« Can you train an eye in the sky? »
Avec cette accroche, le laboratoire de science et technologie de défense britannique (DSTL) a sollicité la communauté Kaggle sur la problématique de la génération de cartes à partir d’images satellites multispectrales WorldView-3.
Reconnaître des chats sur internet d’accord, mais produire des plans depuis des images satellites ? C’est possible ?
tuile_chat.png
Lors de cette présentation, Victor Fomin et Thomas Soumarmon nous feront un retour d’expérience sur les différentes étapes qu’ils ont du franchir et les solutions mises en œuvre lors de cette compétition.
Au programme de ce ReX :
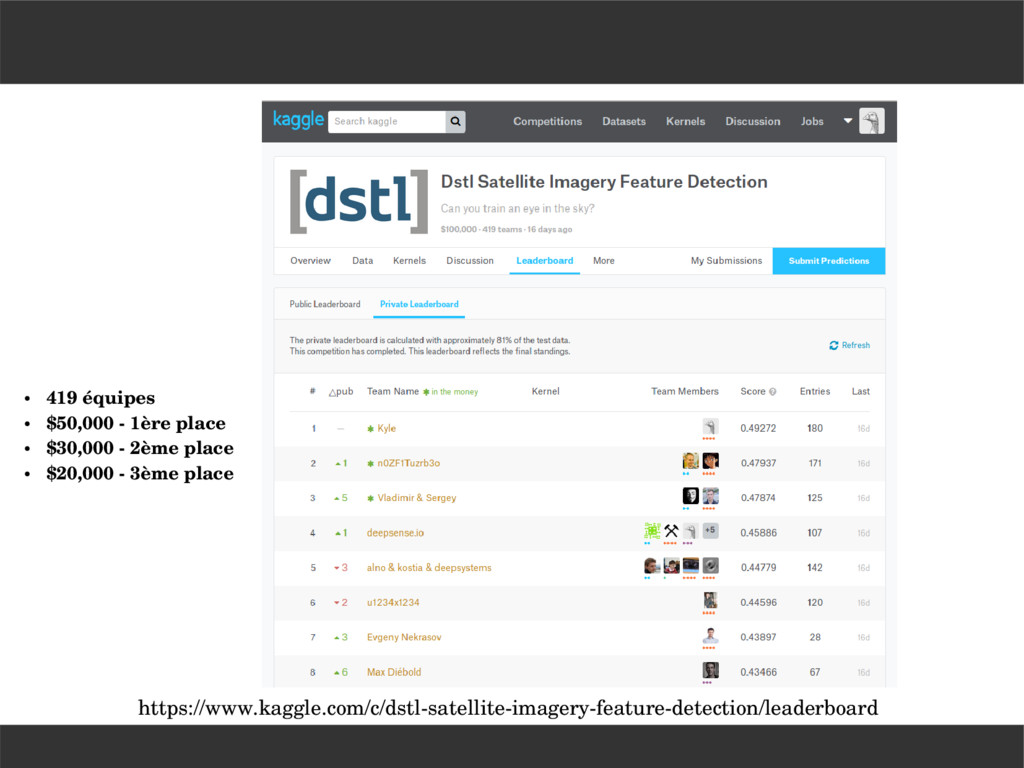
