Jenny Midwinter at May 21, 2019 event of montrealml.dev
Title: CNN Based Auto-Pilot for a Wheelchair: A brief story of the results of rapid development of a CNN based self driving wheelchair using open source software & low cost hardware
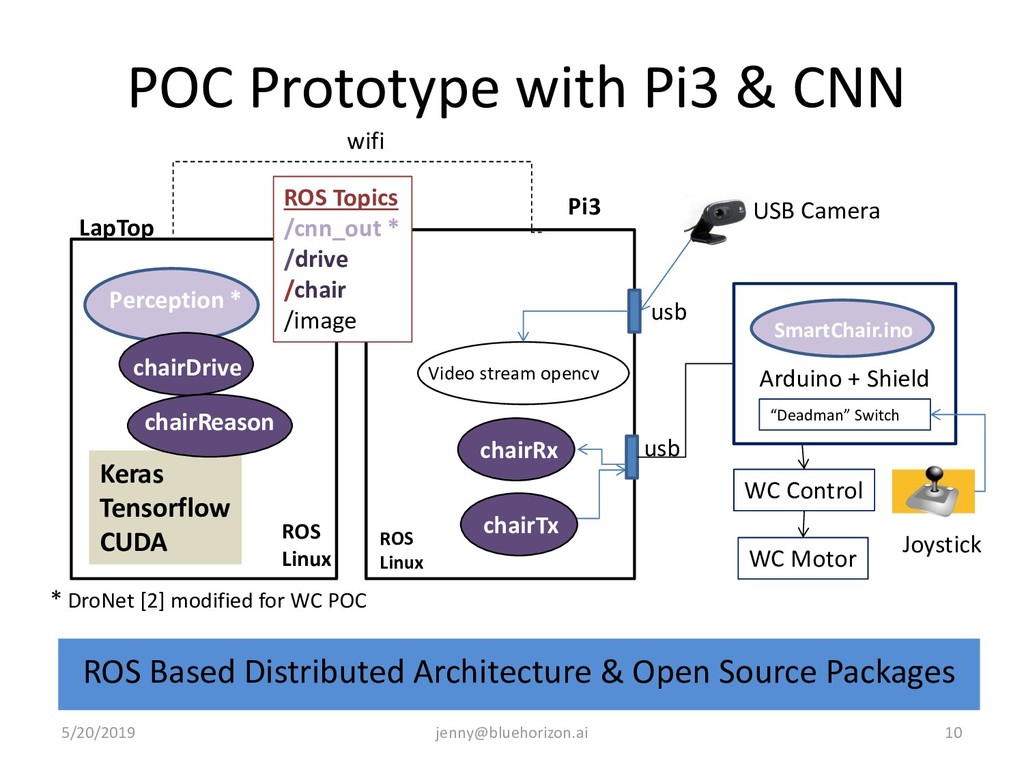
Summary: This lightening talk describes the development & results that were successfully used to create a proof-of-concept (POC) prototype for a CNN based auto-pilot function that was able to autonomously drive a wheelchair based on a single input image stream from forward facing camera . A brief explanation of how the CNN is used to autonomously drive the wheelchair is provided, including a short video demo. As well, a description of the low-cost hardware/software system, & the learnings that were obtained, now being used as a basis for the next stage of development, will also be presented.
Bio: Jenny is collaborating as Chief Scientist, Applied AI, at Eightfold Technologies, and responsible for the development of vision based self-driving technology for Eightfold’s SmartChair. She is the CEO and founder of Blue Horizon AI, a start up dedicated to applying AI in autonomous technologies to assist the disabled. Prior to this, she has 25 years experience in R&D in the Telecom Industry.
{kind=link}
![5/20/2019 [email protected] 2 Stewart Midwinter • Address the extreme difficulty](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
![WC POC Auto-Pilot Run-Time Process 5/20/2019 [email protected] 5 Image Pre-Processing](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_4.jpg){kind=link}
![Demo of Results “Beta” 5/20/2019 [email protected] 6](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_5.jpg){kind=link}
![Eightfold’s Smart Chair: A Remote Virtual Joystick 5/20/2019 [email protected] 7](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_6.jpg){kind=link}
![Eightfold’s Custom Arduino Board 5/20/2019 [email protected] 8 Controls Voltage Lines](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_7.jpg){kind=link}
![Self-Driving Wheelchair (Alpha) 5/20/2019 [email protected] 9 Custom Arduino USB Webcam](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![The Team 5/20/2019 [email protected] 15 Ke Wang Smart Chair Software](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_14.jpg){kind=link}
![Blooper – Running Into Curb 5/20/2019 [email protected] 16](https://files.speakerdeck.com/presentations/63a4a502808748a5947b7c001c2c465d/slide_15.jpg){kind=link}
{kind=link}