In order to connect devices (e.g. RGB LED, temperature sensor, ...) to your microcontroller (e.g. Arduino, ARM board, ESP8266), you'll need to use some kind of bus. Come and learn about how some common types of bus work. I'll cover at least I2C and SPI, and perhaps others such as RS-232, parallel, etc.
Understanding how these buses work isn't always strictly necessary in order to use them, but it will help out when you want to:
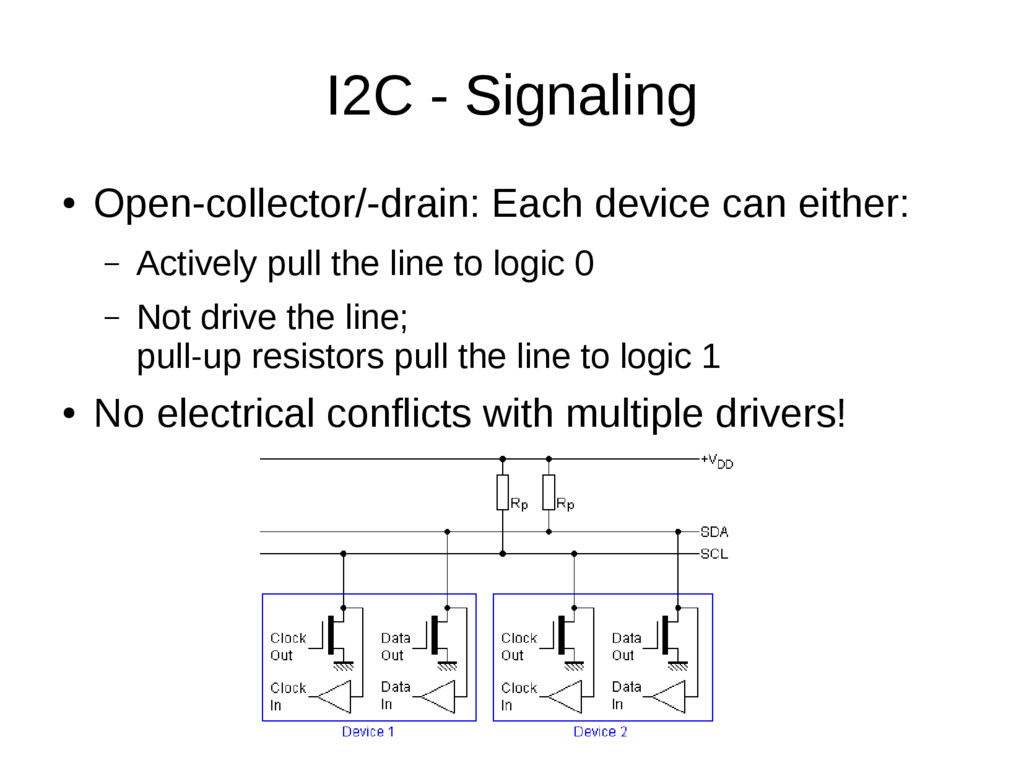
• Work out how to connect your device to your micro-controller electrically.
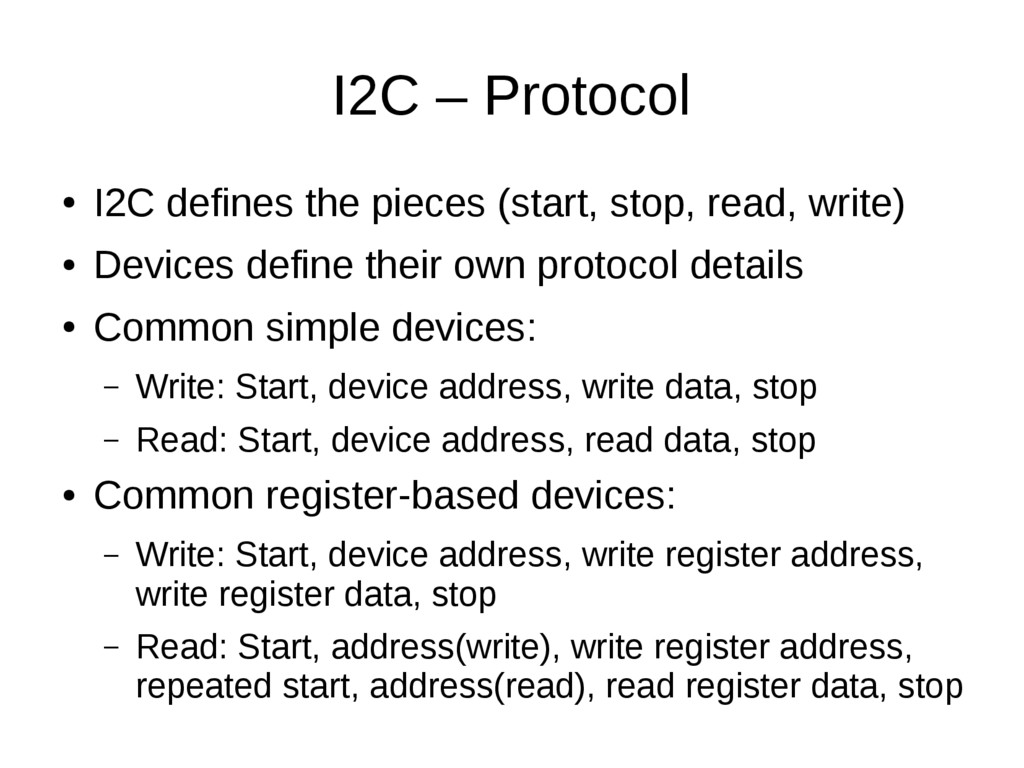
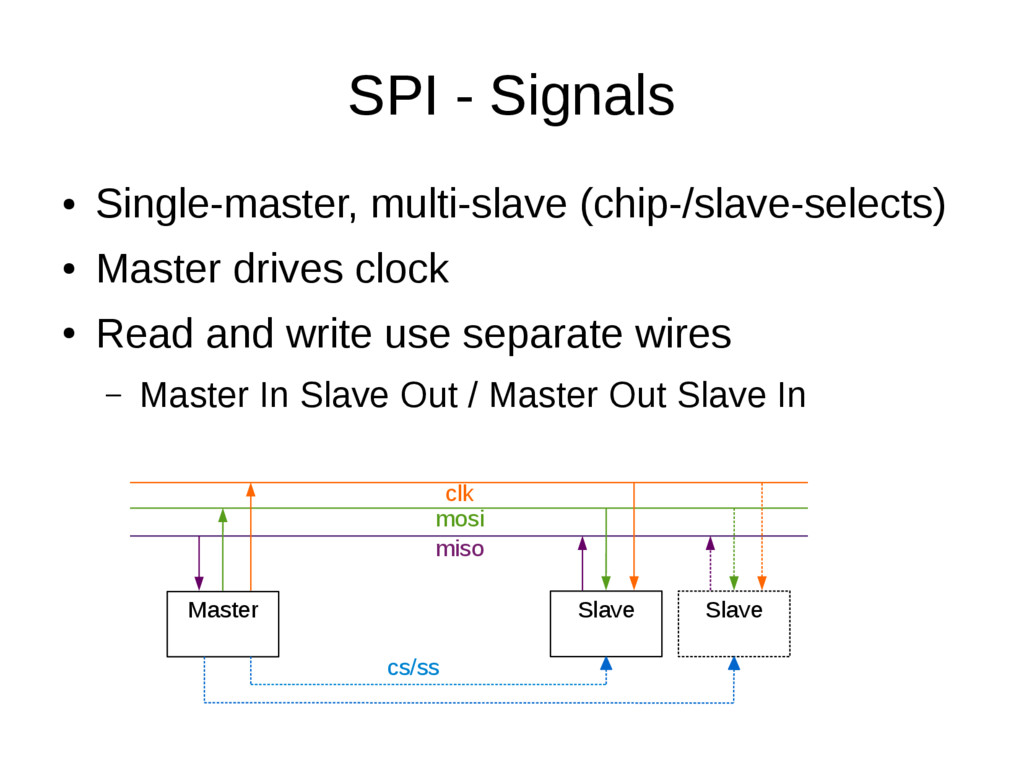
• Understand what information you'll need in order to write code to communicate with your device, e.g. what's an "I2C address", or an "SPI chip select"?
