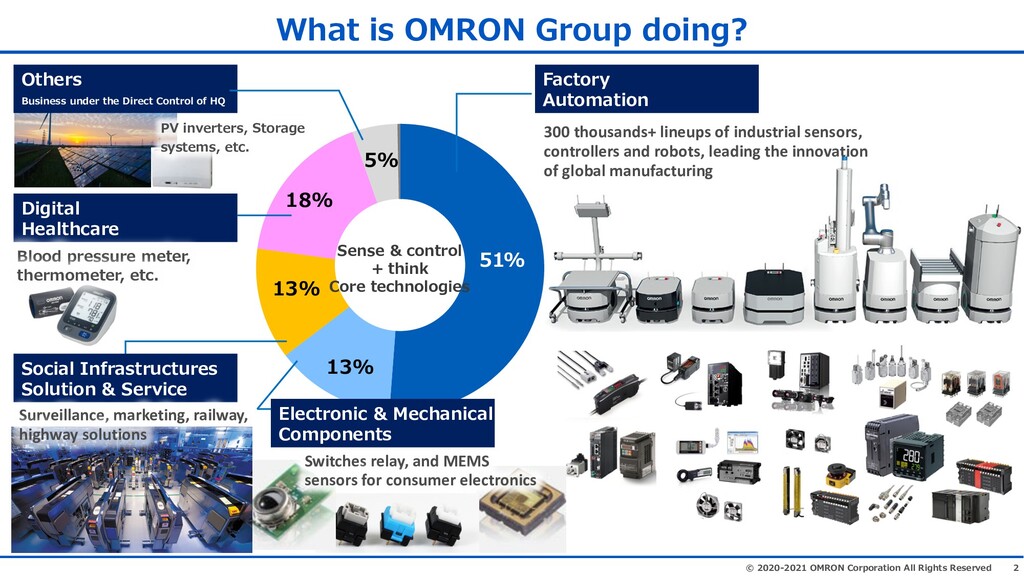
OMRON Group doing? Switches relay, and MEMS sensors for consumer electronics 300 thousands+ lineups of industrial sensors, controllers and robots, leading the innovation of global manufacturing 5% 18% 13% 13% 51% Sense & control + think Core technologies Others Business under the Direct Control of HQ Digital Healthcare Social Infrastructures Solution & Service Electronic & Mechanical Components Factory Automation Surveillance, marketing, railway, highway solutions Blood pressure meter, thermometer, etc. PV inverters, Storage systems, etc.
industrial robotics https://morunuma.keymary.net/robotfactory/ https://www.khi.co.jp/rd/magazine/163/nj163tr01.html Product mix Tailored production Mass production High-mix low-volume production Quantity Automated Human
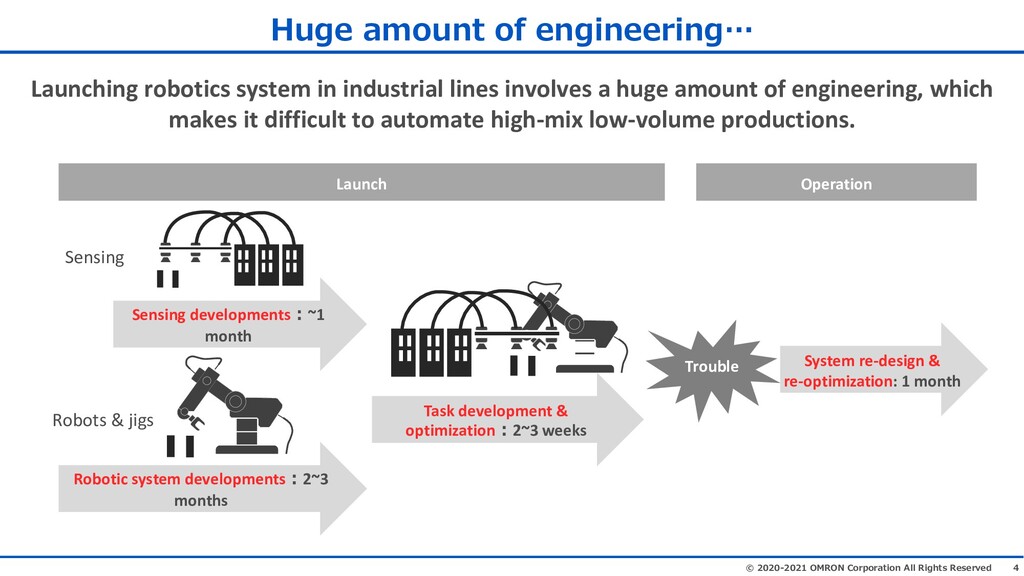
