■最短経路を探索しよう
避難中に道路が通れなかったり、避難所が満杯で入れず、別の避難所へ避難することがあります。
A*探索アルゴリズムは、高速に経路探索できるためおすすめです。
歩行モデルの拡張
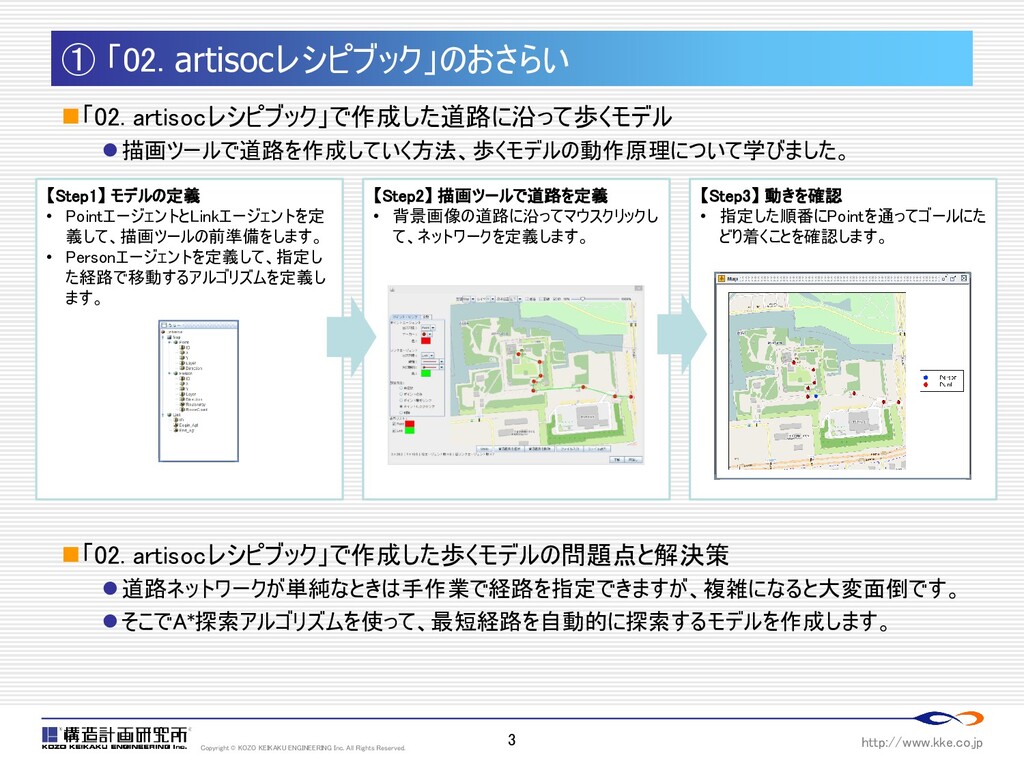
①「02. artisocレシピブック」のおさらい
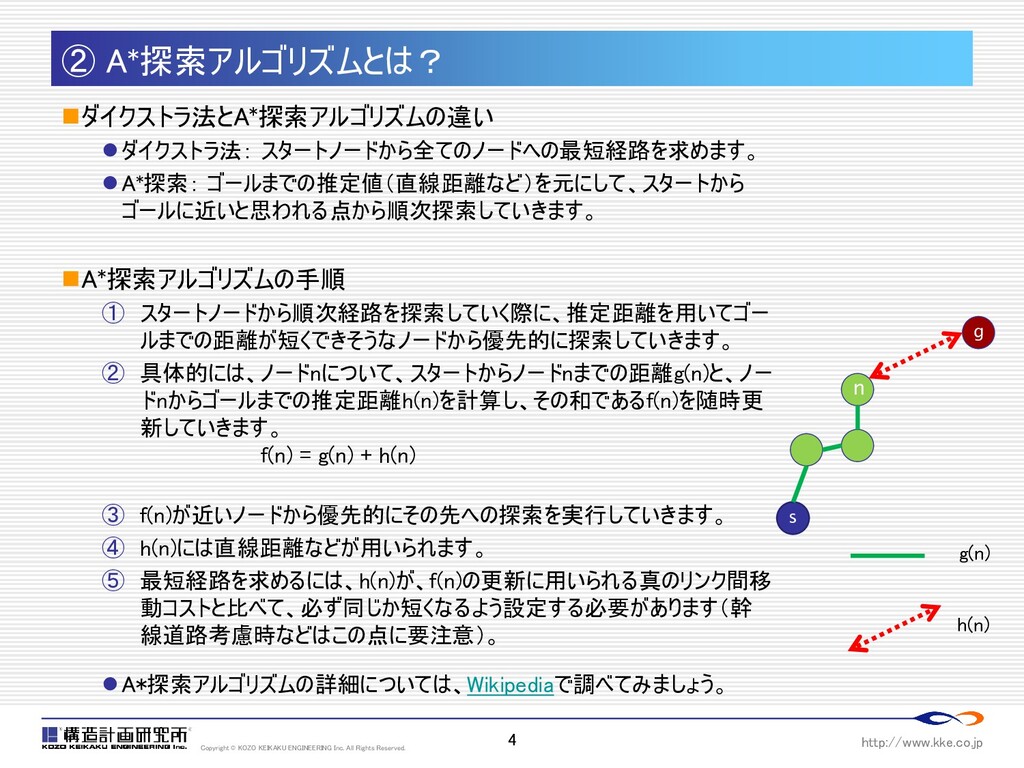
② A*探索アルゴリズムとは?
