Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
公大高専土井研_なかチャレシンポ20230121
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
Tmhr_Doi
January 21, 2023
Technology
150
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
公大高専土井研_なかチャレシンポ20230121
Tmhr_Doi
January 21, 2023
More Decks by Tmhr_Doi
See All by Tmhr_Doi
Slide for Conference: TSUKUBA Challenge 2020
tmdoi
0
790
府大高専チームの現状・つくばチャレンジ2020第2回LT大会
tmdoi
0
1k
府大高専チーム自己紹介・つくばチャレンジ2020第1回LT大会
tmdoi
0
990
Other Decks in Technology
See All in Technology
探索・可視化・自動化を一本化 Amazon Quickでデータ活用スピードを上げる方法
koheiyoshikawa
0
120
AIが実装を自走する時代の認知負債との戦い
lycorptech_jp
PRO
2
940
タスクの複雑さでモデルを選ぶ ── Thompson Samplingで動かす“トークン/コスト最適化
satohy0323
0
590
データエンジニアリングとドメイン駆動設計
masuda220
PRO
7
1.1k
プロダクト開発組織の現在地(Ver.2026/07) / product-organization
kaonavi
0
130
10年目を迎えた「ABEMA」がどのように AI 活用を推進して、AI 駆動開発にシフトしているのか / How ABEMA, entering its 10th year, is promoting the use of AI and shifting toward AI-driven development
miyukki
0
310
SREとQA 二人三脚で進めるSLO運用/sre-qa-slo