system in industrial lines involves a huge amount of engineering, which makes it difficult to automate high-mix low-volume productions. Huge amount of engineering… Sensing developments؟~1 month Robotic system developments؟2~3 months Sensing Robots & jigs Task development & optimization؟2~3 weeks System re-design & re-optimization: 1 month Trouble Launch Operation
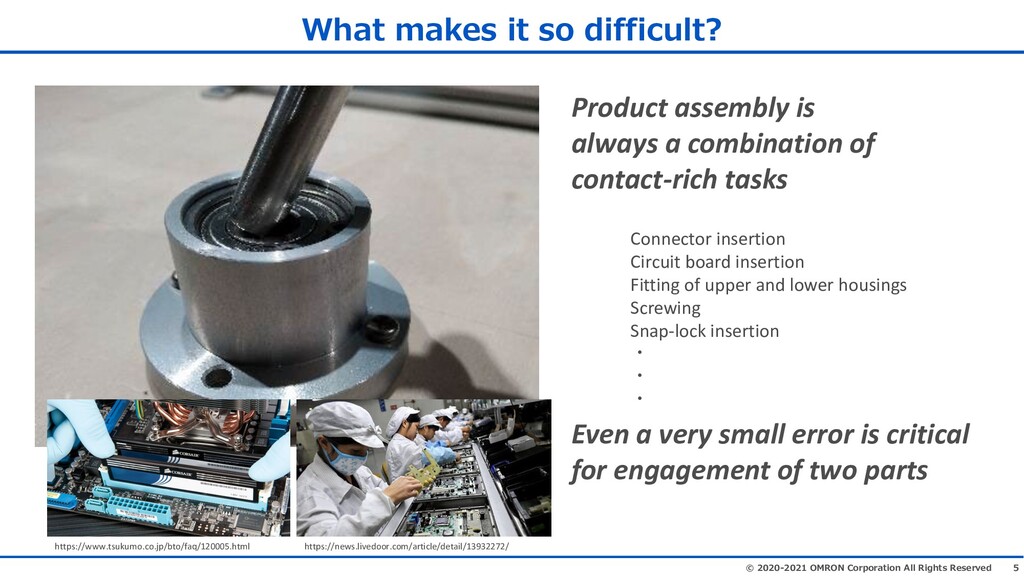
it so difficult? Product assembly is always a combination of contact-rich tasks Connector insertion Circuit board insertion Fitting of upper and lower housings Screwing Snap-lock insertion ؞ ؞ ؞ Even a very small error is critical for engagement of two parts https://www.tsukumo.co.jp/bto/faq/120005.html https://news.livedoor.com/article/detail/13932272/
it so difficult? Product assembly is Always about manipulation of diverse parts types of screws types of packages types of connectors Different sizes, shapes, frictions, … ؞ ؞ ؞ That's one small thing for a man, one giant leap for a robot.
