Sujet: Application of Computer Vision Deep Learning techniques in domain of GPS signals
Speaker: Evgenii Munin, PhD Candidate at ENAC
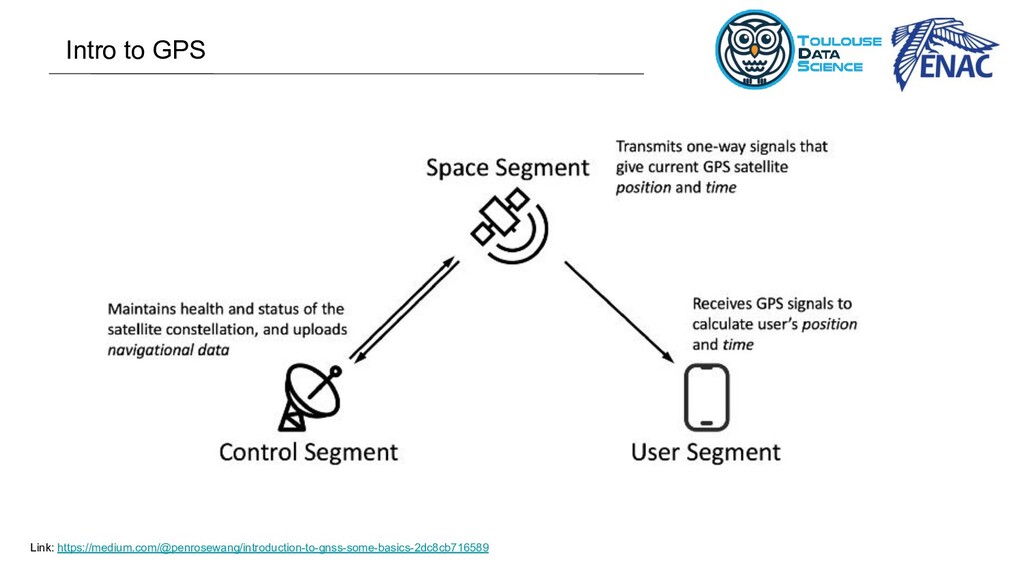
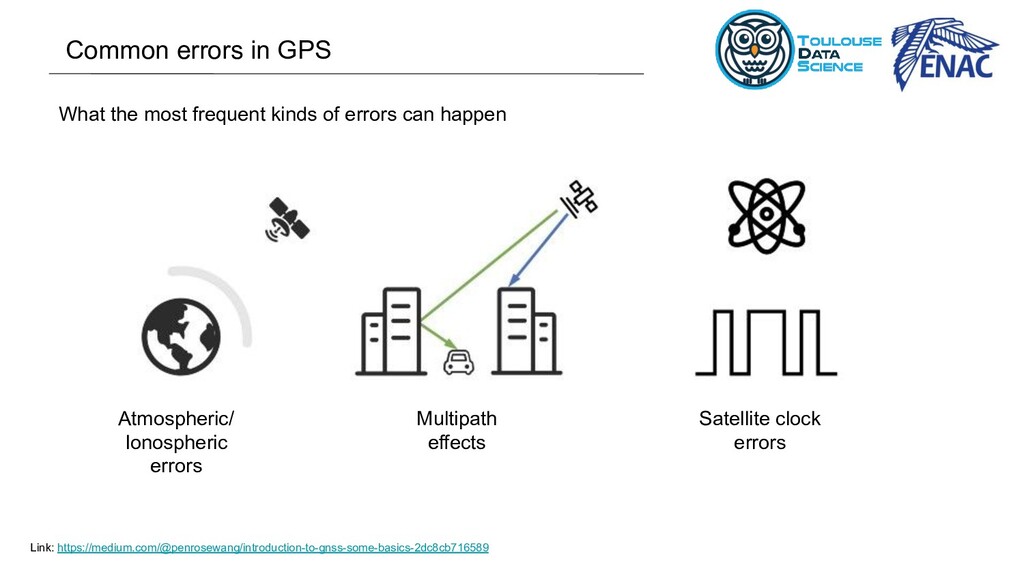
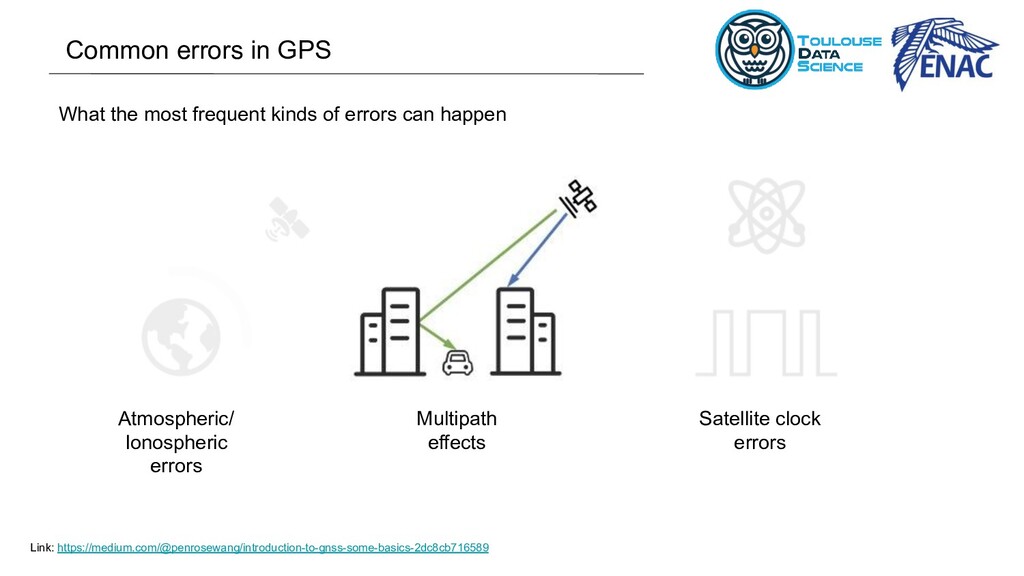
Les signaux GPS sont souvent soumis aux différents types d'événements provoquants la degradation de positionnement. Dans beaucoup des cas, ce type d'erreur est dû à la présence des