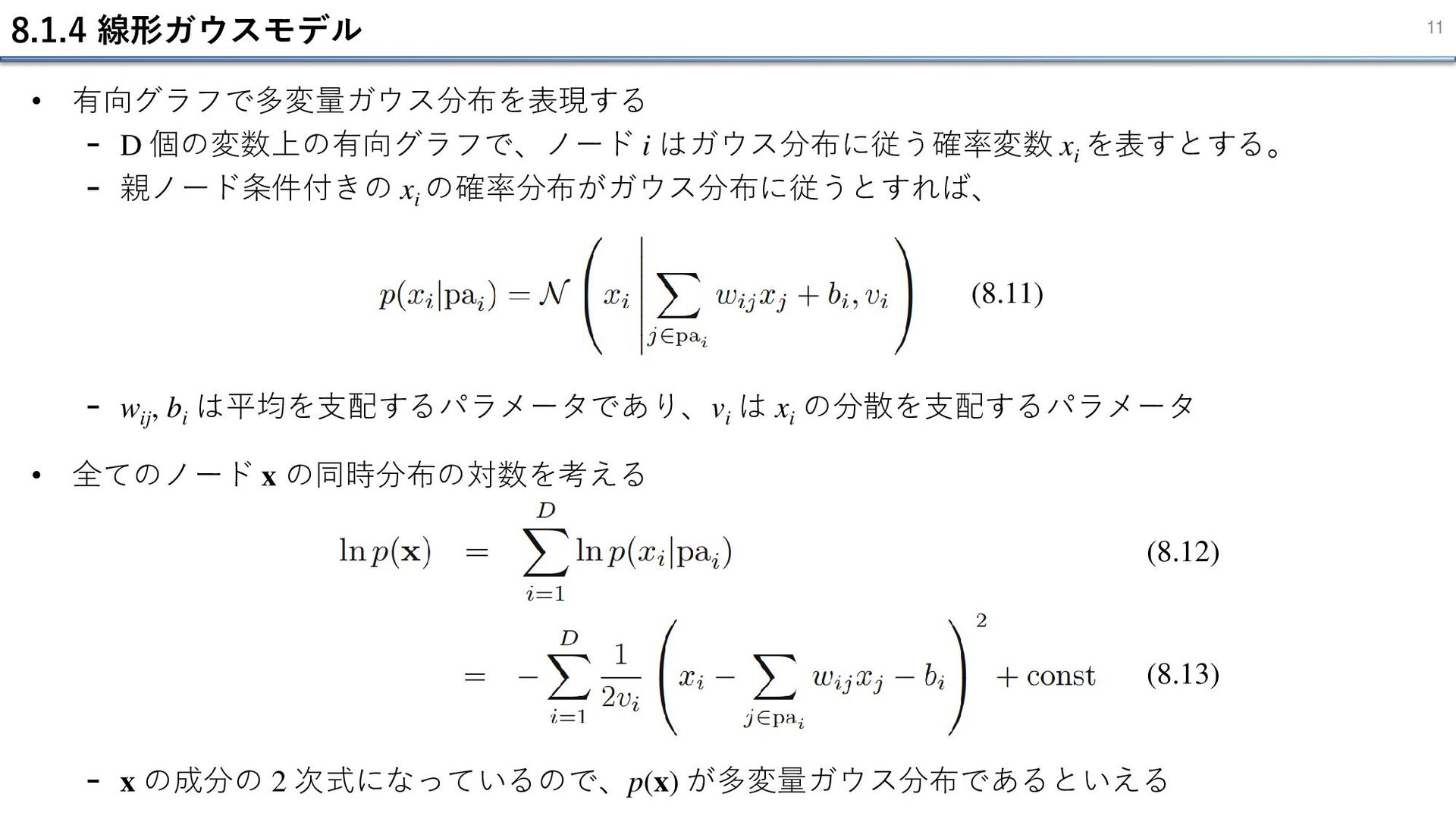
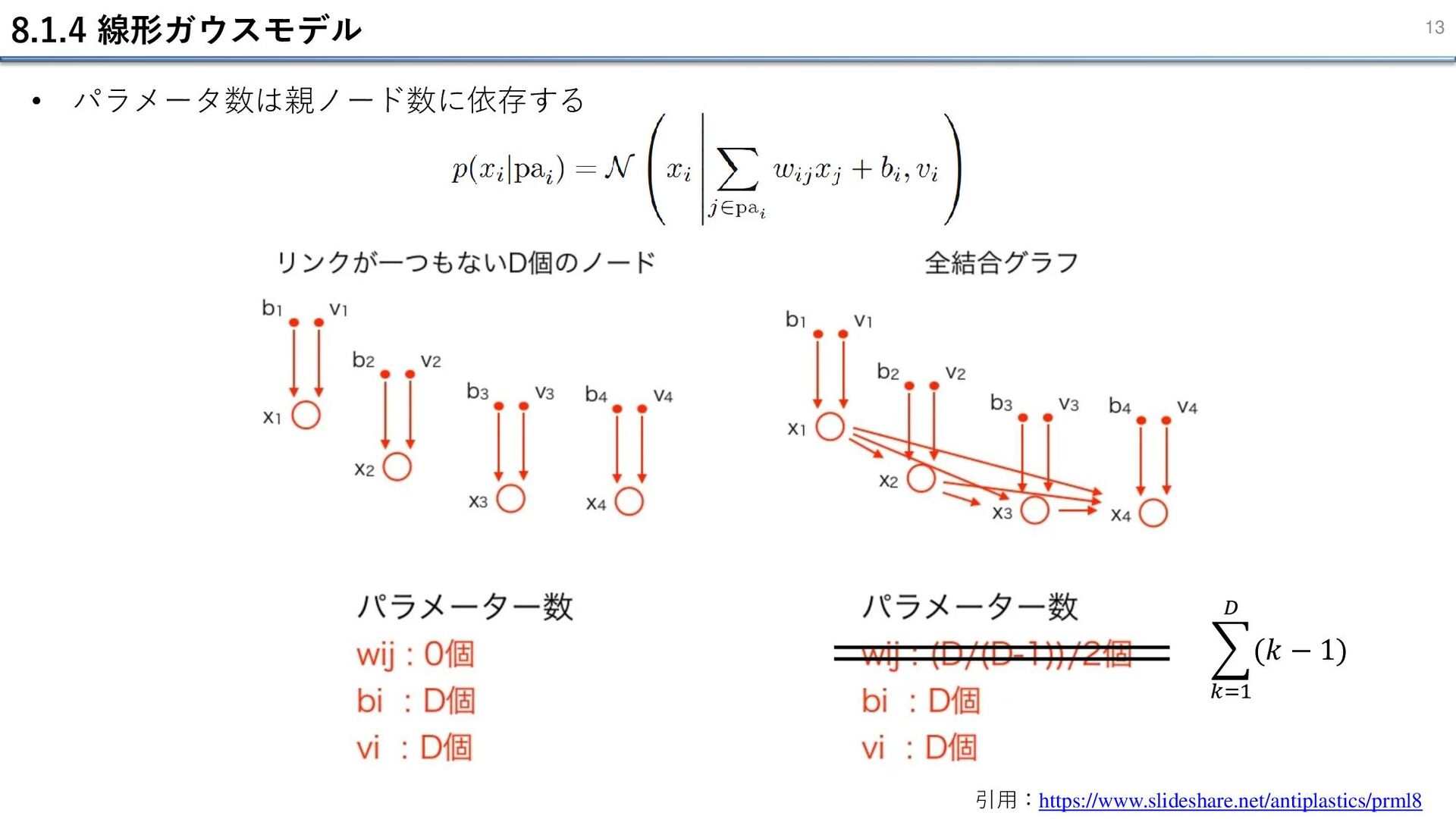
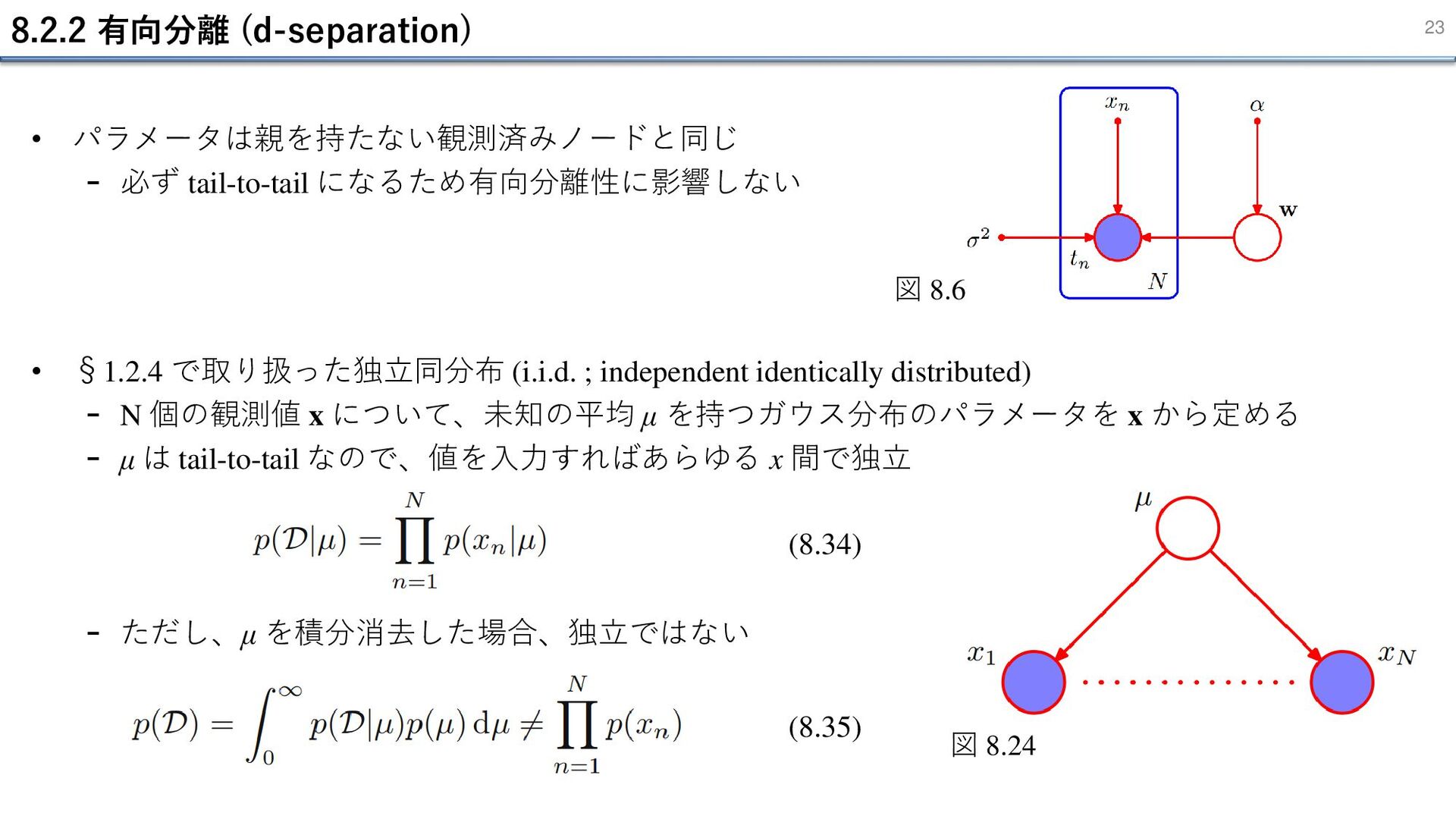
8.1.4 線形ガウスモデル 11 • 有向グラフで多変量ガウス分布を表現する - D 個の変数上の有向グラフで、ノード