sugitak
0
1.1k
AI x 開発生産性を取り巻く予算戦略と投資対効果
i35_267
2
950
Network Firewallやっていき!
news_it_enj
0
170
全員がリーダーである世界へ キリマンジャロ登頂とシェアド・リーダー
jinwatanabe
0
110
AI Native なプロダクト組織の立ち上げ方 : 生産性 100 倍への挑戦
mikesorae
0
420
伝票作成AIエージェントを支える、LLMOpsとインフラの選択肢 / AICon2026_takeda
rakus_dev
0
210
Featured
See All Featured
How to make the Groovebox
asonas
2
2.3k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.6k
From Legacy to Launchpad: Building Startup-Ready Communities
dugsong
0
270
Done Done
chrislema
186
16k
Unsuck your backbone
ammeep
672
58k
Effective software design: The role of men in debugging patriarchy in IT @ Voxxed Days AMS
baasie
0
450
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
Redefining SEO in the New Era of Traffic Generation
szymonslowik
1
360
The agentic SEO stack - context over prompts
schlessera
0
850
Darren the Foodie - Storyboard
khoart
PRO
3
3.4k
Six Lessons from altMBA
skipperchong
29
4.3k
The Straight Up "How To Draw Better" Workshop
denniskardys
239
140k
Transcript
