Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
SmartRig Bipedを使ってみよう / Introduction to SmartRi...
Search
sotanmochi
March 27, 2019
Technology
3.5k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
SmartRig Bipedを使ってみよう / Introduction to SmartRig Biped
sotanmochi
March 27, 2019
More Decks by sotanmochi
See All by sotanmochi
URP/HDRPを使ったVRM対応アプリの開発方法 / VRM Importer Extension
sotanmochi
0
1.8k
画像処理から始めるコンピュートシェーダ / Introduction to Image Processing using Compute Shader
sotanmochi
2
2.7k
Diminished Reality 入門 / Introduction to Diminished Reality
sotanmochi
2
9.5k
Unityでテクスチャにお絵描きするための線分描画アルゴリズムの話 / Line drawing algorithm using fragment shader
sotanmochi
2
4k
MagicOnionでマルチプレイゲームを作ってみる / Introduction to developing multiplayer games using MagicOnion
sotanmochi
1
2.6k
VRMを使ったAR/MR撮影ツールを試作開発してみた話 / Prototype of Mobile Mixed Capture
sotanmochi
0
1.8k
リアルとバーチャルの融合によって越えられない壁を壊す / TechCafe vol.8 LT
sotanmochi
0
300
ユニティちゃんと鬼ごっこができるMRゲームと戦術位置解析システム / Mixed reality game and tactical position analysis
sotanmochi
0
730
Research modeで取得した深度(Depth)データを可視化する / Depth data visualization for Hololens RS4 Research mode
sotanmochi
0
210
Other Decks in Technology
See All in Technology
Data + AI Summit 2026 イベントレポート: 「AIがビジネスで意思決定するデータ基盤」へ
nek0128
0
280
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
240
OPENLOGI Company Profile for engineer
hr01
1
74k
AmplifyHostingConstructからSSRフレームワークのためのホスティング設計を考察する/amplify-hosting-construct
fossamagna
1
240
ゴールデンパスは敷いただけでは道にならない ─ 企画部門のエンジニアが技術標準を事業価値に変えるまで
mhrtech
1
230
LLMやAIエージェントをソフトウェアに組み込むプラクティス
shibuiwilliam
2
420
「最後に責任を取るのはチーム」— 人間のPRレビューを最小化してアップデートしたメンタルモデル
jnishime_dresscode
0
920
Amplify Gen2でbackend.tsにCDKを定義する/しない事によるCDKの挙動の違いとユースケース
smt7174
1
420
