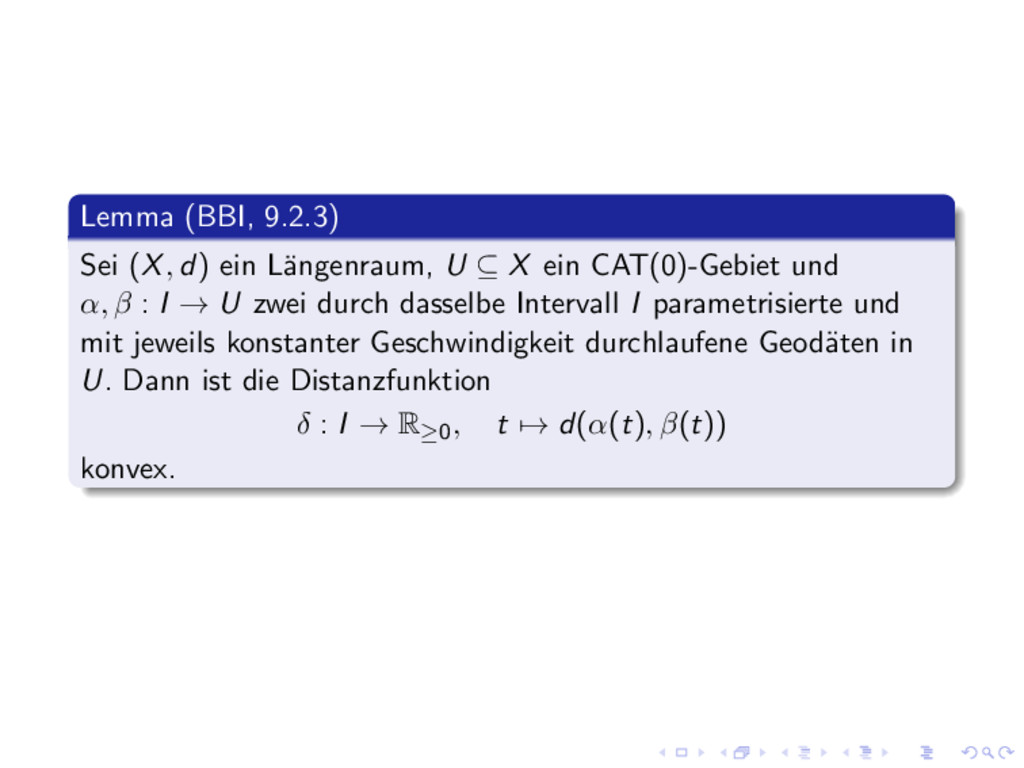
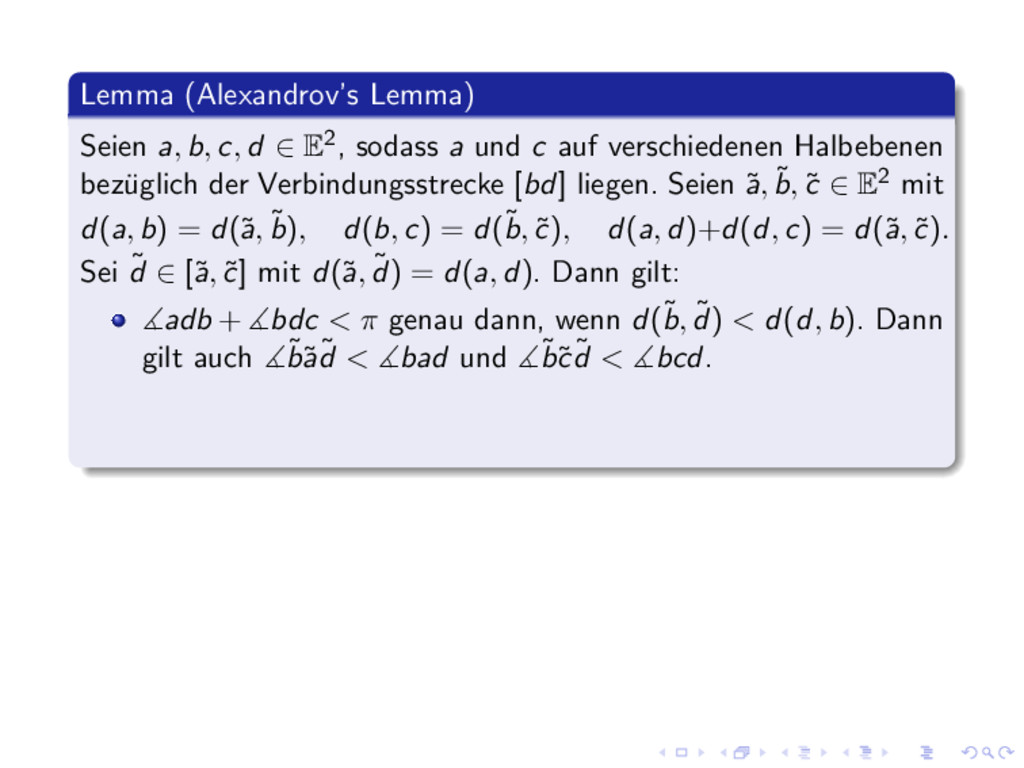
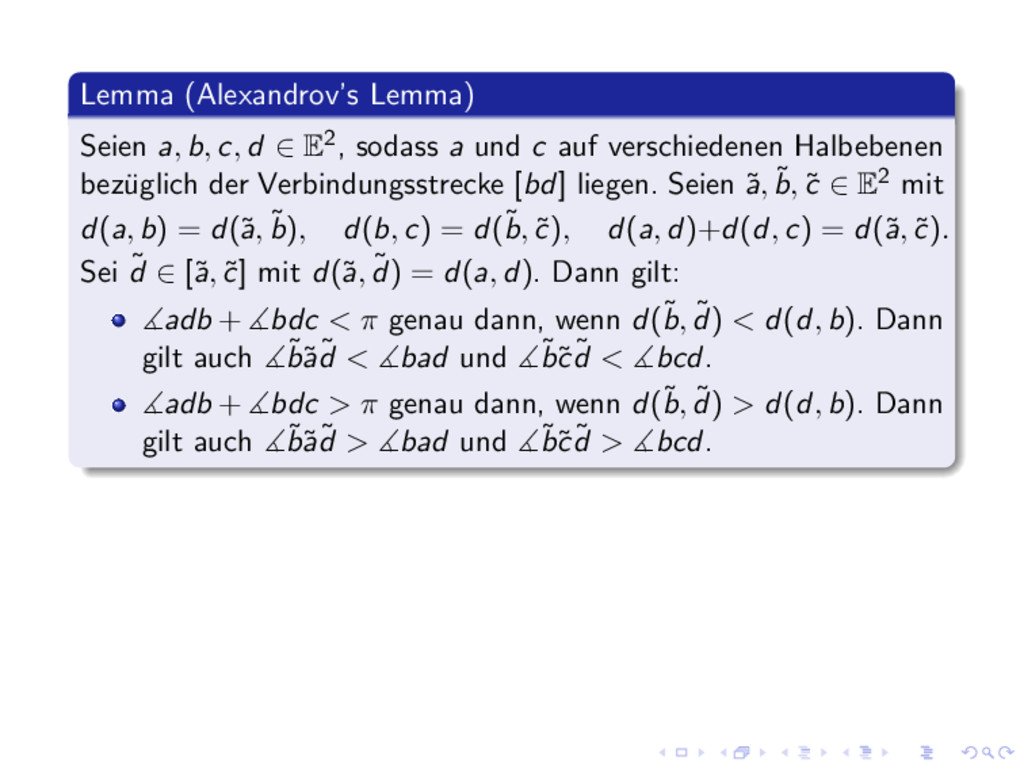
2 , sodass a und c auf verschiedenen Halbebenen bez¨ uglich der Verbindungsstrecke [bd] liegen. Seien ˜ a, ˜ b, ˜ c 2 E 2 mit d(a, b) = d(˜ a, ˜ b), d(b, c) = d(˜ b, ˜ c), d(a, d)+d(d, c) = d(˜ a, ˜ c). Sei ˜ d 2 [˜ a, ˜ c] mit d(˜ a, ˜ d) = d(a, d). Dann gilt: ]adb + ]bdc < ⇡ genau dann, wenn d(˜ b, ˜ d) < d(d, b). Dann gilt auch ]˜ b˜ a˜ d < ]bad und ]˜ b˜ c˜ d < ]bcd. ]adb + ]bdc > ⇡ genau dann, wenn d(˜ b, ˜ d) > d(d, b). Dann gilt auch ]˜ b˜ a˜ d > ]bad und ]˜ b˜ c˜ d > ]bcd. Lemma Sei (X, d) ein L¨ angenraum, abc ein Dreieck in X und d 2 Bild( ac ). Wenn die Teildreiecke abd und cbd die CAT(0)-Vergleichseigenschaft erf¨ ullen, dann auch abc.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}