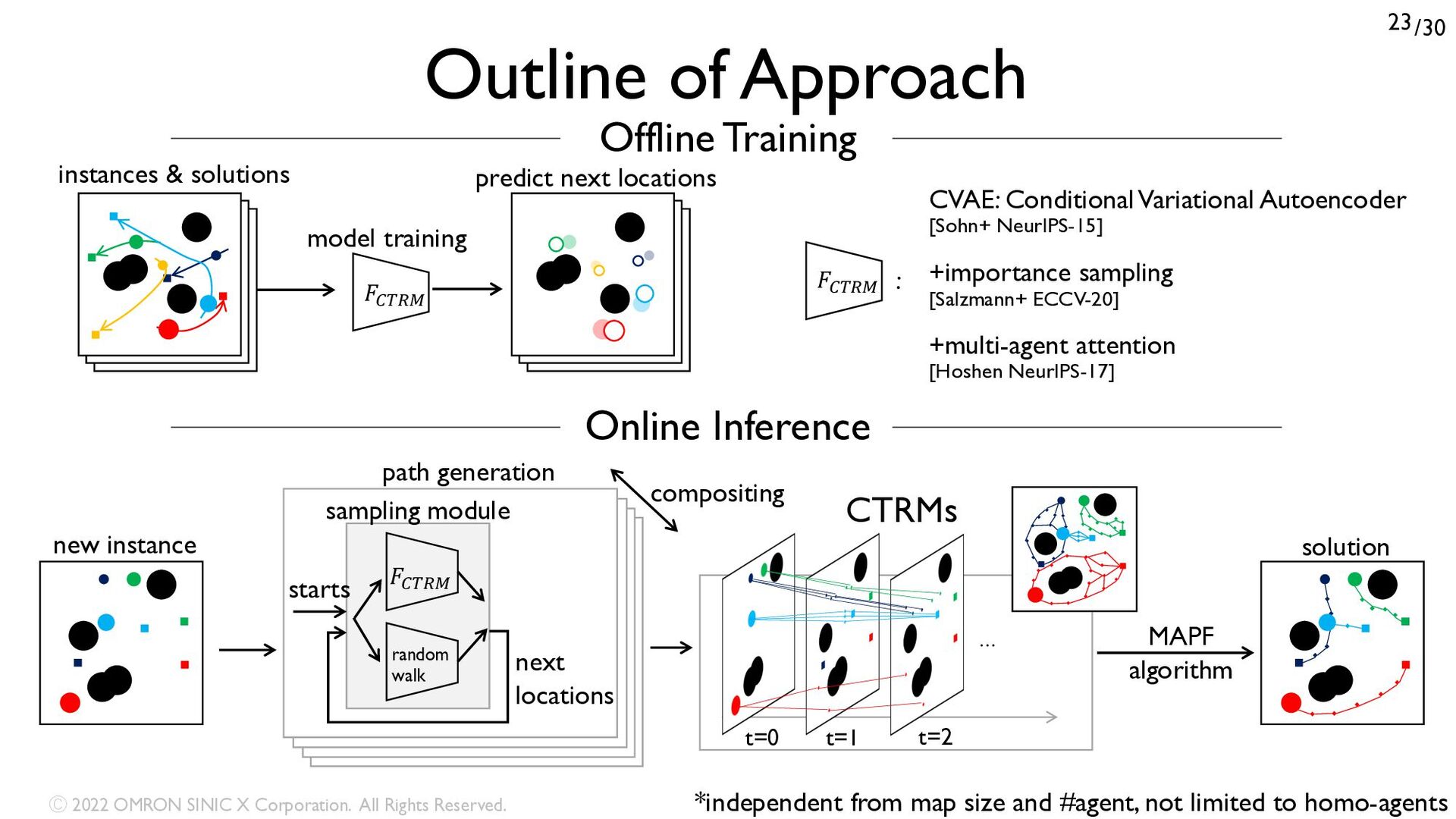
![/30 14 Offline Training & Model Arch. go right [0,0,1]](https://files.speakerdeck.com/presentations/20ccaf0bd5d74f5bbc680fa47916d23f/slide_14.jpg){kind=link}
![/30 15 + + + + go right [0,0,1] 𝐹!"#$](https://files.speakerdeck.com/presentations/20ccaf0bd5d74f5bbc680fa47916d23f/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![/30 25 Roadmap Visualization SPARS [Dobson & Bekris, IJRR-14] (random)](https://files.speakerdeck.com/presentations/20ccaf0bd5d74f5bbc680fa47916d23f/slide_25.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}