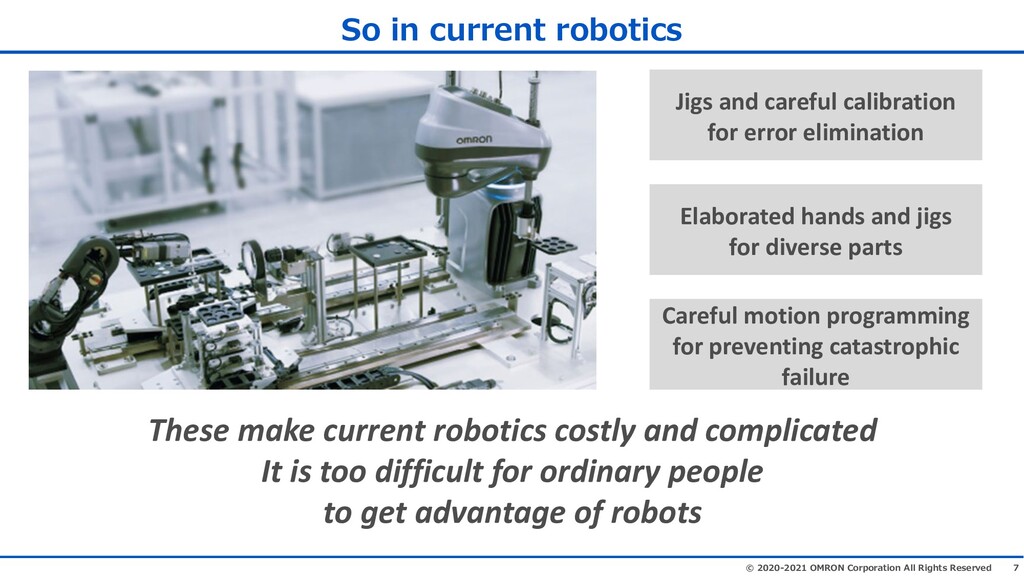
current robotics Jigs and careful calibration for error elimination Careful motion programming for preventing catastrophic failure Elaborated hands and jigs for diverse parts These make current robotics costly and complicated It is too difficult for ordinary people to get advantage of robots
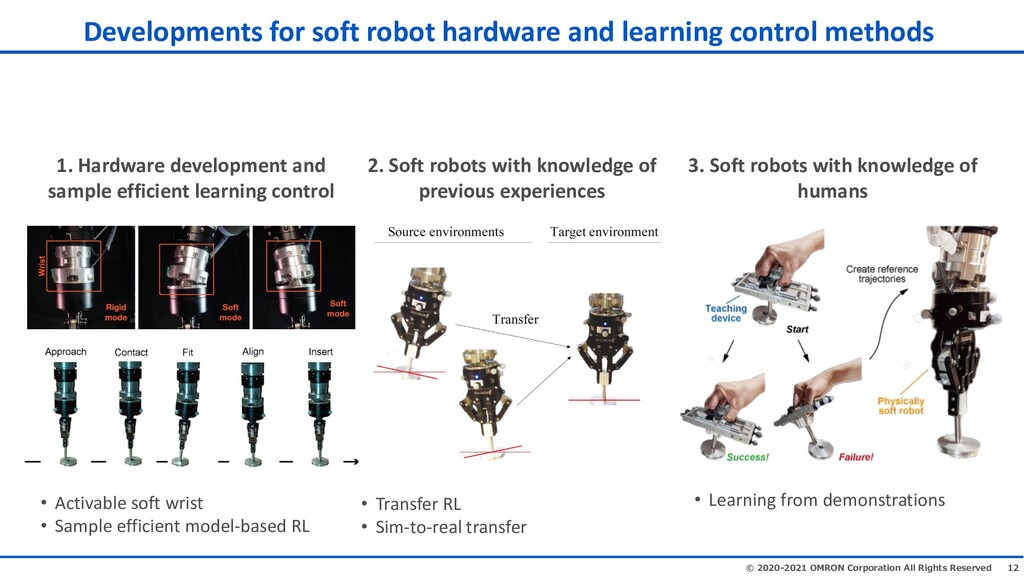
soft robot hardware and learning control methods 1. Hardware development and sample efficient learning control 3. Soft robots with knowledge of humans 2. Soft robots with knowledge of previous experiences • Activable soft wrist • Sample efficient model-based RL • Transfer RL • Sim-to-real transfer • Learning from demonstrations
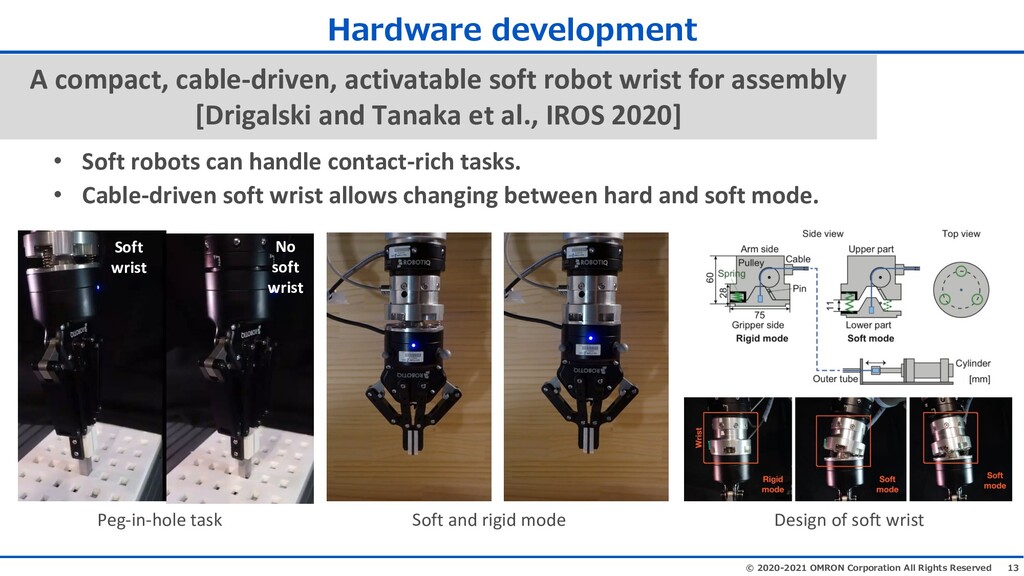
