(erradamente) e Arquimedes (alavanca, empuxo). Galileu realizou experimentos mostrando que corpos eram acelerados pela força da gravidade, refutando a teoria aristotélica (cristalizada pela Igreja). As três leis de Newton, estabelecendo o conceito de força de forma clara, foram apresentadas em seu famoso livro, publicado em 1687.
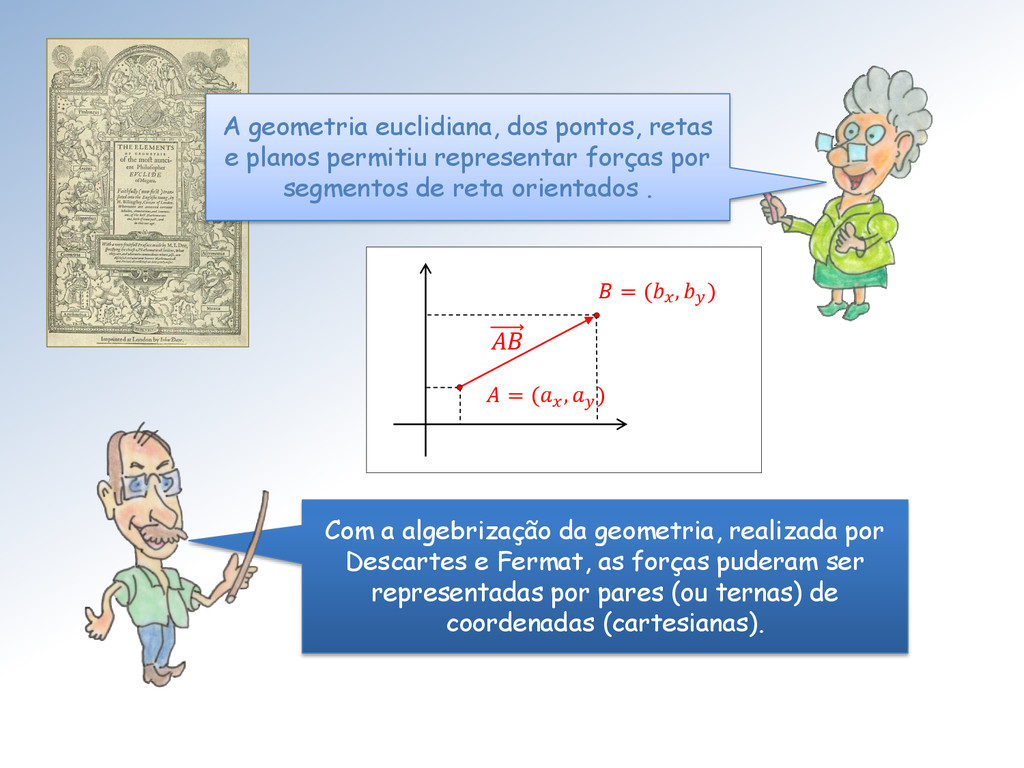
as forças puderam ser representadas por pares (ou ternas) de coordenadas (cartesianas). A geometria euclidiana, dos pontos, retas e planos permitiu representar forças por segmentos de reta orientados . = ( , ) = ( , )
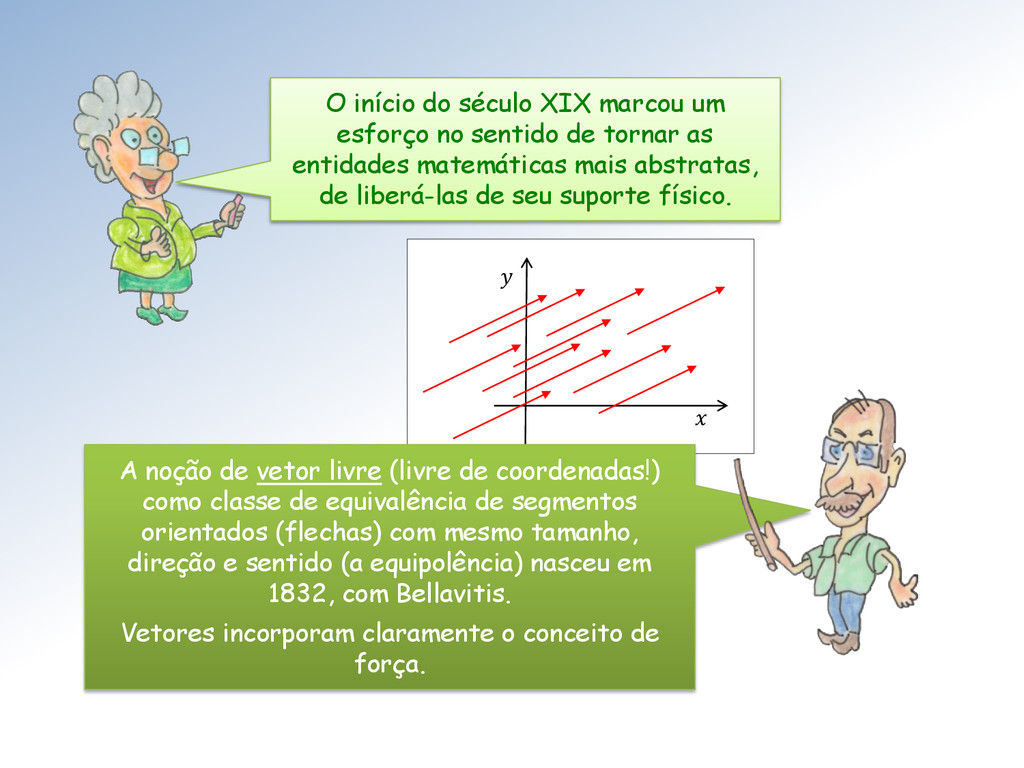
de tornar as entidades matemáticas mais abstratas, de liberá-las de seu suporte físico. A noção de vetor livre (livre de coordenadas!) como classe de equivalência de segmentos orientados (flechas) com mesmo tamanho, direção e sentido (a equipolência) nasceu em 1832, com Bellavitis. Vetores incorporam claramente o conceito de força.
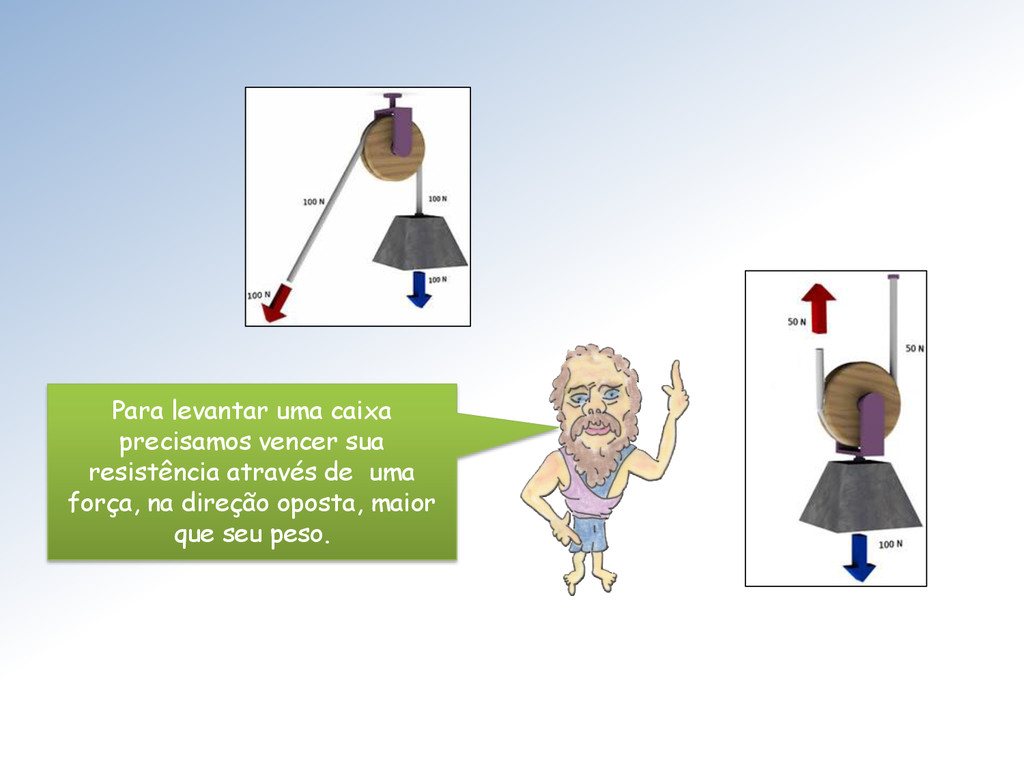
Possuem direção, sentido e magnitude. Normalmente são aplicadas num ponto específico de um corpo – às vezes o centro de massa. O conceito de vetor livre é extremamente utilizado em física e engenharias, por exemplo na composição de forças.