⼤阪公⽴⼤学⾼専 ⼟井研究室チームの活動報告 ―2020年度から2022年度まで― 公⽴⼤学法⼈⼤阪 ⼤阪公⽴⼤学⼯業⾼等専⾨学校 ⼟井研究室 ◦⼟井智晴 梅阪稜⾺ 清家陸翔 ⾹川恭碩
⼤⻄智輝 兵頭元晴 ⼤坪憲弘 古賀健朗
2020 つくばチャレンジ オンライン参加
None
None
None
None
2021 中之島チャレンジ 初参加 項⽬ 諸元 全⻑×全幅×全⾼ 550×540×720[mm] 重量 21.9[kg] コントローラ
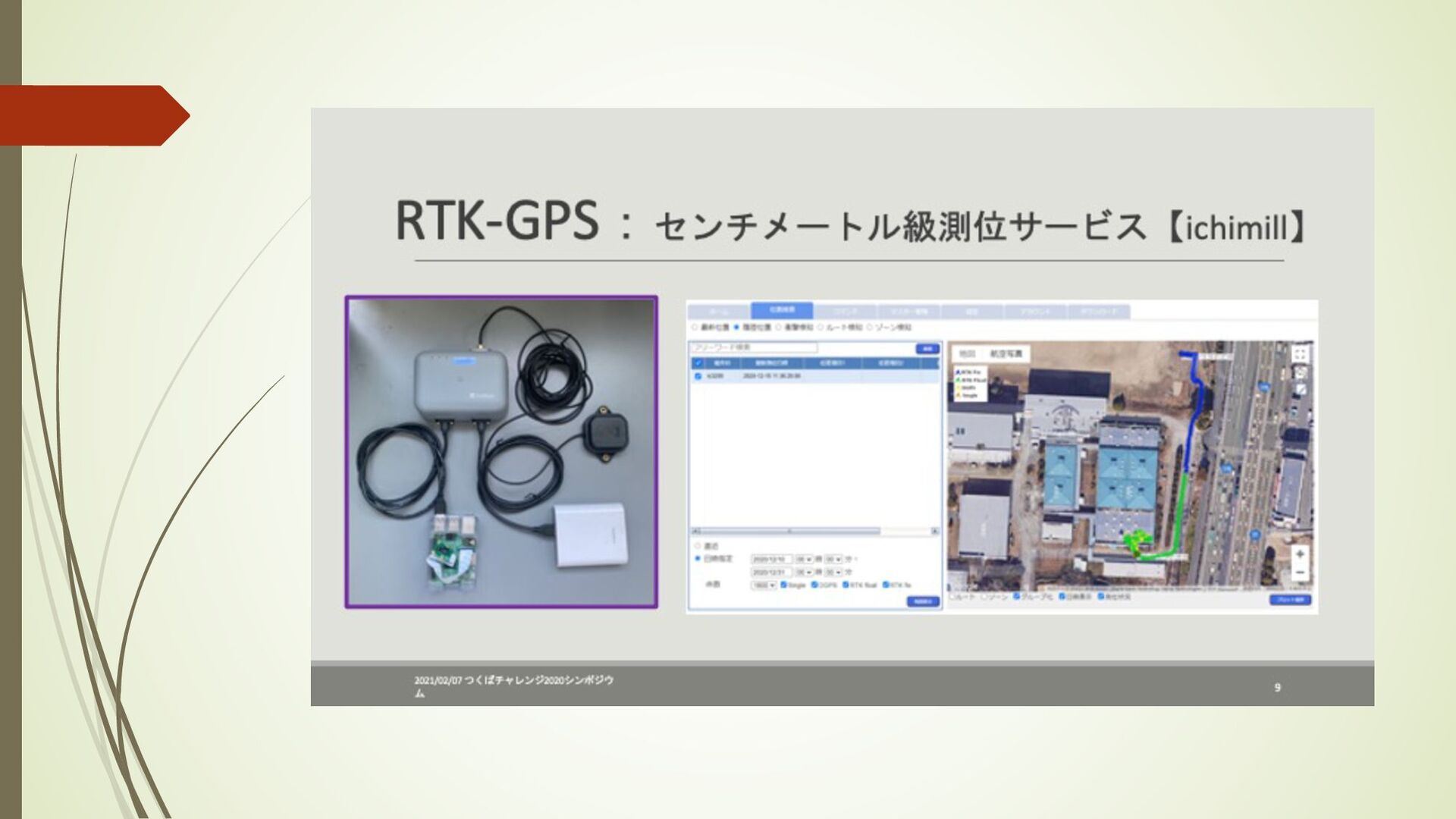
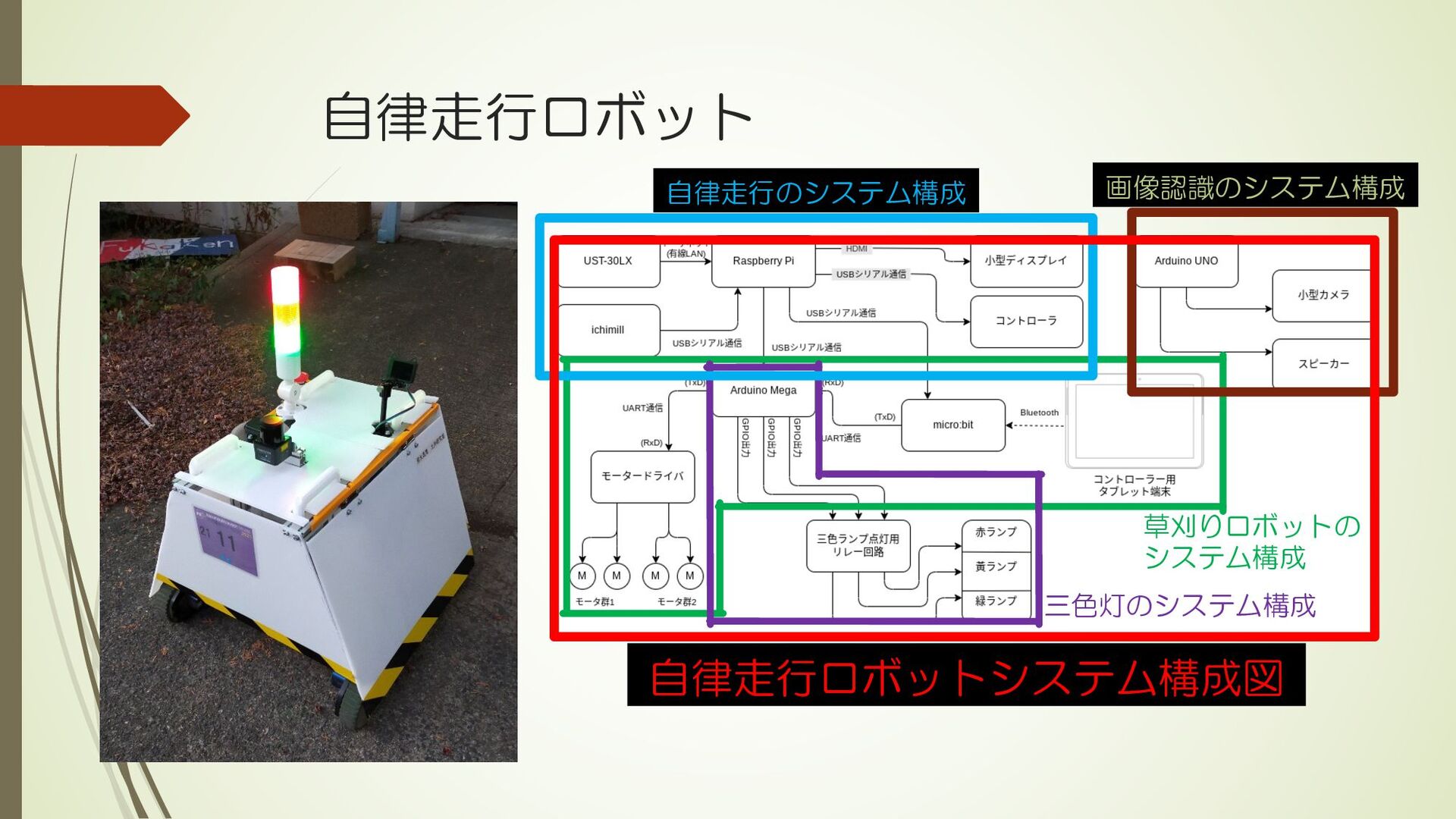
micro:bit(拡張基板), Androidタブレット, 有線USBコントローラ, Raspberry Pi(⾃律制御) マイコン micro:bit, Arduino,RaspberryPi 無線通信⽅法 Bluetooth GPS ichimill 2次元測位センサ UST-30LX 自律走行ロボット仕様
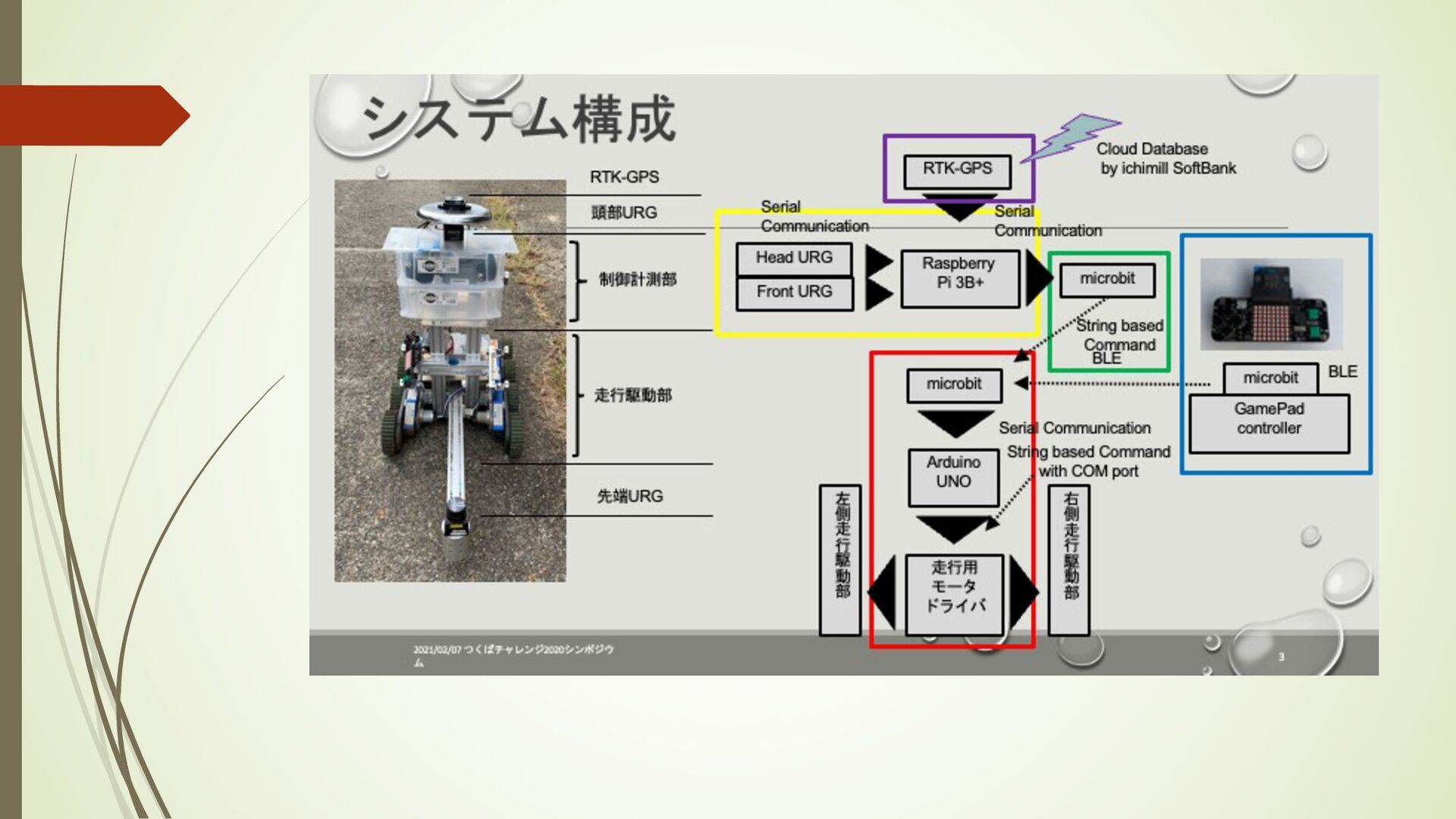
