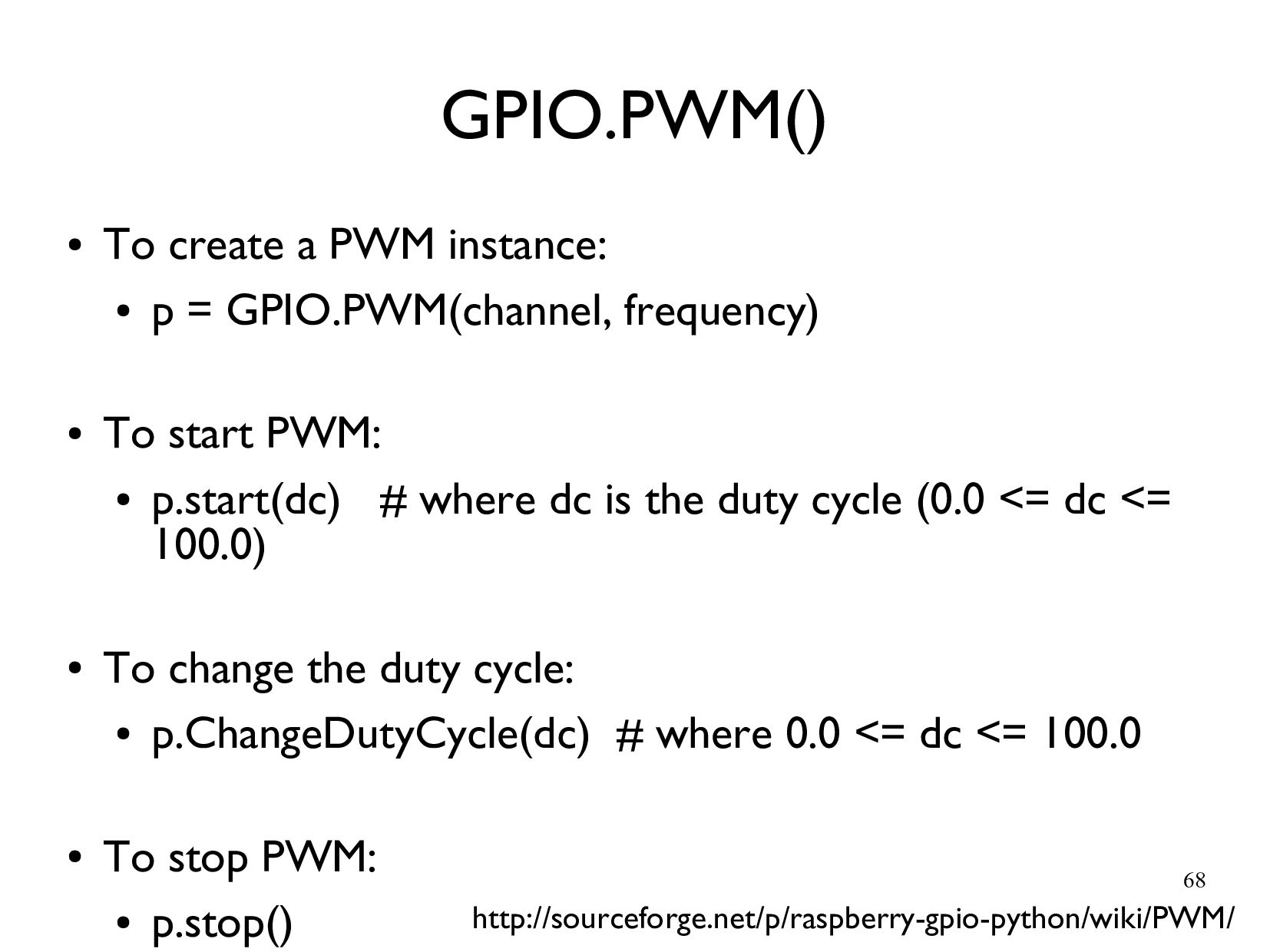
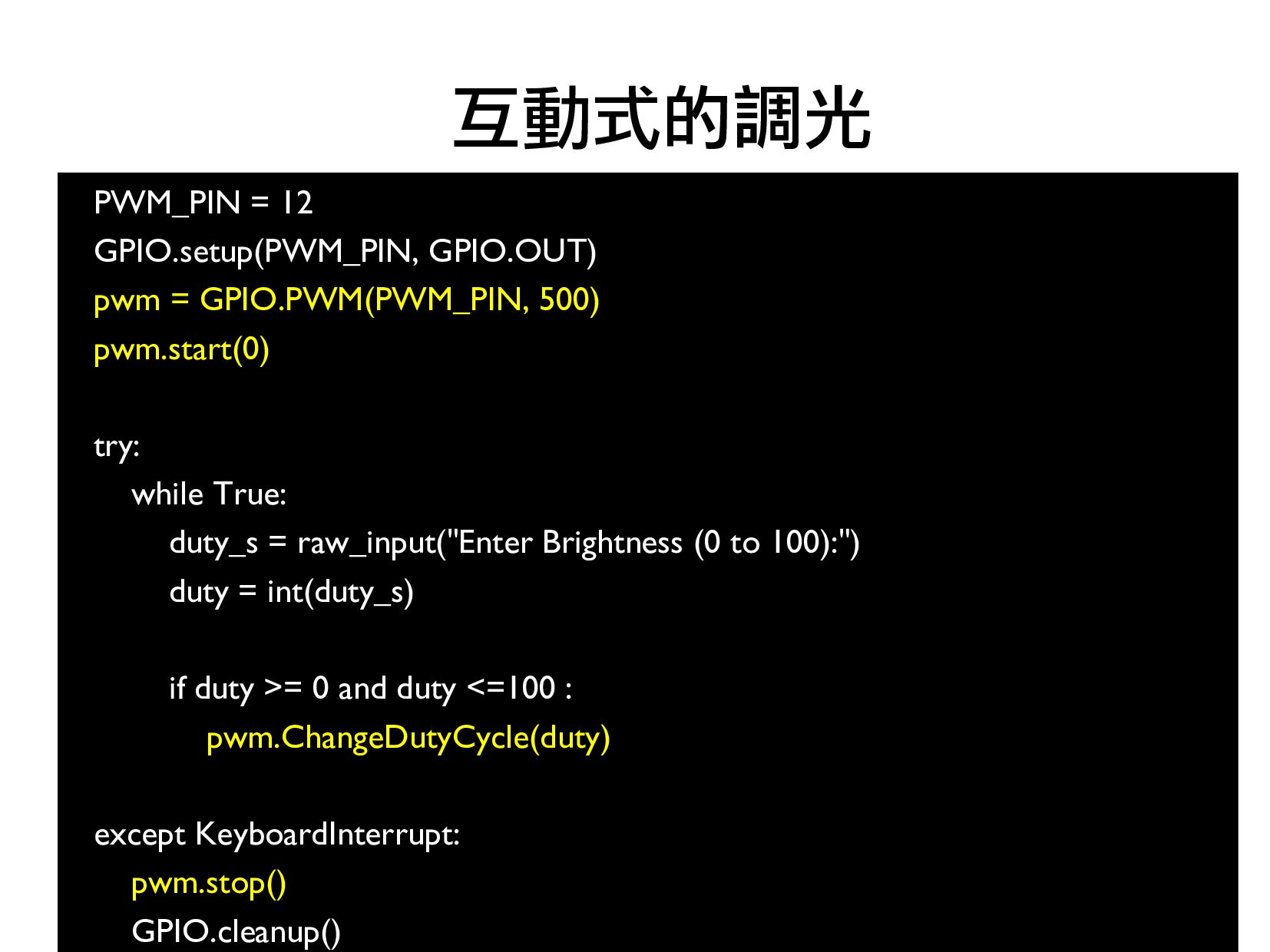
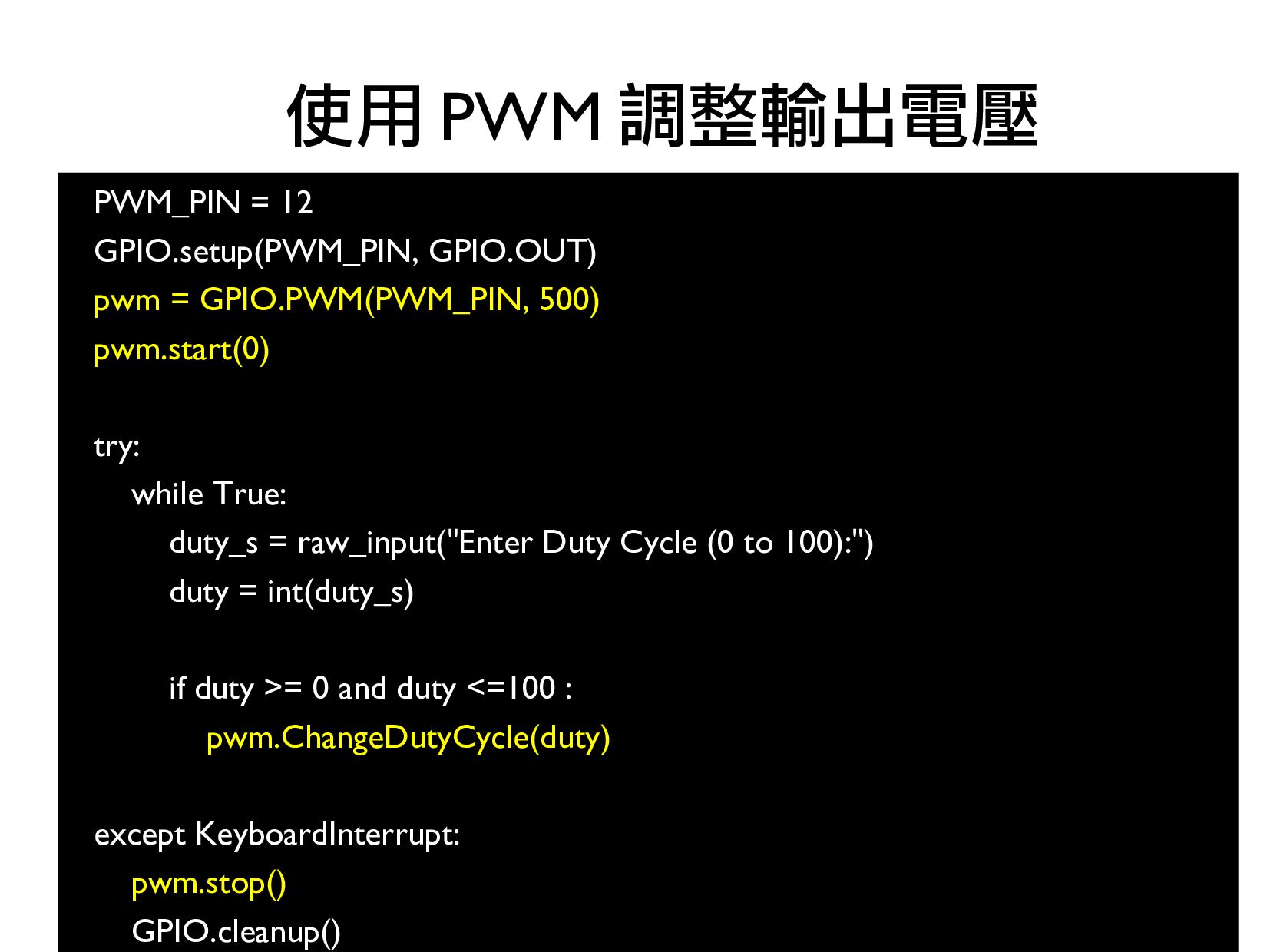
GPIO.PWM(channel, frequency) • To start PWM: • p.start(dc) # where dc is the duty cycle (0.0 <= dc <= 100.0) • To change the duty cycle: • p.ChangeDutyCycle(dc) # where 0.0 <= dc <= 100.0 • To stop PWM: • p.stop() GPIO.PWM() http://sourceforge.net/p/raspberry-gpio-python/wiki/PWM/
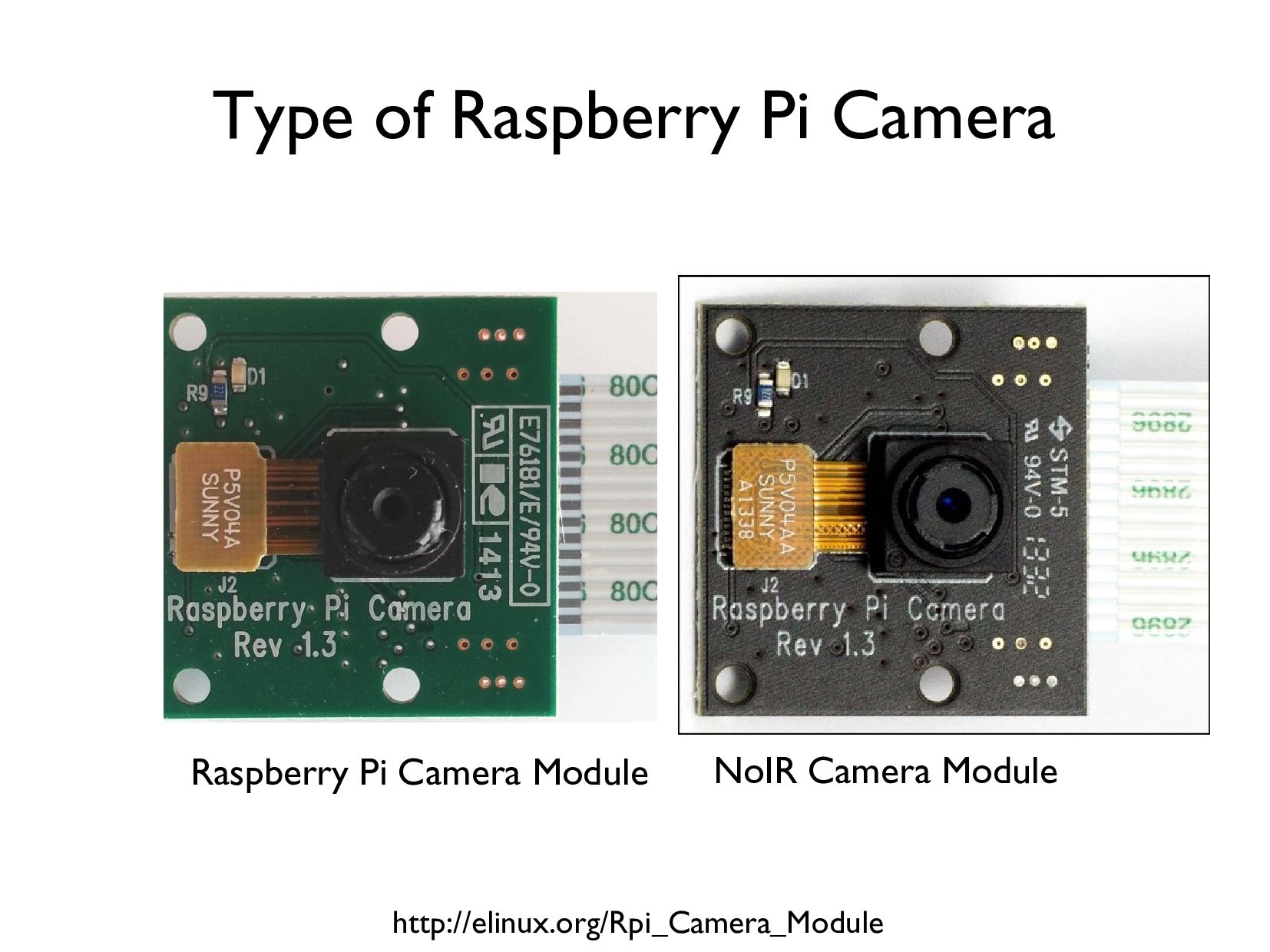