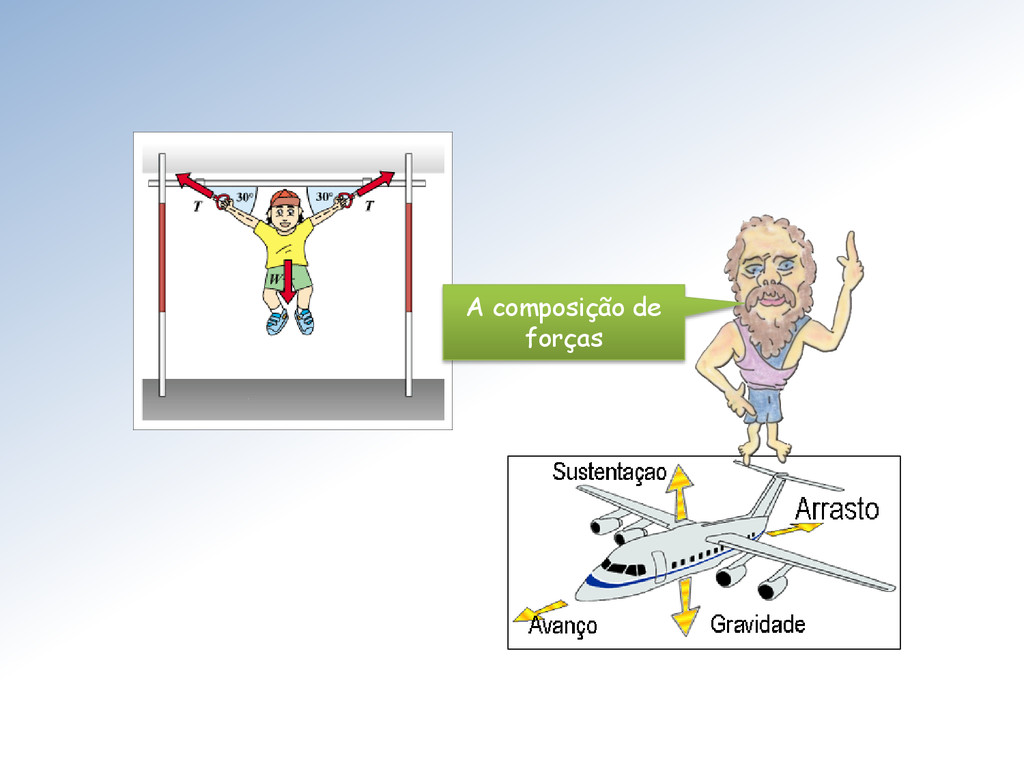
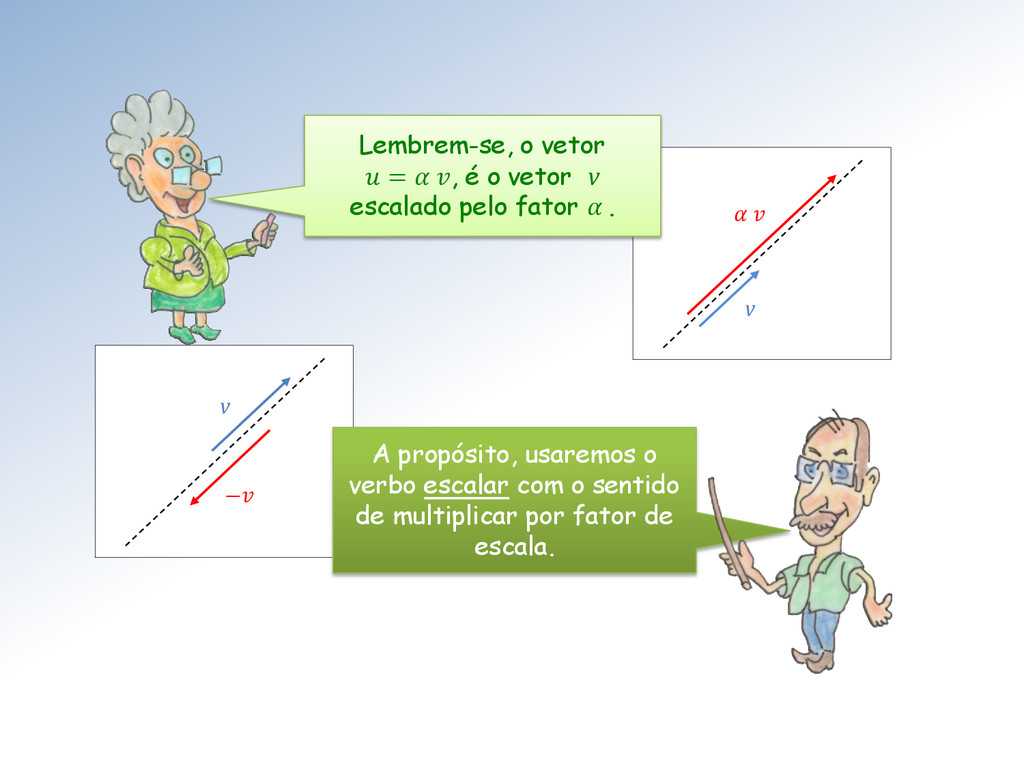
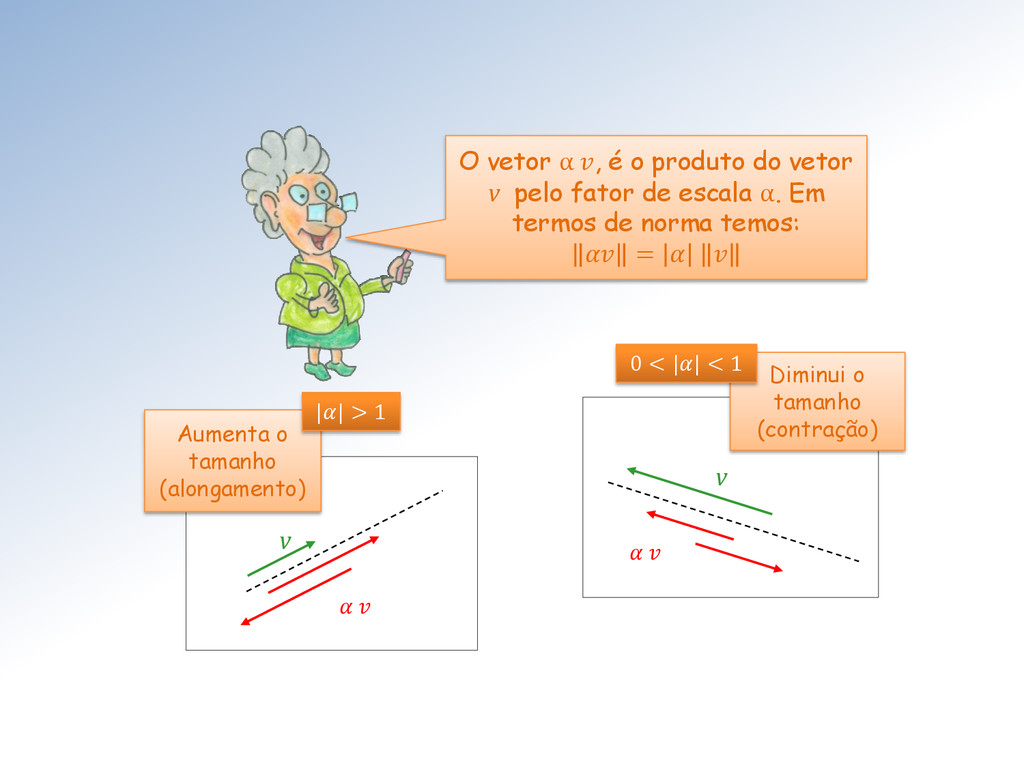
composição de forças. — A multiplicação de um vetor por fator de escala, está associada a equilibrar uma força, a aumentá-la ou reduzi-la. As operações fundamentais com vetores estão diretamente associadas ao conceito de força.
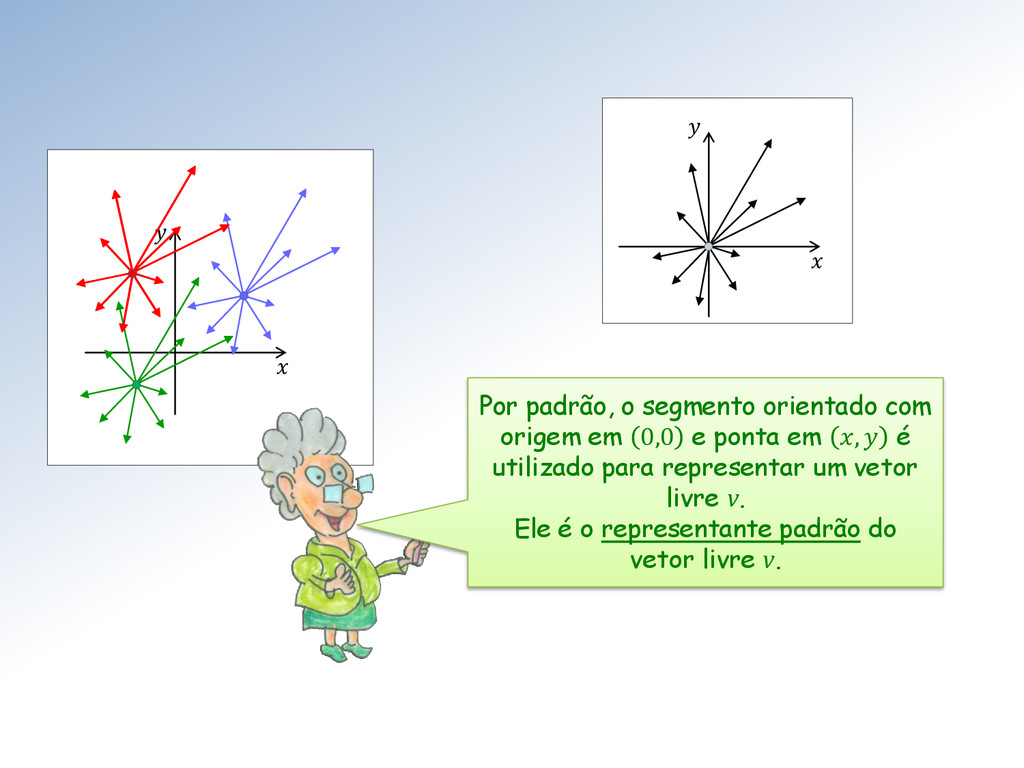
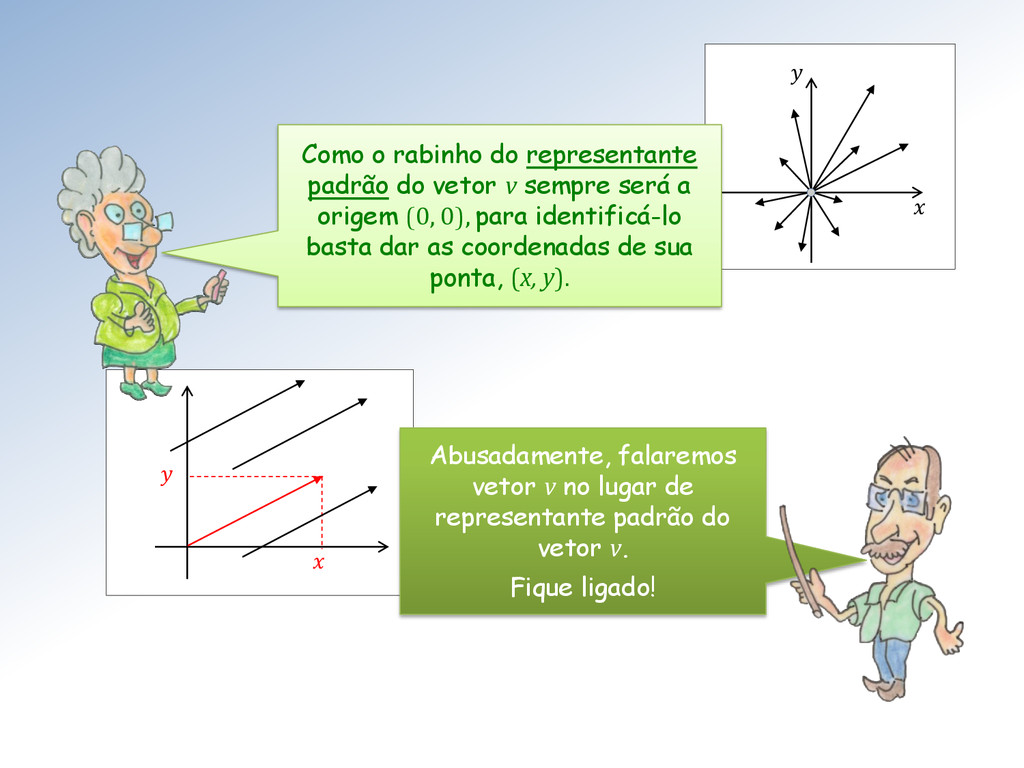
será a origem (0, 0), para identificá-lo basta dar as coordenadas de sua ponta, (x, y). Abusadamente, falaremos vetor v no lugar de representante padrão do vetor v. Fique ligado!
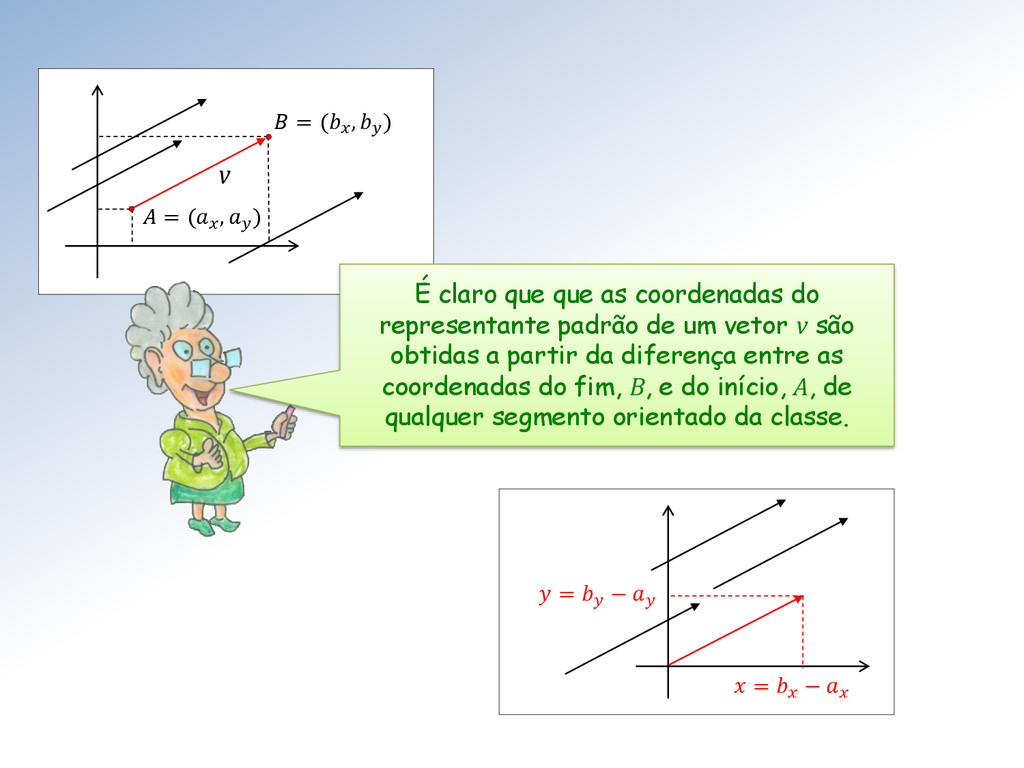
( , ) É claro que que as coordenadas do representante padrão de um vetor v são obtidas a partir da diferença entre as coordenadas do fim, B, e do início, A, de qualquer segmento orientado da classe.