robots can handle contact-rich tasks. • Cable-driven soft wrist allows changing between hard and soft mode. A compact, cable-driven, activatable soft robot wrist for assembly [Drigalski and Tanaka et al., IROS 2020] Hardware development Peg-in-hole task Soft and rigid mode Design of soft wrist Soft wrist No soft wrist
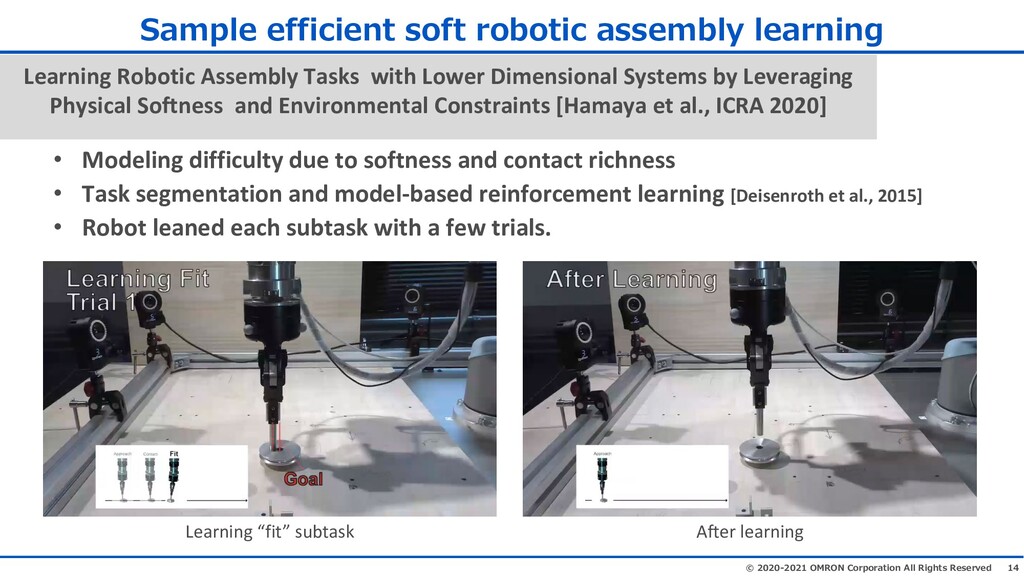
difficulty due to softness and contact richness • Task segmentation and model-based reinforcement learning [Deisenroth et al., 2015] • Robot leaned each subtask with a few trials. Learning Robotic Assembly Tasks with Lower Dimensional Systems by Leveraging Physical Softness and Environmental Constraints [Hamaya et al., ICRA 2020] Sample efficient soft robotic assembly learning Learning “fit” subtask After learning
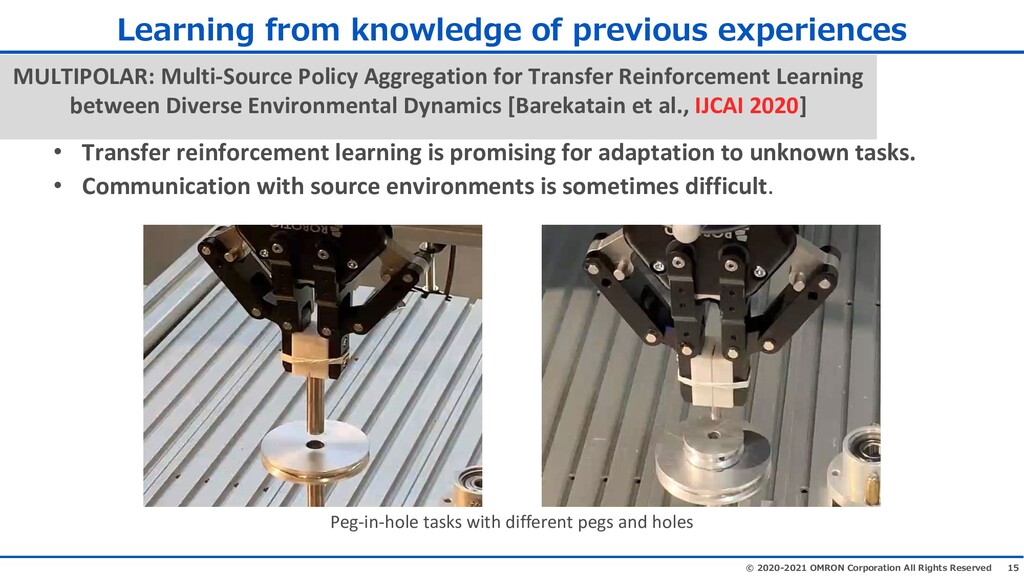
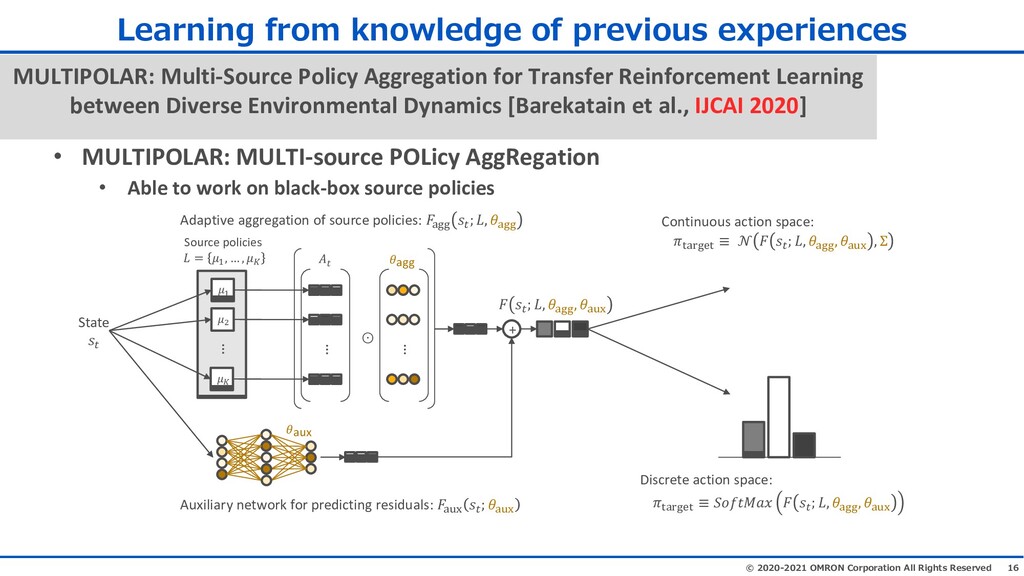