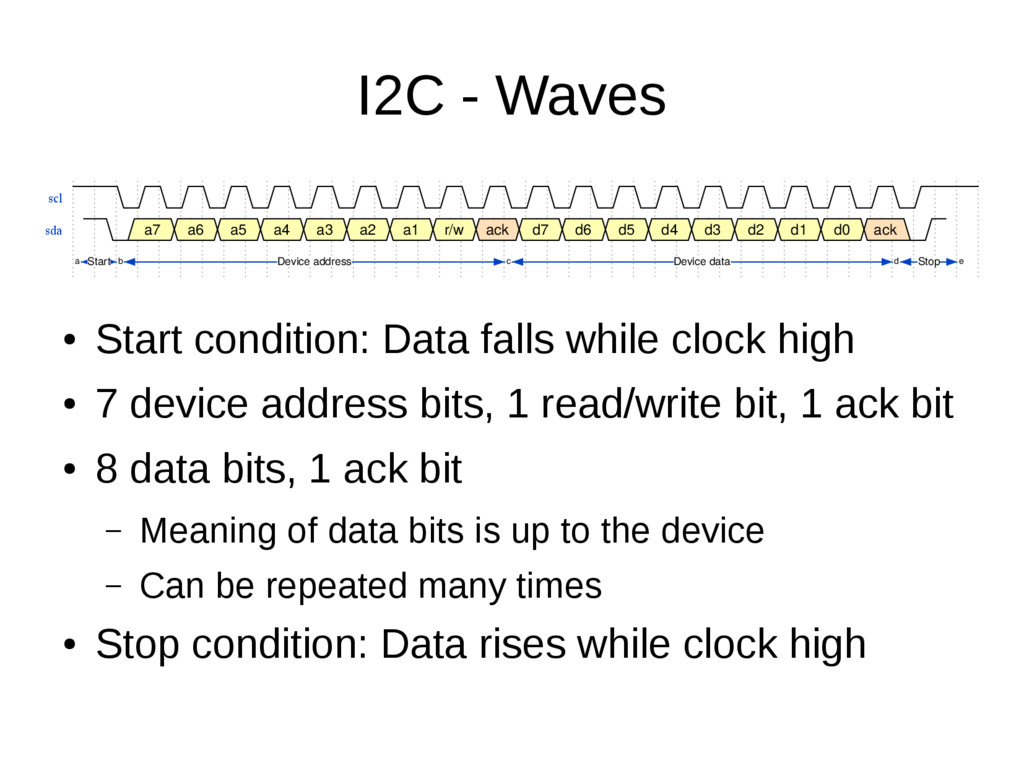
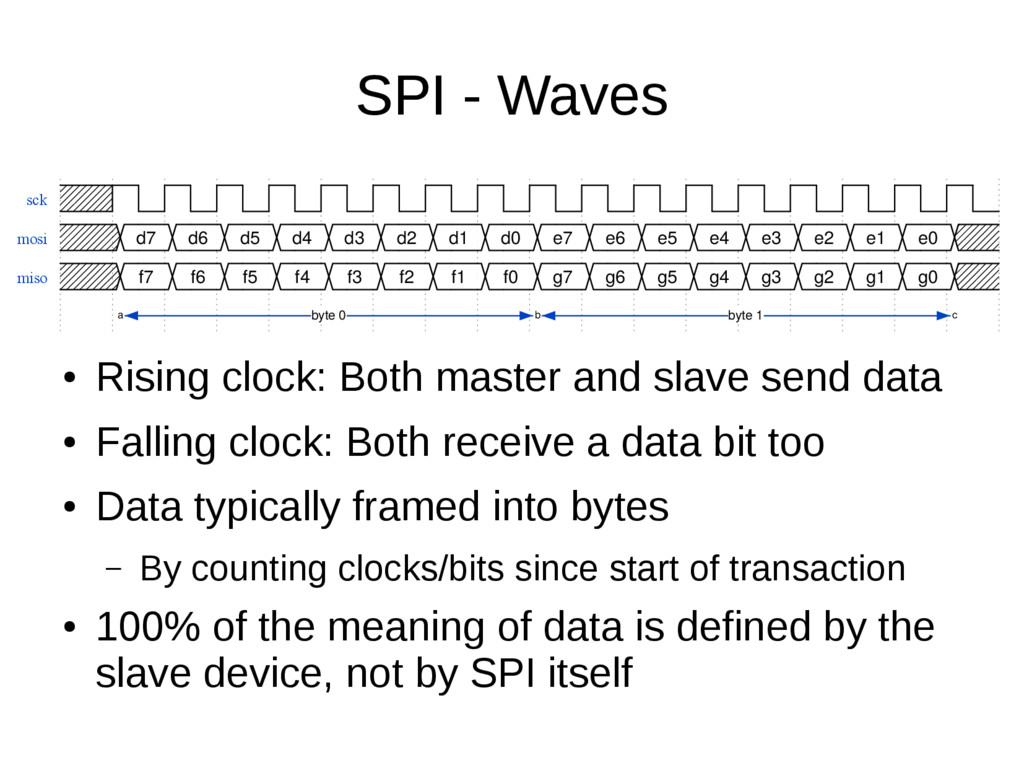
• Debug why your system isn't working, using an oscilloscope or logic analyzer.
• You want a deeper understanding of the systems you're building, in the maker spirit.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Simple Parallel Port - Waves d[7:0] H e l l](https://files.speakerdeck.com/presentations/12c2d092b81f43b491e498eaaa23f145/slide_8.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}