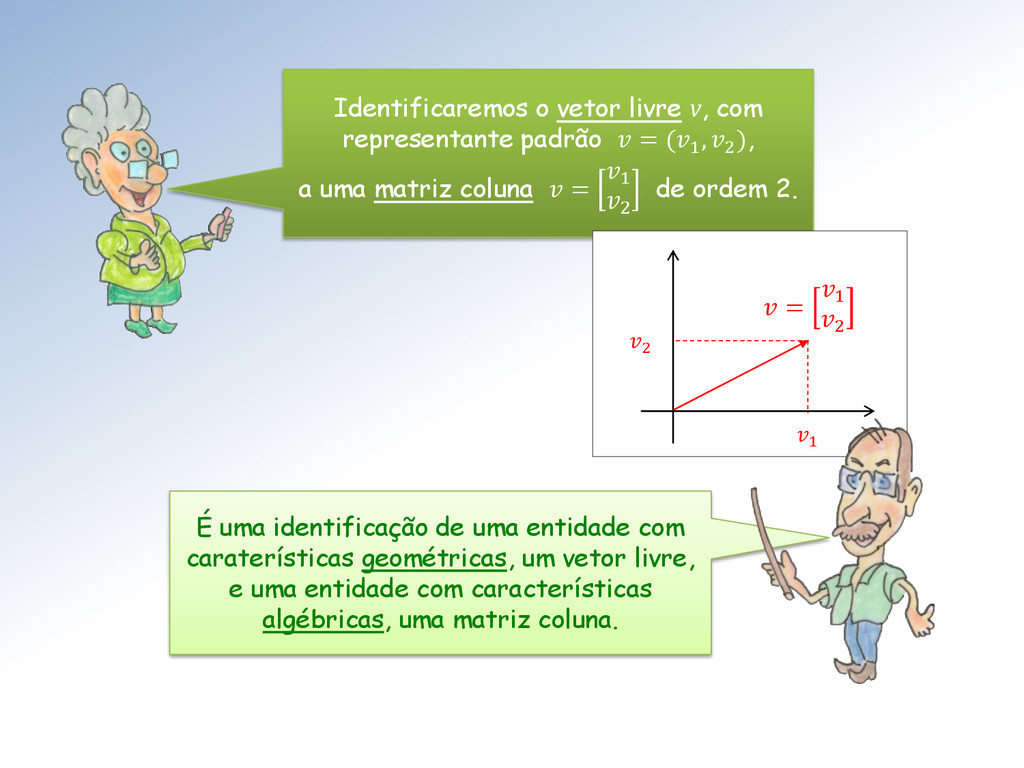
, 2 ), a uma matriz coluna = 1 2 de ordem 2. 2 1 = 1 2 É uma identificação de uma entidade com caraterísticas geométricas, um vetor livre, e uma entidade com características algébricas, uma matriz coluna.
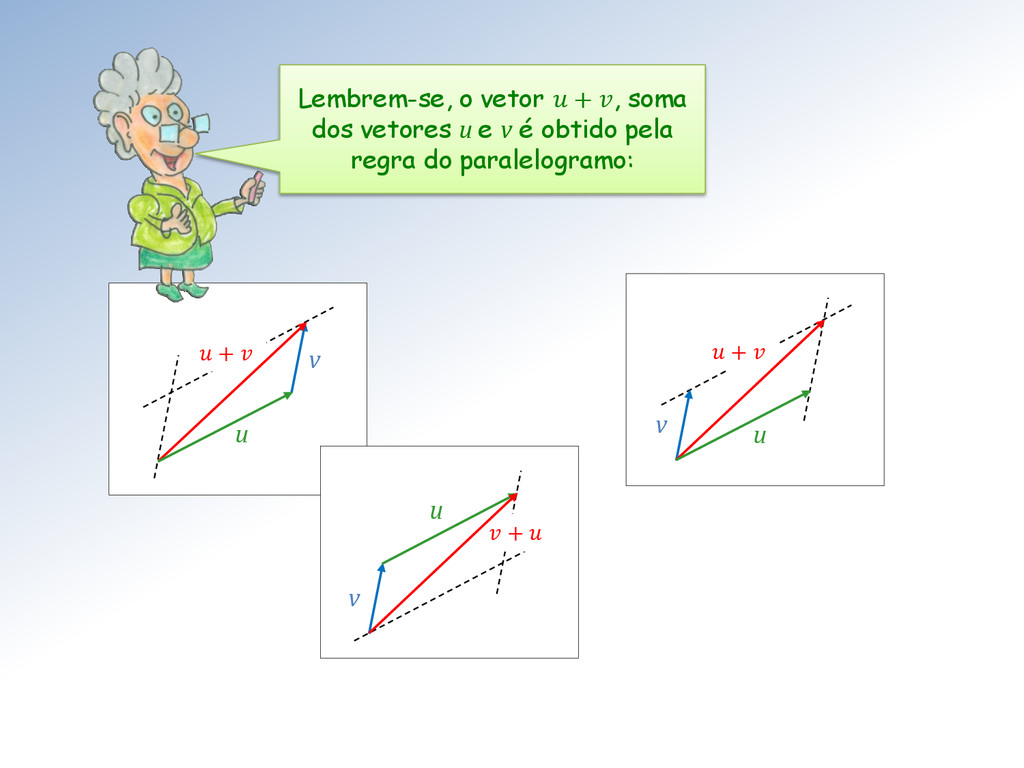
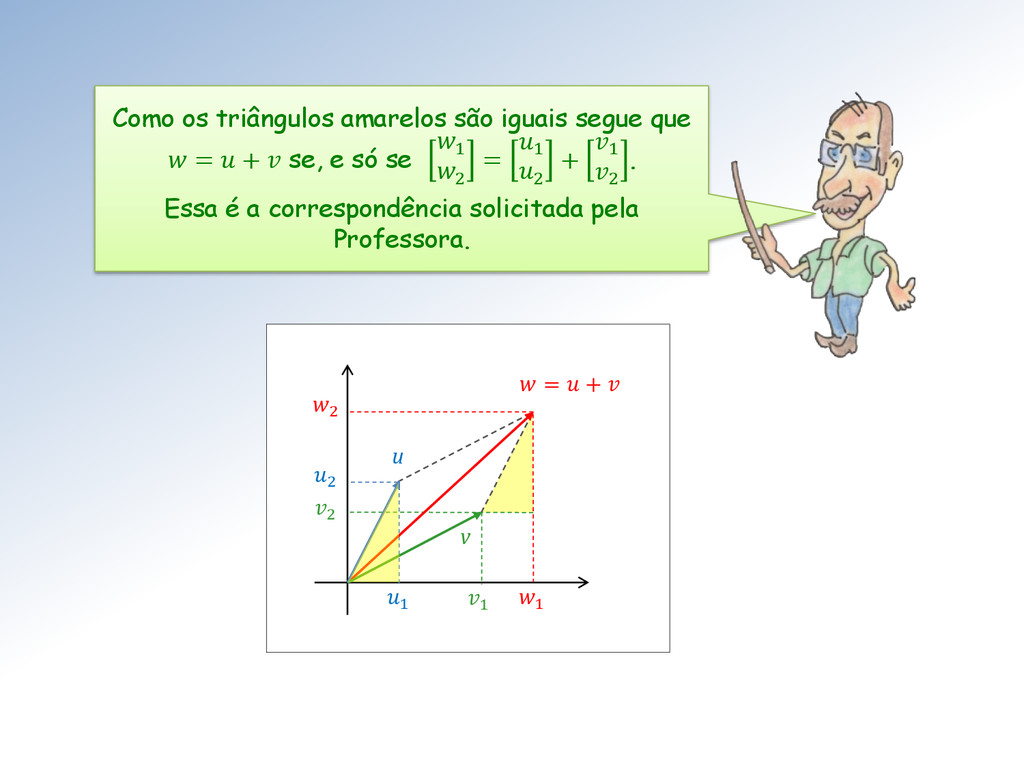
entre: • a adição de vetores via regra do paralelogramo • e a adição de matrizes coluna E garantir também a correspondência entre: • a multiplicação de um vetor livre por um fator de escala • e a multiplicação de uma matriz coluna por um número real
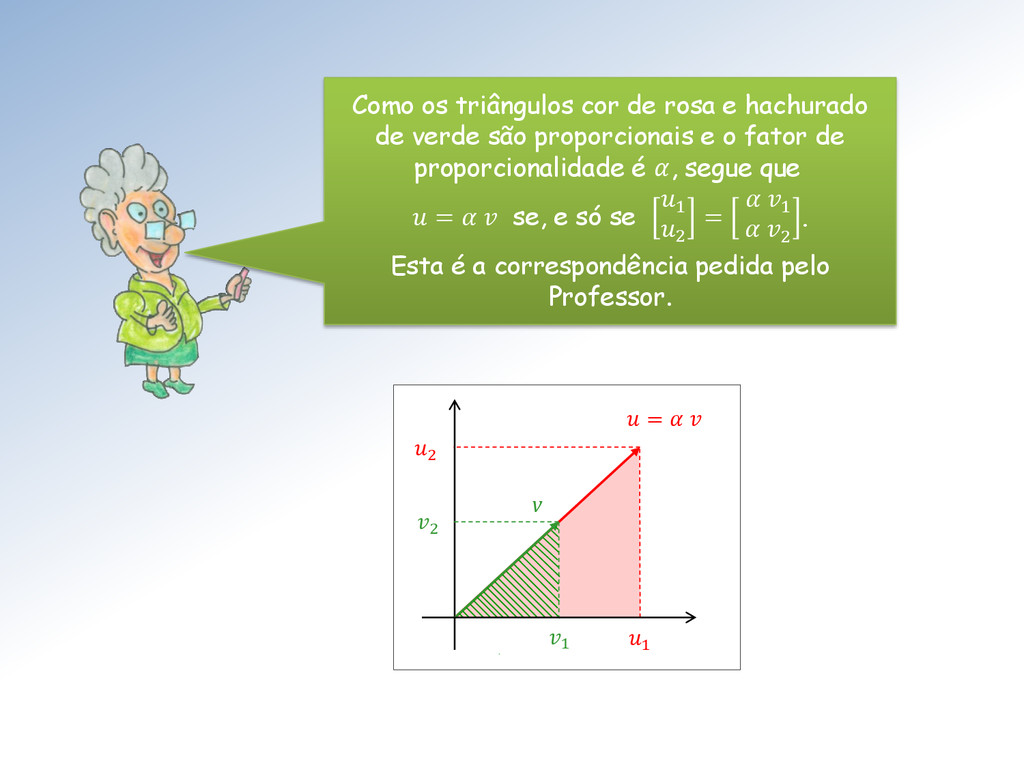
de rosa e hachurado de verde são proporcionais e o fator de proporcionalidade é , segue que = se, e só se 1 2 = 1 2 . Esta é a correspondência pedida pelo Professor.