* une compétition à $100.000
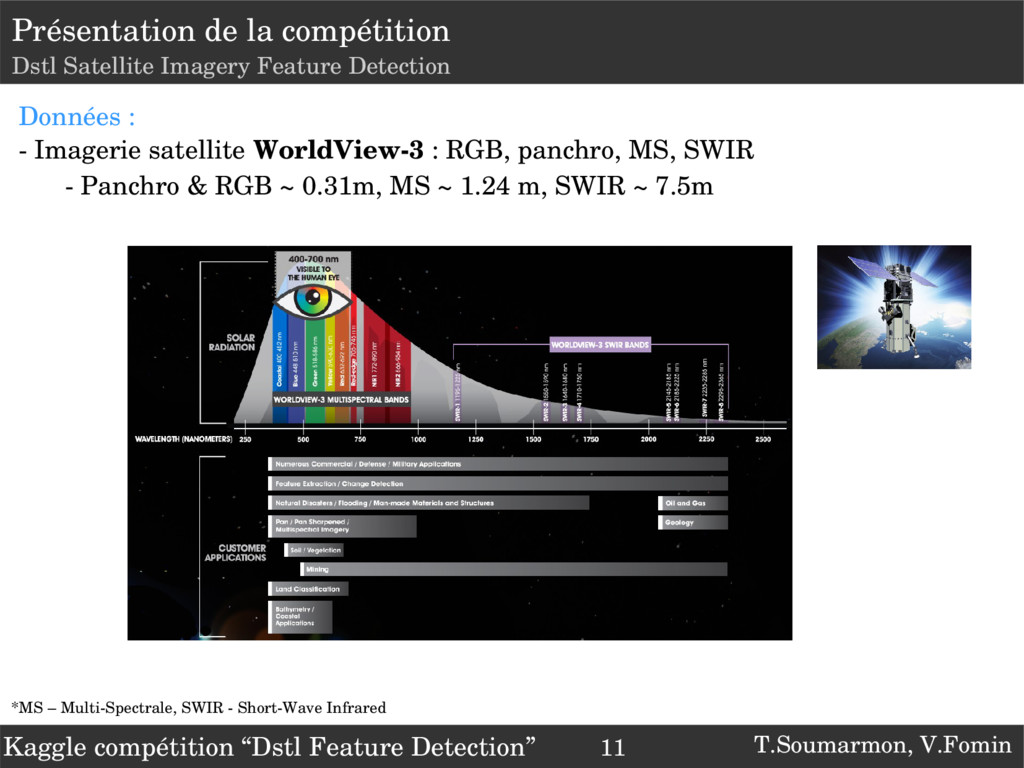
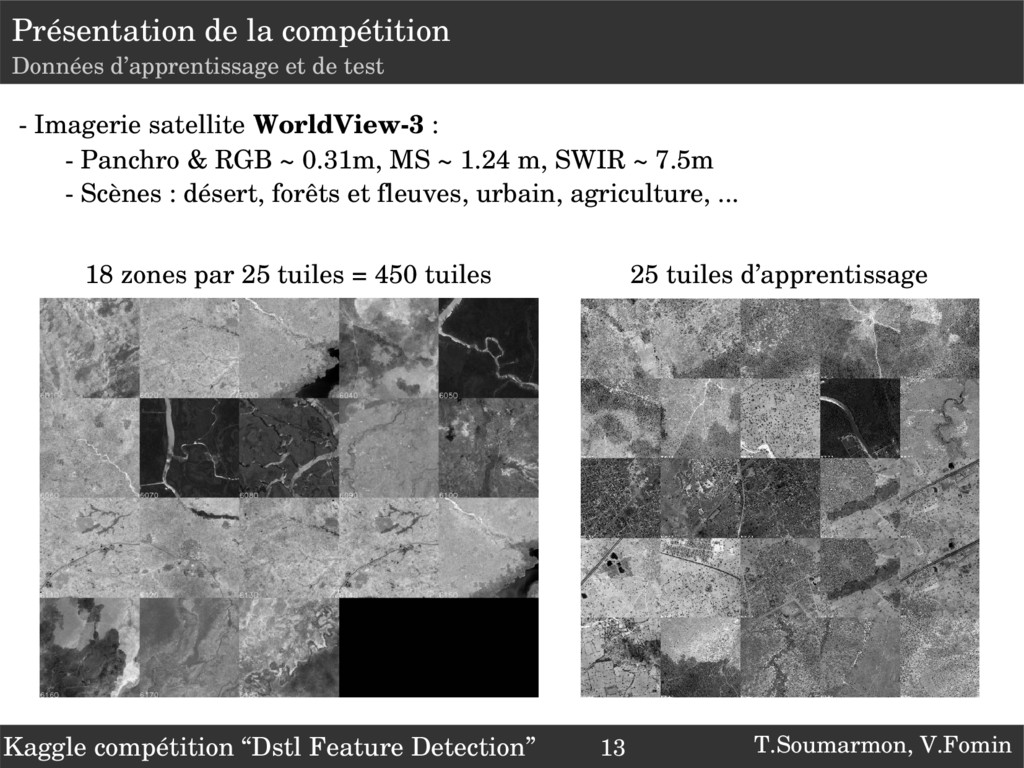
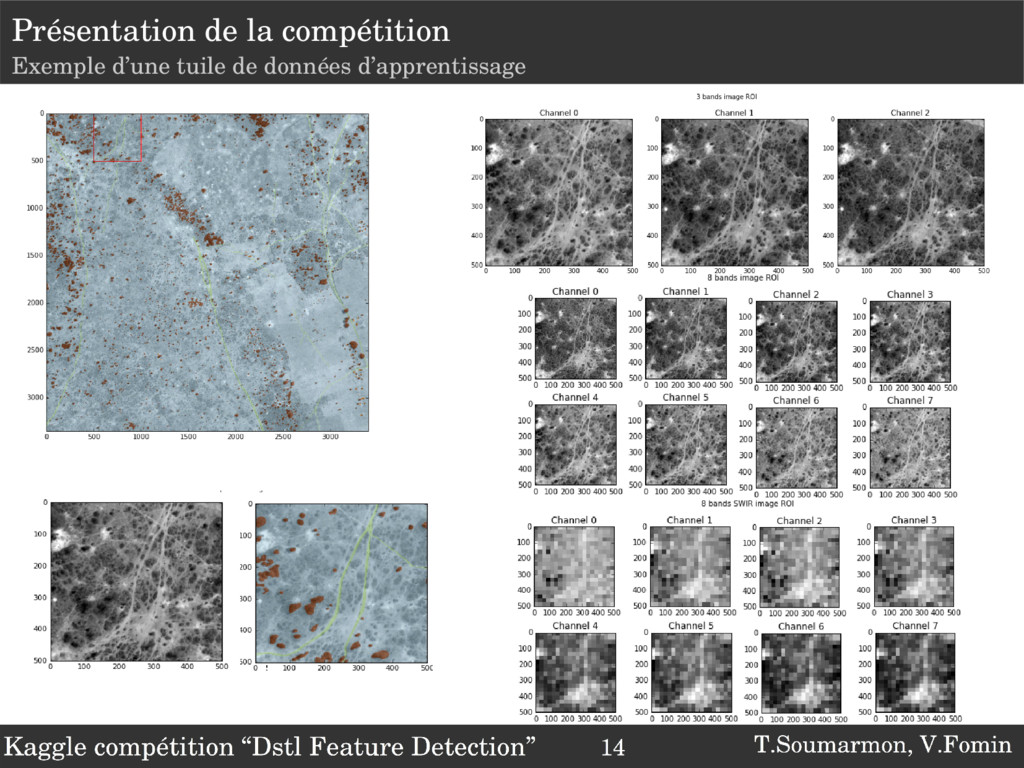
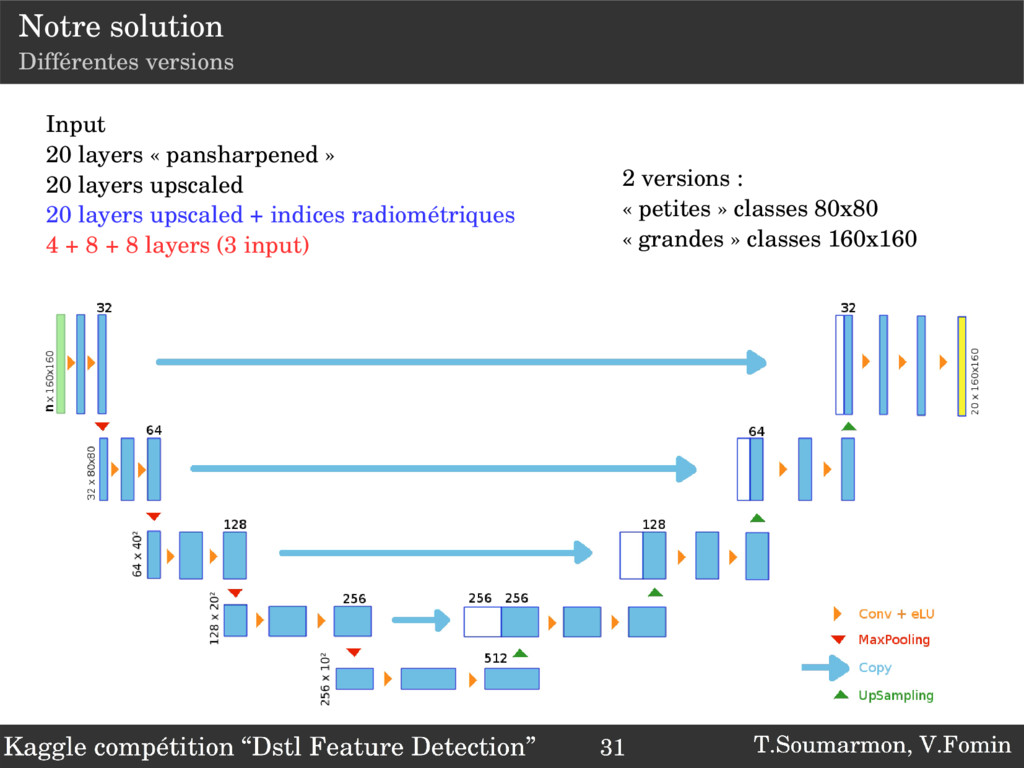
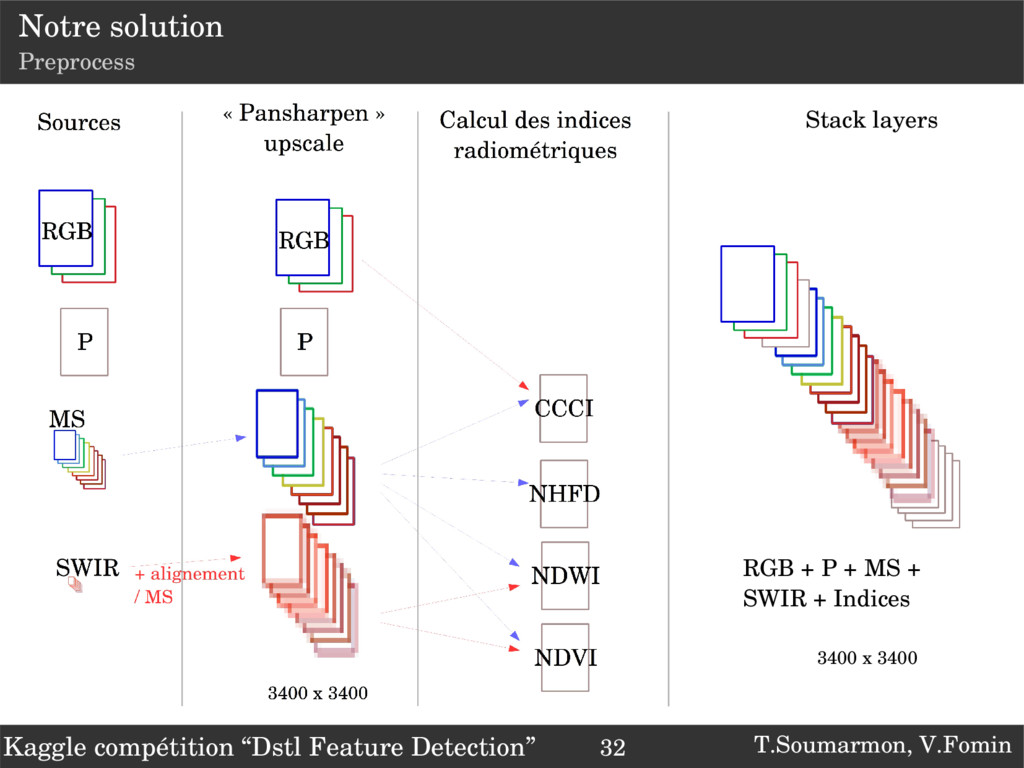
