Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
機械学習による動作認識
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
OHNO
January 14, 2020
Research
780
0
Share
機械学習による動作認識
OHNO
January 14, 2020
More Decks by OHNO
See All by OHNO
自社データを生成AIに活用
planeta
0
100
生成系AIで自データを扱うには
planeta
0
230
外観検査の難しさ
planeta
0
540
儲かるPython
planeta
0
250
画像処理ライブラリOpenCVの使い方0910
planeta
0
1.5k
Pythonによる工業用カメラ画像取得事例
planeta
0
1.5k
画像処理ライブラリOpenCVの使い方
planeta
0
1.1k
SONYのNNC
planeta
0
630
画像類似度計算
planeta
0
2.1k
Other Decks in Research
See All in Research
Cross-Media Information Spaces and Architectures
signer
PRO
0
290
2026年3月1日(日)福島「除染土」の公共利用をかんがえる
atsukomasano2026
0
620
業界横断 副業コンプライアンス調査 三者(副業者・本業先・発注者)におけるトラブル認知ギャップの構造分析
fkske
0
1.3k
老舗ものづくり企業でリサーチが変革を起こすまで - 三菱重工DXの実践
skydats
0
170
「AIとWhyを深堀る」をAIと深堀る
iflection
0
460
[チュートリアル] 電波マップ構築入門 :研究動向と課題設定の勘所
k_sato
0
460
Collective Predictive Coding and World Models in LLMs: A System 0/1/2/3 Perspective on Hierarchical Physical AI (IEEE SII 2026 Plenary Talk)
tanichu
1
410
Sequences of Logits Reveal the Low Rank Structure of Language Models
sansantech
PRO
1
260
社内データ分析AIエージェントを できるだけ使いやすくする工夫
fufufukakaka
1
1.1k
都市交通マスタープランとその後への期待@熊本商工会議所・熊本経済同友会
trafficbrain
0
220
台湾モデルに学ぶ詐欺広告対策:市民参加の必要性
dd2030
0
340
英語教育 “研究” のあり方:学術知とアウトリーチの緊張関係
terasawat
1
970
Featured
See All Featured