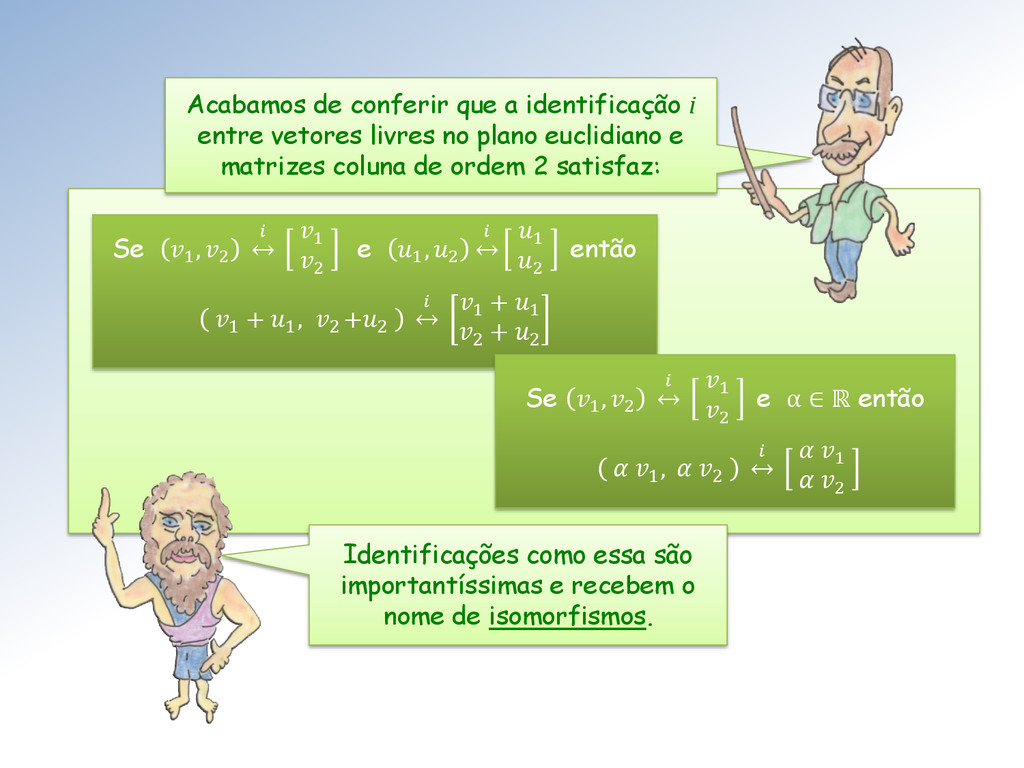
1 2 então 1 + 1 , 2 +2 1 + 1 2 + 2 Se 1 , 2 1 2 e α ∈ ℝ então 1 , 2 1 2 Identificações como essa são importantíssimas e recebem o nome de isomorfismos. Acabamos de conferir que a identificação i entre vetores livres no plano euclidiano e matrizes coluna de ordem 2 satisfaz:
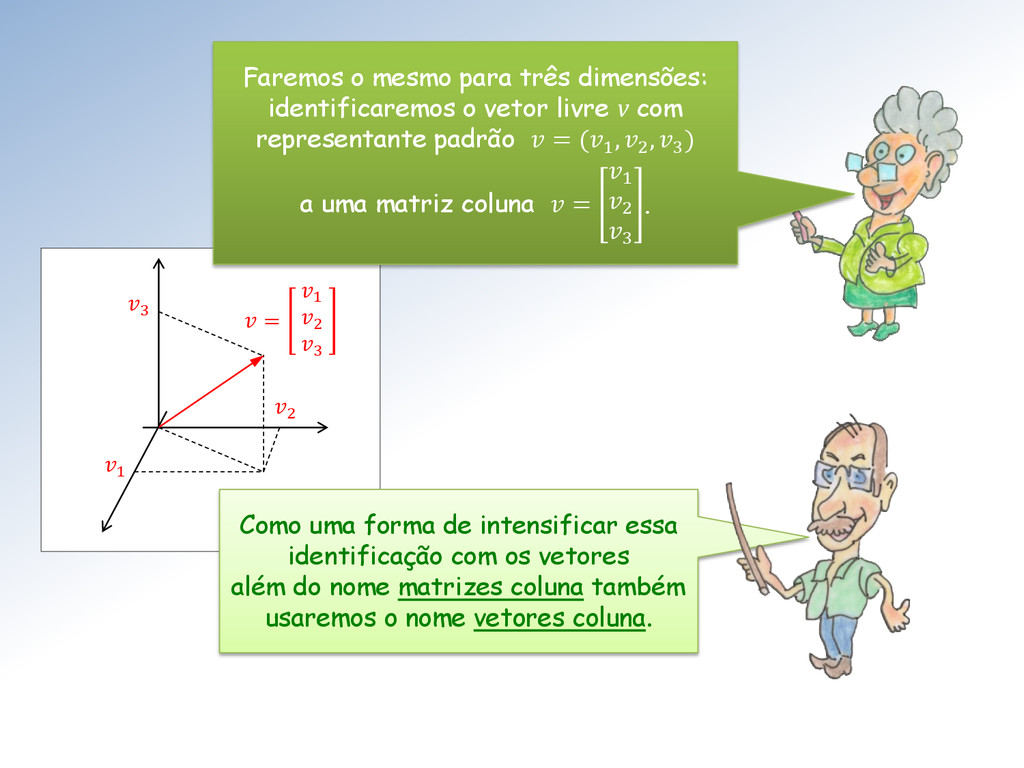
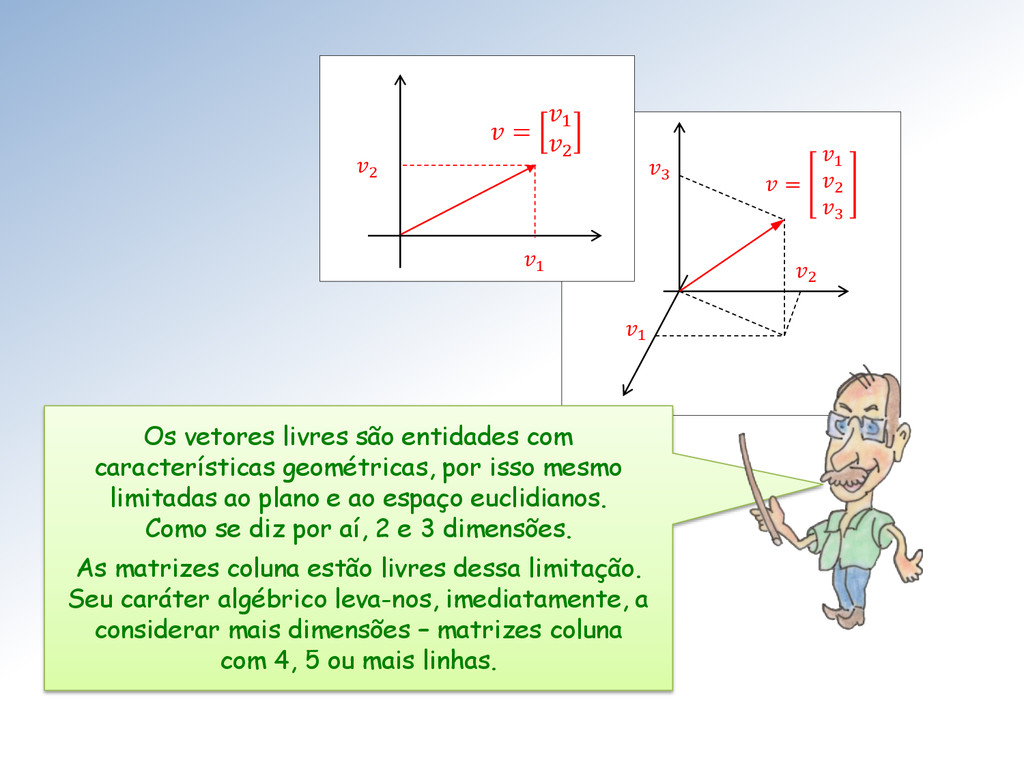
para três dimensões: identificaremos o vetor livre v com representante padrão = (1 , 2 , 3 ) a uma matriz coluna = 1 2 3 . Como uma forma de intensificar essa identificação com os vetores além do nome matrizes coluna também usaremos o nome vetores coluna.
1 2 Os vetores livres são entidades com características geométricas, por isso mesmo limitadas ao plano e ao espaço euclidianos. Como se diz por aí, 2 e 3 dimensões. As matrizes coluna estão livres dessa limitação. Seu caráter algébrico leva-nos, imediatamente, a considerar mais dimensões – matrizes coluna com 4, 5 ou mais linhas.
vocês dois transportarão para matrizes coluna tudo o que percebemos com nossos sentidos. Elas são do mundo das ideias. Já minha metade aristotélica admite estender a outros entes matemáticos nossa percepção euclidiana de distâncias, tamanhos, ângulos, sombras...
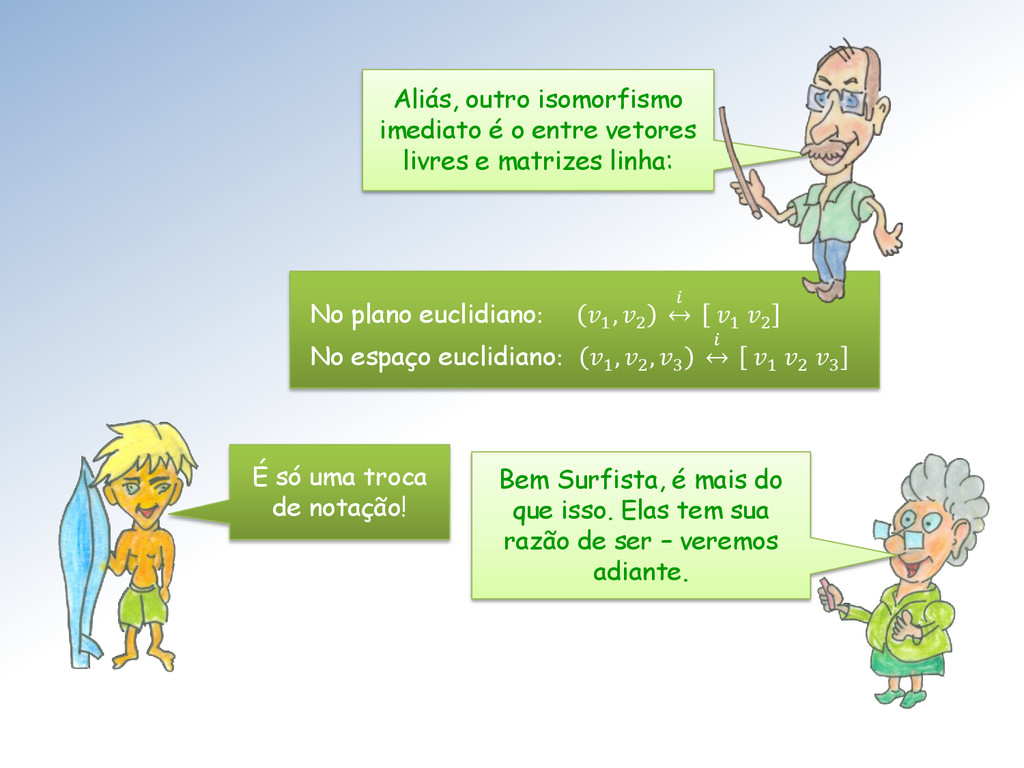
euclidiano: 1 , 2 , 3 1 2 3 Aliás, outro isomorfismo imediato é o entre vetores livres e matrizes linha: É só uma troca de notação! Bem Surfista, é mais do que isso. Elas tem sua razão de ser – veremos adiante.
e operaremos algebricamente com matrizes coluna ou com matrizes linha. Afinal de contas o espaço euclidiano é o mundo dos nossos sentidos! A partir de agora usaremos essas identificações de forma indiscriminada.