2592 x 1944 pixel • Pixel Size: 1.4 x 1.4 µm • Lens: f=3.6 mm, f/2.9 • Angle of View: 54 x 41 degrees • Field of View: 2.0 x 1.33 m at 2 m • Fixed Focus: 1m • 動態攝影最高解析度: 1080p@30 FPS with H.264/AVC 技術規格
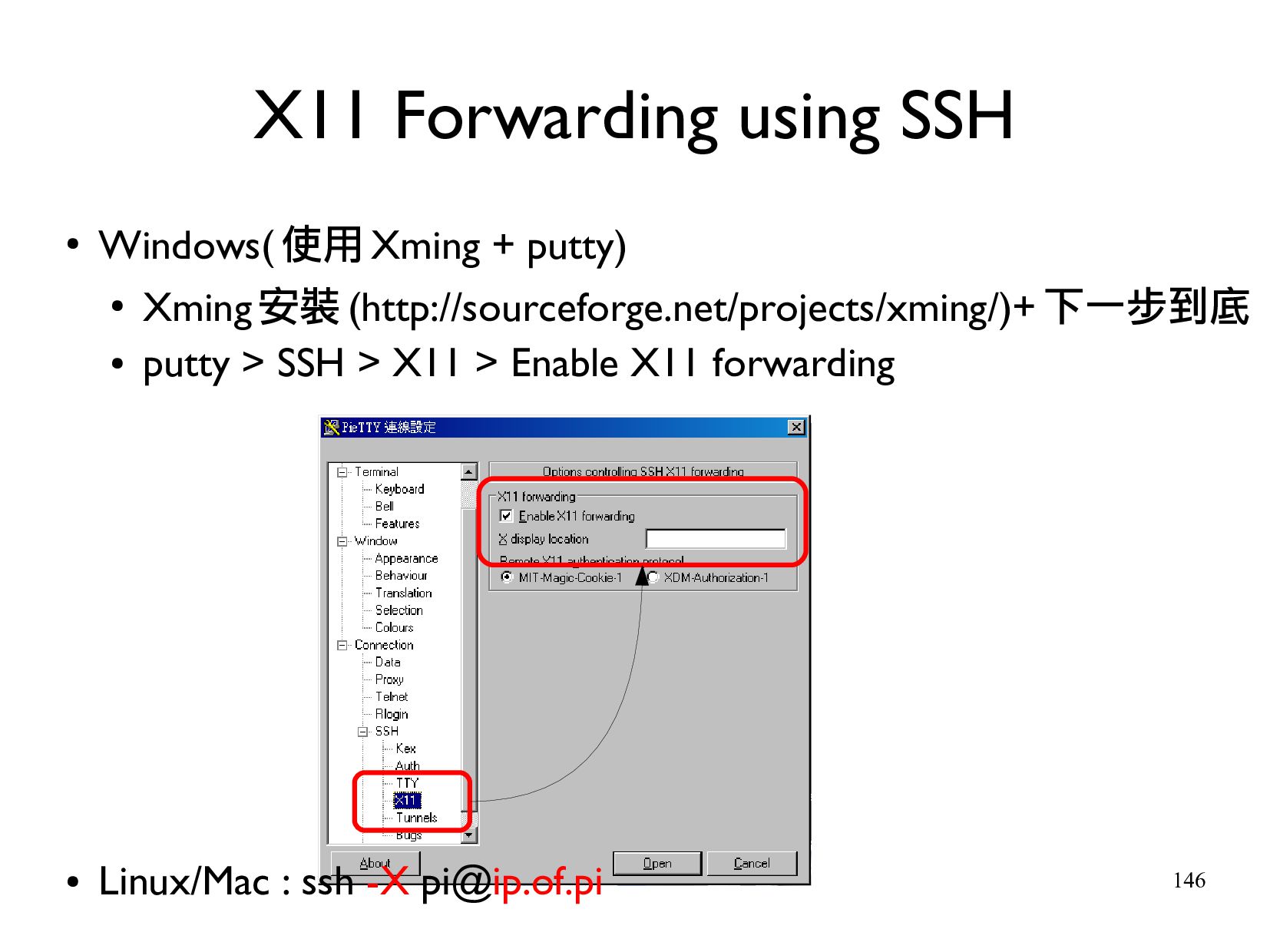