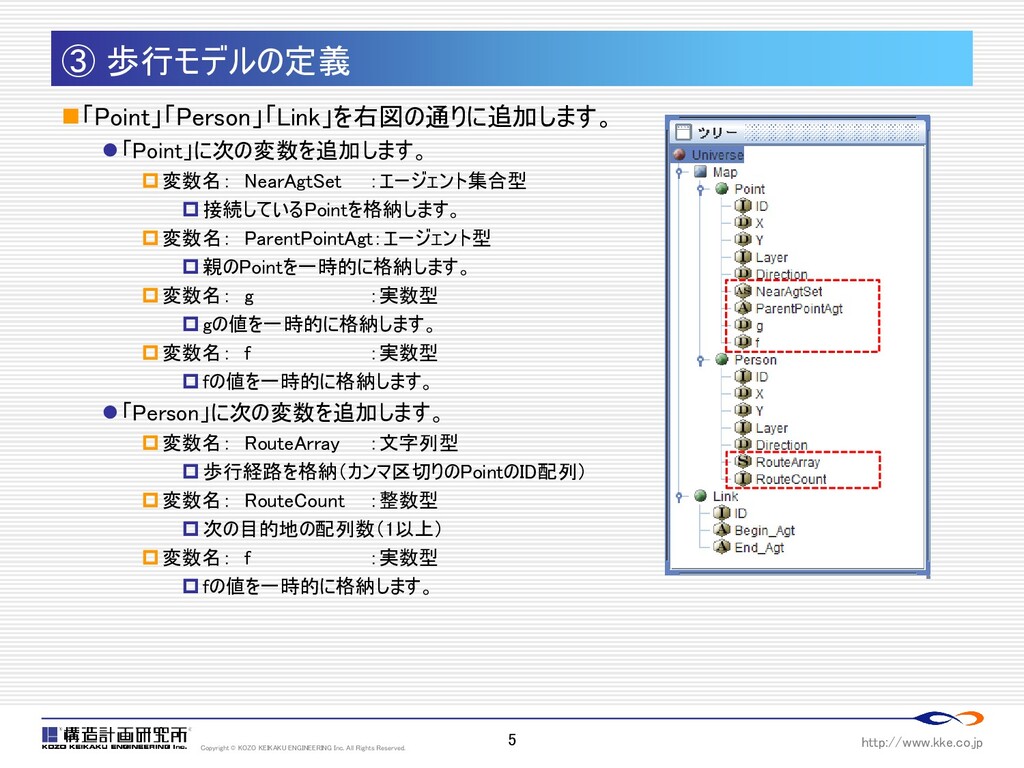
③ 歩行モデルの定義
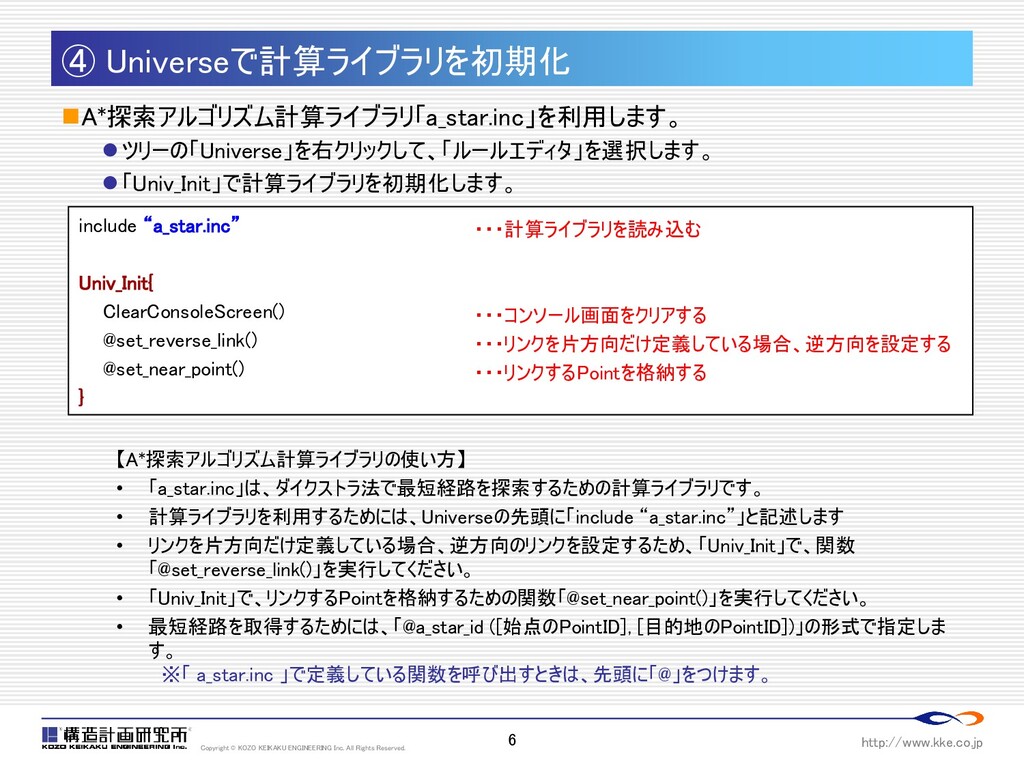
