TOPPERSカンファレンス2022
2022/06/10
https://www.toppers.jp/conference2022.html
概要:
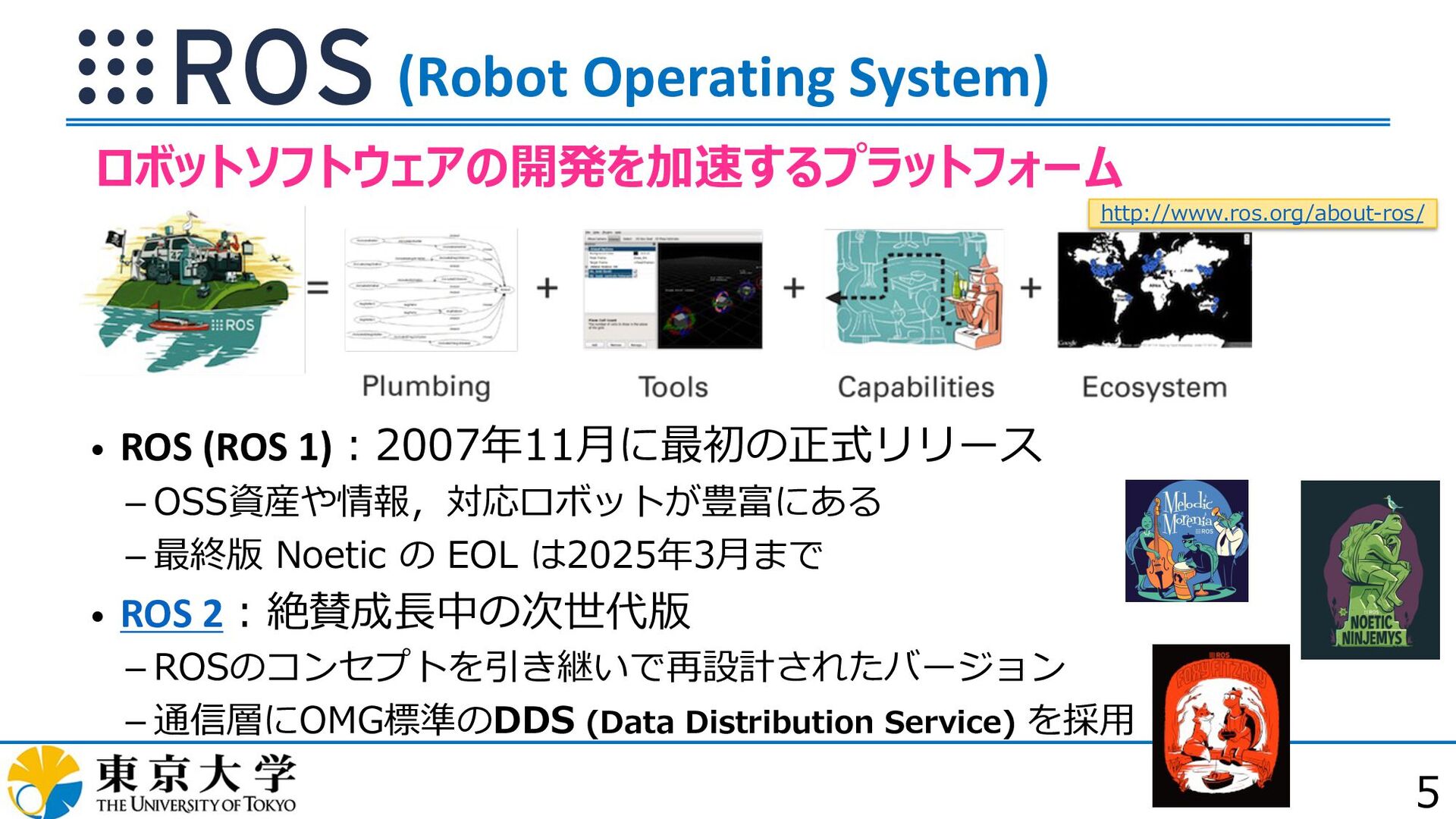
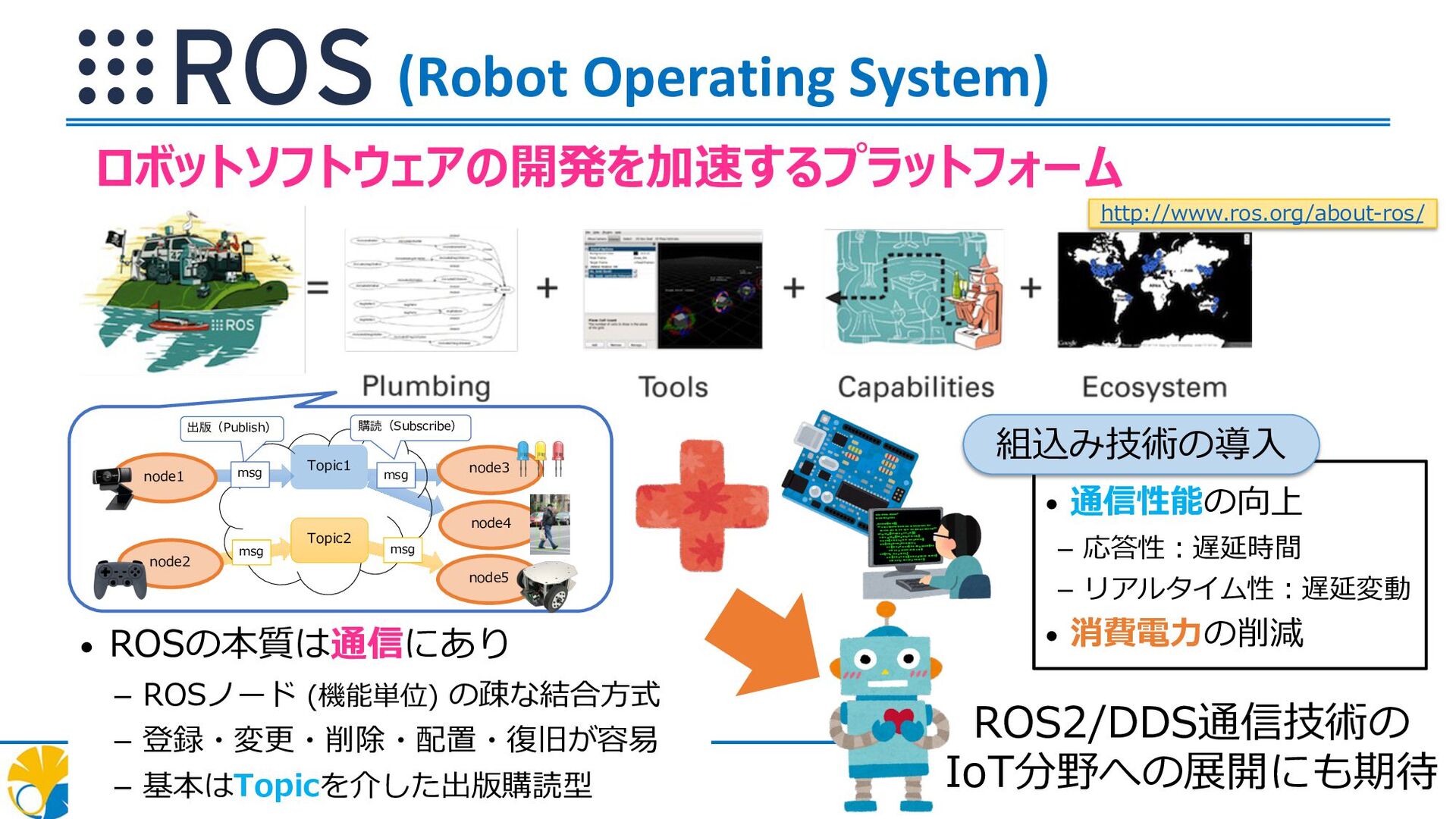
ロボットソフトウェアの開発を加速するプラットフォームであるROS(Robot Operating System)が注目を集めています。