自律走行ロボット 自律走行ロボットシステム構成図 草刈りロボットの システム構成 三色灯のシステム構成 画像認識のシステム構成 自律走行のシステム構成
GPSのみでの自律走行の方法 高精度 測位 システム 基 地 局 補正 情報 Real
Time Kinematic 測位(相対測位) 誤差 数cm! SoftBank-ichimill 補正情報を受けて 位置情報を補正
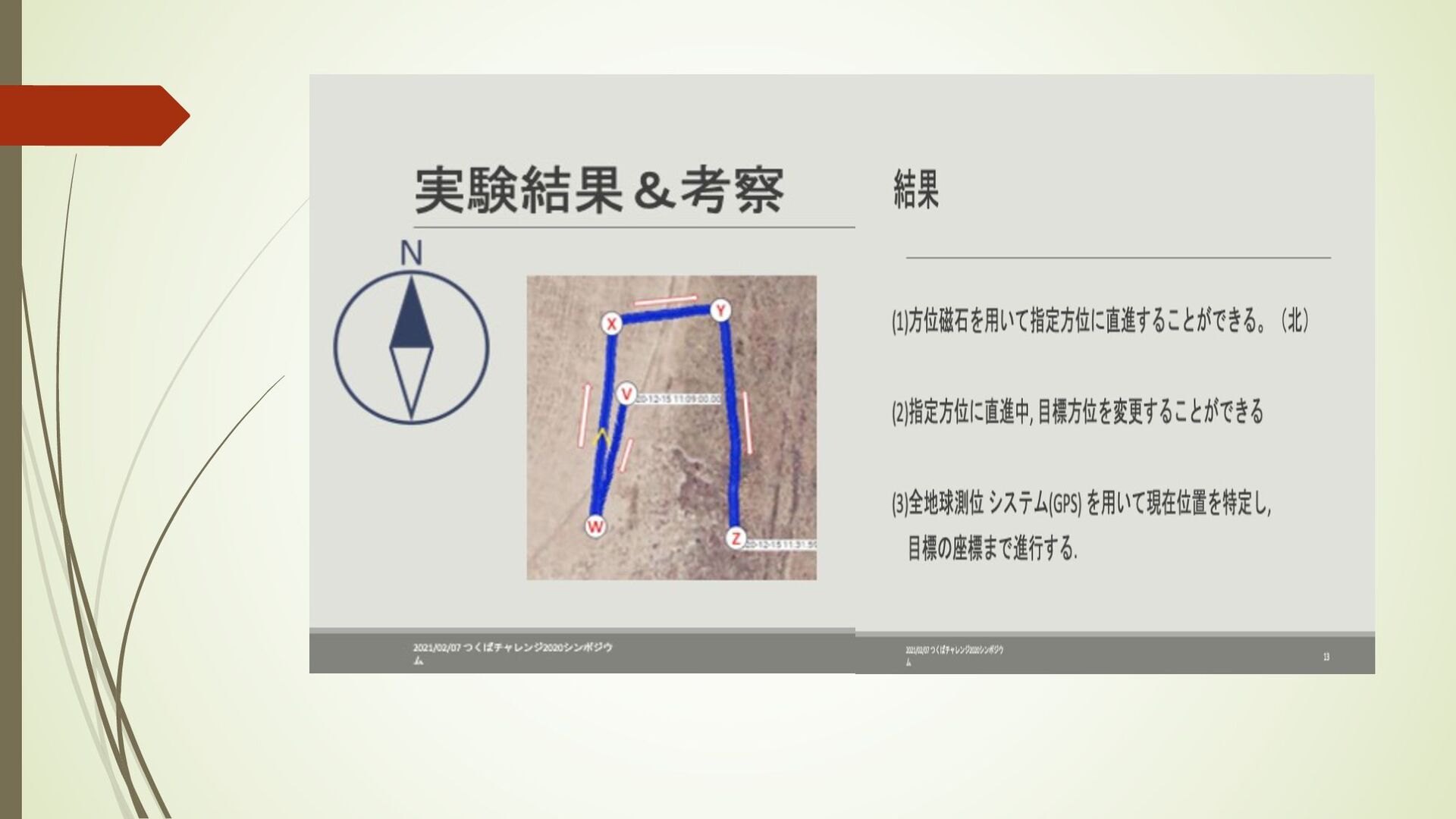
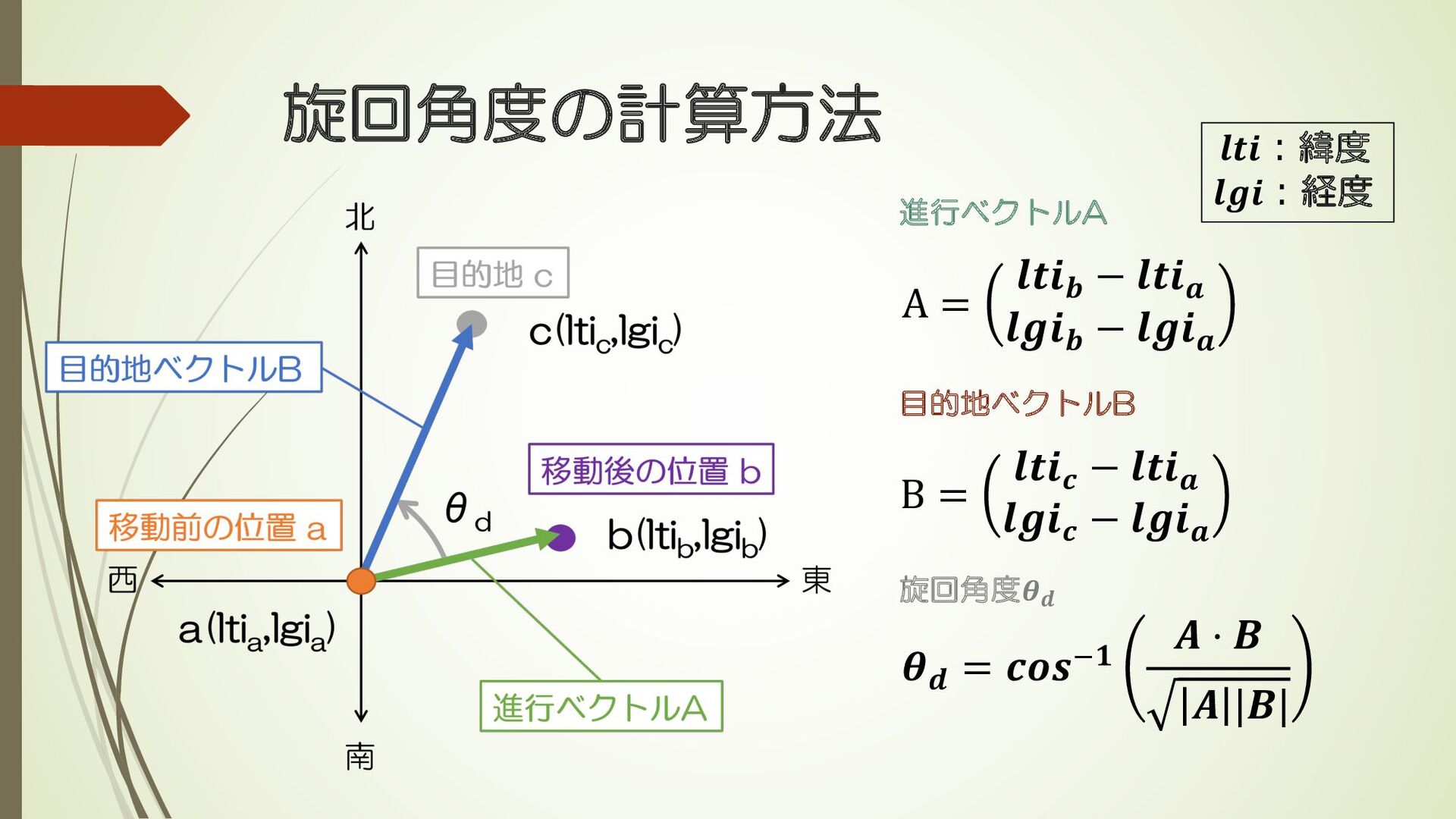
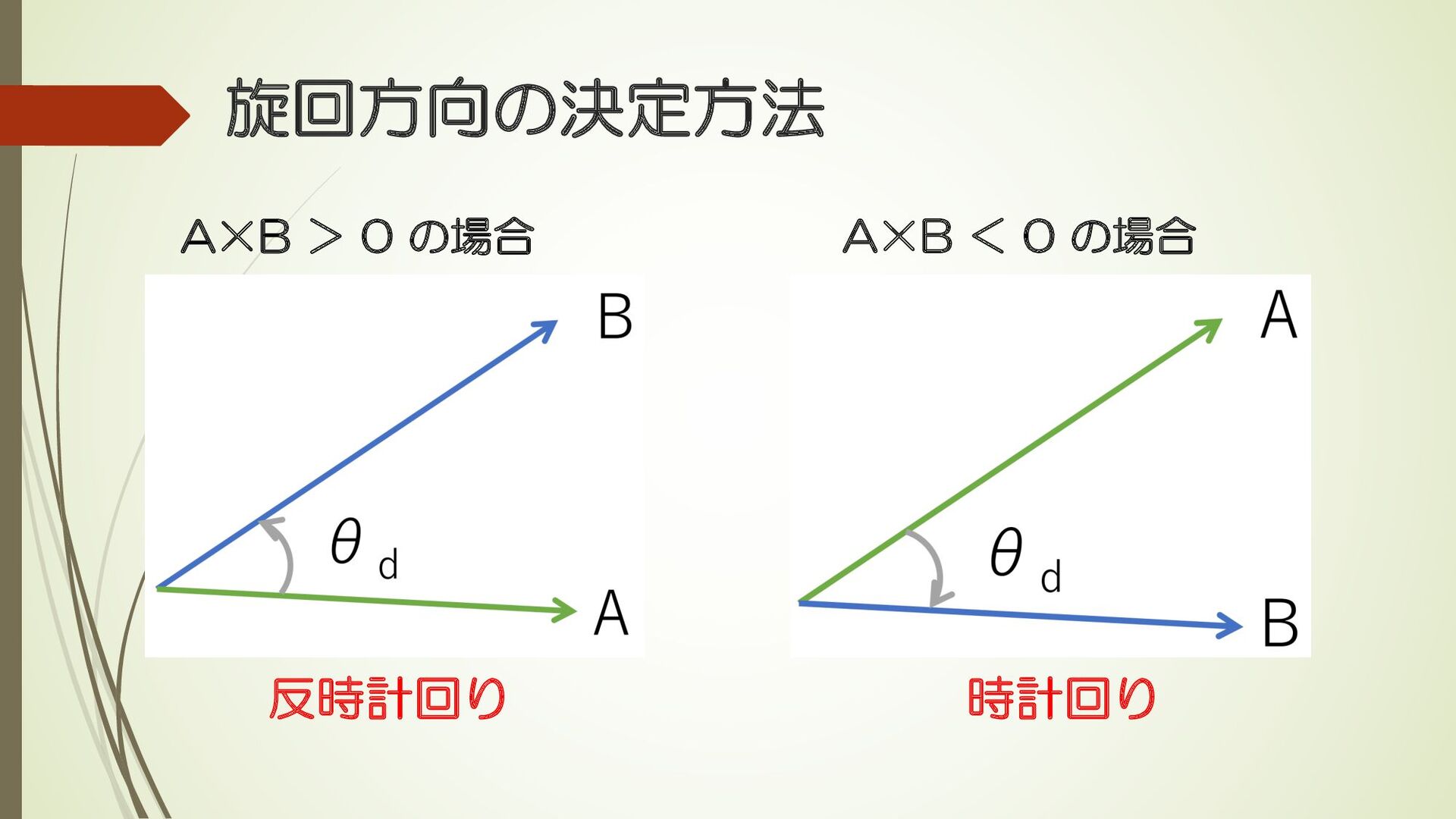
旋回角度の計算方法 進行ベクトルA A = 𝒍𝒕𝒊𝒃 − 𝒍𝒕𝒊𝒂 𝒍𝒈𝒊𝒃 − 𝒍𝒈𝒊𝒂
目的地ベクトルB B = 𝒍𝒕𝒊𝒄 − 𝒍𝒕𝒊𝒂 𝒍𝒈𝒊𝒄 − 𝒍𝒈𝒊𝒂 旋回角度𝜽𝒅 𝜽𝒅 = 𝒄𝒐𝒔&𝟏 𝑨 ⋅ 𝑩 𝑨 |𝑩| 𝒍𝒕𝒊︓緯度 𝒍𝒈𝒊︓経度
旋回方向の決定方法 A×B > 0 の場合 反時計回り A×B < 0 の場合
時計回り
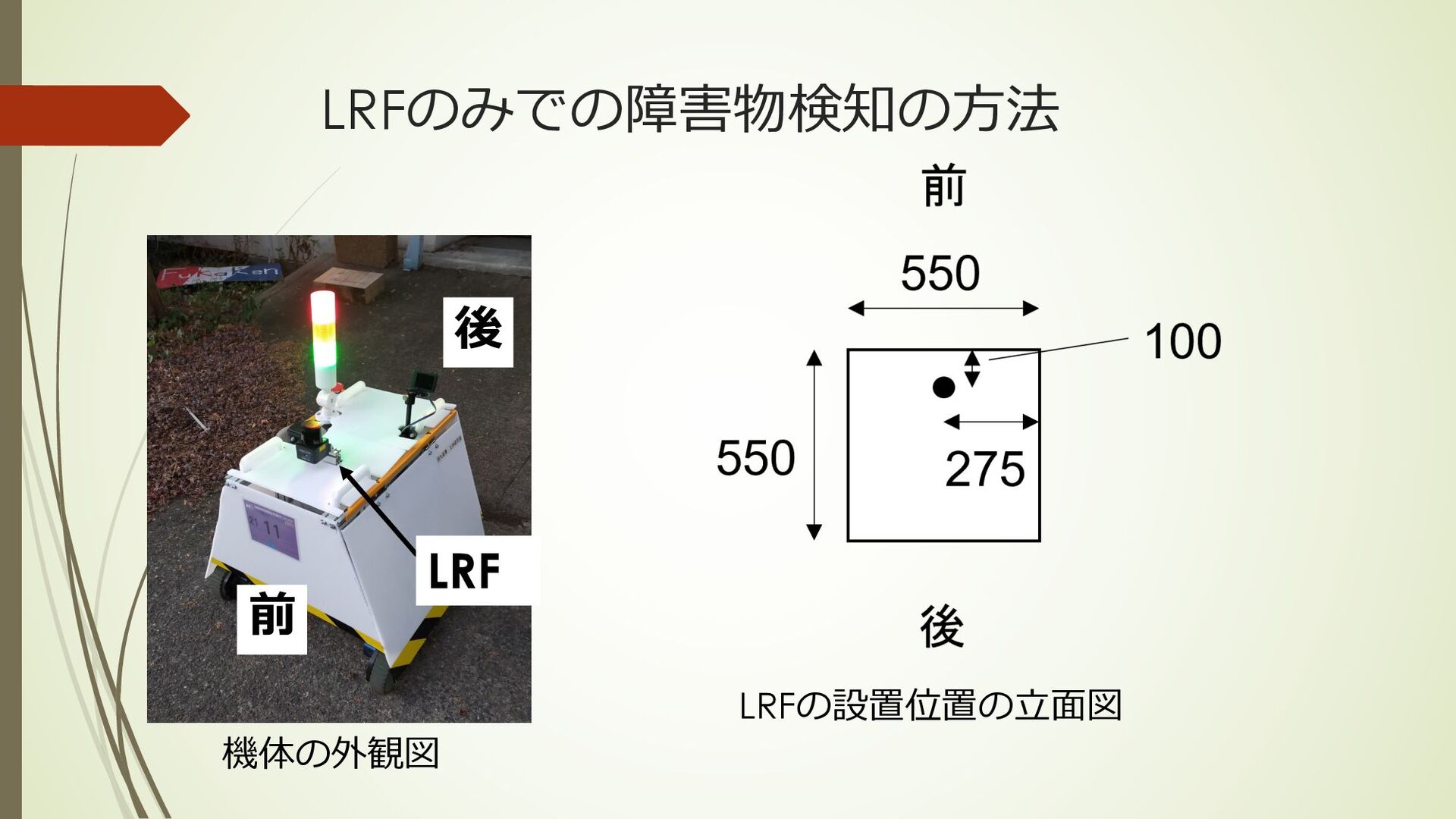