no 把它改成 yes 並且把註解拿掉 • 第二步:下載安裝 XQuartz 並重開機 http://xquartz.macosforge.org/landing/ • 感謝 Dami 和 YUN-TAO CHEN 的貢獻 “Can not open display” on Mac https://hackpad.com/X11-Forwarding-FcyKHioKxmW
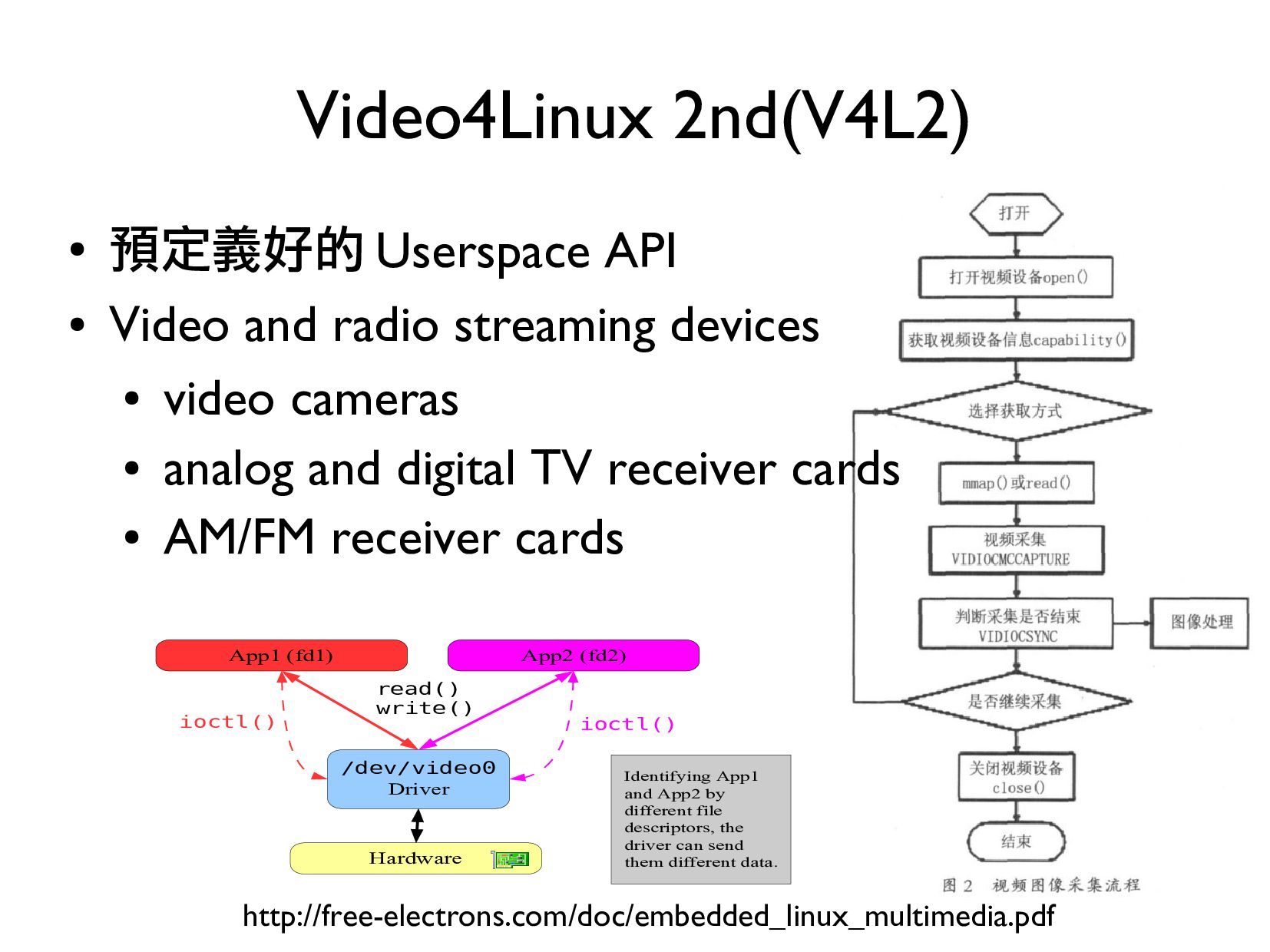
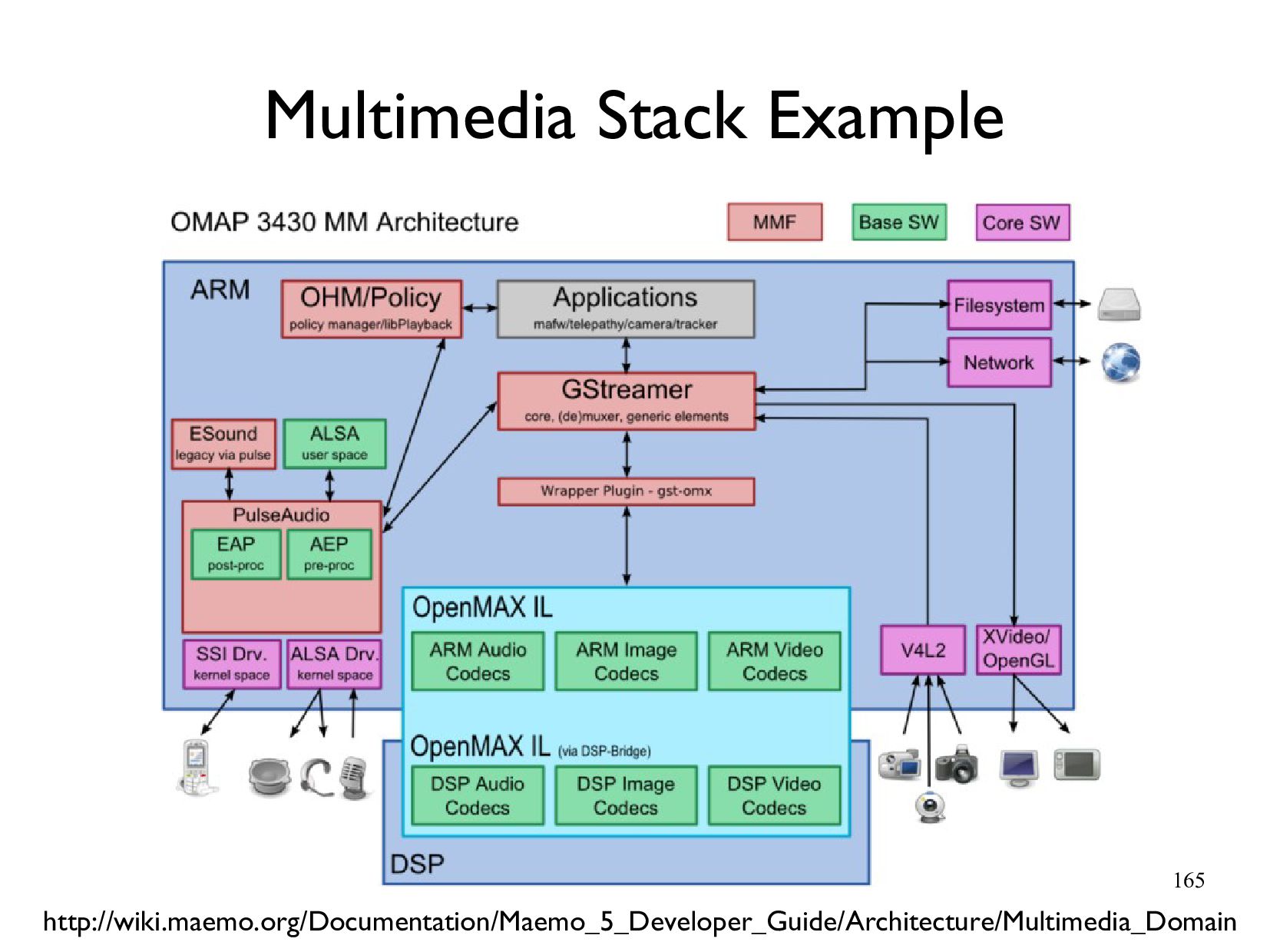
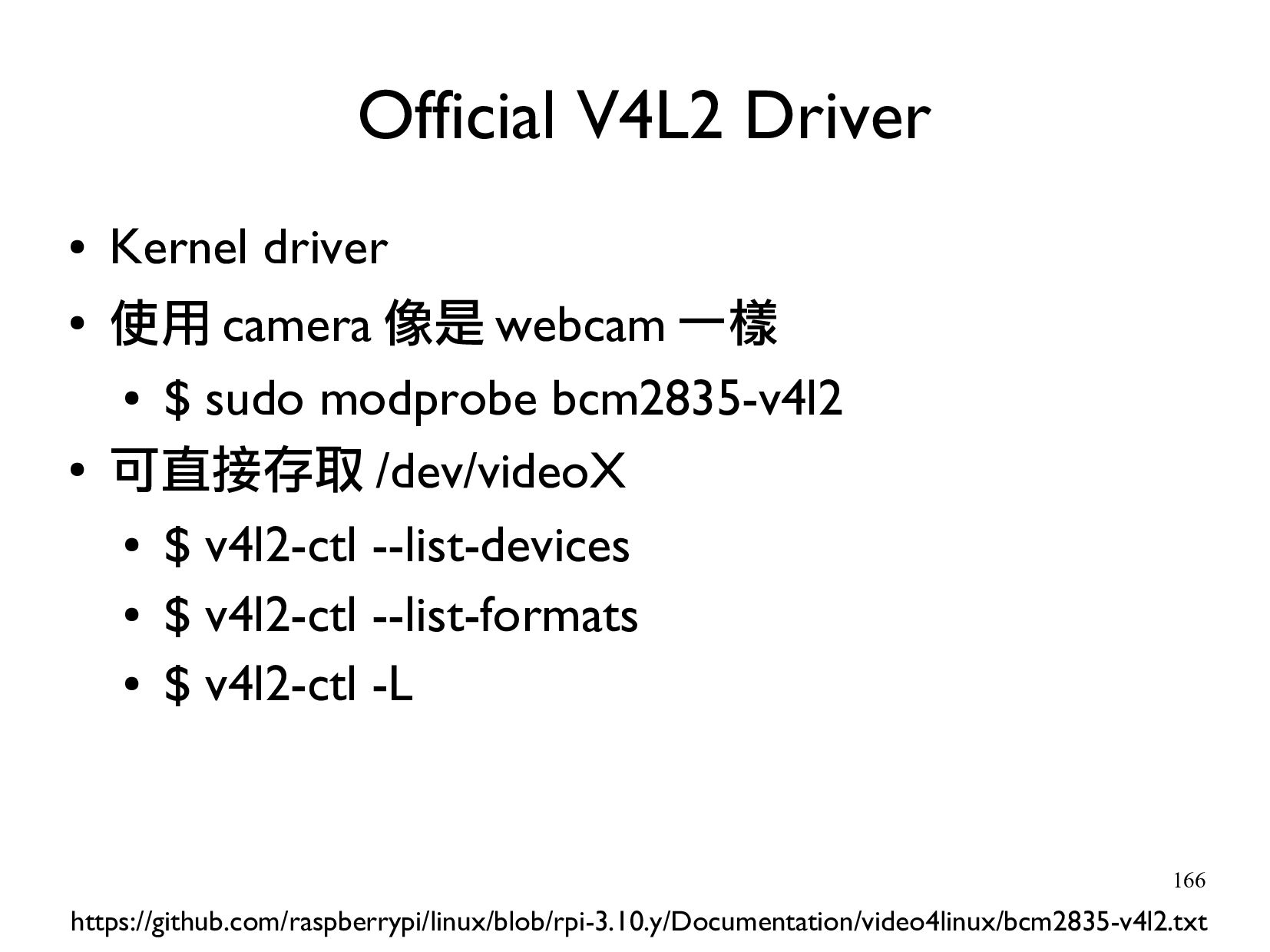
• video cameras • analog and digital TV receiver cards • AM/FM receiver cards Video4Linux 2nd(V4L2) http://free-electrons.com/doc/embedded_linux_multimedia.pdf /dev/video0 Driver Hardware App1 (fd1) App2 (fd2) ioctl() ioctl() read() write() Identifying App1 and App2 by different file descriptors, the driver can send them different data.