DBのスキルで生き残る技術 - AI時代におけるテーブル設計の勘所
soudai
PRO
65
55k
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
360
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
150
Max Prin - Stacking Signals: How International SEO Comes Together (And Falls Apart)
techseoconnect
PRO
0
170
First, design no harm
axbom
PRO
2
1.2k
Bash Introduction
62gerente
615
210k
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.7k
So, you think you're a good person
axbom
PRO
2
2k
Avoiding the “Bad Training, Faster” Trap in the Age of AI
tmiket
0
170
Balancing Empowerment & Direction
lara
6
1.1k
The Language of Interfaces
destraynor
162
27k
Leveraging Curiosity to Care for An Aging Population
cassininazir
1
260
Transcript
機械学習による動作認識 大野 宏 2020/1/11 Python機械学習勉強会in新潟Restart#10
本日の内容 ・動作認識の概要 ・センサを使った姿勢データの取得 ・ディープラーニングを使った姿勢推定 ・作業者の解析 ・主成分分析を使った動作認識
動作の取得や認識・解析の目的 ・CGキャラクター用データの取得 ・スポーツ選手やベテラン技術者の動きの違いの把握 ・作業者の解析 ・個人の特定 ・不審な動きの判別
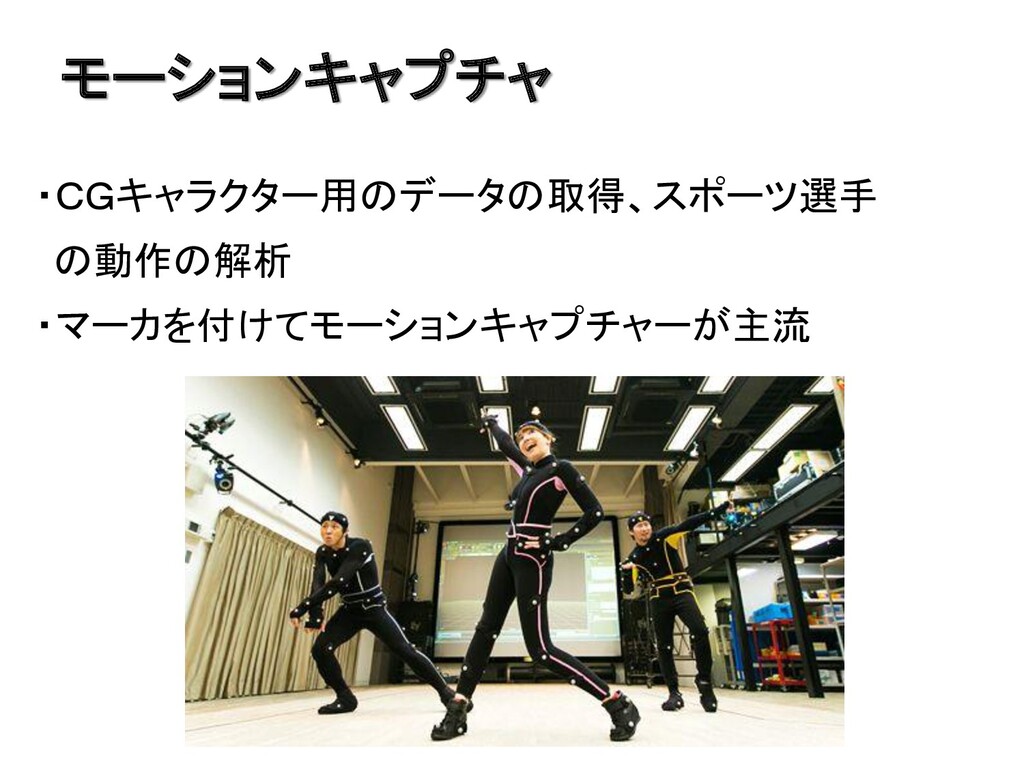
モーションキャプチャ ・CGキャラクター用のデータの取得、スポーツ選手 の動作の解析 ・マーカを付けてモーションキャプチャーが主流
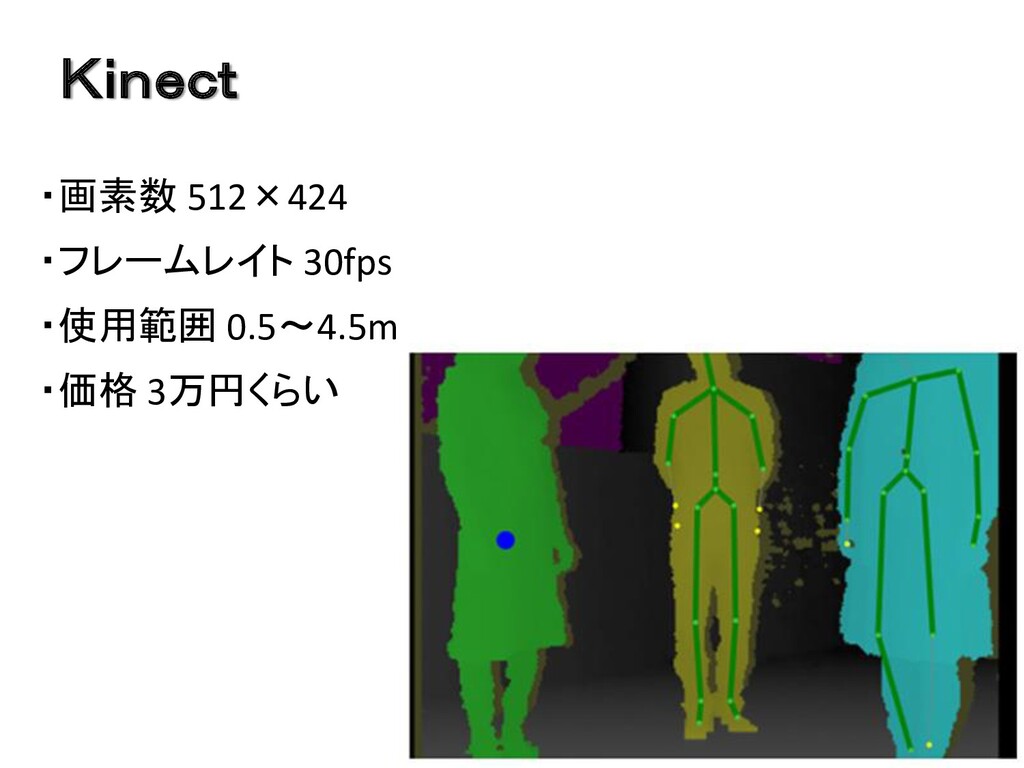
3次元センサKinect ・マイクロソフトがゲーム用のジェスチャー認識する入力 装置として開発 ・スケルトン(関節点)の3次元座標を取得できる ・工業用の3次元センサもあったが高価、Kinectは 約3万 円で(価格は1/10以下)、VGAと高解像度 ・パソコンで使えるSDKが提供され、多くの大学が研究 に利用 ・現在は製造中止、アマゾン購入可
Kinect ・画素数 512×424 ・フレームレイト 30fps ・使用範囲 0.5~4.5m ・価格 3万円くらい