reinforcement learning is promising for adaptation to unknown tasks. • Communication with source environments is sometimes difficult. MULTIPOLAR: Multi-Source Policy Aggregation for Transfer Reinforcement Learning between Diverse Environmental Dynamics [Barekatain et al., IJCAI 2020] Learning from knowledge of previous experiences Peg-in-hole tasks with different pegs and holes
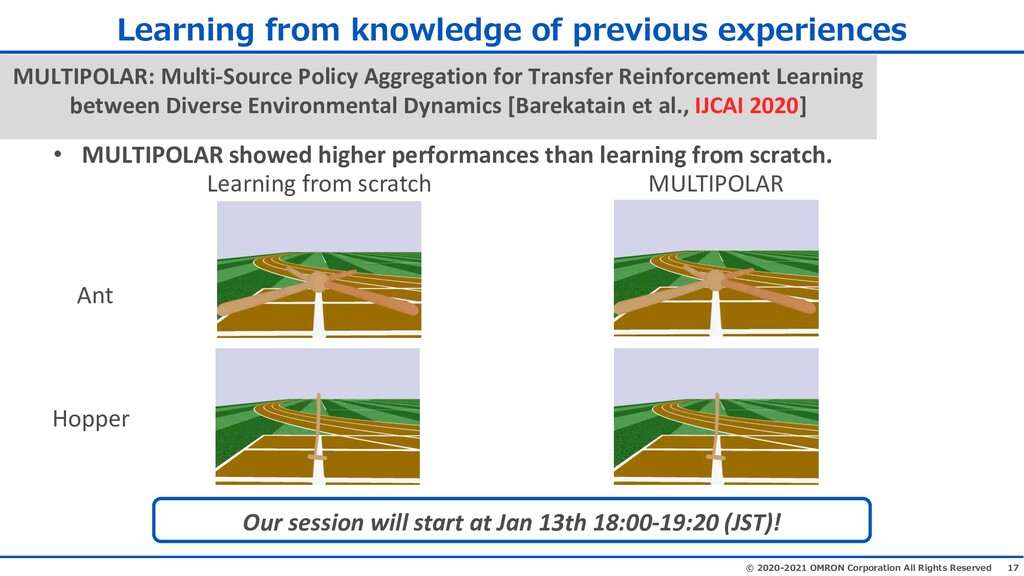
showed higher performances than learning from scratch. Learning from knowledge of previous experiences MULTIPOLAR Learning from scratch Ant Hopper MULTIPOLAR: Multi-Source Policy Aggregation for Transfer Reinforcement Learning between Diverse Environmental Dynamics [Barekatain et al., IJCAI 2020] Our session will start at Jan 13th 18:00-19:20 (JST)!
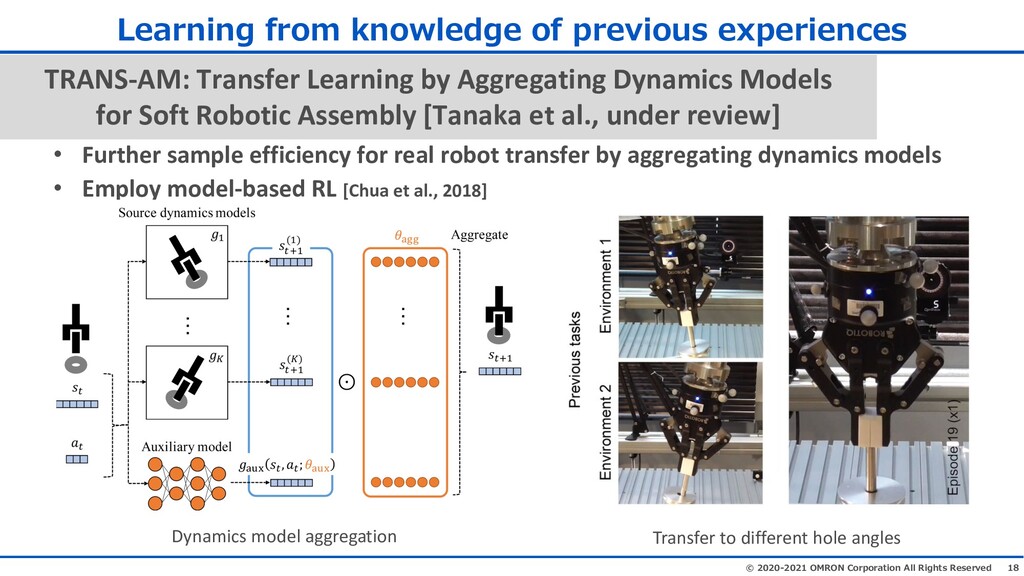
