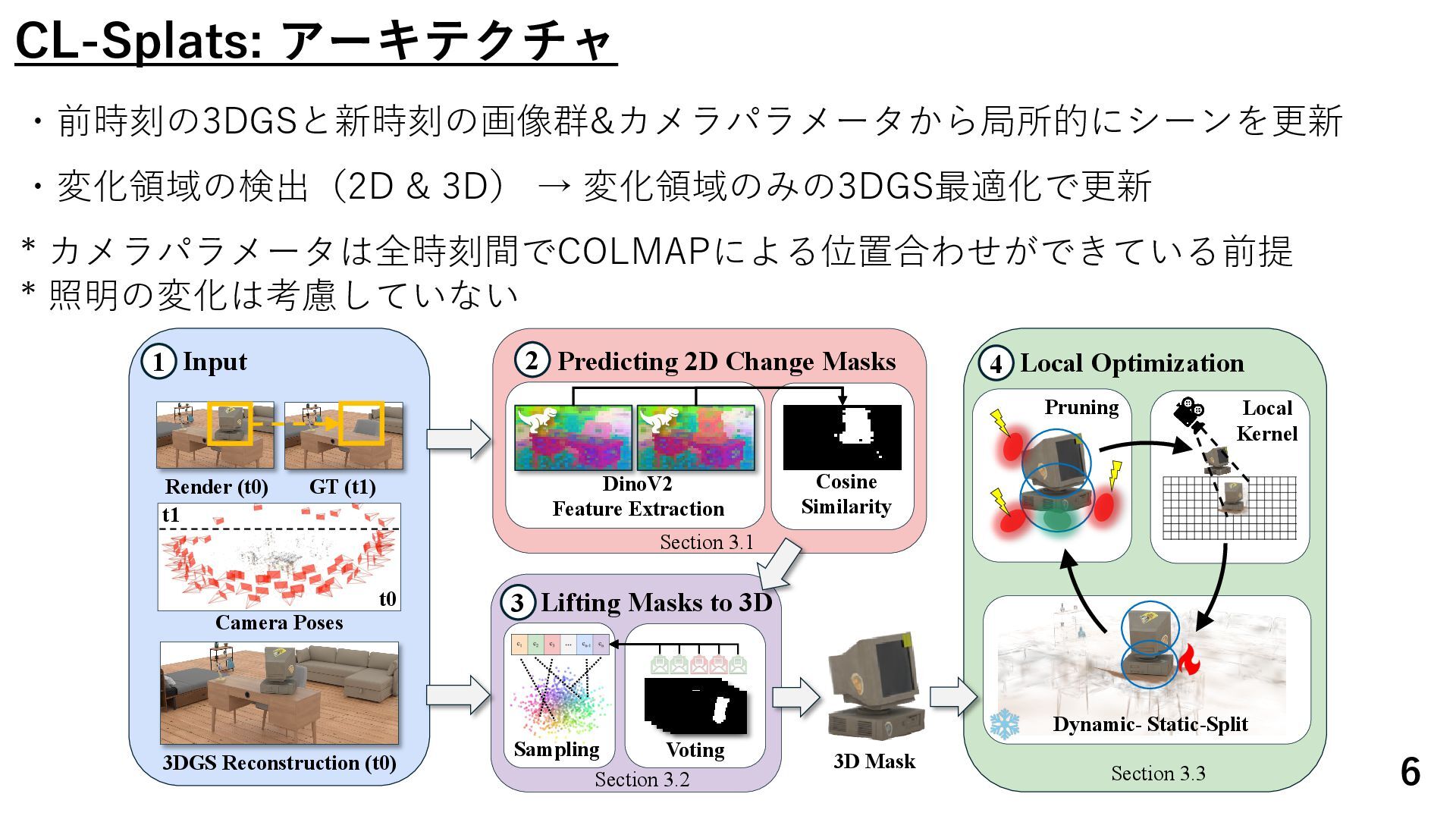
Extraction Predicting 2D Change Masks Render (t0) GT (t1) Input 1 2 4 t1 Cosine Similarity DinoV2 Feature Extraction Predicting 2D Change Masks Render (t0) GT (t1) Input 3DGS Reconstruction (t0) 3D Mask Camera Poses Sampling Voting Section 3.1 Lifting Masks to 3D 1 2 3 t1 t0 Similarity Feature Extraction 3DGS Reconstruction (t0) 3D Mask Camera Poses Sampling Voting Section 3.1 Section 3.2 Lifting Masks to 3D 3 t1 t0 ・更新後の3DGS 出⼒ Time 0 Time 1 Time 2 Time 3 Time 0 à Time 1 Time 1 à Time 2 Time 2 à Time 3
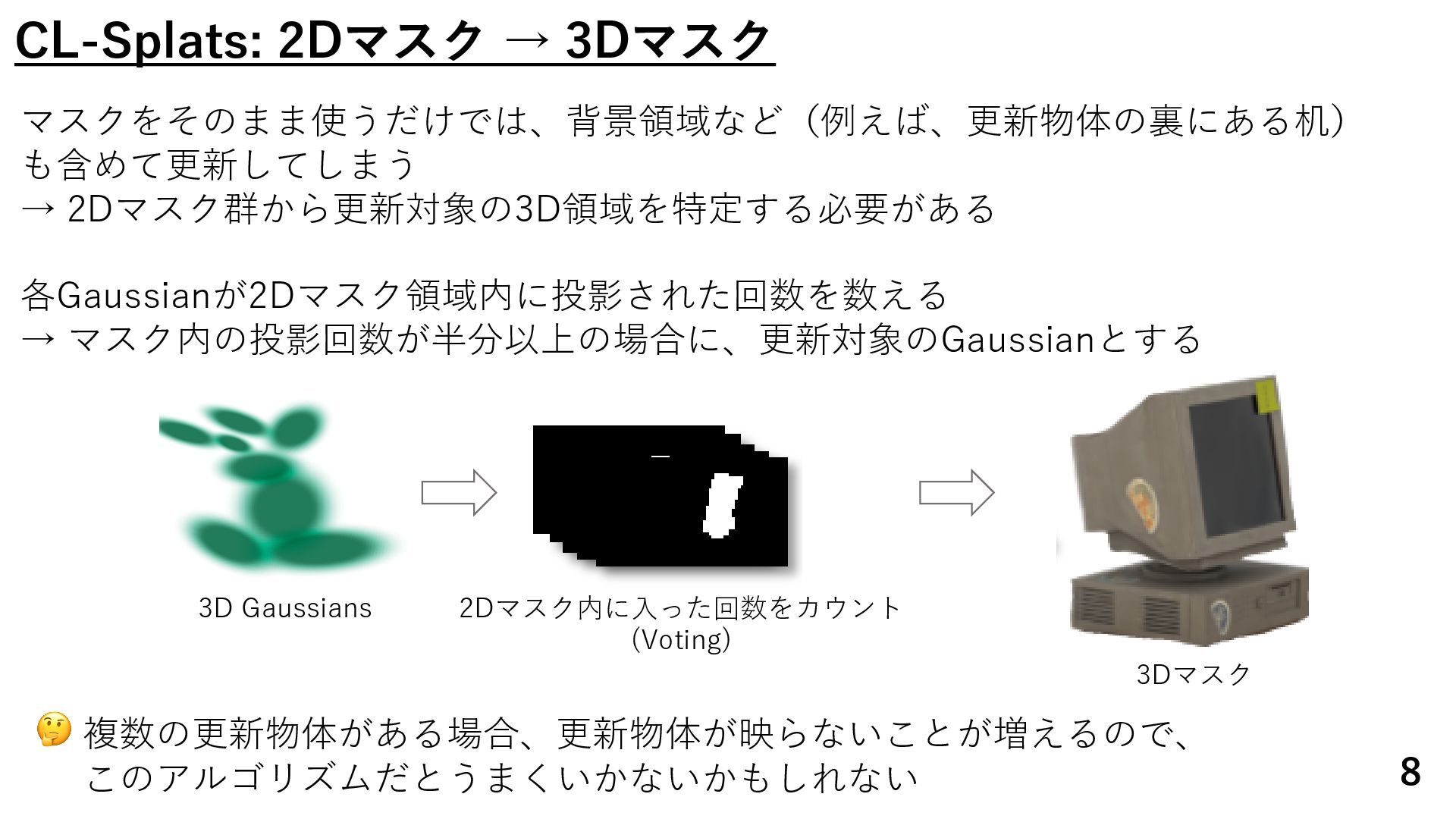
マスク内の投影回数が半分以上の場合に、更新対象のGaussianとする Differentia Tile Rasteri Adaptive Density Control Projection 3D Gaussians Camera Operation 3D Gaussians 2Dマスク内に⼊った回数をカウント (Voting) Similarity Feature Extraction 3D Mask Sampling Voting Section 3.1 Section 3.2 Lifting Masks to 3D 3 Cosine Similarity DinoV2 Feature Extraction 3D Mask Sampling Voting Section 3.1 Section 3.2 Lifting Masks to 3D 3 3Dマスク 8 🤔 複数の更新物体がある場合、更新物体が映らないことが増えるので、 このアルゴリズムだとうまくいかないかもしれない
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![関連研究: CL-NeRF、CLNeRF CLNeRF [Cai+, ICCV2023] ・NeRFの破滅的忘却を防ぐため、過去のカメラパラメータを保存しておいて、 過去の情報も継続的に学習 ・時間による形状・外観の変化をAppearance & Geometry](https://files.speakerdeck.com/presentations/a42681fac7f1467f84687f81078b7e99/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Limitation and Future Work ・3DGSの再構成能⼒に依存 ・シーン全体の変化(照明変化等)は対応していない → GaussianUpdate [Zeng+, ICCV2025]](https://files.speakerdeck.com/presentations/a42681fac7f1467f84687f81078b7e99/slide_17.jpg){kind=link}
{kind=link}