![Raspberry Pi 工作坊 - 寵物小車 台灣樹莓派 <[email protected]> Sep 03, 2016@MakerConf](https://files.speakerdeck.com/presentations/803e7432be744cf1a219b7be2d8f55bc/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![import cv2 • import sys • imagePath = sys.argv[1] image](https://files.speakerdeck.com/presentations/803e7432be744cf1a219b7be2d8f55bc/slide_153.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
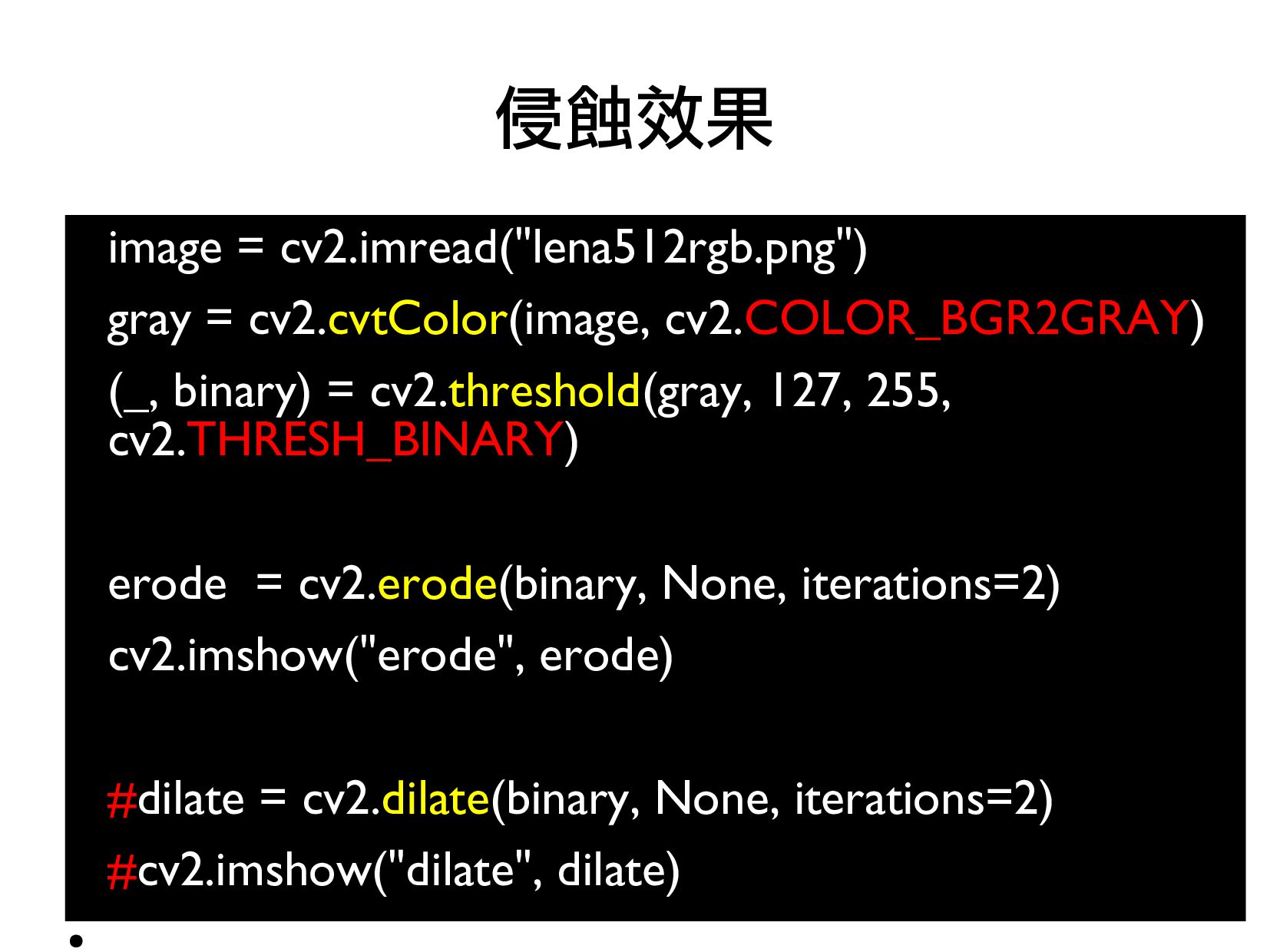