* exploitation d’images multispectrales WorldView-3 résolution 30 cm
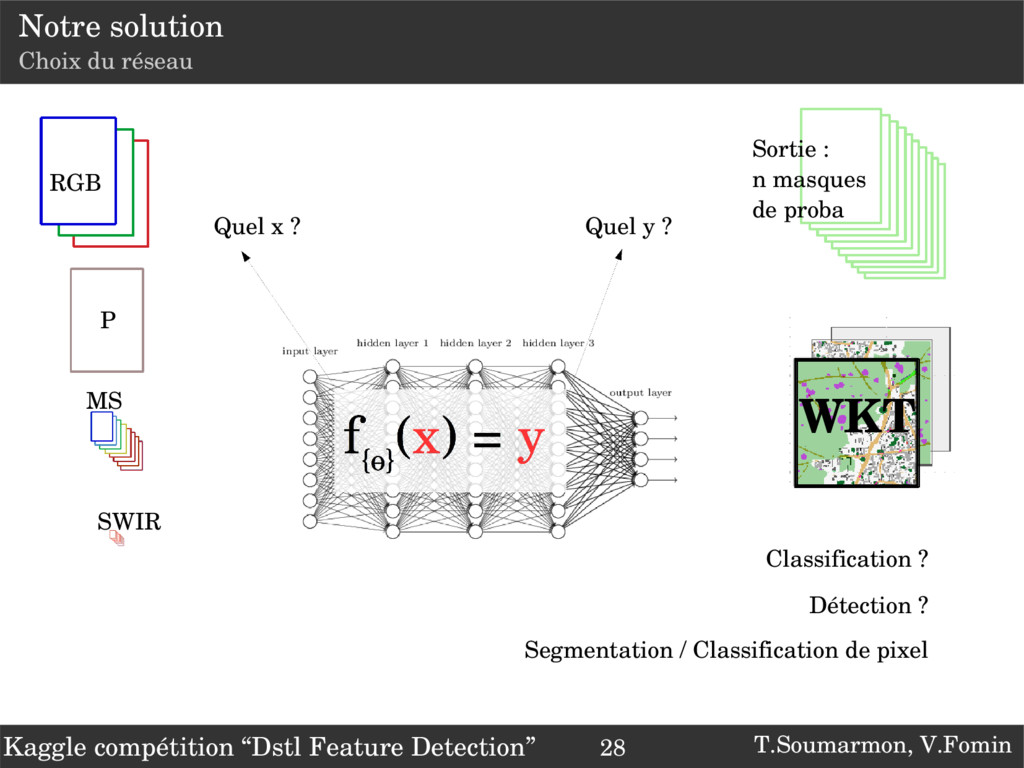
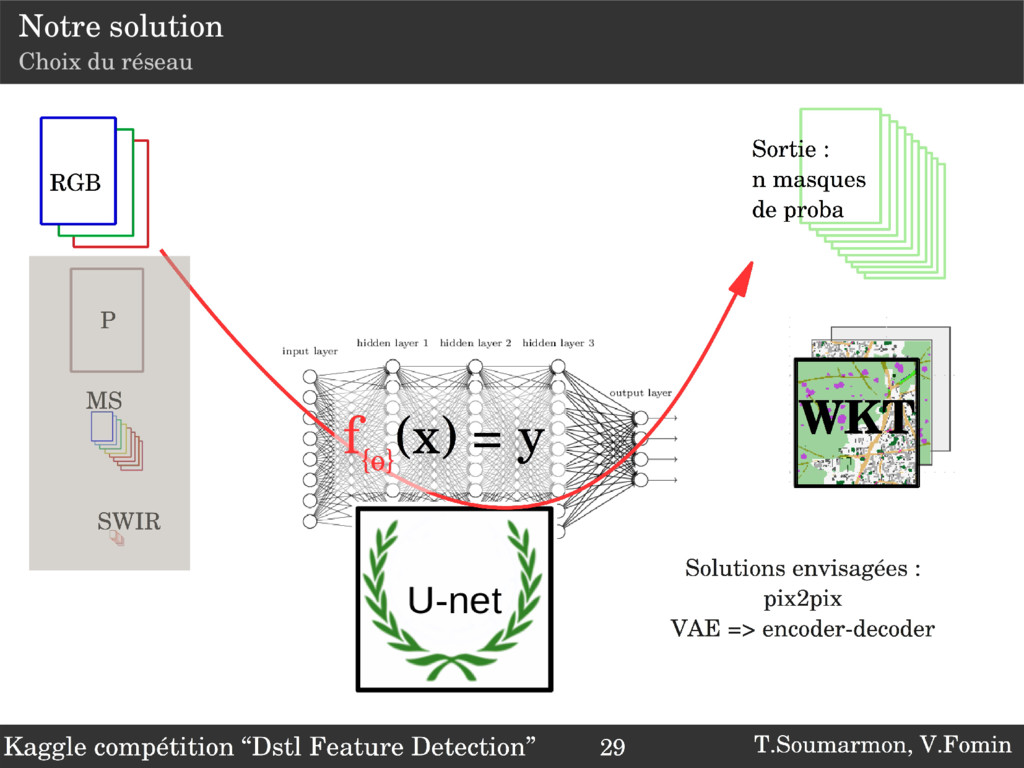
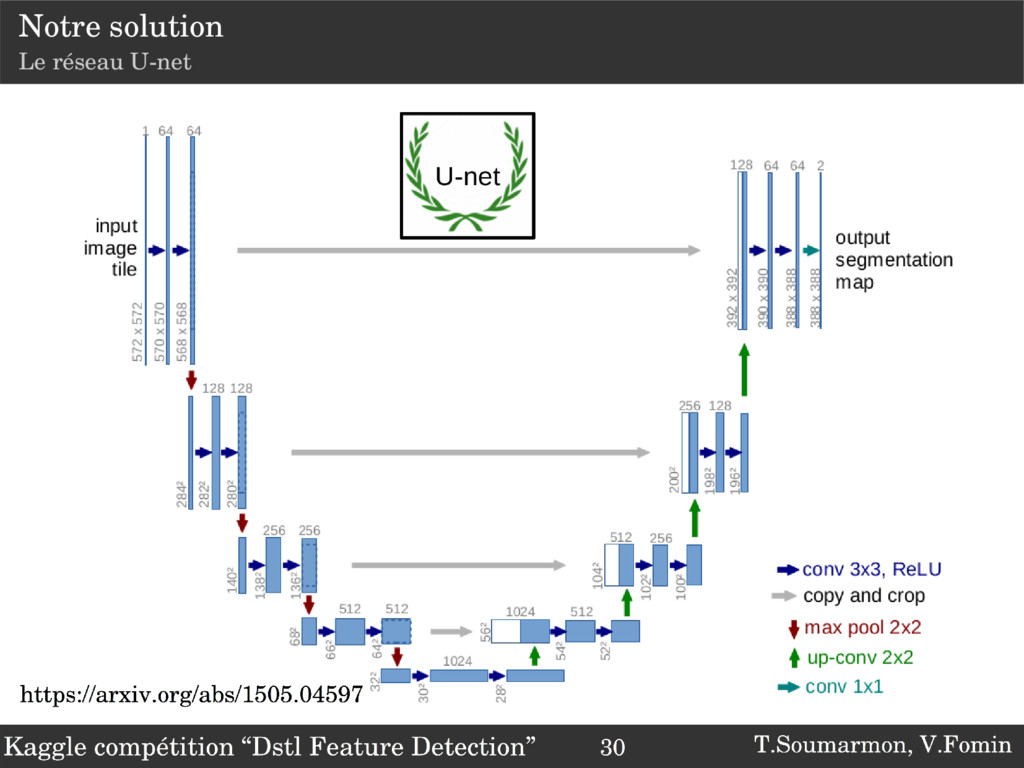
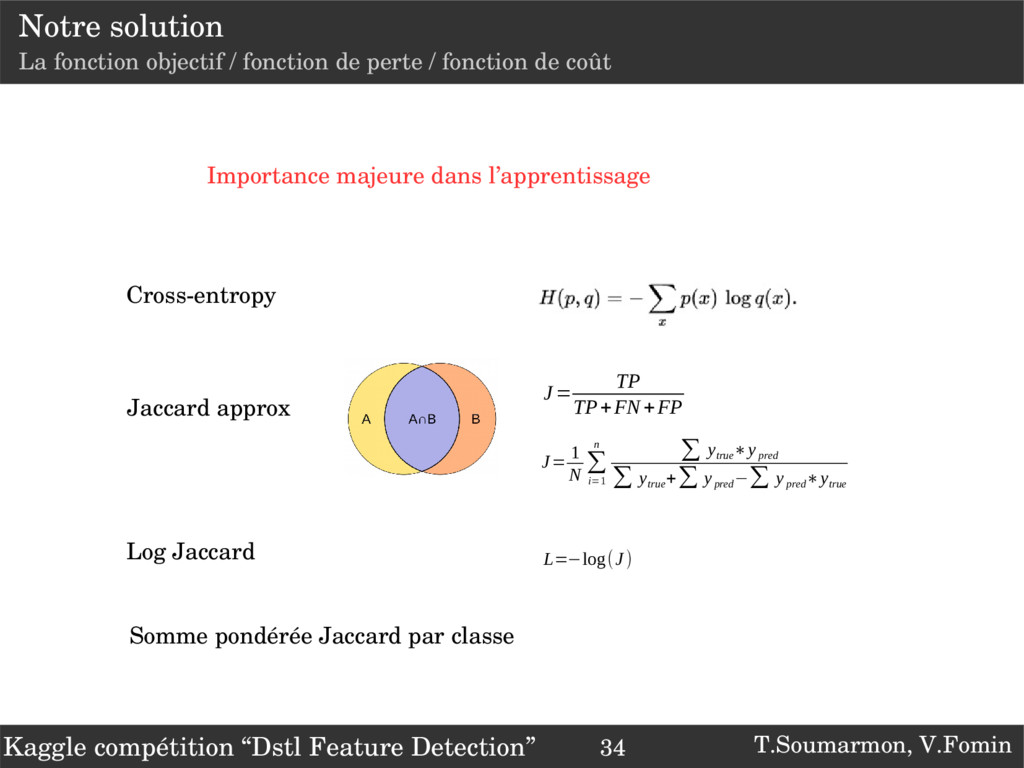