個人開発で育てる「大規模設計の苗床」 - AI時代の1人開発から始める業務への知識接続 / The Seedbed for Large-Scale Design - From AI-Era Solo Projects to Professional Knowledge
bitkey
PRO
1
280
AI Agent SaaS を支える自社仮想化基盤への挑戦と実運用 / ai-agent-saas-virtualization
flatt_security
3
4.2k
世界、断片、モデル。そして理解
ardbeg1958
1
130
Kaggleで成長するために意識したこと
prgckwb
2
420
Featured
See All Featured
Primal Persuasion: How to Engage the Brain for Learning That Lasts
tmiket
0
390
Beyond borders and beyond the search box: How to win the global "messy middle" with AI-driven SEO
davidcarrasco
3
180
The Impact of AI in SEO - AI Overviews June 2024 Edition
aleyda
5
1.1k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
For a Future-Friendly Web
brad_frost
183
10k
Efficient Content Optimization with Google Search Console & Apps Script
katarinadahlin
PRO
1
730
Keith and Marios Guide to Fast Websites
keithpitt
413
23k
Easily Structure & Communicate Ideas using Wireframe
afnizarnur
194
17k
Agile that works and the tools we love
rasmusluckow
331
22k
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
230
Transcript
SmartRig Bipedを使ってみよう 2019/03/27 sotan (@sotanmochi)
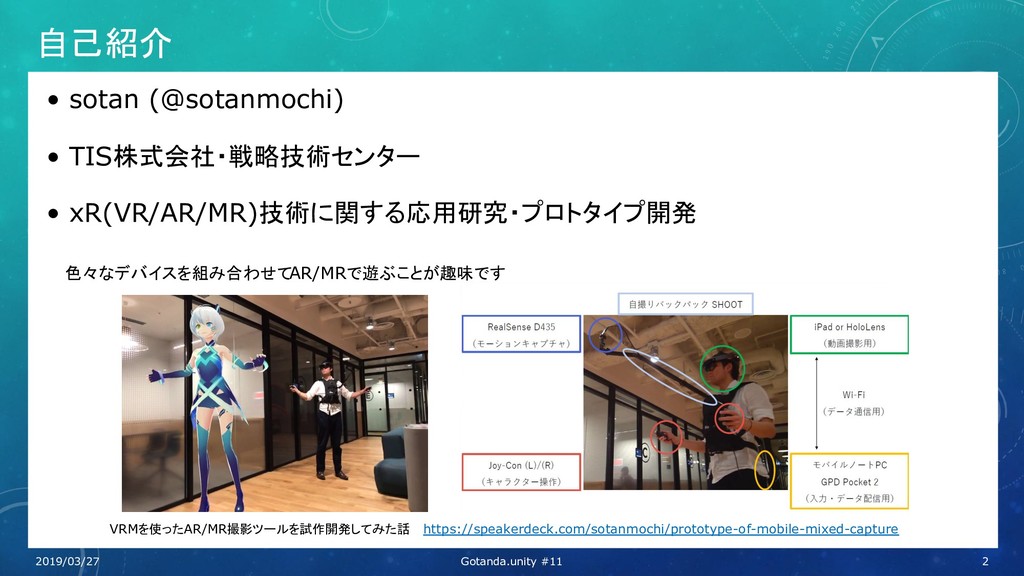
自己紹介 • sotan (@sotanmochi) • TIS株式会社・戦略技術センター • xR(VR/AR/MR)技術に関する応用研究・プロトタイプ開発 2 VRMを使ったAR/MR撮影ツールを試作開発してみた話
https://speakerdeck.com/sotanmochi/prototype-of-mobile-mixed-capture 2019/03/27 Gotanda.unity #11 色々なデバイスを組み合わせて AR/MRで遊ぶことが趣味です
話の流れ • SmartRig Bipedを使ってみた • パラメータ調整について • まとめ 3 2019/03/27
Gotanda.unity #11
SmartRig Bipedを使ってみた
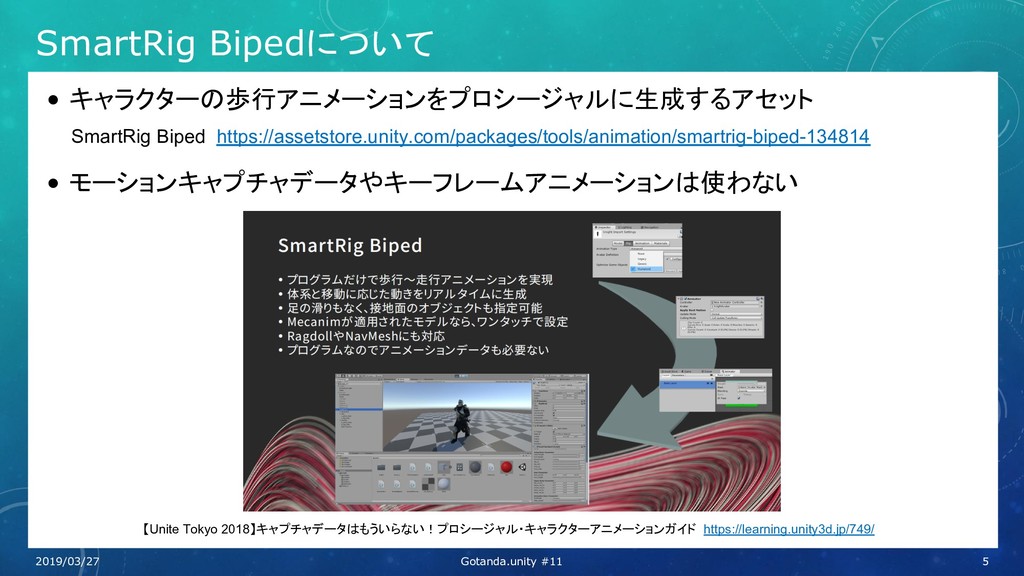
SmartRig Bipedについて • キャラクターの歩行アニメーションをプロシージャルに生成するアセット • モーションキャプチャデータやキーフレームアニメーションは使わない 5 【Unite Tokyo 2018】キャプチャデータはもういらない!プロシージャル・キャラクターアニメーションガイド
https://learning.unity3d.jp/749/ SmartRig Biped https://assetstore.unity.com/packages/tools/animation/smartrig-biped-134814 2019/03/27 Gotanda.unity #11