本発表では、ROS 2で採用されているDDS/RTPS通信を組込みデバイス上から実現できる実行環境であるmROS 2を紹介します。mROS 2のSTM32 NUCLEO-F767ZIボード向け実装では、TOPPERS/ASP3カーネルおよび組込み向けの軽量プロトコルスタックを採用しています。本技術は、通信性能に優れた分散ロボットシステムを実現できるのみならず、ROS 2通信技術のIoT分野への展開に向けて貢献できることを示します。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
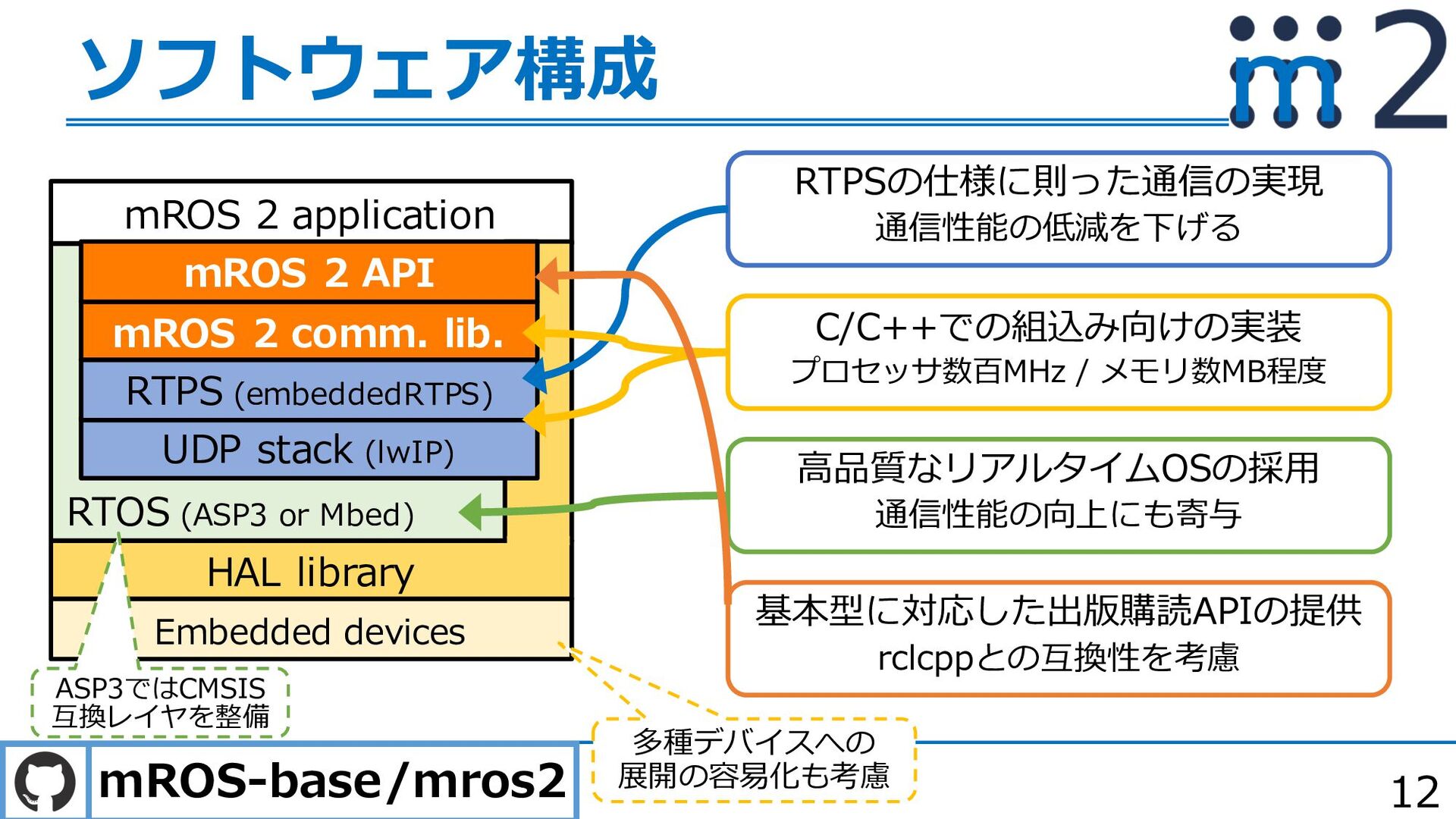
![13 補⾜︓embeddedRTPS [A. Kampmann+ ITSC'2019] • C++実装による組込み向けのRTPSスタック UDP/IP には lwIP](https://files.speakerdeck.com/presentations/6167dc492f1e46d19b4f15bede431b28/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}