Kinectの利用事例 ・ウルトラセブン https://www.youtube.com/watch?v=eCbURRDUUdI&t=46s ・かめはめ波 https://www.youtube.com/watch?v=r0l18SWKd88
安価な距離画像センサ Intel社 デプスカメラ ・画素数 1280×720 ・フレームレイト 90fps ・使用範囲 0.2~10m ・価格
3万円くらい ・大きさ 90 mm x 25 mm x 25 mm
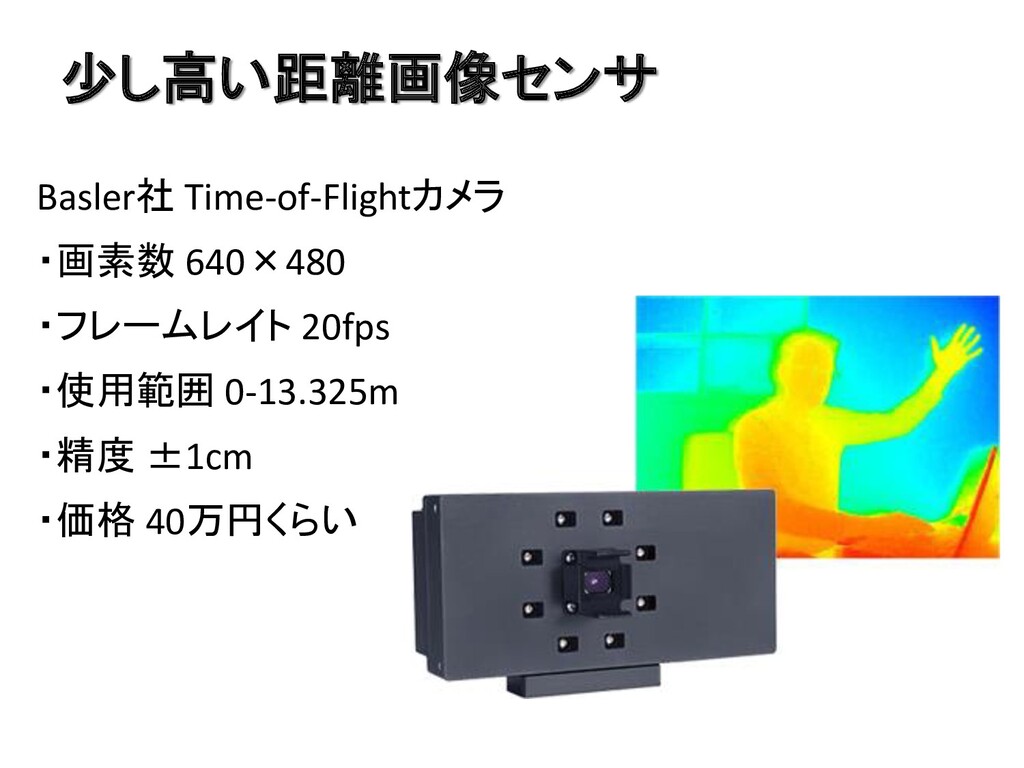
少し高い距離画像センサ Basler社 Time-of-Flightカメラ ・画素数 640×480 ・フレームレイト 20fps ・使用範囲 0-13.325m ・精度
±1cm ・価格 40万円くらい
OpenPose ・2次元画像から姿勢を推定(関節点の2次元推定) https://qiita.com/nnn112358/items/121dc36c3c1752a00276
PoseNet https://guithub.com/tensorflow/tfjs-models/tree/master/posenet/
人体動作の認識方法 ・ディープラーニングで各関節角の値を取得 これらの値から別の機械学習方法を用いて動作を認識 各関節の動きを時系列データとしてRNNで認識 主成分分析で次元を圧縮して認識 ・3D-CNNで動画像のまま動作を認識 2D画像+1D時間 → 3D 3D
Resnet 学習に要する時間が長い