LRFのみでの障害物検知の⽅法 前 後 LRF LRFの設置位置の⽴⾯図 機体の外観図
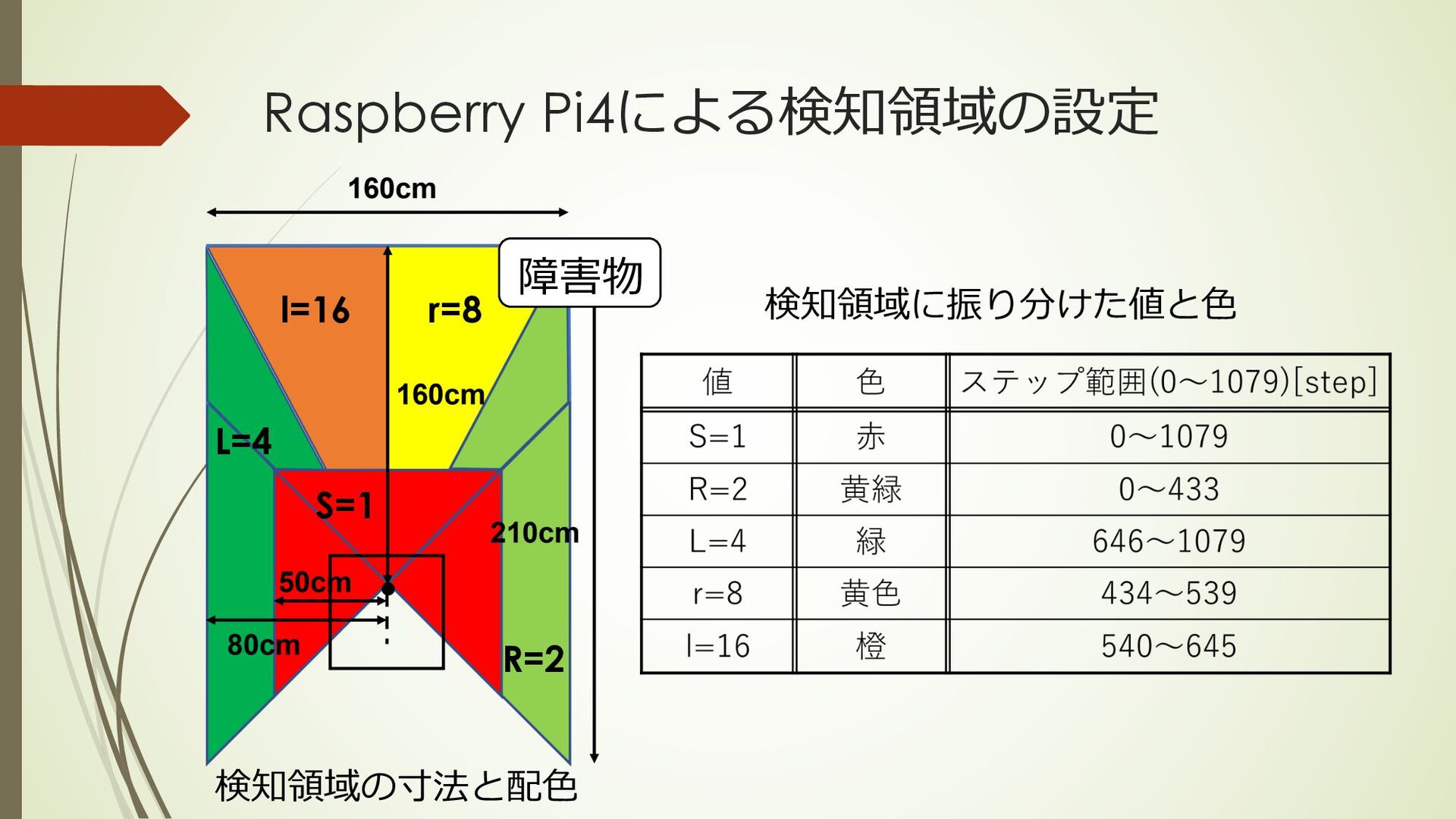
Raspberry Pi4による検知領域の設定 検知領域に振り分けた値と⾊ 検知領域の⼨法と配⾊ S=1 R=2 L=4 r=8 l=16 障害物
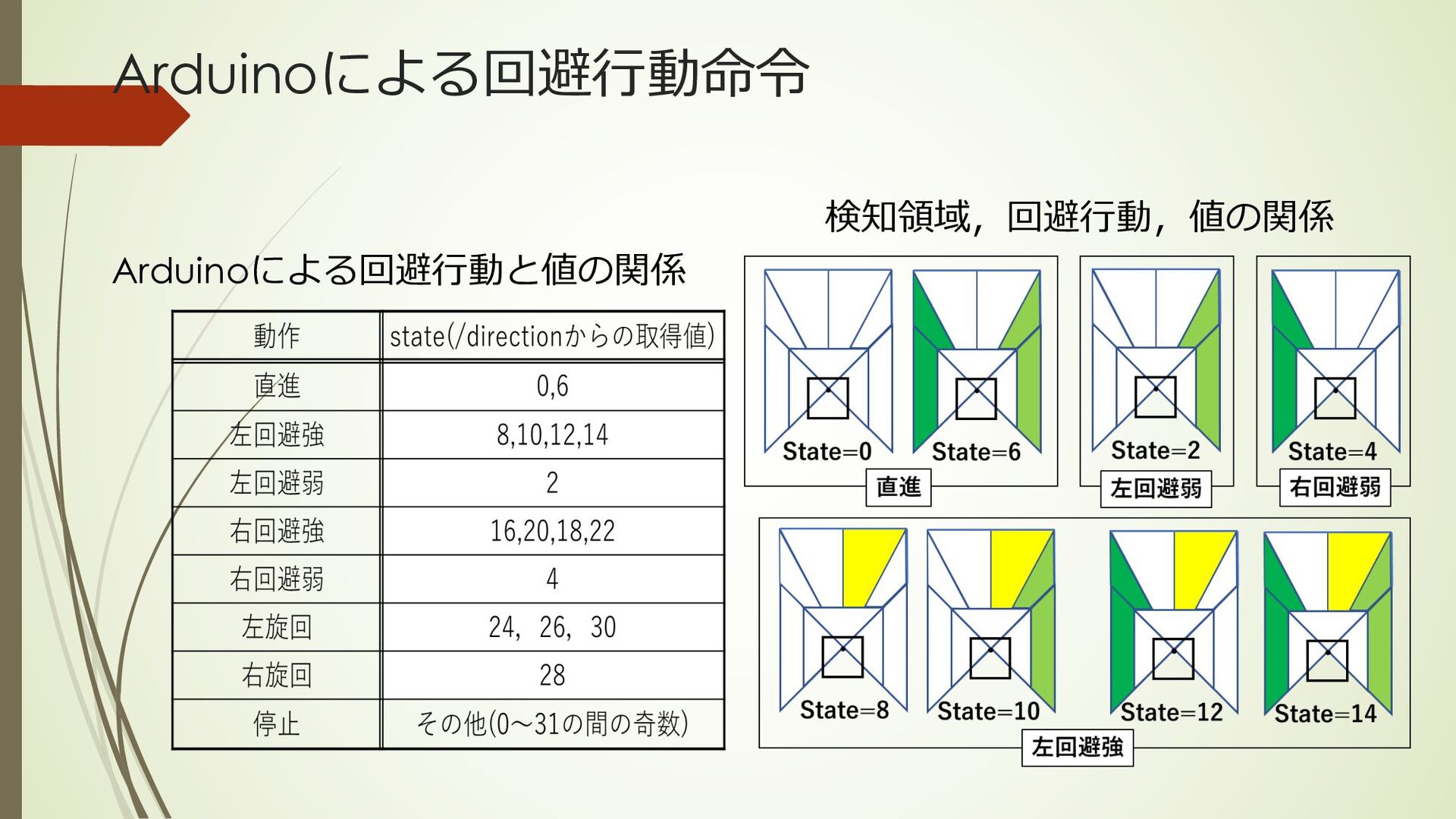
Arduinoによる回避⾏動命令 Arduinoによる回避⾏動と値の関係 検知領域,回避⾏動,値の関係
中之島 チャレンジ 動画 動画撮影を 行った箇所 15/2 0
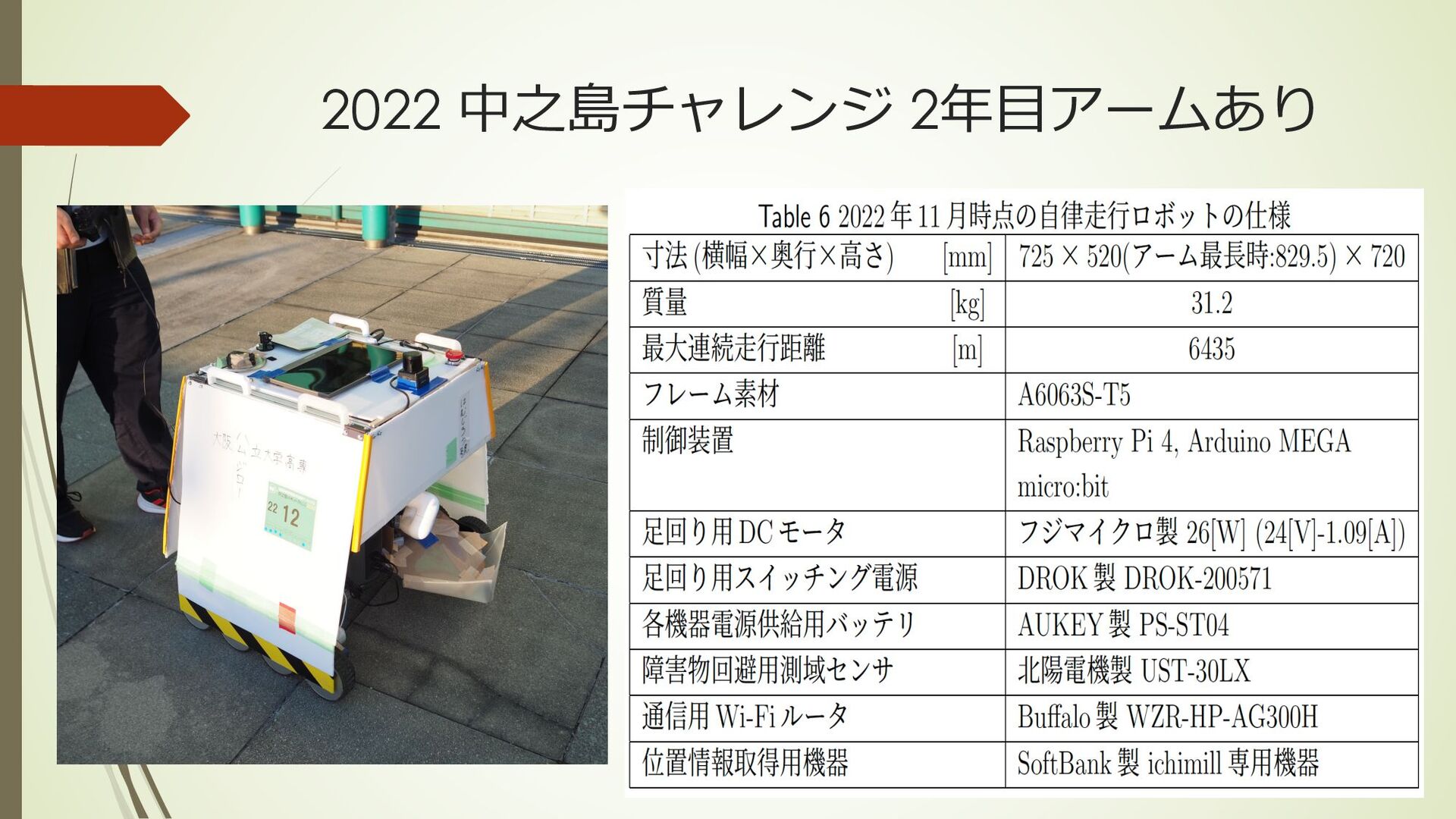
2022 中之島チャレンジ 2年⽬アームあり
内容量拡⼤と制御回路の整理
2022年度の⾃律⾛⾏結果 中之島チャレンジ 中之島チャレンジ エクストラチャレンジ
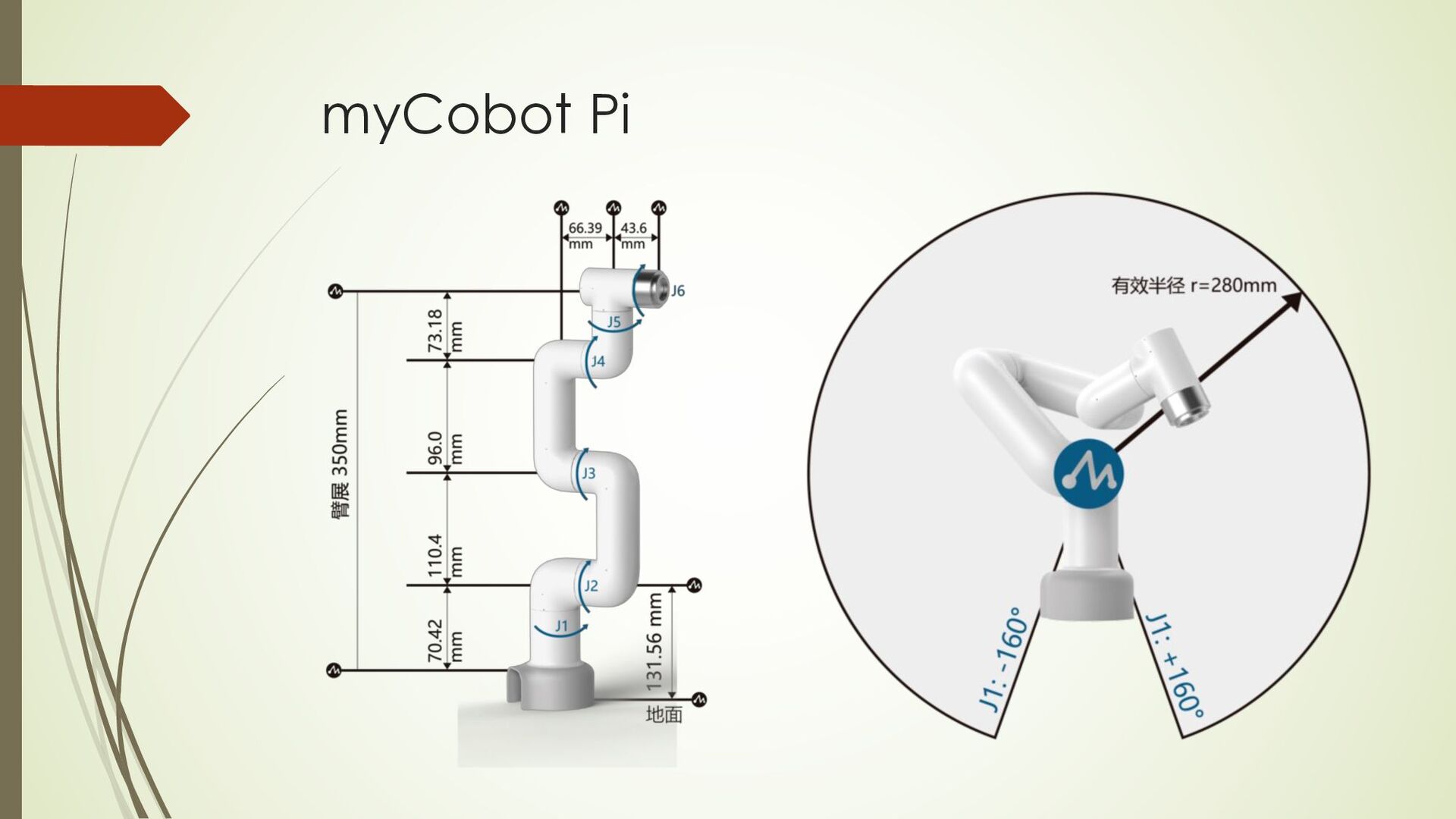
myCobot Pi
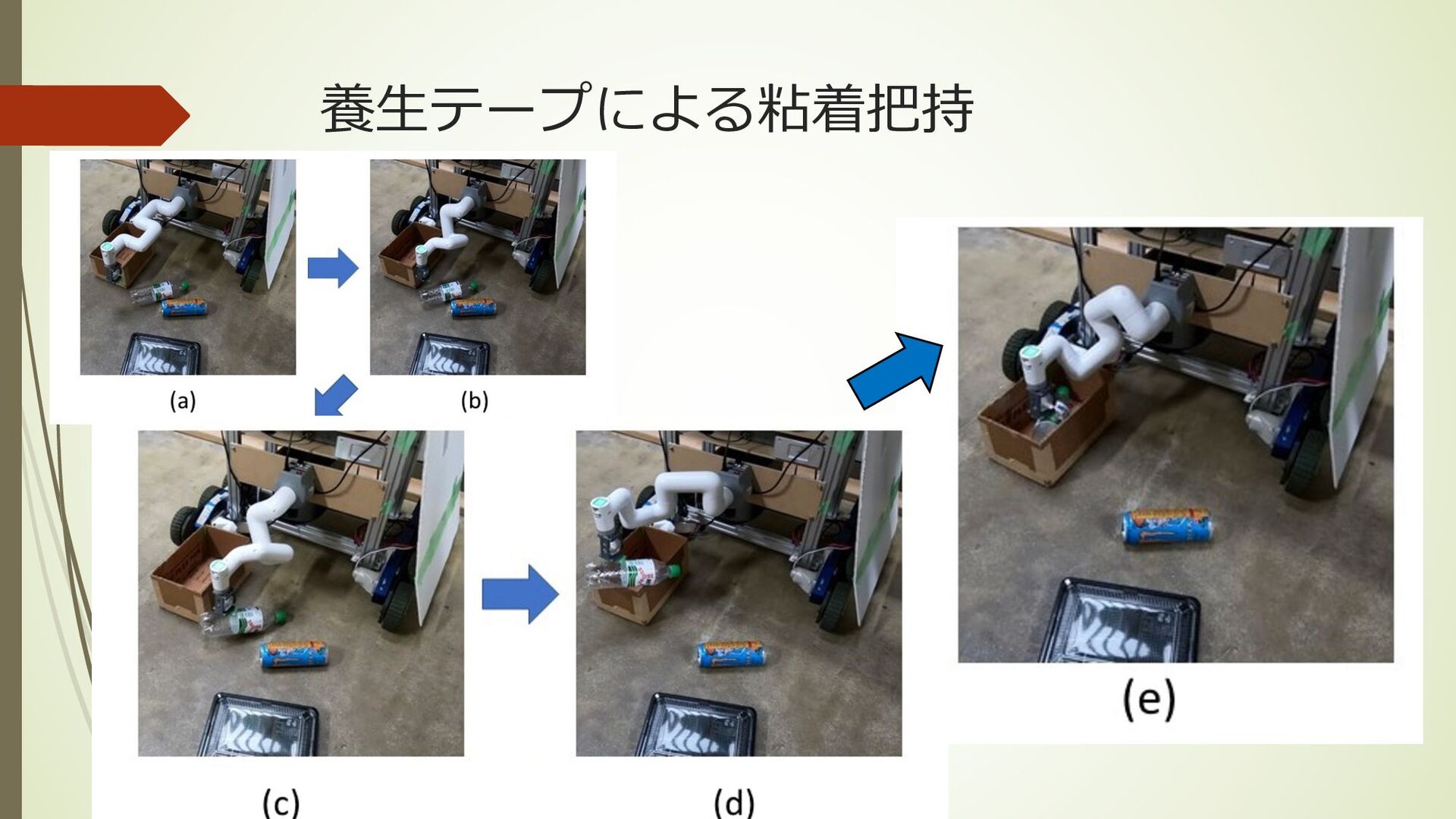