④ Universeで計算ライブラリを初期化
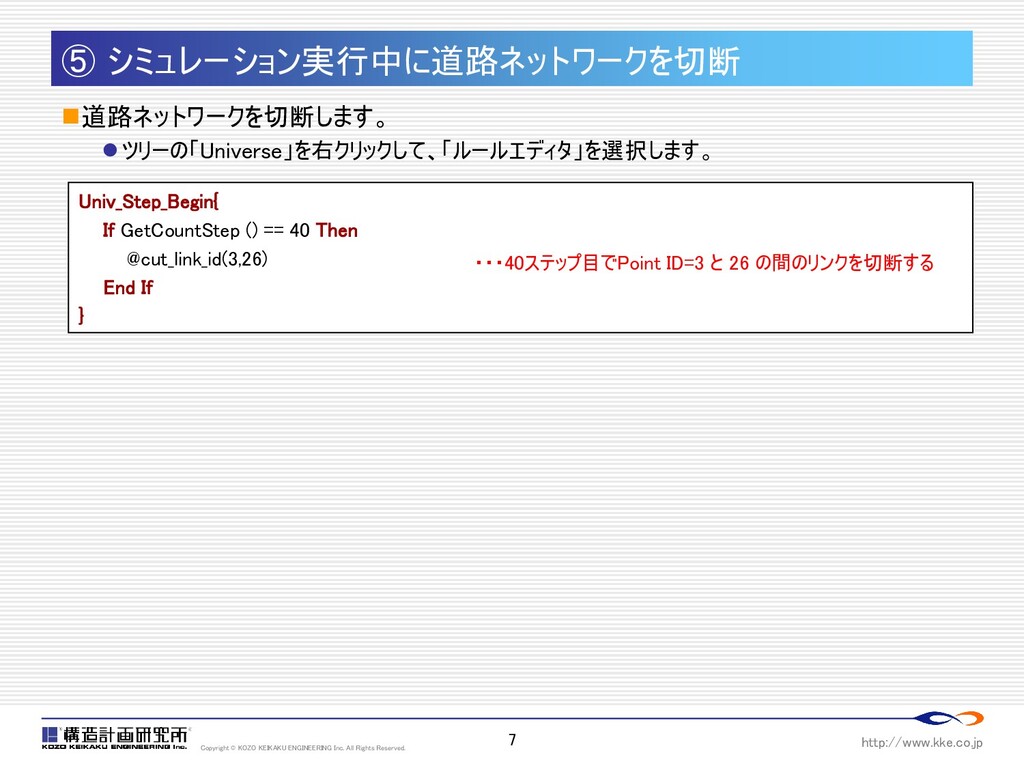
⑤ シミュレーション実行中に道路ネットワークを切断