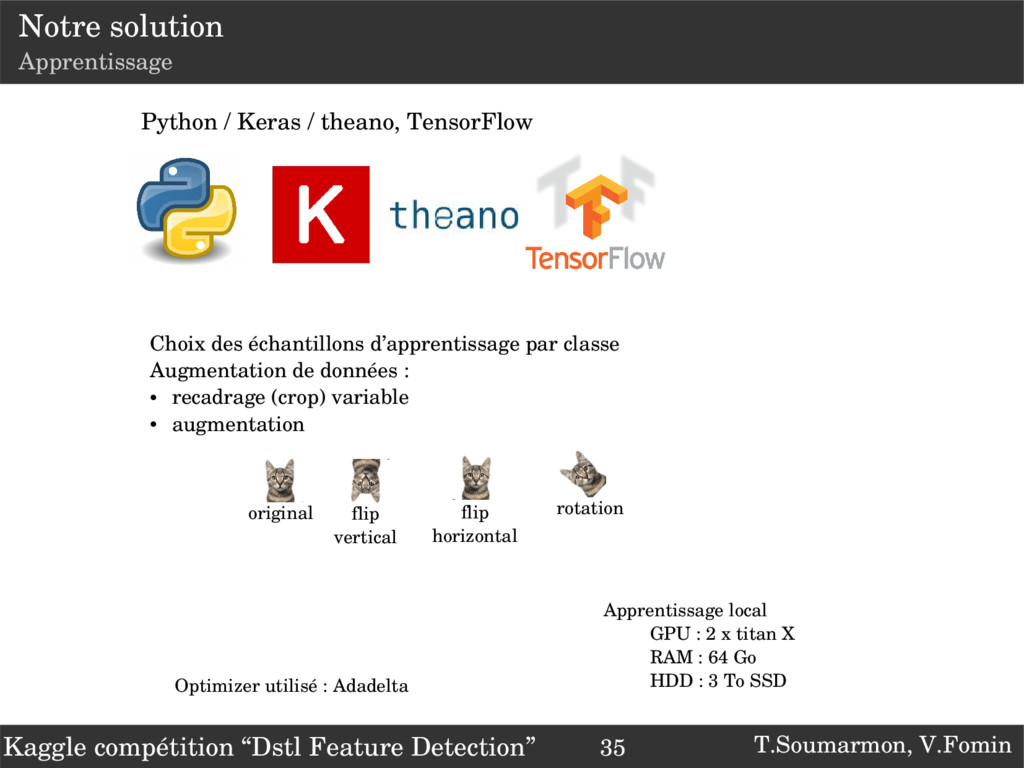
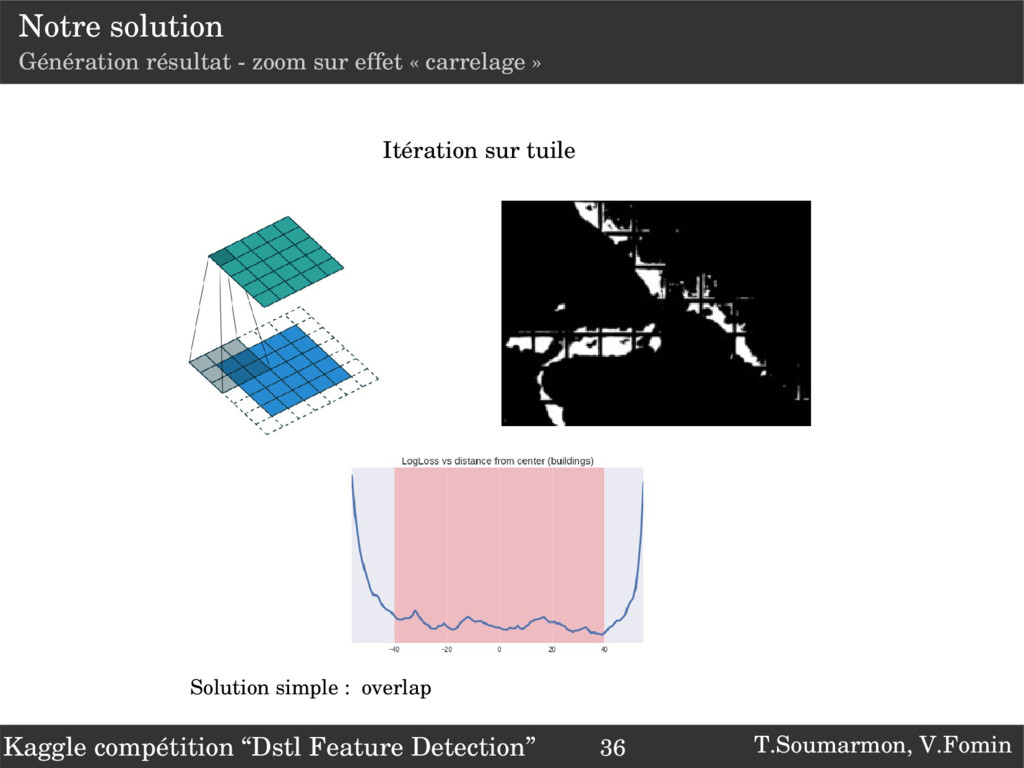
* deep-learning : un réseau de neurones pour la segmentation de pixel
* travailler pour Q au service de sa majesté