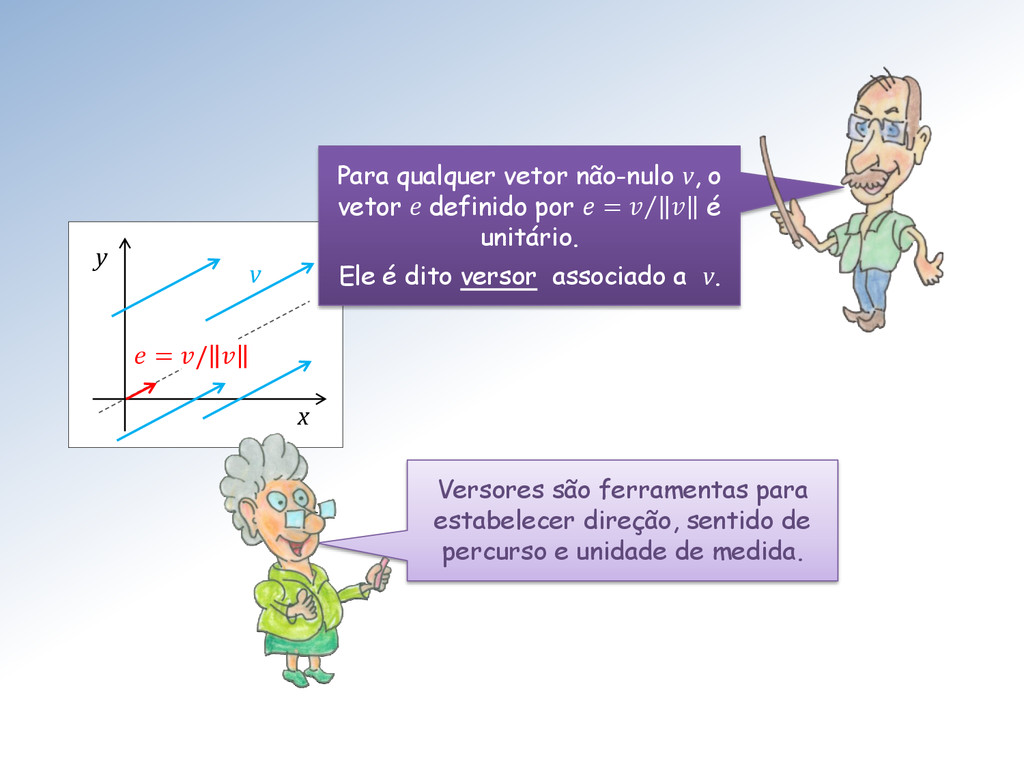
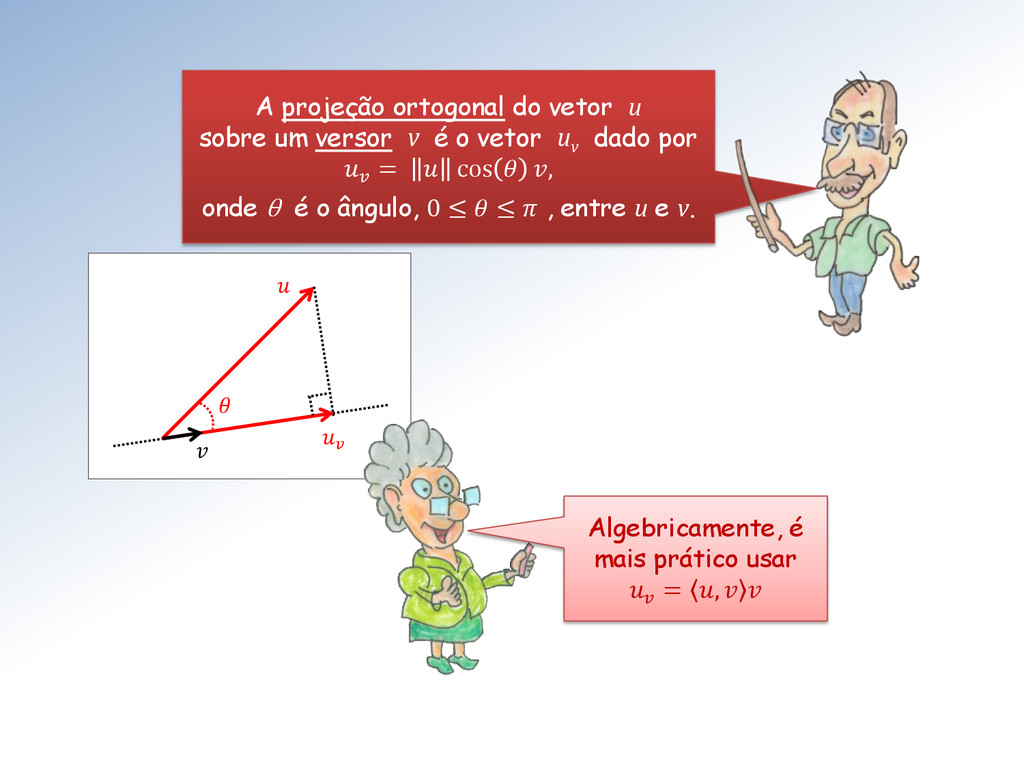
o vetor e definido por = é unitário. Ele é dito versor associado a v. Versores são ferramentas para estabelecer direção, sentido de percurso e unidade de medida.
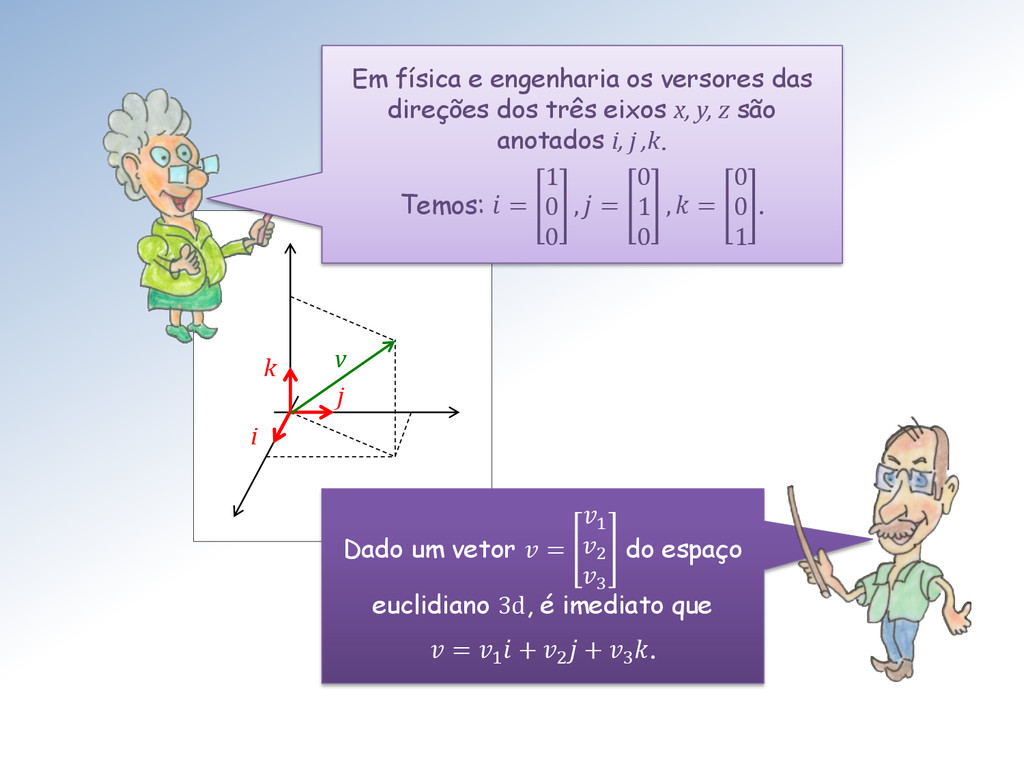
das direções dos três eixos x, y, z são anotados i, j ,k. Temos: = 1 0 0 , = 0 1 0 , = 0 0 1 . Dado um vetor = 1 2 3 do espaço euclidiano 3d, é imediato que = 1 + 2 + 3 .
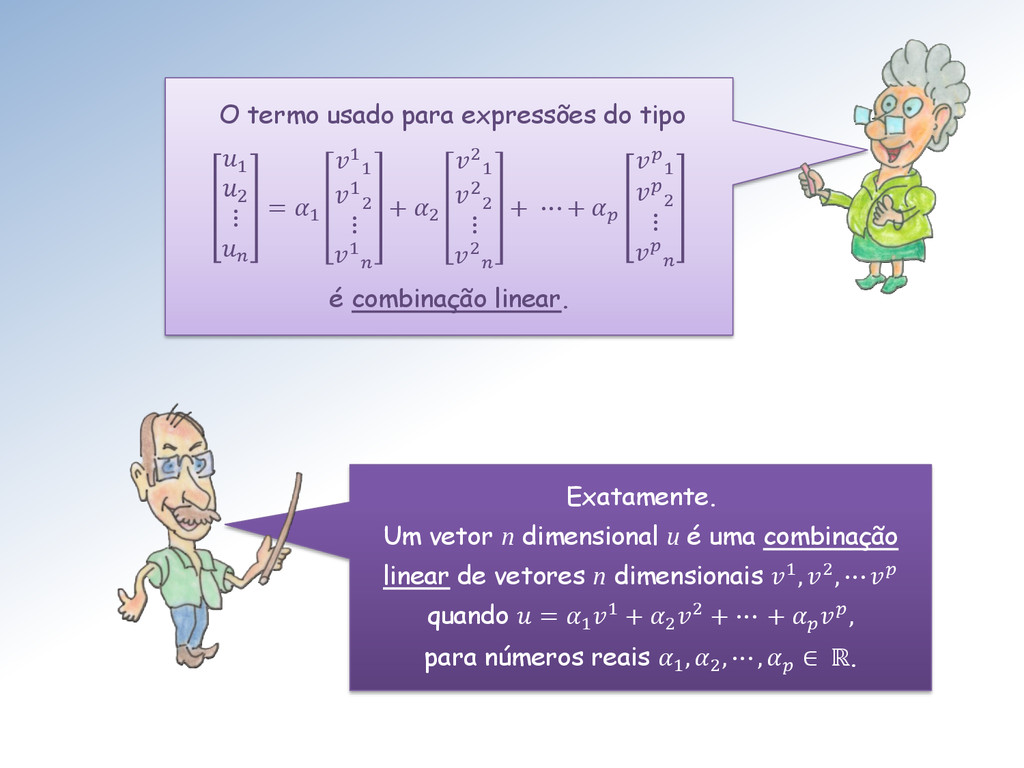
que mais poderemos fazer além de combinações desse tipo? Muitas coisas mais, minha filha, mas você lembrou-me de um termo importante. Mestres, podemos fazer pouca coisa com vetores. Só umas combinações tipo 2 3. −1. 2.5 + 0.5 0.4 1.5 2.0 .