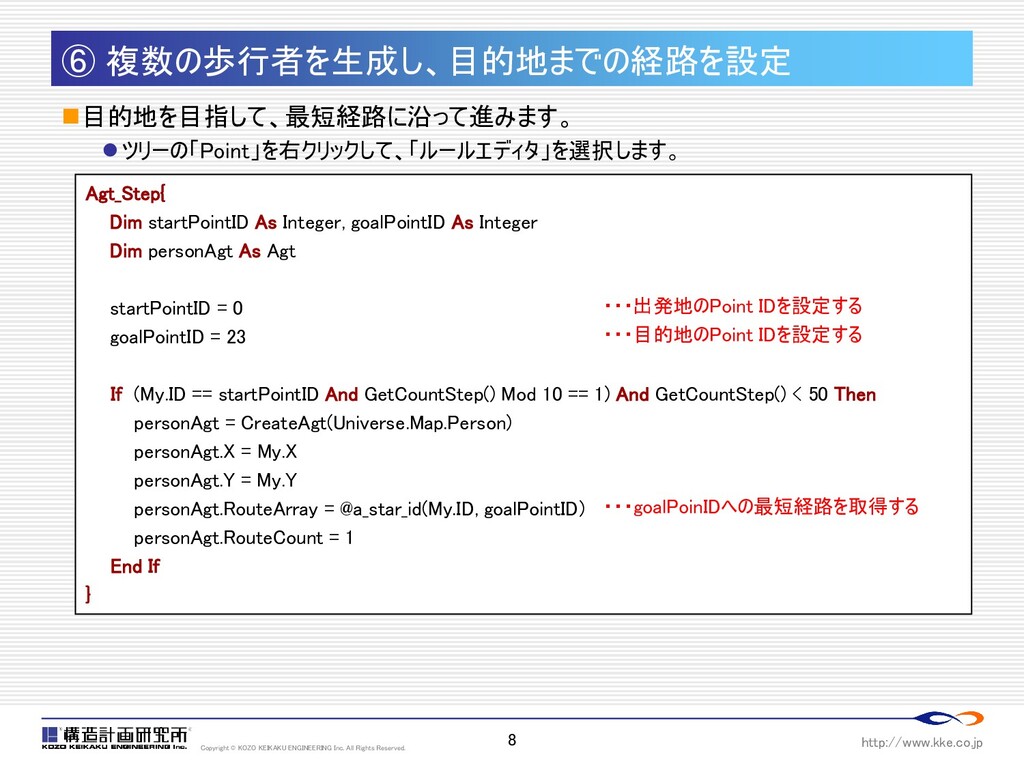
⑥ 複数の歩行者を生成し、目的地までの経路を設定
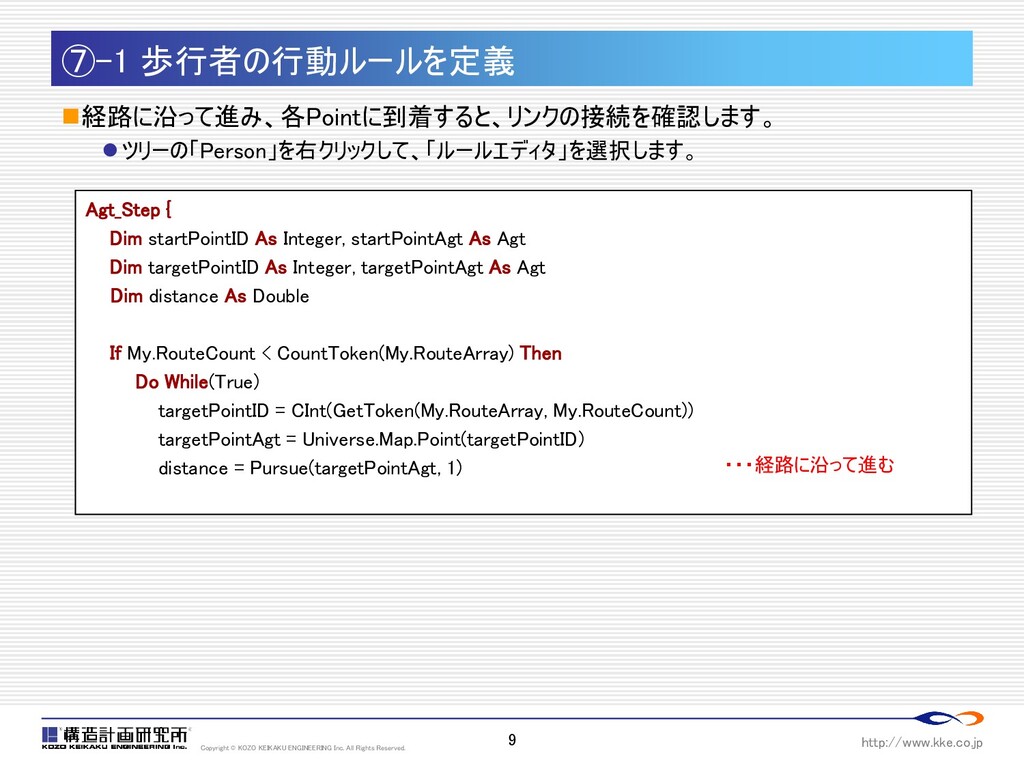