obstacles (dites de canion urban: bâtiment, voitures etc.). Ces obstacles par réflection génèrent des signaux multiples qui peuvent biaiser le positionnement du récepteur GPS.
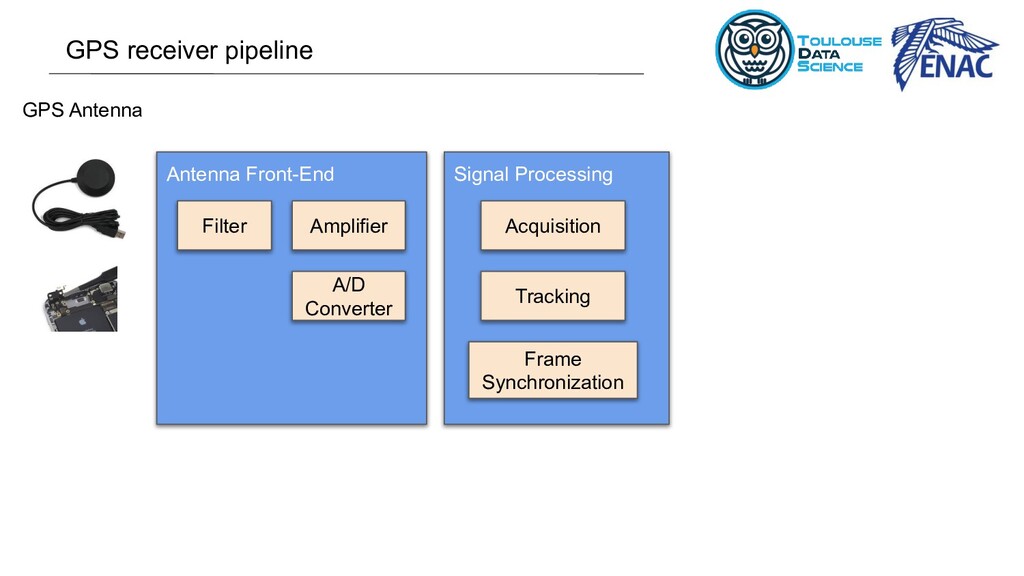
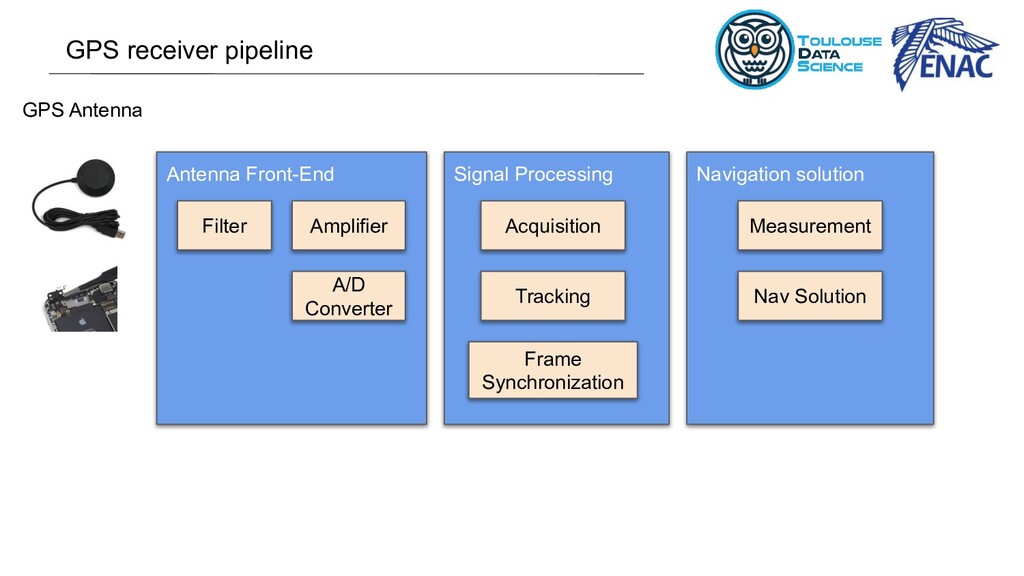
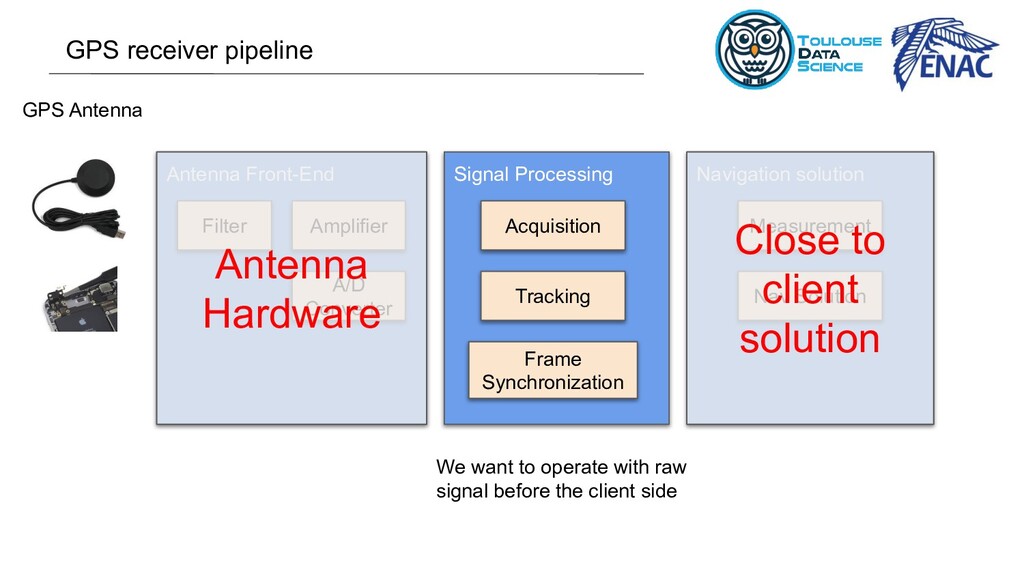
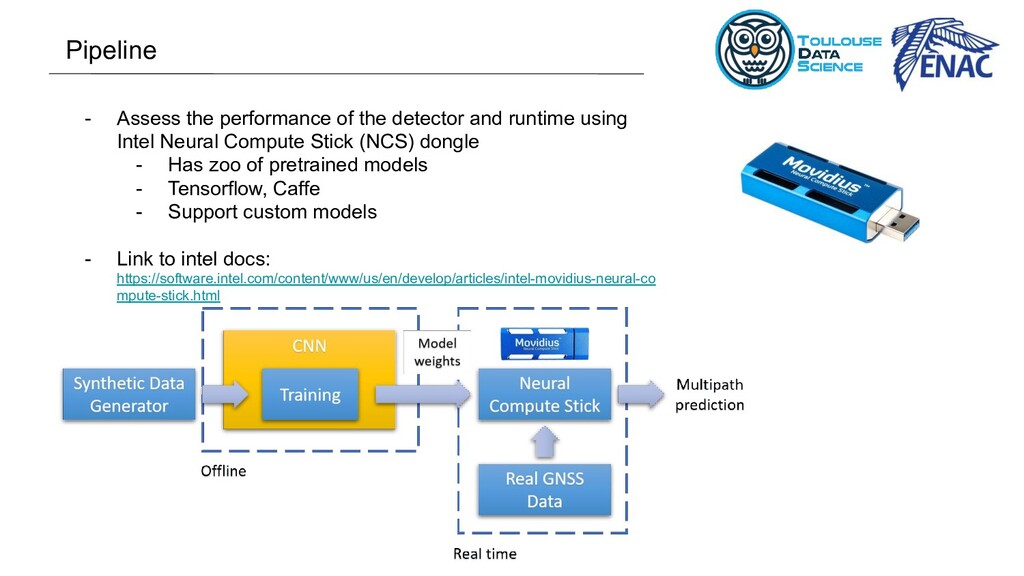
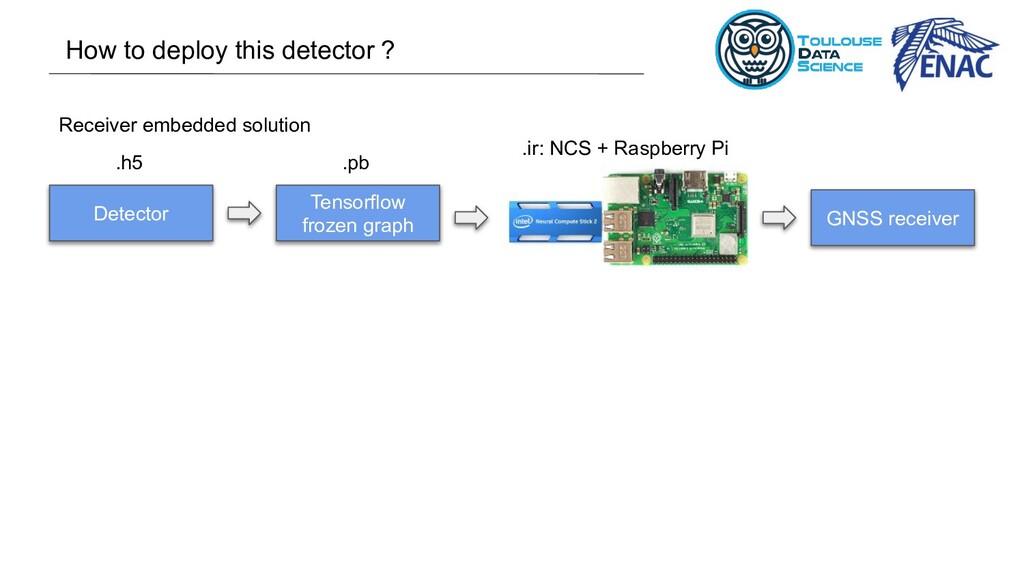
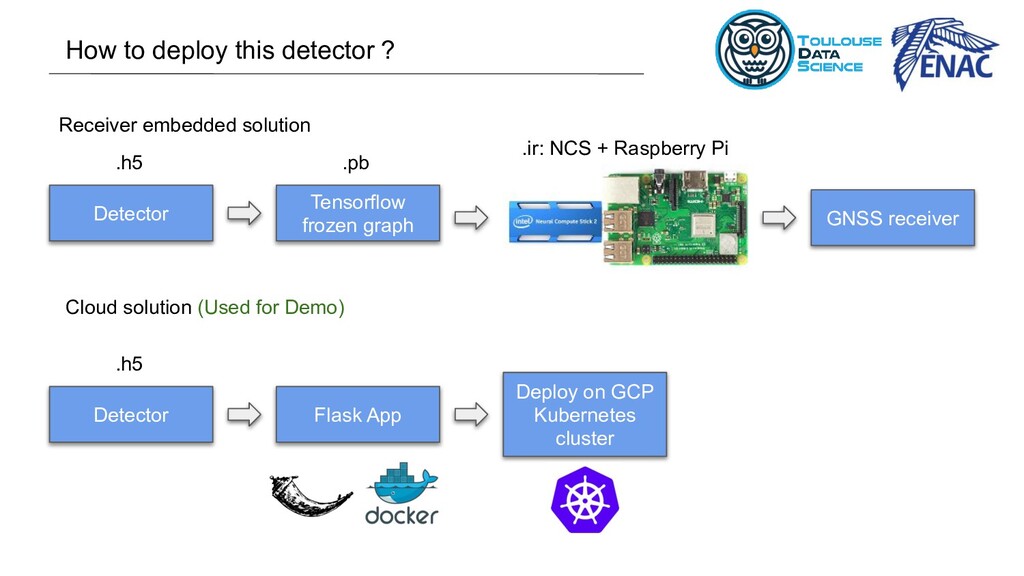
Dans cette présentation, nous expliquerons une façon de détecter les erreurs liées aux trajets multiples en utilisant l'approche de Computer Vision. Nous allons décrire le detecteur qui intervient au niveau de récepteur GPS et qui travaille avec le signal brute. Puis nous parlerons de la question de la possibilité de faire tourner ce type de détecteur sur un module de basse consommation d'énergie en utilisant I'Intel Neural Compute Stick VPU.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![- Uniformly distributed C/N0 ratio in the interval [42, 48]](https://files.speakerdeck.com/presentations/f5c06f73101f485ab829e108fb3685a9/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![C/N0 = [40...45] dBHz Benchmark results: Alexis Louis, Mathieu Raimondi.](https://files.speakerdeck.com/presentations/f5c06f73101f485ab829e108fb3685a9/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}