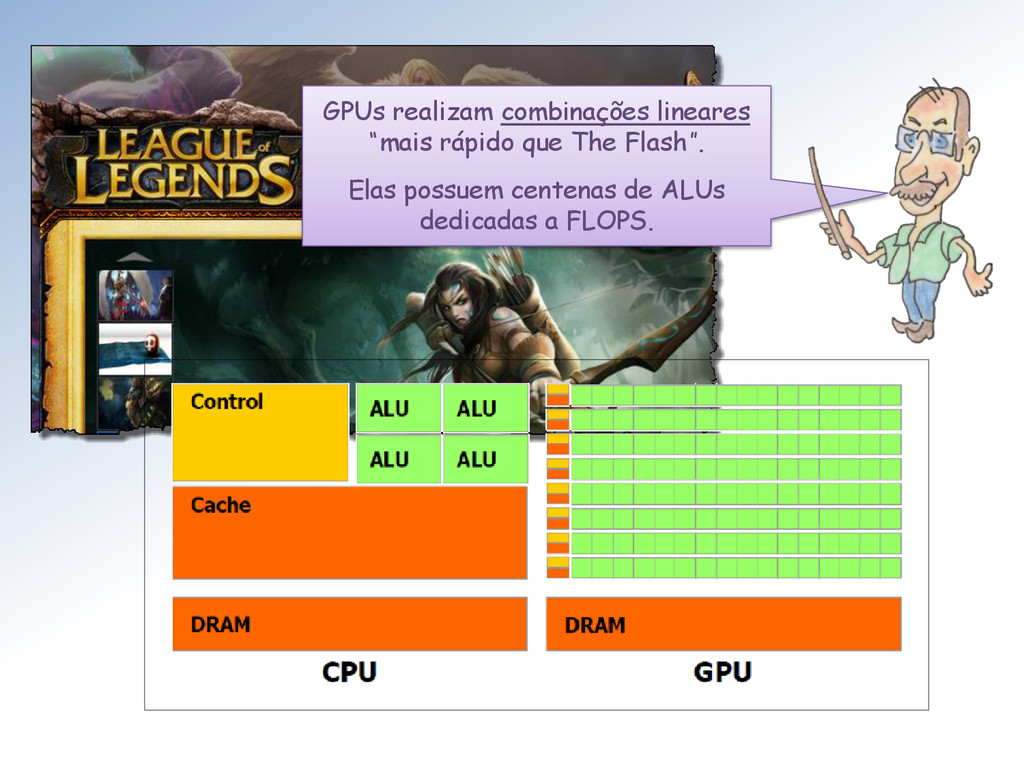
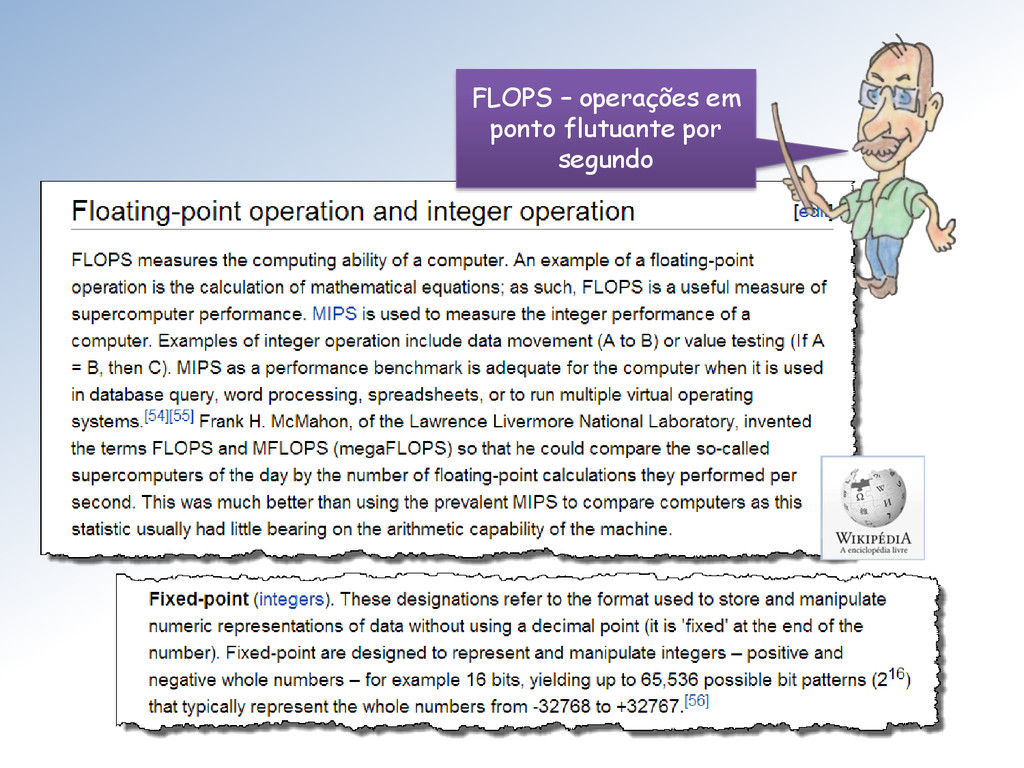
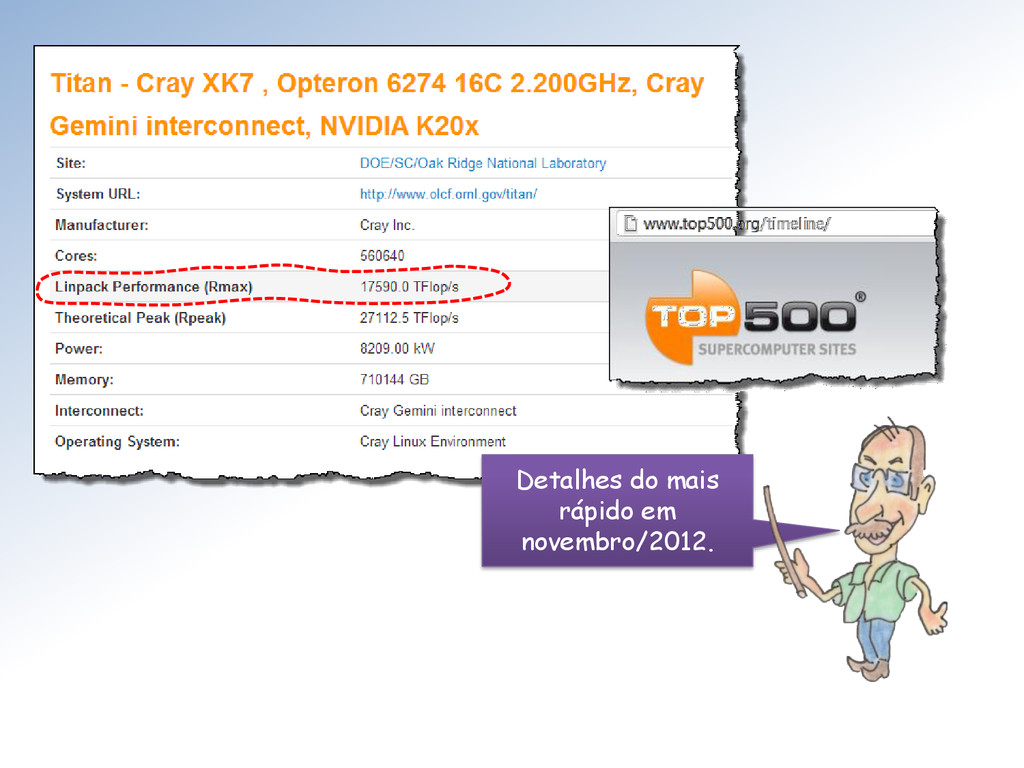
começou a funcionar em 1946, eles fazem isso. Foram criados para efetuar montanhas de adições e multiplicações. É, mas hoje fazem muito mais. Para jogar League of Legends preciso de acesso à Internet e de uma GPU para suportar os gráficos.
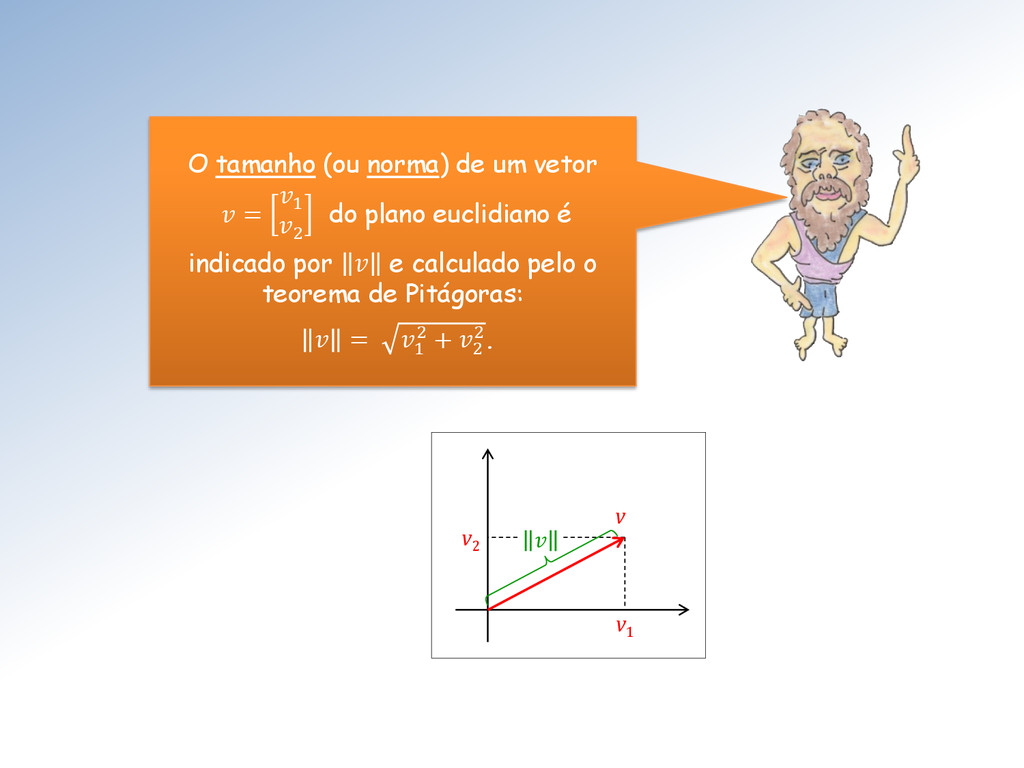
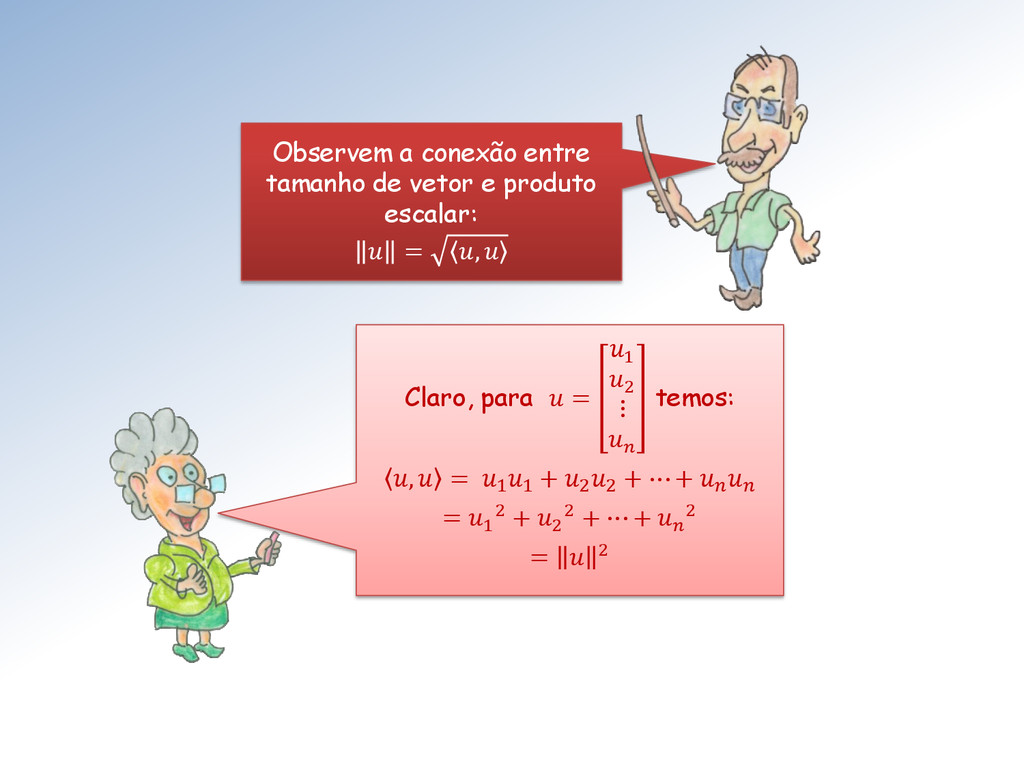
euclidiano precisamos aplicar o teorema de Pitágoras duas vezes, para obter = 1 2 + 2 2 + 3 2. E para = 1 2 ⋮ definimos sua norma por = 1 2 + 2 2 + ⋯ + 2. Eis nossa 1ª extensão, Filósofo.