sample efficiency for real robot transfer by aggregating dynamics models • Employ model-based RL [Chua et al., 2018] TRANS-AM: Transfer Learning by Aggregating Dynamics Models for Soft Robotic Assembly [Tanaka et al., under review] Learning from knowledge of previous experiences Dynamics model aggregation Transfer to different hole angles
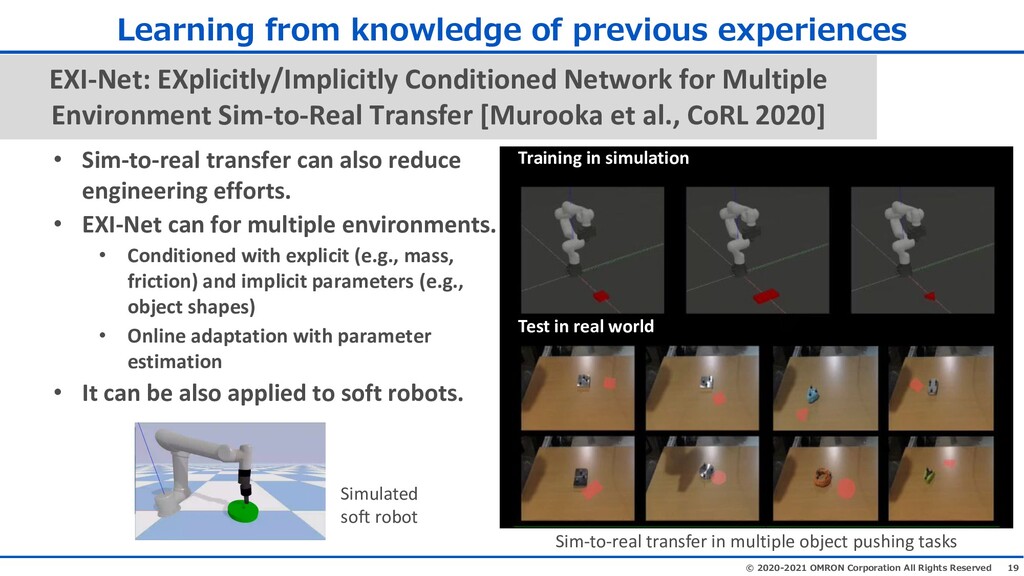
transfer can also reduce engineering efforts. • EXI-Net can for multiple environments. • Conditioned with explicit (e.g., mass, friction) and implicit parameters (e.g., object shapes) • Online adaptation with parameter estimation • It can be also applied to soft robots. EXI-Net: EXplicitly/Implicitly Conditioned Network for Multiple Environment Sim-to-Real Transfer [Murooka et al., CoRL 2020] Learning