SmartRig Bipedを使ってみた • デモ動画 https://youtu.be/LlzCTsNxVdc 6 2019/03/27 Gotanda.unity #11 サンプルプロジェクト
https://github.com/sotanmochi/SmartRigBipedSample
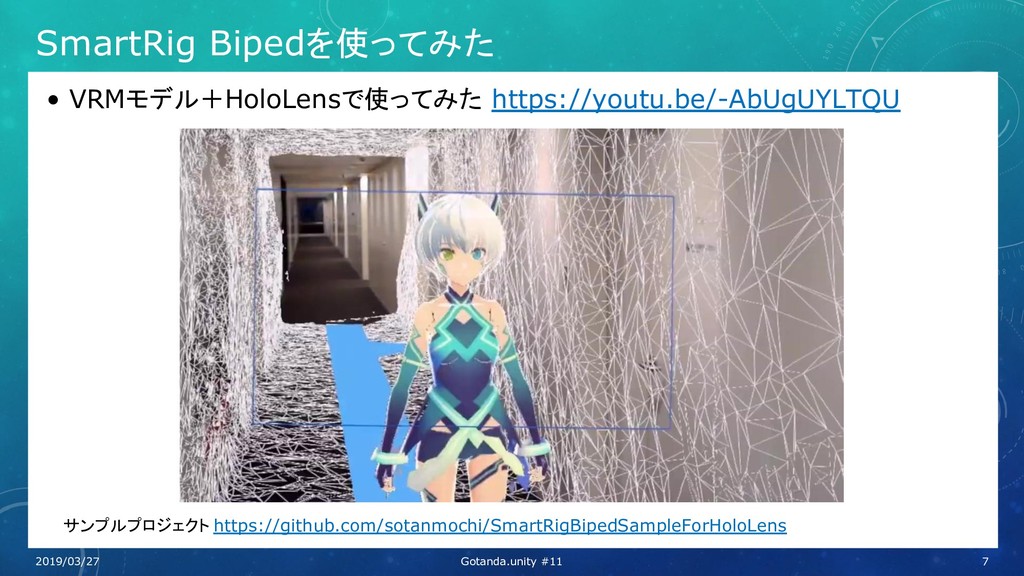
SmartRig Bipedを使ってみた • VRMモデル+HoloLensで使ってみた https://youtu.be/-AbUgUYLTQU 7 2019/03/27 Gotanda.unity #11 サンプルプロジェクト
https://github.com/sotanmochi/SmartRigBipedSampleForHoloLens
SmartRig Bipedの使い方 • SmartRig公式のチュートリアル動画 • Tutorial1 https://youtu.be/MW4jkYSa5Nk • Tutorial2 https://youtu.be/SPMRLJZMoU8
8 2019/03/27 Gotanda.unity #11
パラメータ調整について
パラメータ値の設定例 • スクリプトで修正していないパラメータはデフォルト値のまま 10 2019/03/27 Gotanda.unity #11
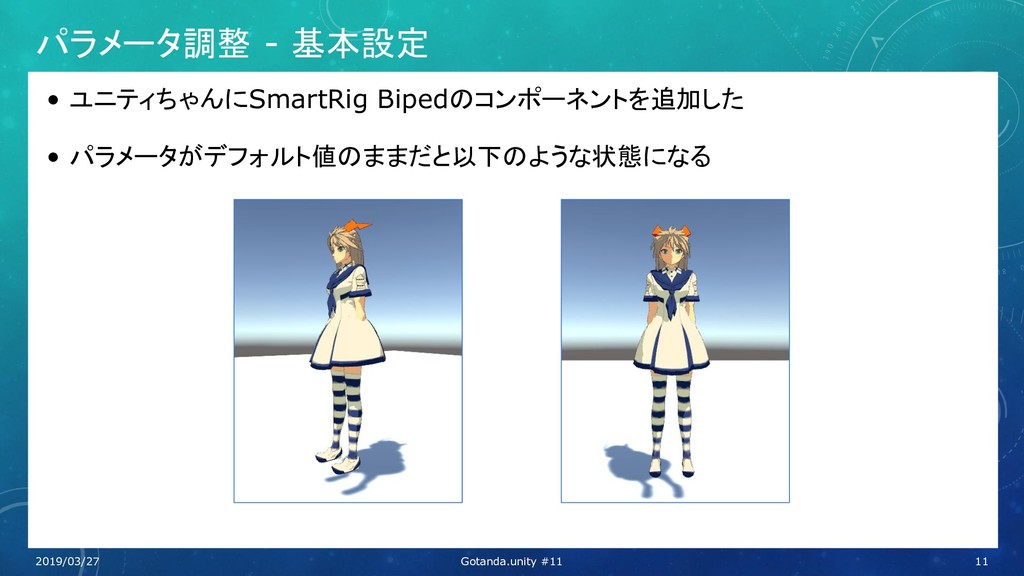
パラメータ調整 - 基本設定 • ユニティちゃんにSmartRig Bipedのコンポーネントを追加した • パラメータがデフォルト値のままだと以下のような状態になる 11 2019/03/27
Gotanda.unity #11
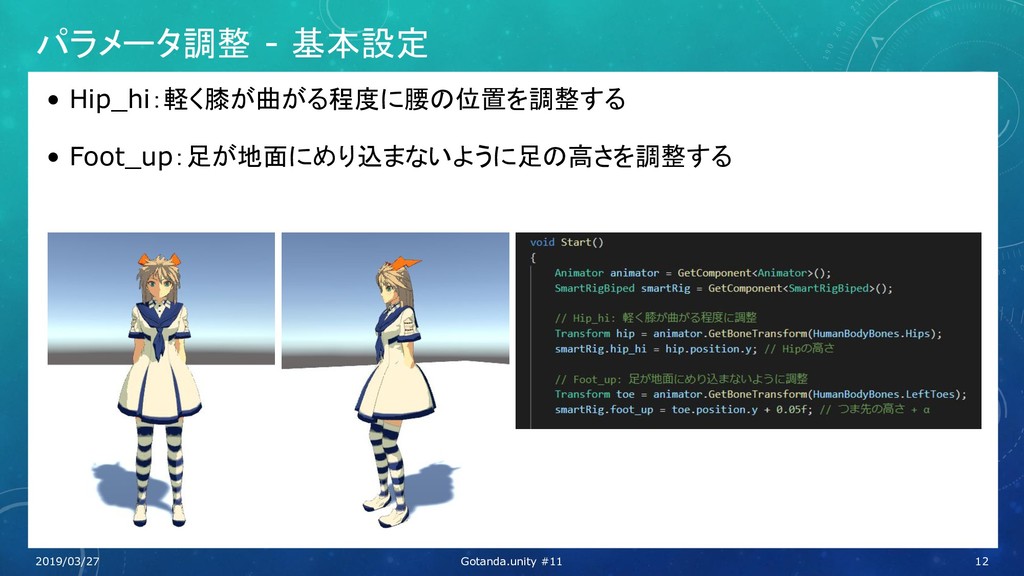