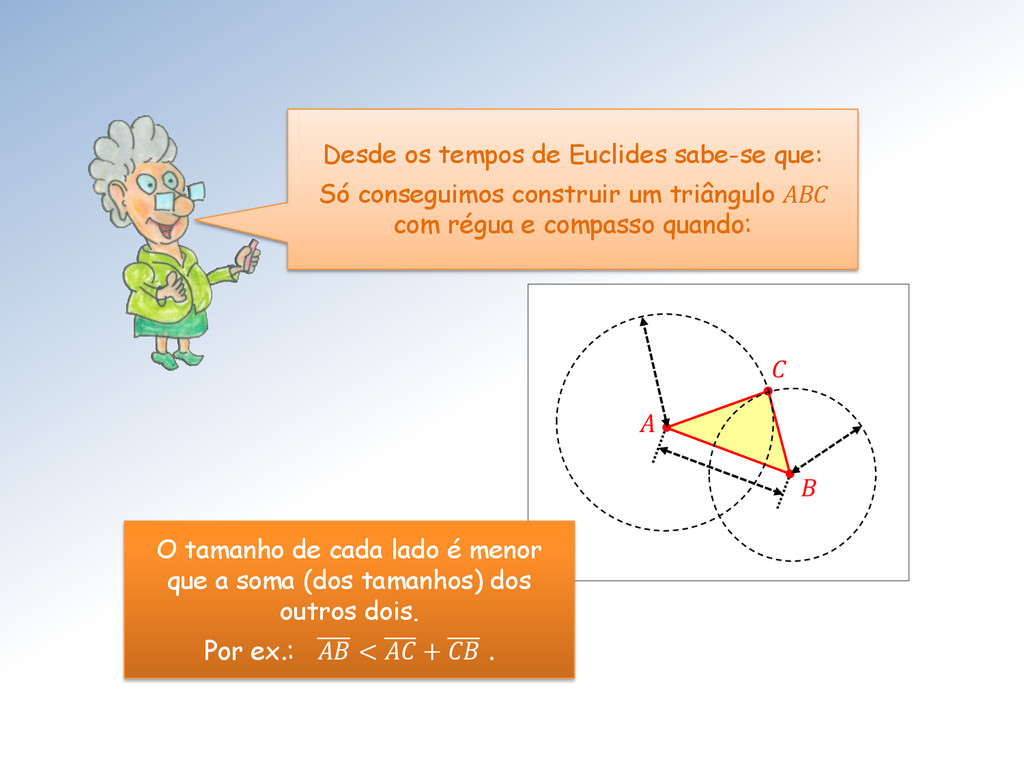
Só conseguimos construir um triângulo ABC com régua e compasso quando: O tamanho de cada lado é menor que a soma (dos tamanhos) dos outros dois. Por ex.: < + .
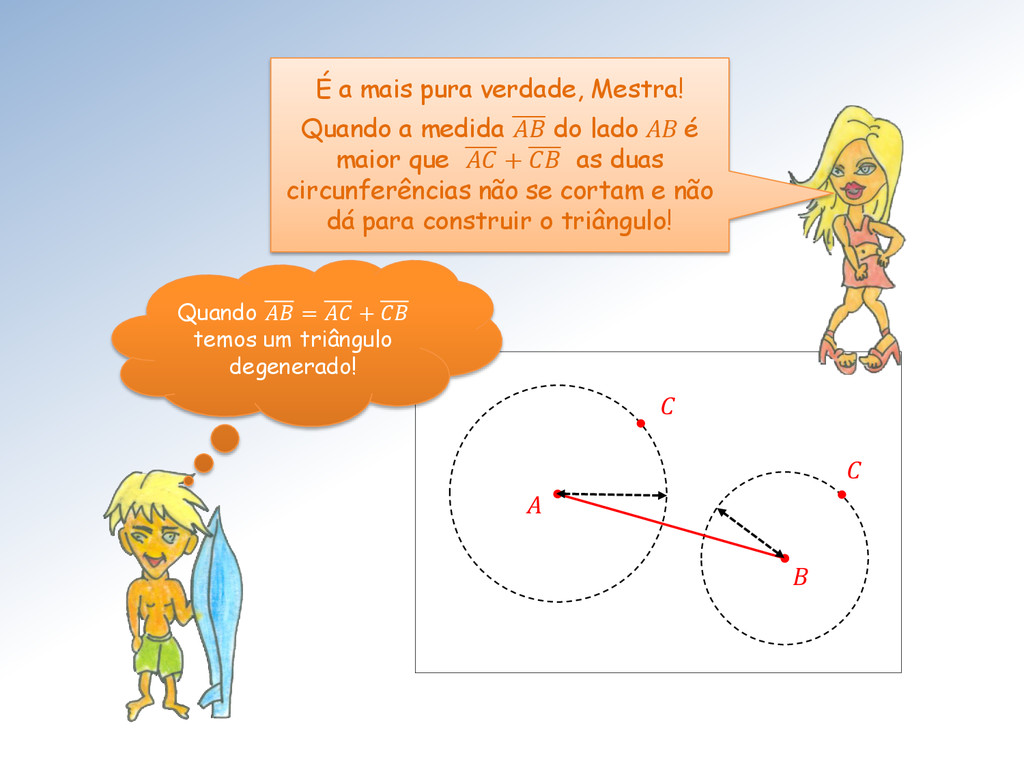
Quando a medida do lado AB é maior que + as duas circunferências não se cortam e não dá para construir o triângulo! Quando = + temos um triângulo degenerado!
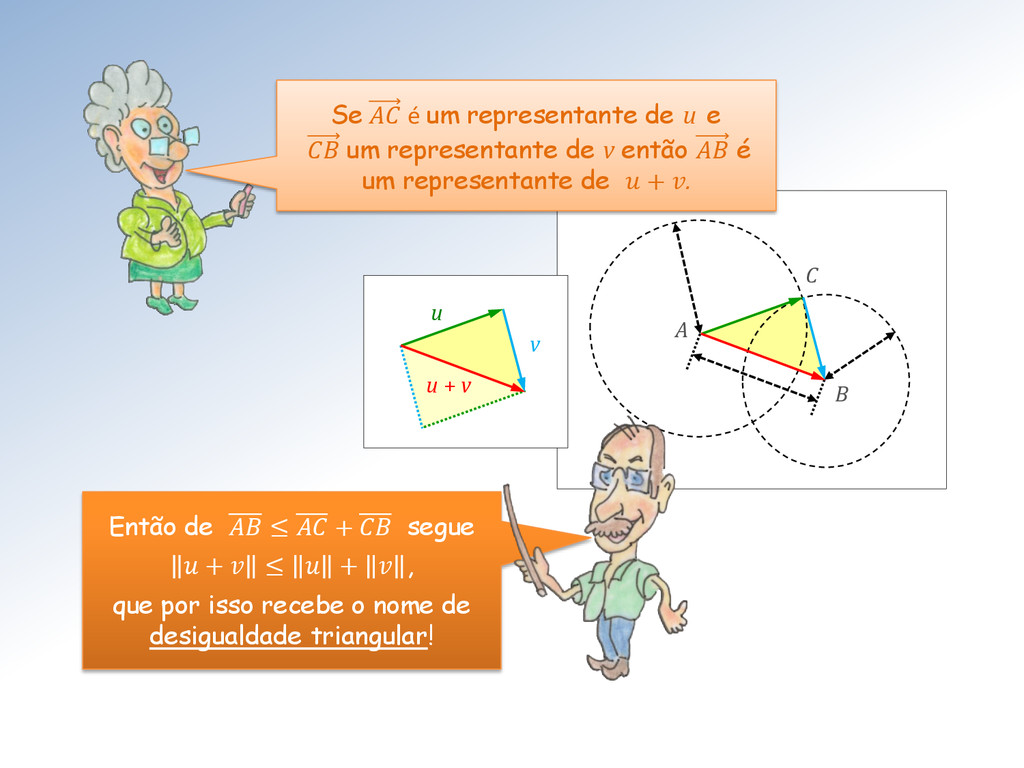
≤ + segue + ≤ + , que por isso recebe o nome de desigualdade triangular! Se é um representante de u e um representante de v então é um representante de + .
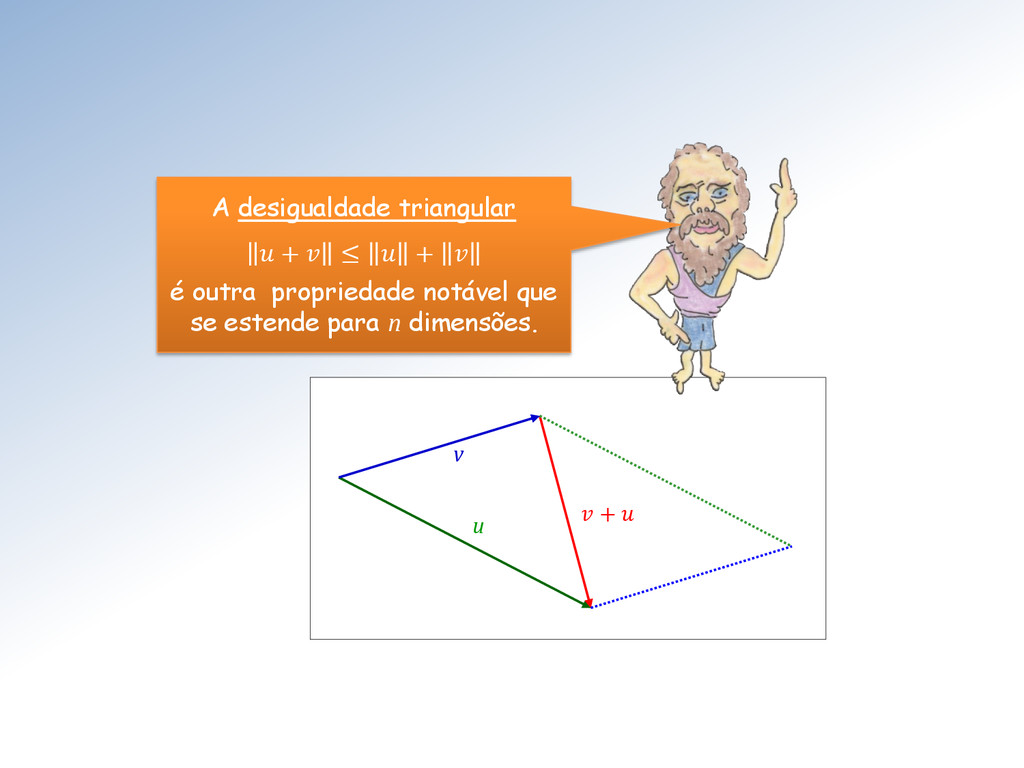
vetores de n dimensões. Mestre, no espaço euclidiano ainda dá para usar régua e compasso. Mas em n dimensões, como faço? Pois é meu jovem, esse é o desafio!