i はガウス分布に従う確率変数 xi を表すとする。 - 親ノード条件付きの xi の確率分布がガウス分布に従うとすれば、 - wij , bi は平均を支配するパラメータであり、vi は xi の分散を支配するパラメータ (8.11) (8.12) (8.13)
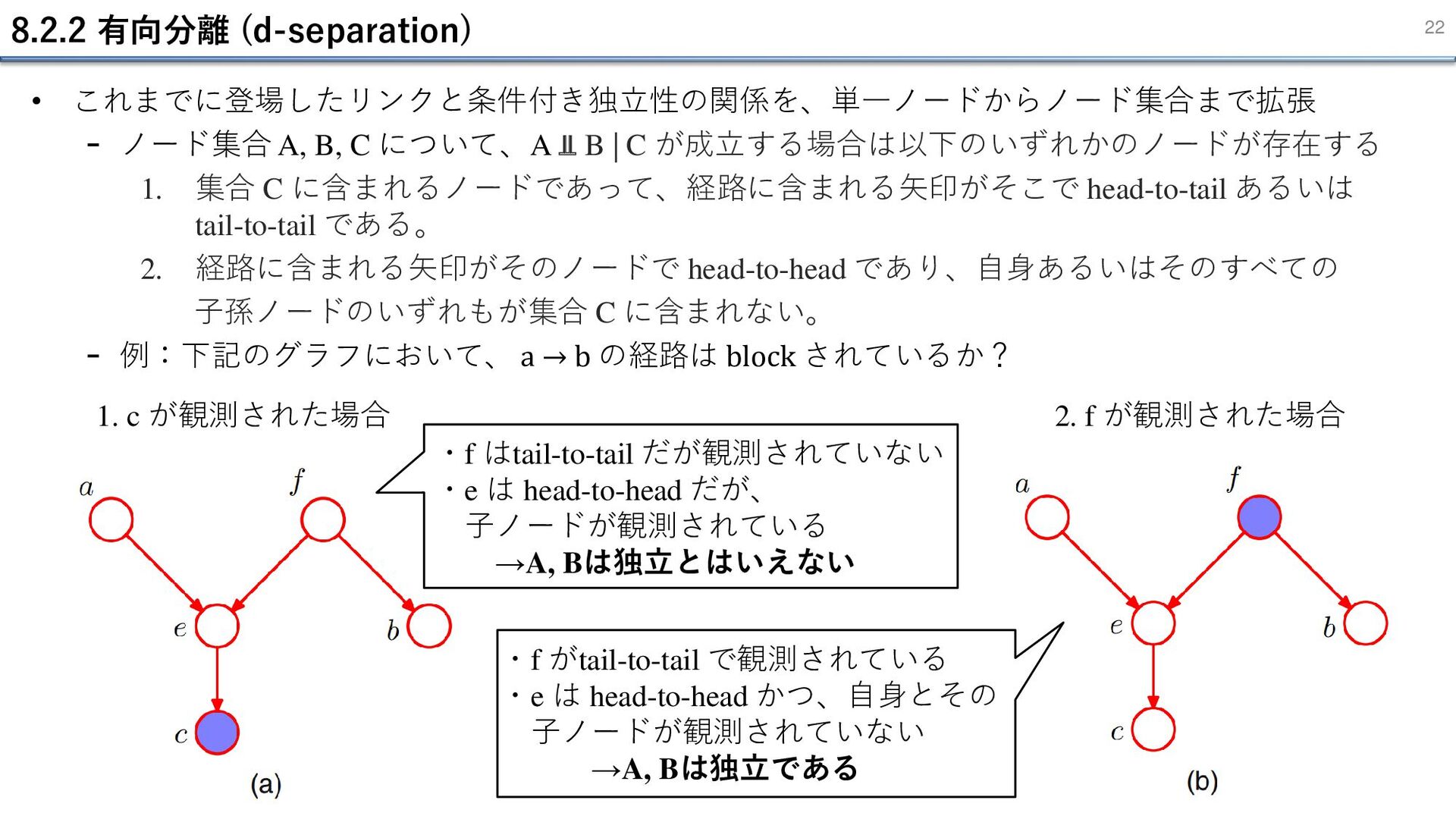