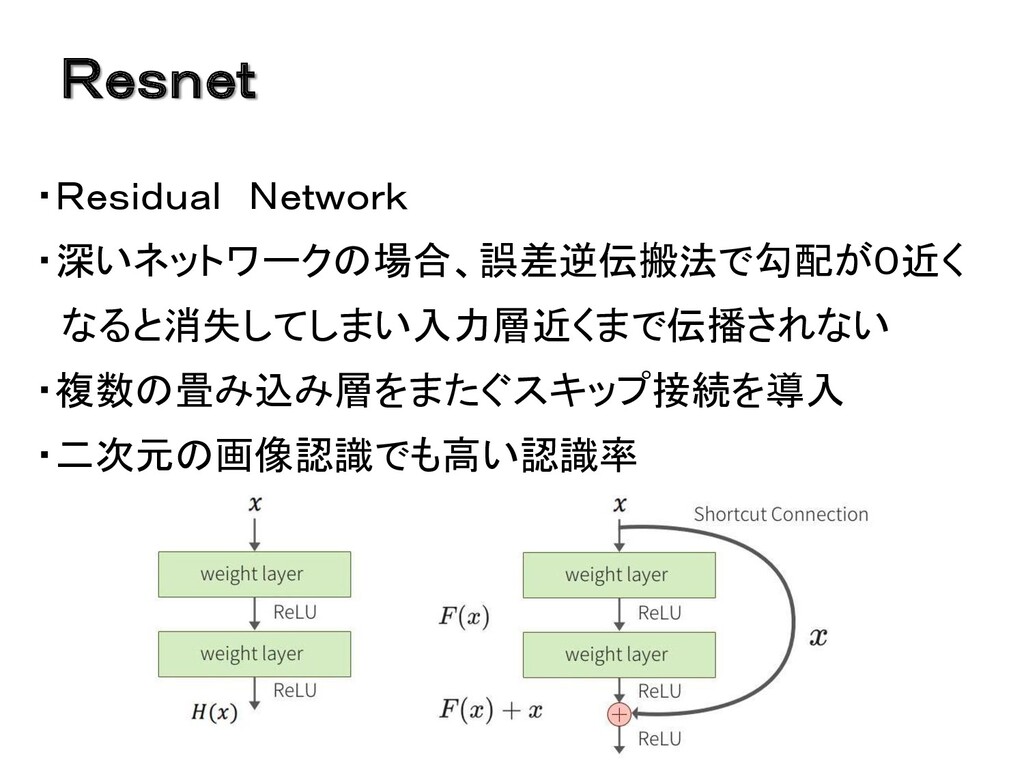
Resnet ・Residual Network ・深いネットワークの場合、誤差逆伝搬法で勾配が0近く なると消失してしまい入力層近くまで伝播されない ・複数の畳み込み層をまたぐスキップ接続を導入 ・二次元の画像認識でも高い認識率
Kinectを使った動作認識 岐阜県情報技術研究所が開発
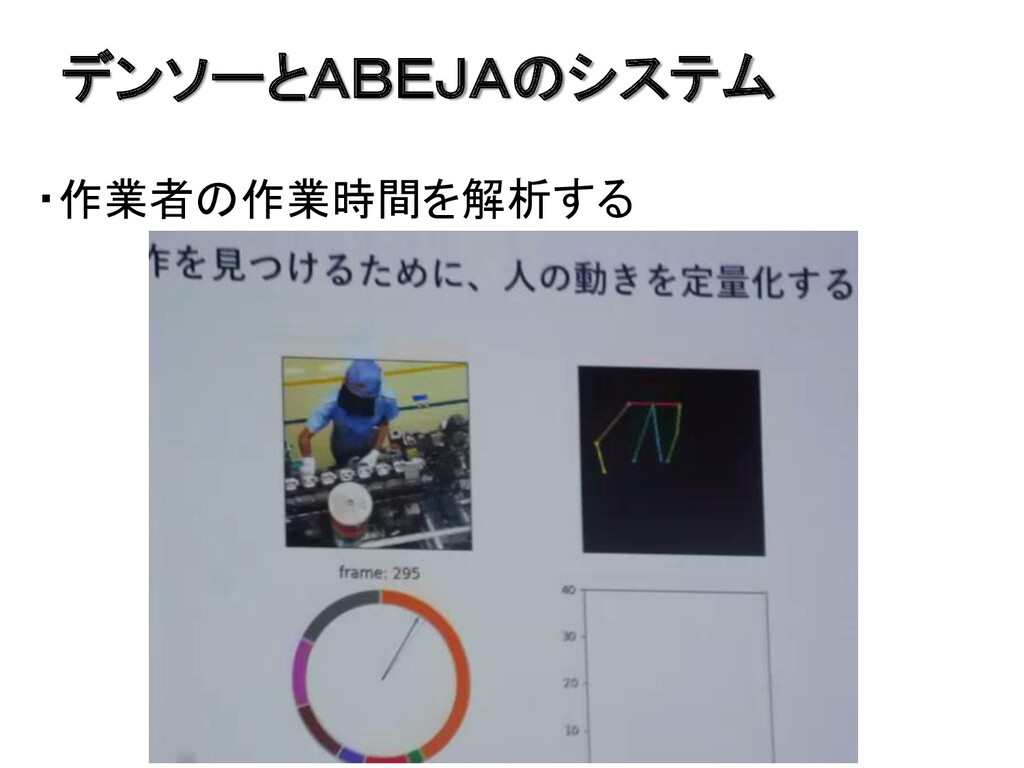
デンソーとABEJAのシステム ・作業者の作業時間を解析する
以前取り組んだ研究の紹介 ・「固有平面上での人体動作の認識に関する研究」 ・目的 製造現場の作業工程を改善するため、現状作業を分析 する動作認識技術の開発 従来はストップウォッチを片手に人が見て紙に記録 ・動作の対象はラジオ体操 ・International Conference on
Computer Visionで発表
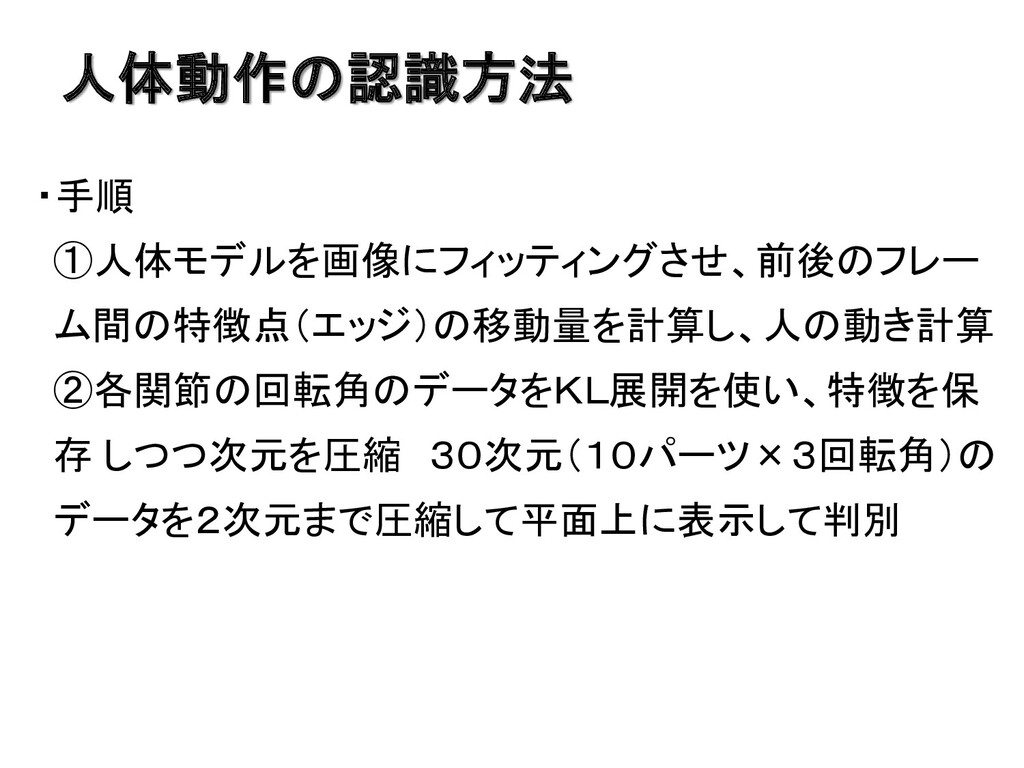
人体動作の認識方法 ・手順 ①人体モデルを画像にフィッティングさせ、前後のフレー ム間の特徴点(エッジ)の移動量を計算し、人の動き計算 ②各関節の回転角のデータをKL展開を使い、特徴を保 存 しつつ次元を圧縮 30次元(10パーツ×3回転角)の データを2次元まで圧縮して平面上に表示して判別
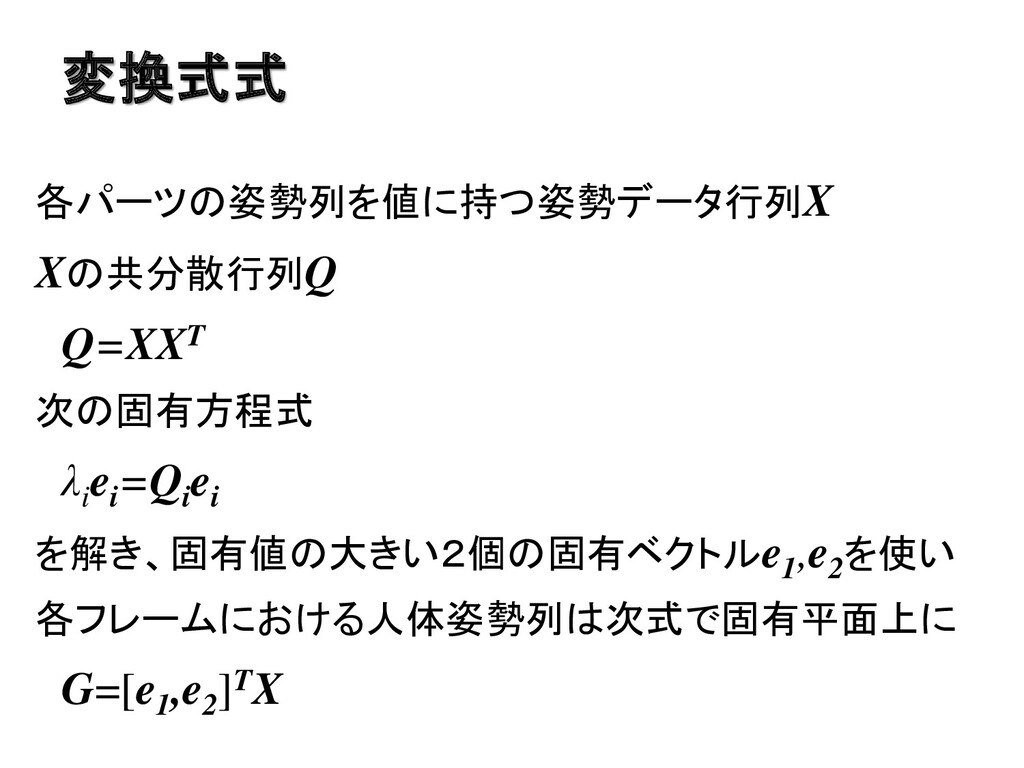