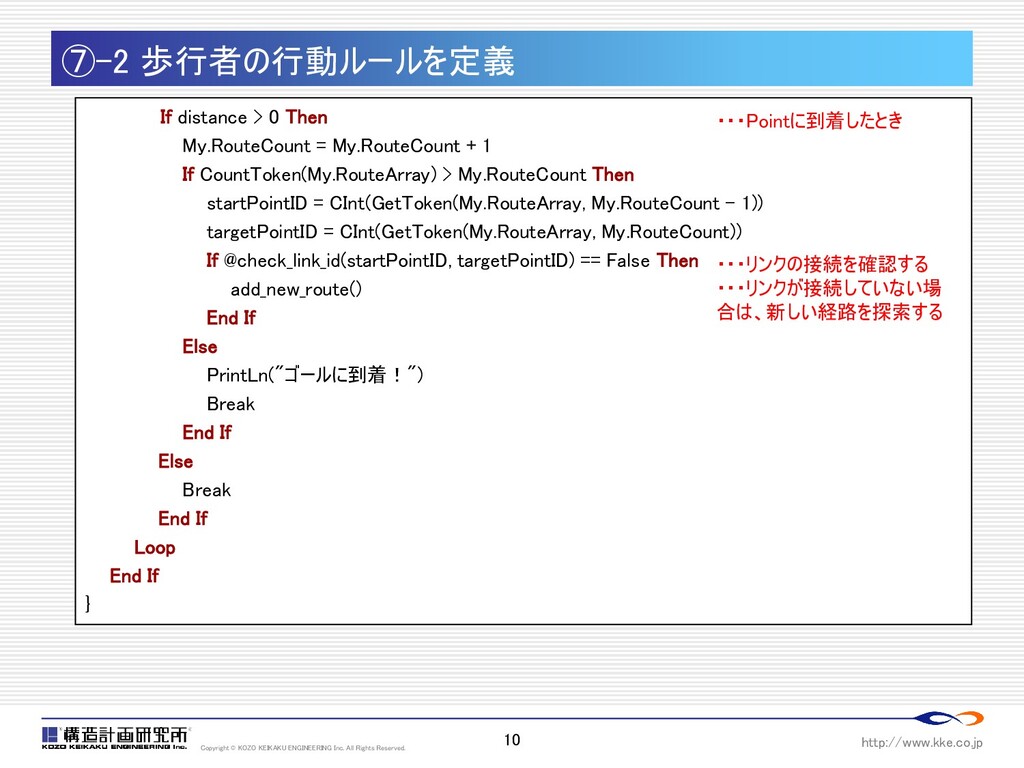
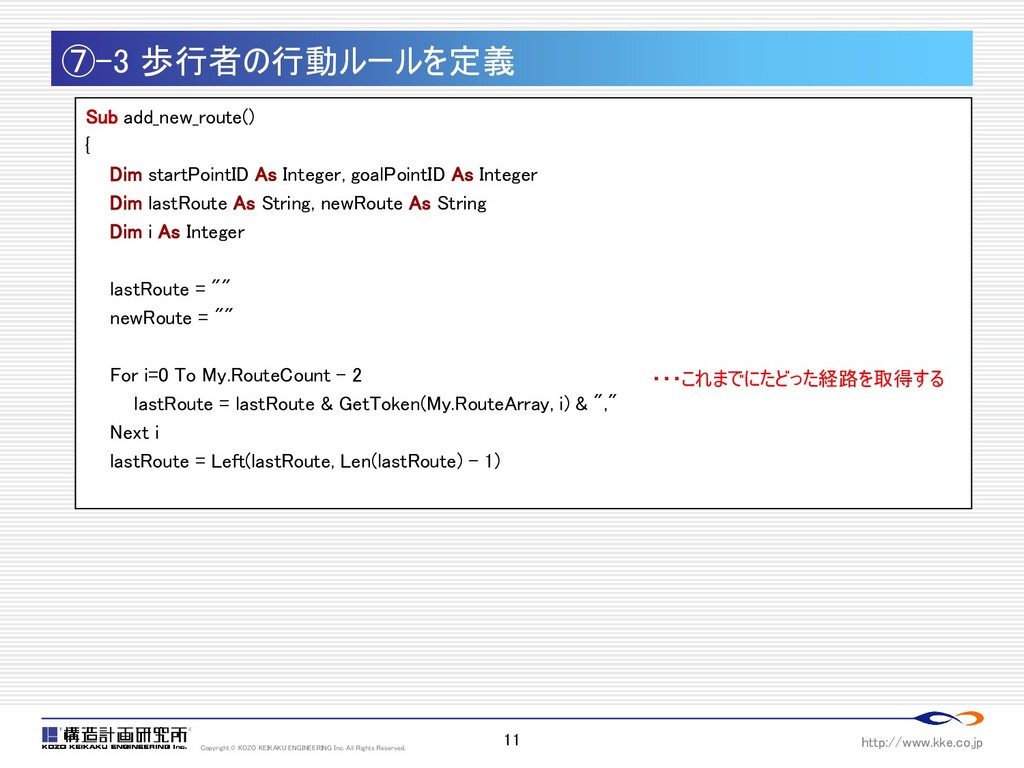