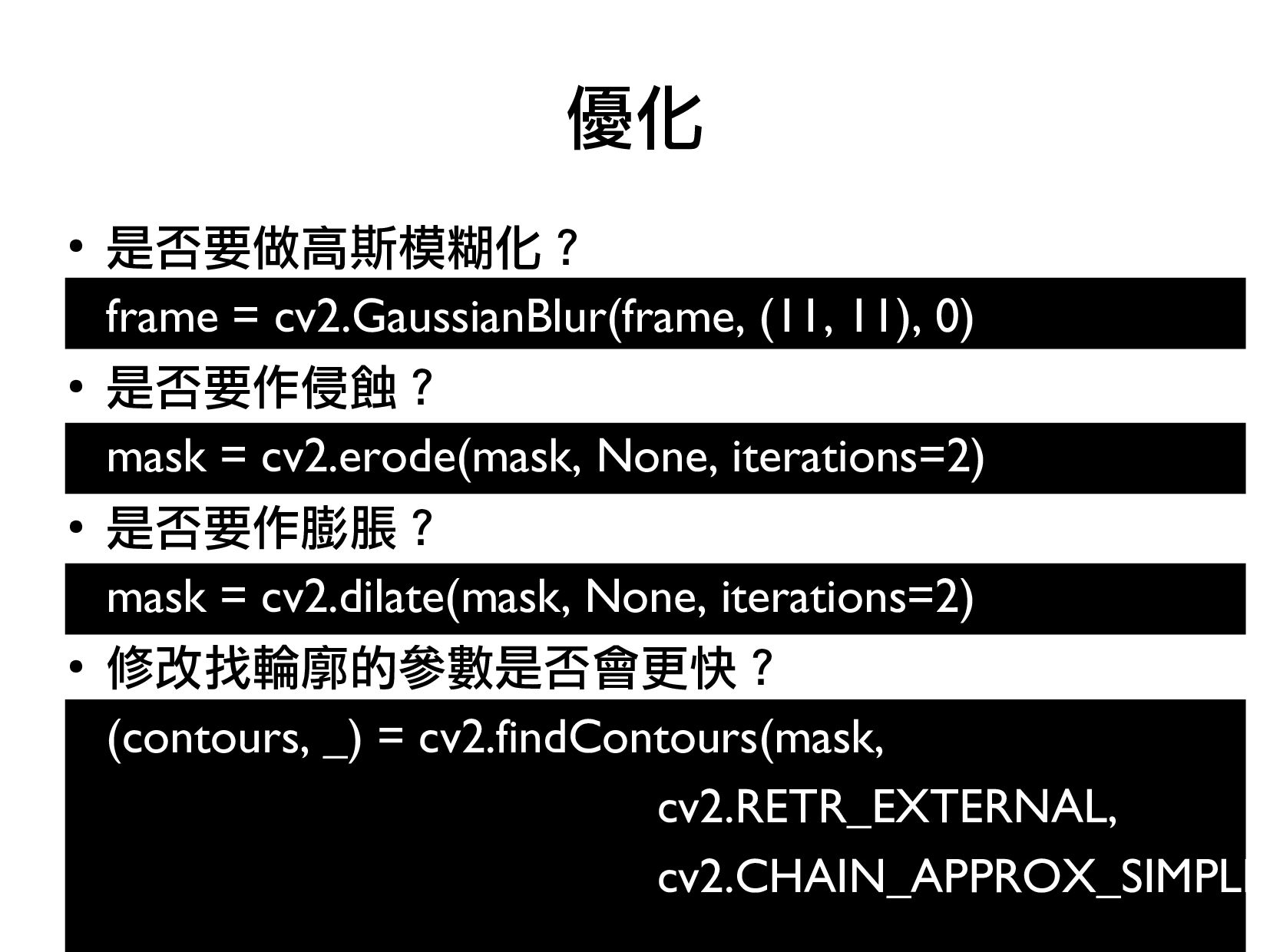
![• cv2.erode(src, kernel[, iterations]) • iterations – number of times](https://files.speakerdeck.com/presentations/803e7432be744cf1a219b7be2d8f55bc/slide_200.jpg){kind=link}
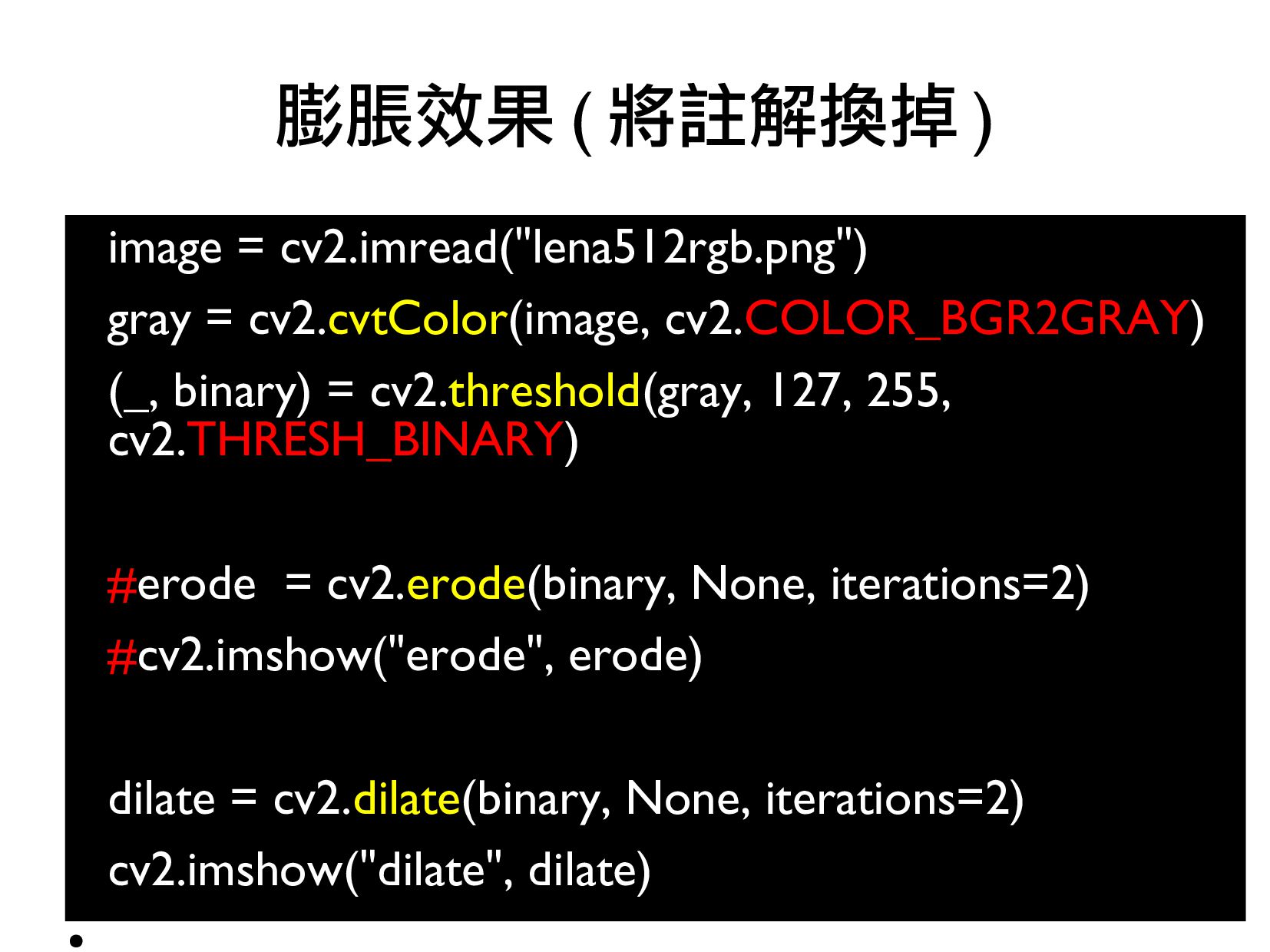
![• cv2.dilate(src, kerne[, iterations]) • iterations – number of times](https://files.speakerdeck.com/presentations/803e7432be744cf1a219b7be2d8f55bc/slide_201.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}