from knowledge of previous experiences Training in simulation Test in real world Sim-to-real transfer in multiple object pushing tasks Simulated soft robot
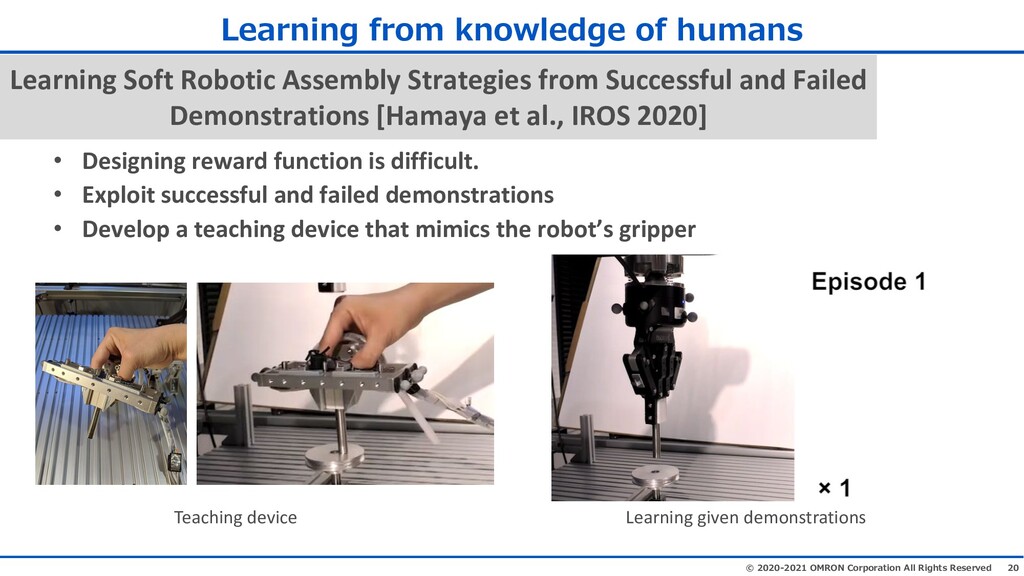
reward function is difficult. • Exploit successful and failed demonstrations • Develop a teaching device that mimics the robot’s gripper Learning Soft Robotic Assembly Strategies from Successful and Failed Demonstrations [Hamaya et al., IROS 2020] Learning from knowledge of humans Teaching device Learning given demonstrations
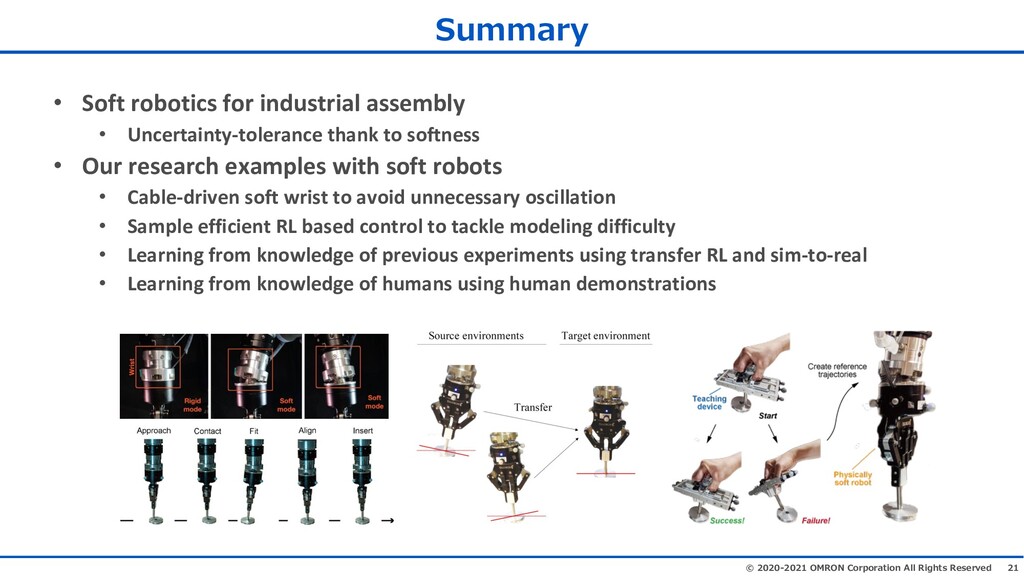
robotics for industrial assembly • Uncertainty-tolerance thank to softness • Our research examples with soft robots • Cable-driven soft wrist to avoid unnecessary oscillation • Sample efficient RL based control to tackle modeling difficulty • Learning from knowledge of previous experiments using transfer RL and sim-to-real • Learning from knowledge of humans using human demonstrations Summary
with tactile sensors • In-hand-pose estimation [Drigalski et al., ICRA 2020] • In-hand manipulation for blind bin picking [Ishige et al., IROS 2020] • Combining assembly strategies with tactile sensors • Safe and recovery RL with physical and computational safety Future works In-hand pose estimation [Drigalski et al., ICRA 2020] In-hand manipulation [Ishige et al., IROS 2020]
Diabolo control [Drigalski and Joshi et al., under review] We are hiring internship students and full researchers. If you are interested in positions at OMRON SINIC X, please email us. [email protected]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}