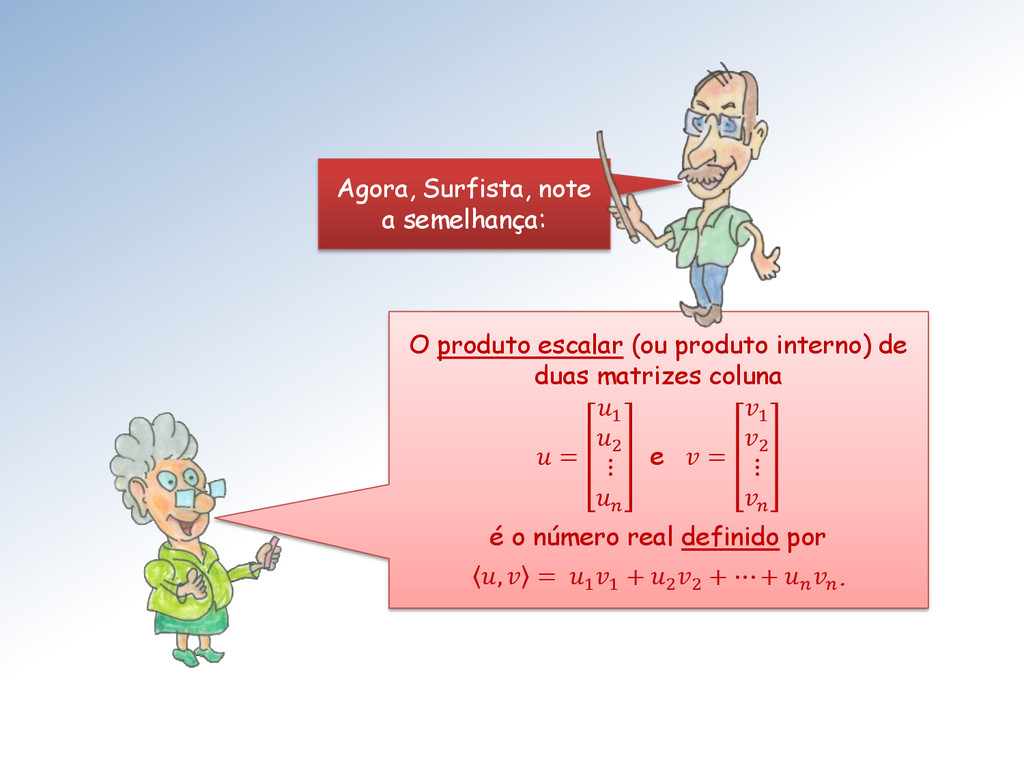
] por uma matriz coluna = 1 2 ⋮ nessa ordem, é o número real definido por , = 1 1 + 2 2 + ⋯ + . Loirinha, esta é uma operação entre matrizes linha e coluna de ordem n:
+ . é um “bracket”: Esta é uma terminologia muito usada em Mecânica Quântica. Físicos falam em “bra’s” e “ket’s”: • Um bra: | = [1 2 ⋯ ] • Um ket: | = 1 2 ⋮
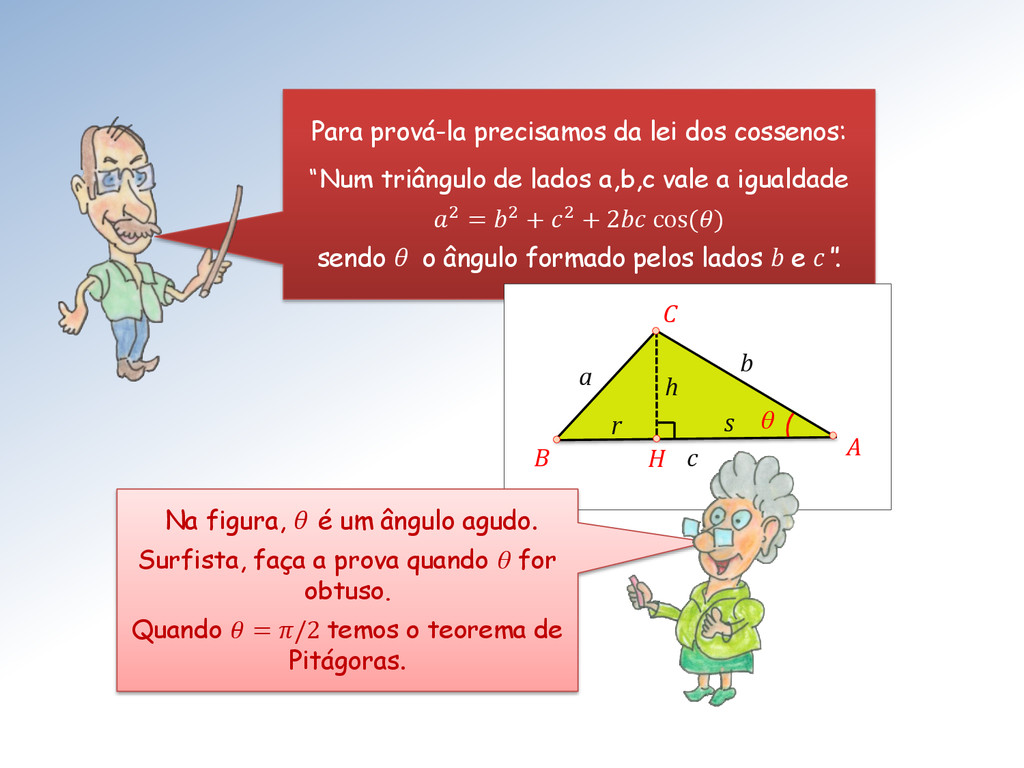
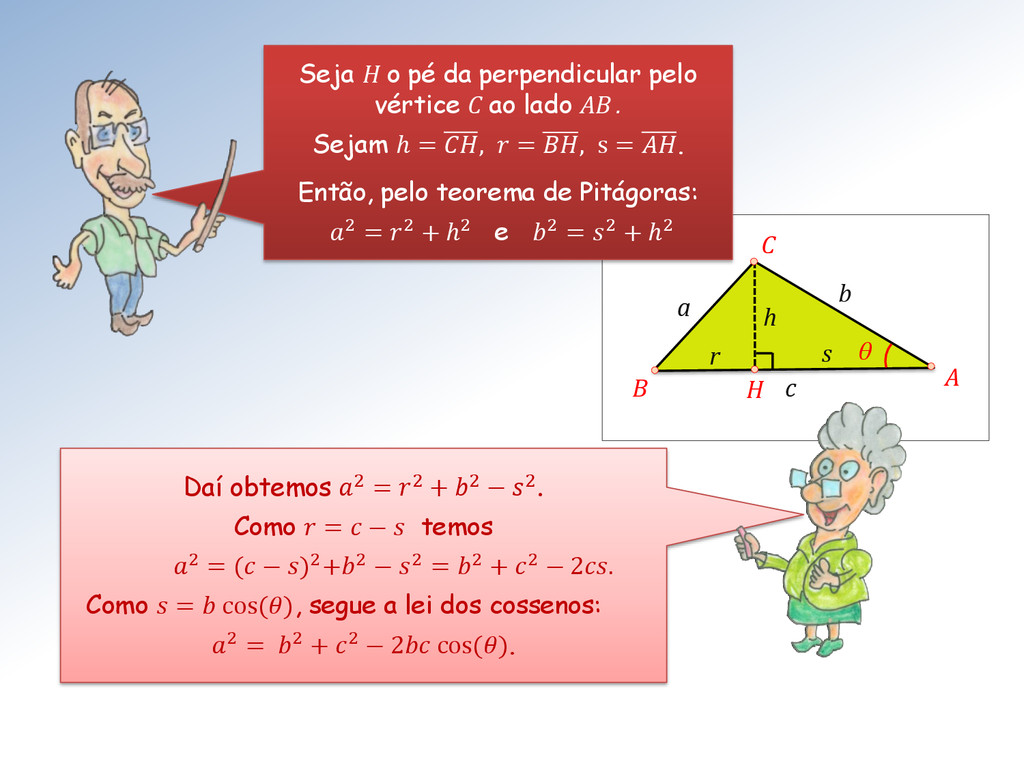
lados a,b,c vale a igualdade 2 = 2 + 2 + 2 cos() sendo θ o ângulo formado pelos lados b e c“. a b c θ A B C H s r h Na figura, θ é um ângulo agudo. Surfista, faça a prova quando θ for obtuso. Quando = /2 temos o teorema de Pitágoras.
h Seja H o pé da perpendicular pelo vértice C ao lado AB . Sejam ℎ = , = , s = . Então, pelo teorema de Pitágoras: 2 = 2 + ℎ2 e 2 = 2 + ℎ2 Daí obtemos 2 = 2 + 2 − 2. Como = − temos 2 = ( − )2+2 − 2 = 2 + 2 − 2. Como = cos(), segue a lei dos cossenos: 2 = 2 + 2 − 2 cos().
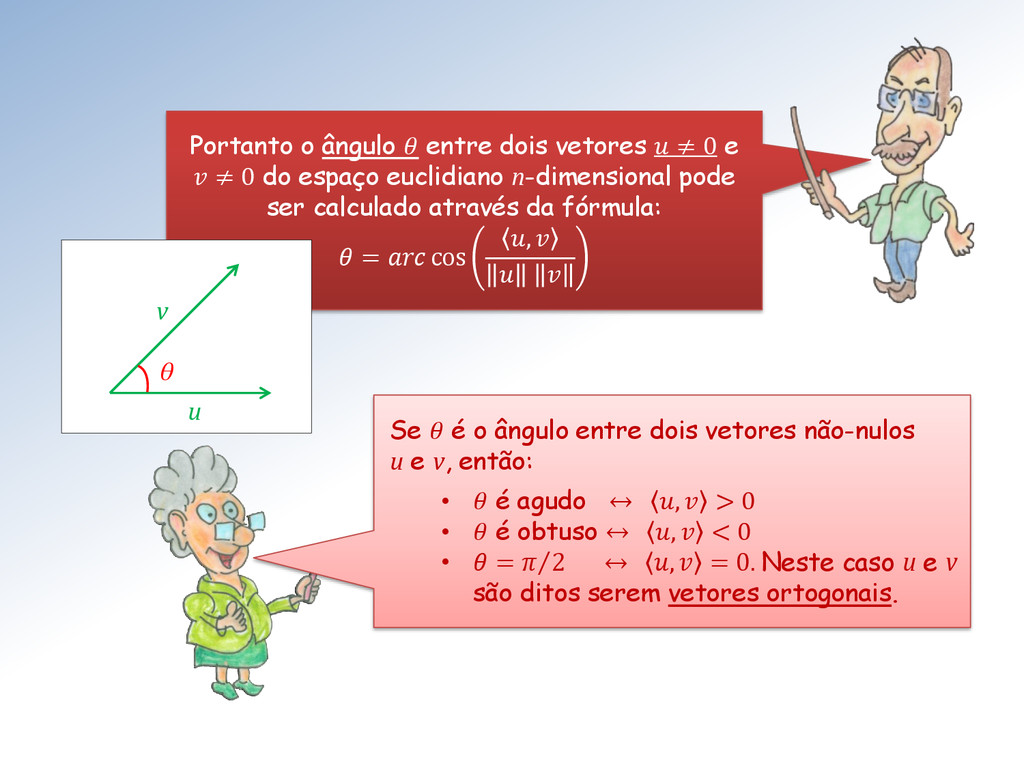
0 do espaço euclidiano n-dimensional pode ser calculado através da fórmula: = cos , Se é o ângulo entre dois vetores não-nulos u e v, então: • é agudo , > 0 • é obtuso , < 0 • = 2 , = 0. Neste caso u e v são ditos serem vetores ortogonais. θ v u
importantíssimo em álgebra linear, matemática e matemática aplicada. Projeções ortogonais são muito usadas por físicos e engenheiros para determinar a “componente de uma força” ou a “componente da velocidade” numa determinada direção.
a velocidade de queda dos corpos. A distância percorrida é proporcional ao quadrado do tempo: ∝ 2 Foi assim que ele provou que Aristóteles estava errado!
Ensaiador: “ A filosofia está escrita neste grande livro, o universo... Ele está escrito na linguagem da matemática e seus caracteres são triângulos, círculos e outras figuras geométricas...”
mesmo é verdade para as matrizes triangular superior. Sim: • A soma de matrizes triangular inferior é uma matriz triangular inferior. • A múltipla de uma matriz triangular inferior não deixa de ser triangular inferior.
vetorial V, o conjunto constituído por todas as combinações lineares dos vetores de X é um subespaço de V. Ele é chamado de subespaço gerado por X. O subespaço gerado por X pode ser o próprio V.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![As funções contínuas em [0, 1] constituem um subespaço de](https://files.speakerdeck.com/presentations/be510a4810154f409af0c0f7f2a50a03/slide_74.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}