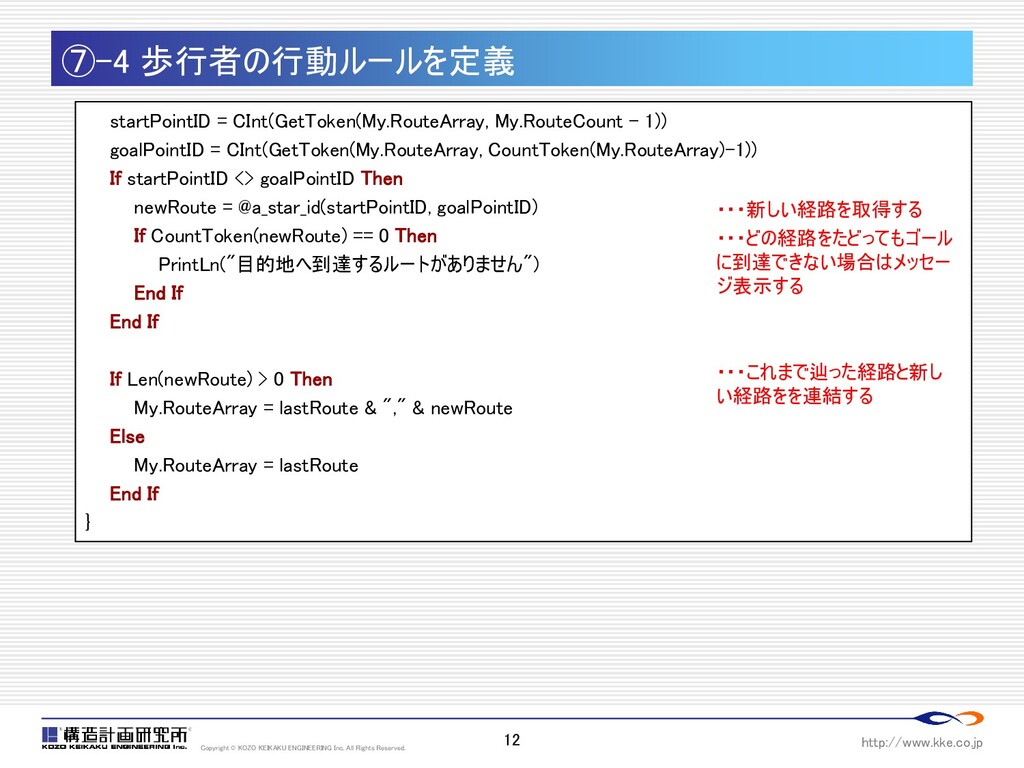
⑦ 歩行者の行動ルールを定義
⑧ 道路の拡張
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}