変換式式 各パーツの姿勢列を値に持つ姿勢データ行列X Xの共分散行列Q Q=XXT 次の固有方程式 λi ei =Qi ei を解き、固有値の大きい2個の固有ベクトルe1
,e2 を使い 各フレームにおける人体姿勢列は次式で固有平面上に G=[e1 ,e2 ]TX
動作の計測 4方向からのカメラで撮像して計測
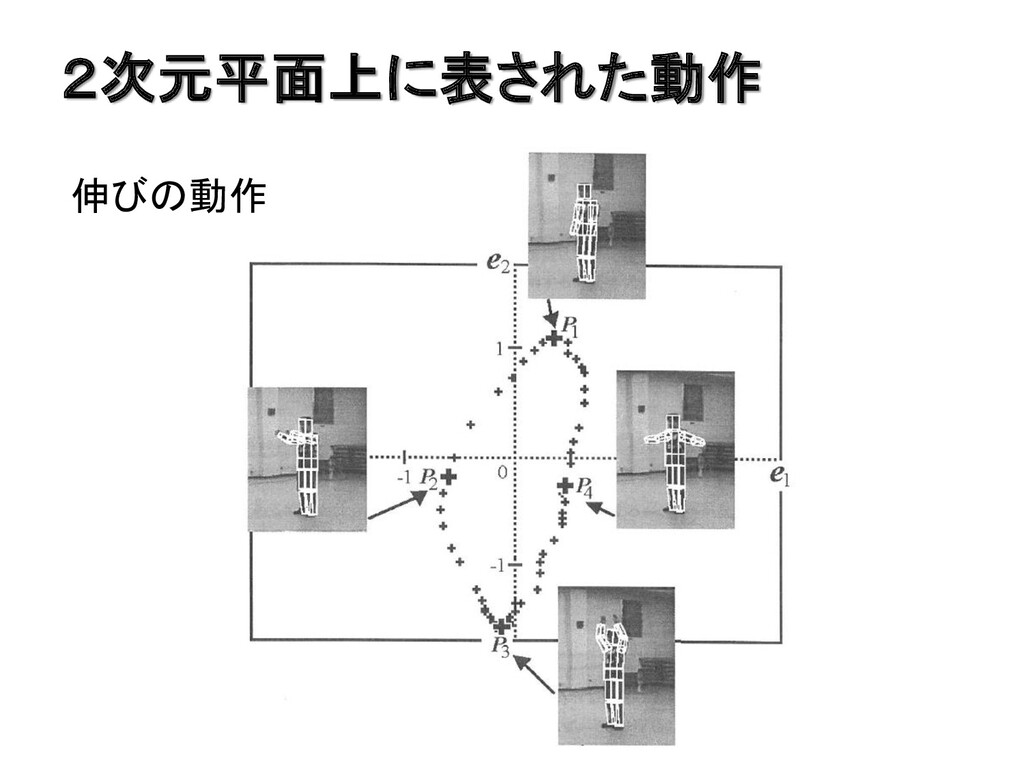
2次元平面上に表された動作 伸びの動作
9種類の動作 伸びの動作 腕を回す運動
8人の伸びの動作
ICCV1999
ギリシャのケルキラ(コルフ)島
まとめ ・動作認識の概要 ・センサを使った姿勢データの取得 ・ディープラーニングを使った姿勢推定 ・作業者の解析 姿勢データを取得して機械学習で認識 動画像の3D-CNNで認識 ・主成分分析を使った動作認識
お知らせ ・ディープラーニングによる画像処理入門 Tensorflow/Kerasを使いMNISTや自前画像の分類 ローカルPC、グーグルクラウドのGPU環境 1月23日、24日 長岡市NaDeC BASE https://nagaoka-ai-innovationhub.connpass.com/event/159388/ https://connpass.com/ 「長岡市」で検索
・画像処理の基礎 カメラと照明の基礎と選定 画像処理ライブラリOpenCVの使い方講習 3/4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}