パラメータ調整 - 基本設定 • Hip_hi:軽く膝が曲がる程度に腰の位置を調整する • Foot_up:足が地面にめり込まないように足の高さを調整する 12 2019/03/27 Gotanda.unity
#11
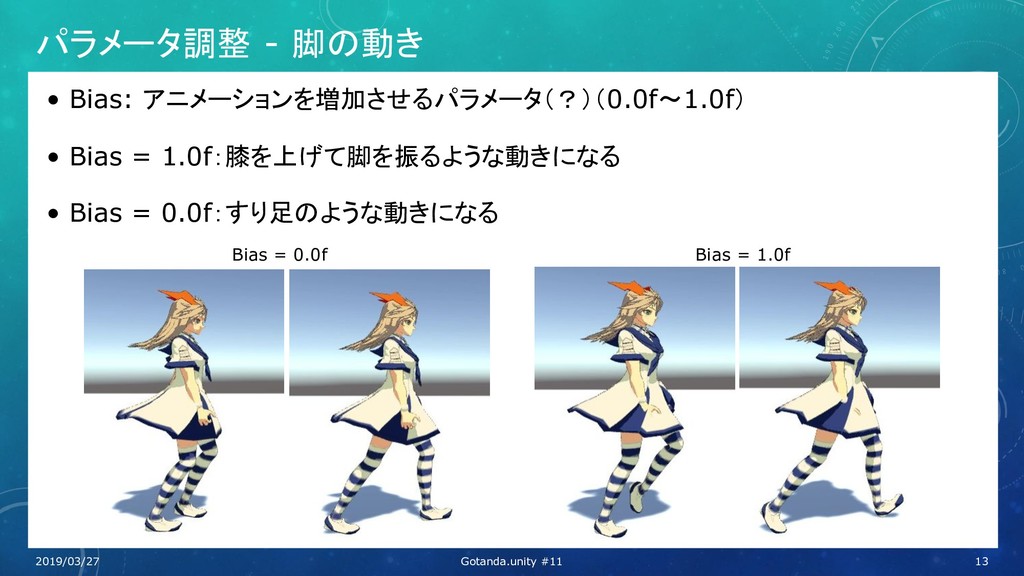
パラメータ調整 - 脚の動き • Bias: アニメーションを増加させるパラメータ(?)(0.0f~1.0f) • Bias = 1.0f:膝を上げて脚を振るような動きになる
• Bias = 0.0f:すり足のような動きになる 13 2019/03/27 Gotanda.unity #11 Bias = 0.0f Bias = 1.0f
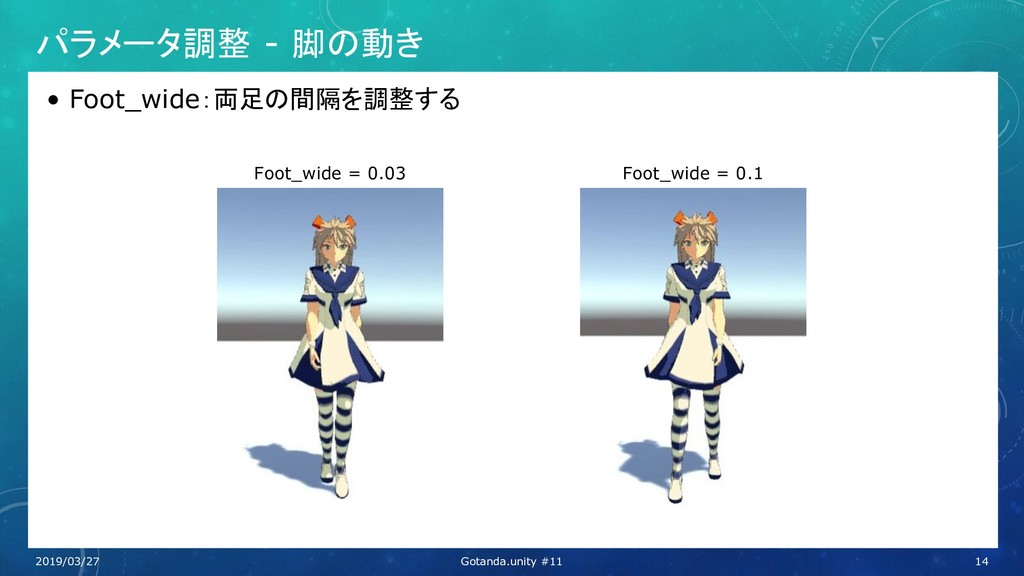
パラメータ調整 - 脚の動き • Foot_wide:両足の間隔を調整する 14 2019/03/27 Gotanda.unity #11 Foot_wide
= 0.03 Foot_wide = 0.1
パラメータ調整 - 腕の動き • Arm_rot_fix:腕の角度を調整する 15 2019/03/27 Gotanda.unity #11 Arm_rot_fix.z
= 0.0f Arm_rot_fix.z = 15.0f Arm_rot_fix.z = 45.0f
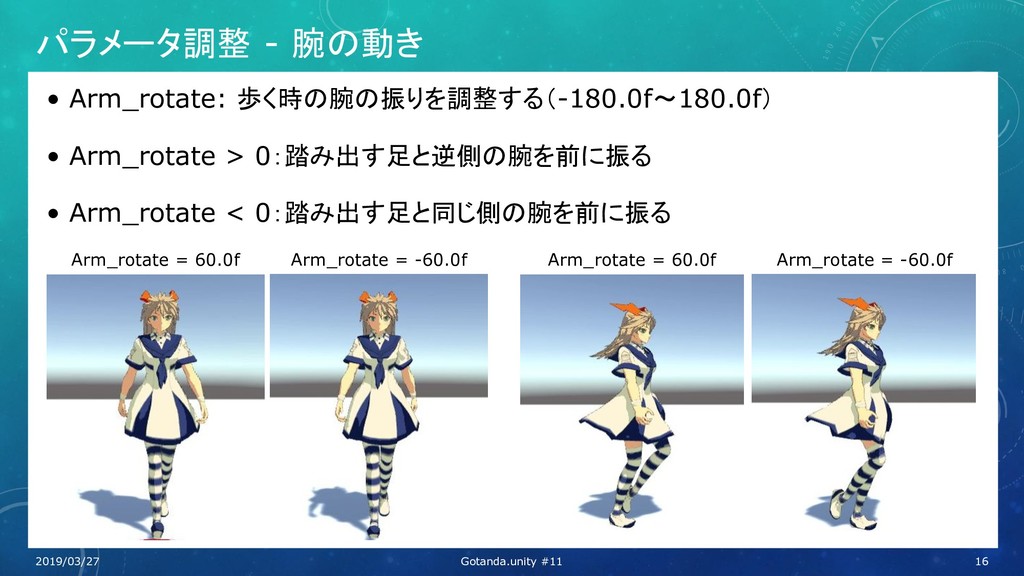
パラメータ調整 - 腕の動き • Arm_rotate: 歩く時の腕の振りを調整する(-180.0f~180.0f) • Arm_rotate > 0:踏み出す足と逆側の腕を前に振る
• Arm_rotate < 0:踏み出す足と同じ側の腕を前に振る 16 2019/03/27 Gotanda.unity #11 Arm_rotate = 60.0f Arm_rotate = -60.0f Arm_rotate = 60.0f Arm_rotate = -60.0f
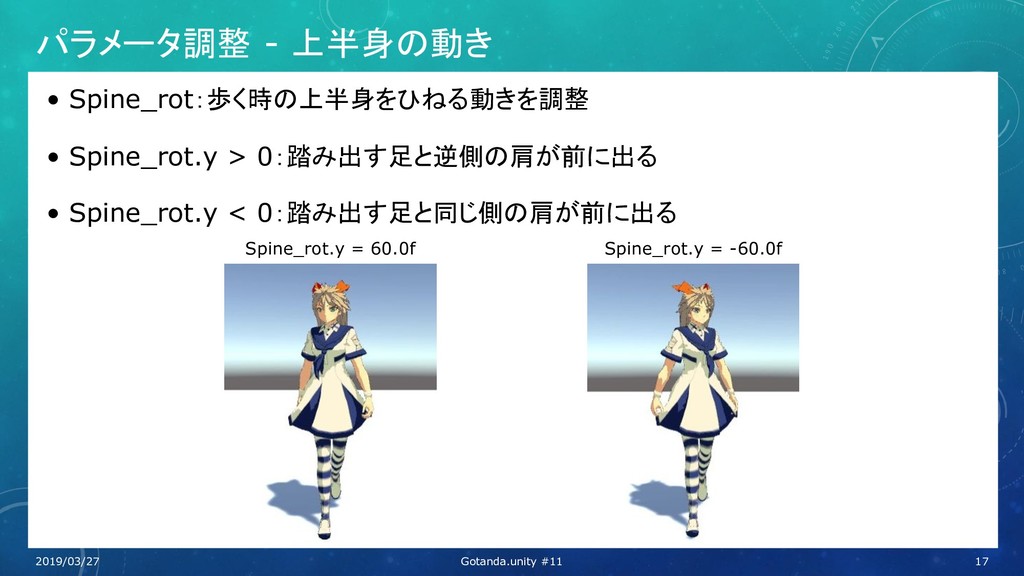