養⽣テープによる粘着把持
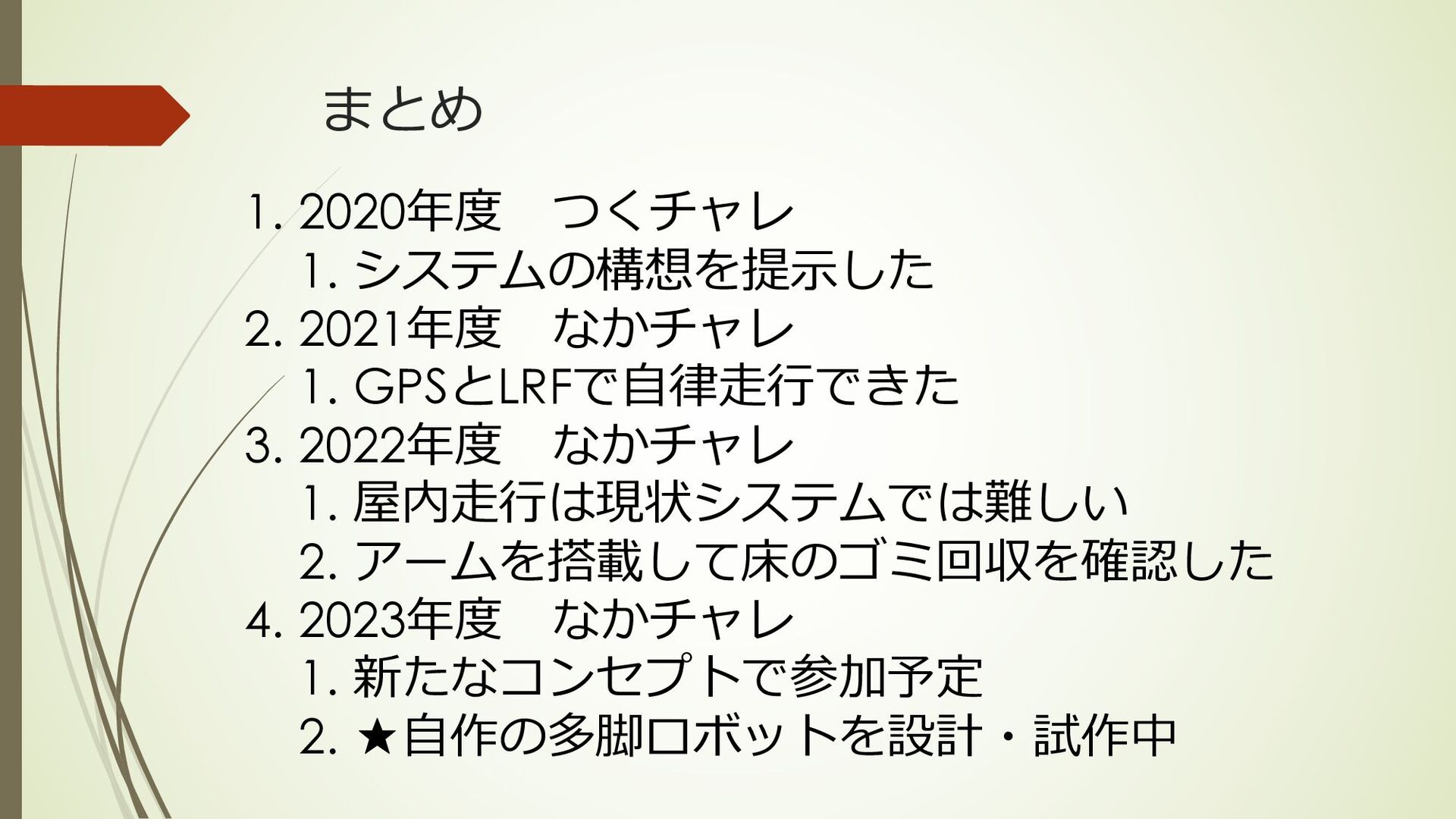
まとめ 1. 2020年度 つくチャレ 1. システムの構想を提⽰した 2. 2021年度 なかチャレ 1.
GPSとLRFで⾃律⾛⾏できた 3. 2022年度 なかチャレ 1. 屋内⾛⾏は現状システムでは難しい 2. アームを搭載して床のゴミ回収を確認した 4. 2023年度 なかチャレ 1. 新たなコンセプトで参加予定 2. ★⾃作の多脚ロボットを設計・試作中
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![2021 中之島チャレンジ 初参加 項⽬ 諸元 全⻑×全幅×全⾼ 550×540×720[mm] 重量 21.9[kg] コントローラ](https://files.speakerdeck.com/presentations/4248169a1330435cb70bce37bff36c2c/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}