--------------------------------------------------------------------------------------------------------
Bio :
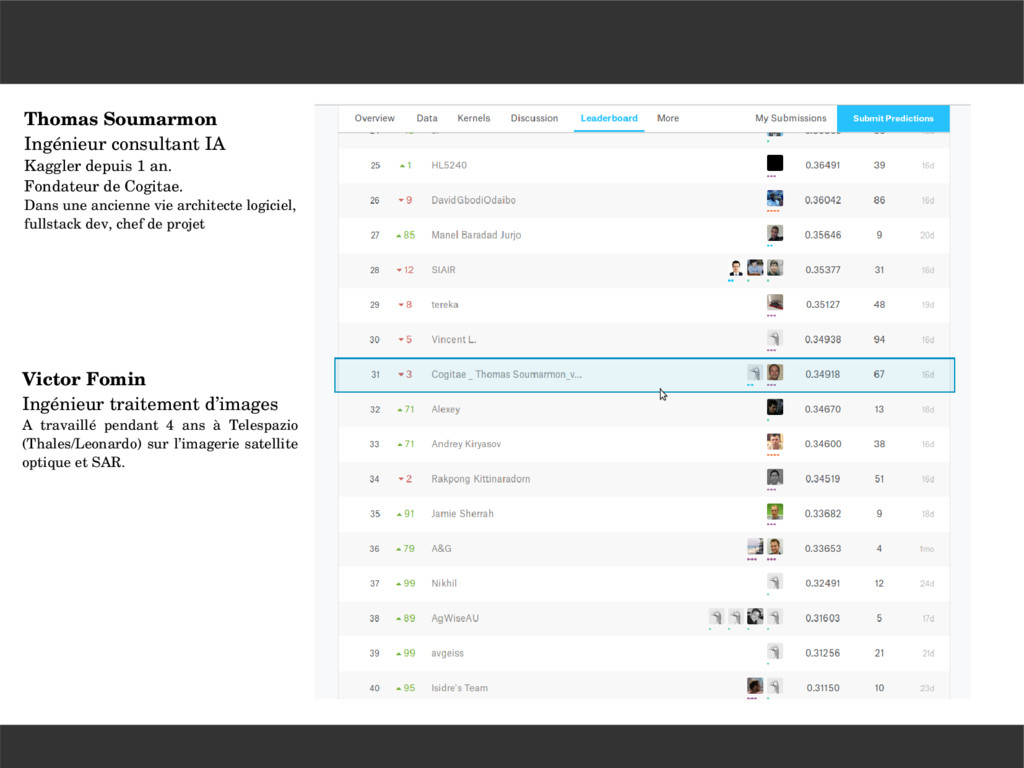
Thomas Soumarmon: Consultant data scientist IA passionné de deep-learning. Kaggler depuis 1 an. Fondateur de Cogitae.
Victor Fomin: Ingénieur traitement d’images. A travaillé pendant 4 ans chez Telespazio (Thales/Leonardo) sur l’imagerie satellite optique et radar.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}