パラメータ調整 - 上半身の動き • Spine_rot:歩く時の上半身をひねる動きを調整 • Spine_rot.y > 0:踏み出す足と逆側の肩が前に出る •
Spine_rot.y < 0:踏み出す足と同じ側の肩が前に出る 17 2019/03/27 Gotanda.unity #11 Spine_rot.y = 60.0f Spine_rot.y = -60.0f
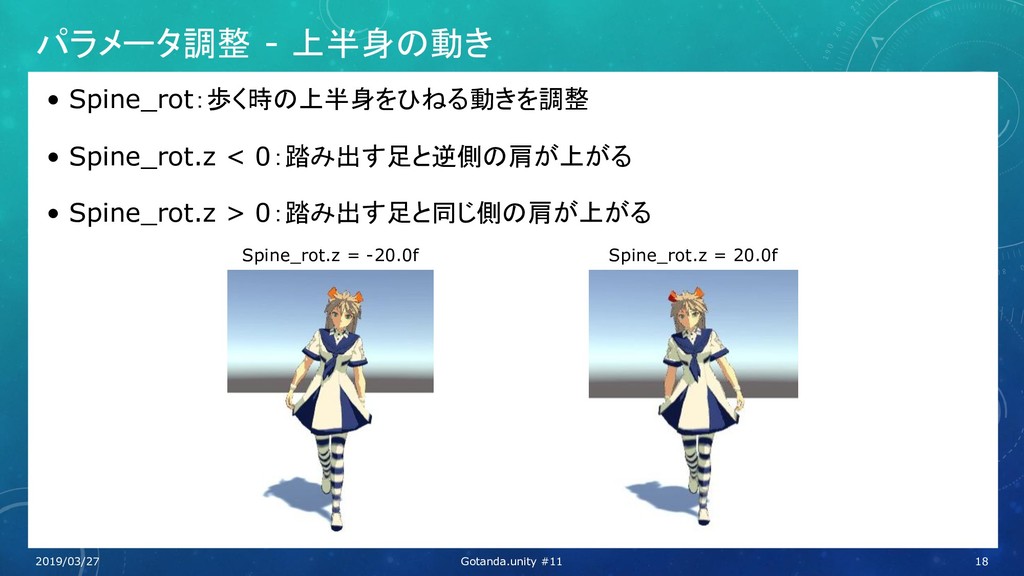
パラメータ調整 - 上半身の動き • Spine_rot:歩く時の上半身をひねる動きを調整 • Spine_rot.z < 0:踏み出す足と逆側の肩が上がる •
Spine_rot.z > 0:踏み出す足と同じ側の肩が上がる 18 2019/03/27 Gotanda.unity #11 Spine_rot.z = -20.0f Spine_rot.z = 20.0f
パラメータ調整 - 頭の動き • Head_rot:歩く時の頭が揺れる動きを調整 • 上半身をひねるように動かす時、 頭を揺らしたくない場合はSpine_rotと近い値に設定しておく (参考) •
Head_rot.y > 0:踏み出す足と逆の方向を見る(右足を踏み出す時に頭は左を向く) • Head_rot.z < 0:前に出した足と逆の方向に頭が下がる(右足を踏み出す時に頭が左に下がる) 19 2019/03/27 Gotanda.unity #11
まとめ
まとめ • SmartRig Bipedは歩行アニメーションをプロシージャルに生成するアセット • ユニティちゃんを歩かせるサンプルを作ってみた • 代表的なパラメータ値の調整について紹介した 21 2019/03/27
Gotanda.unity #11 SmartRig Bipedを使ってみよう!
ありがとうございました
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}