のグラフ - 条件付け無しでも a と b が独立であることが分かる - c で条件付けすると独立ではなくなる - c が観測されていなければ block されており、c が観測されることでa, b間に依存関係が生まれる (8.28) 𝑝 𝑎, 𝑏, 𝑐 = 𝑝 𝑎 𝑝 𝑏 𝑝 𝑐 𝑎, 𝑏 図 8.19 head head 図 8.54 • さらに特殊な性質 - head to head では、c が観測されていなくても、 c の子ノードが観測されていれば a → b の経路 の block が解かれてしまう ➢演習 8.10
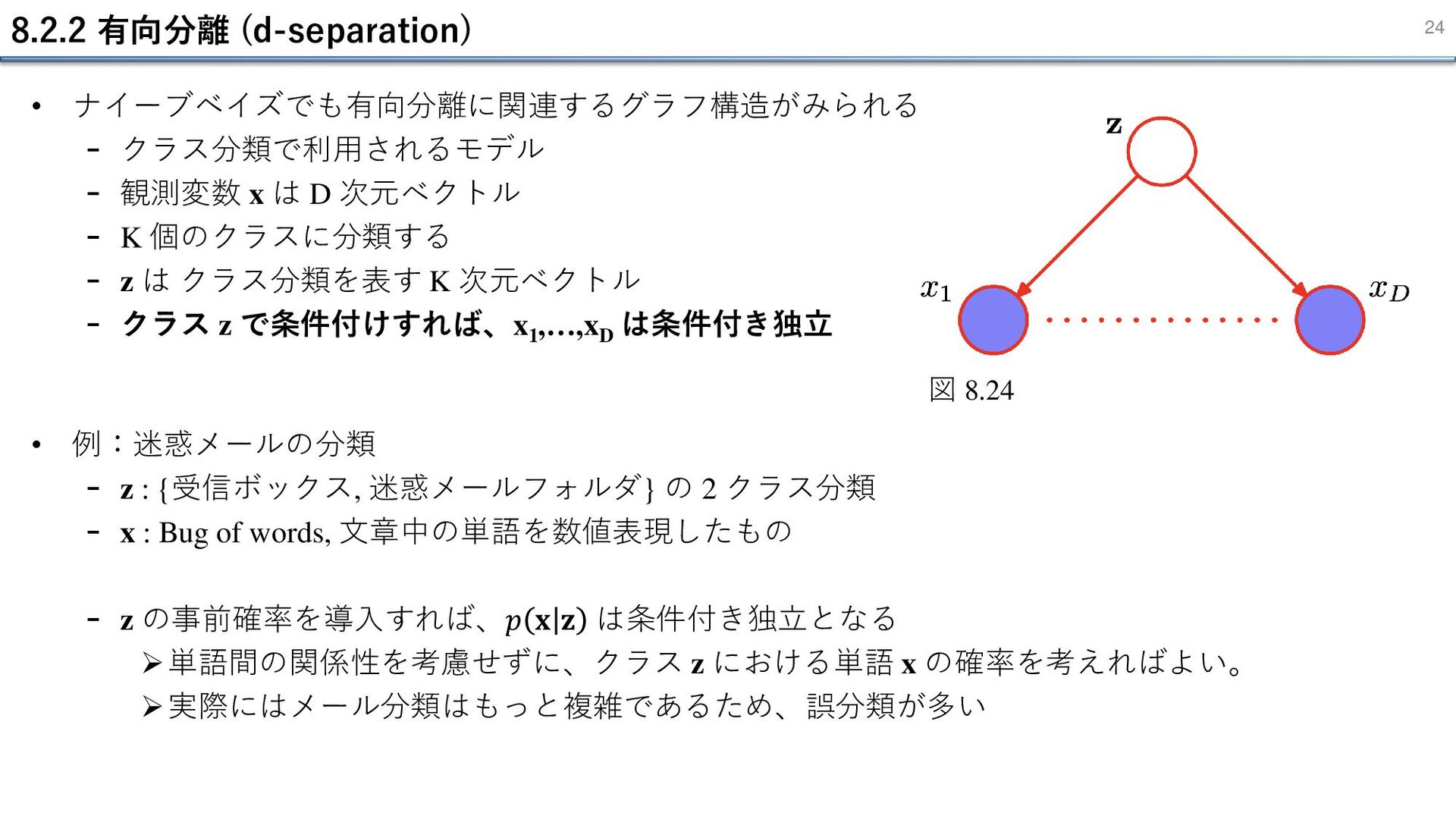
x は D 次元ベクトル - K 個のクラスに分類する - z は クラス分類を表す K 次元ベクトル - クラス z で条件付けすれば、x1 ,…,xD は条件付き独立 図 8.24 • 例:迷惑メールの分類 - z : {受信ボックス, 迷惑メールフォルダ} の 2 クラス分類 - x : Bug of words, 文章中の単語を数値表現したもの - z の事前確率を導入すれば、𝑝 𝐱 𝐳 は条件付き独立となる ➢単語間の関係性を考慮せずに、クラス z における単語 x の確率を考えればよい。 ➢実際にはメール分類はもっと複雑であるため、誤分類が多い
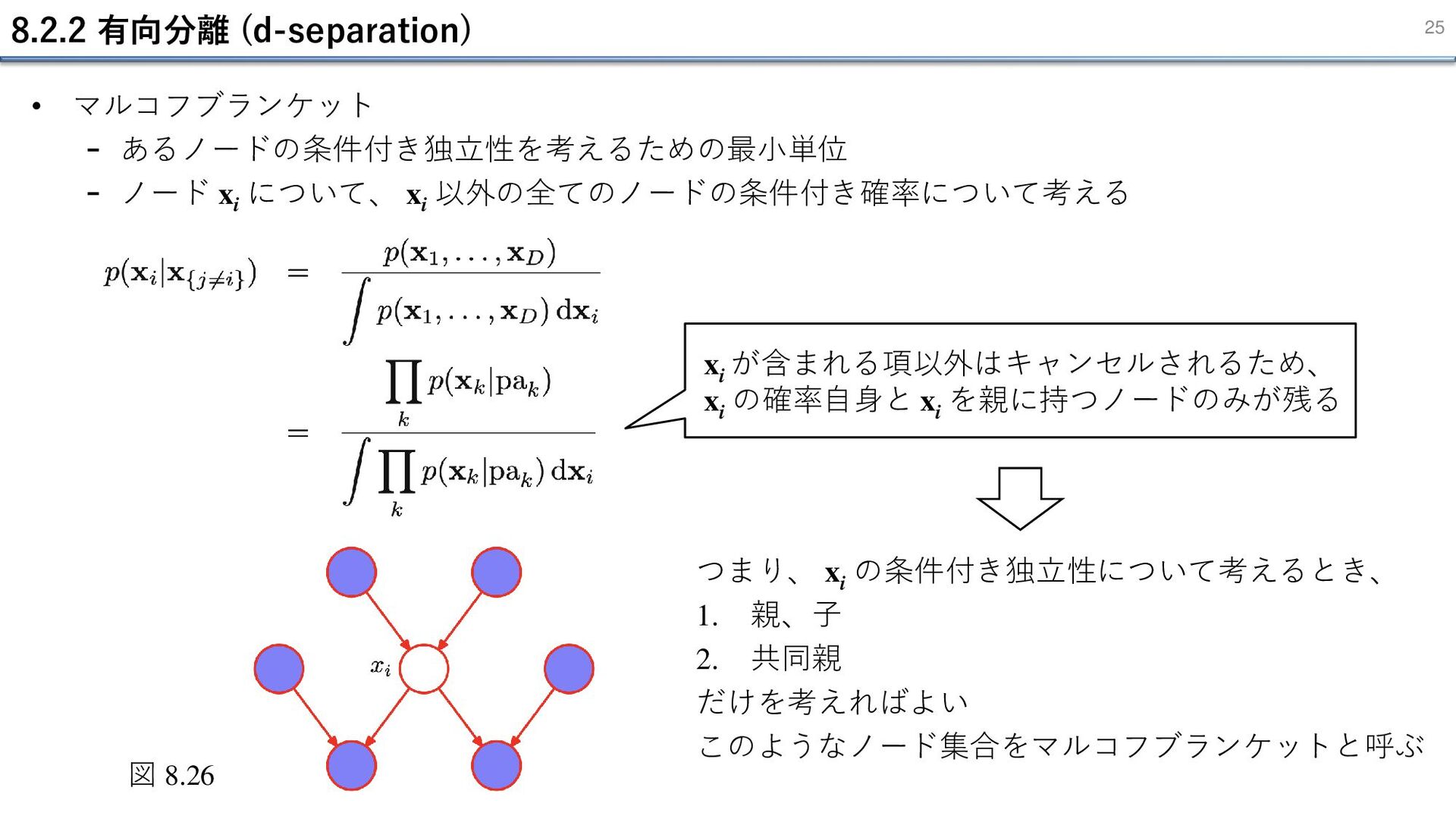
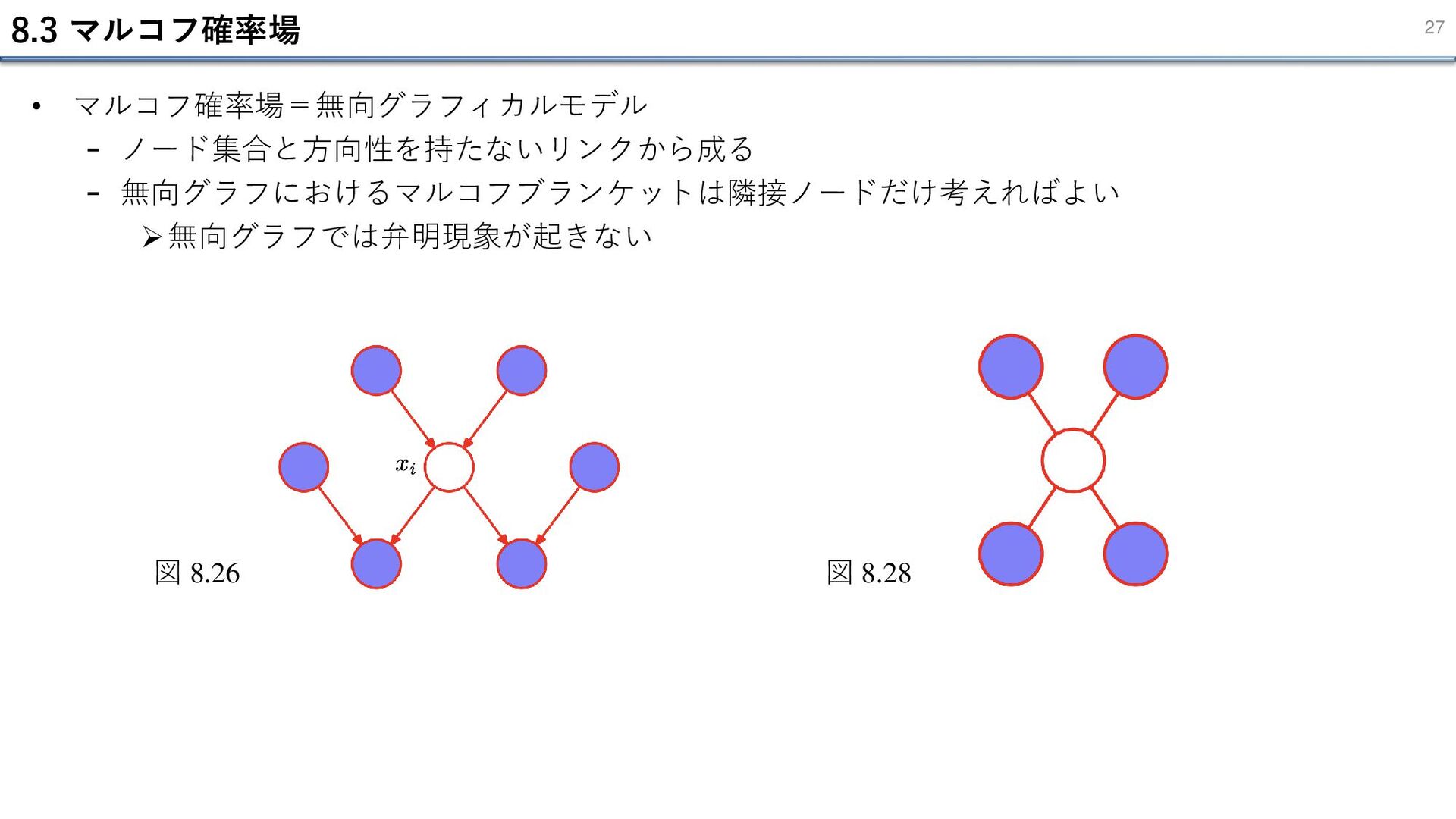
xi について、 xi 以外の全てのノードの条件付き確率について考える 図 8.26 つまり、 xi の条件付き独立性について考えるとき、 1. 親、子 2. 共同親 だけを考えればよい このようなノード集合をマルコフブランケットと呼ぶ xi が含まれる項以外はキャンセルされるため、 xi の確率自身と xi を親に持つノードのみが残る
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}