Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
つくチャレ2020第2回LT大会 Doog スポンサー発表 / TC2020 Lightnin...
Search
Sponsored
·
SiteGround - Reliable hosting with speed, security, and support you can count on.
→
つくばチャレンジ実行委員会
November 29, 2020
Technology
950
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
つくチャレ2020第2回LT大会 Doog スポンサー発表 / TC2020 Lightning Talks #2 Doog
つくばチャレンジ2020第2回LT大会 - connpass
https://tsukubachallenge.connpass.com/event/195912/
つくばチャレンジ実行委員会
November 29, 2020
More Decks by つくばチャレンジ実行委員会
See All by つくばチャレンジ実行委員会
つくばチャレンジ2024EX@イーアスつくば課題コース
tsukubachallenge
0
2k
つくばチャレンジ2024全体概要
tsukubachallenge
0
810
つくばチャレンジ2024EX@イーアスつくば概要
tsukubachallenge
0
730
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場課題コース
tsukubachallenge
0
1.9k
つくばチャレンジ2023第2回LT大会オープニング
tsukubachallenge
0
500
つくばチャレンジ2023EX with PLATEAU@つくばセンター広場概要
tsukubachallenge
0
1.7k
つくばチャレンジ2023EX with PLATEAU チュートリアル
tsukubachallenge
0
3.5k
つくばチャレンジ2023第1回LT大会オープニング
tsukubachallenge
0
570
つくばチャレンジ2023EX@イーアスつくば課題コース
tsukubachallenge
0
3.6k
Other Decks in Technology
See All in Technology
LLMやAIエージェントをソフトウェアに組み込むプラクティス
shibuiwilliam
1
360
最適な自走を最小限の支援で — M&Aで拡大する組織で少人数SREが挑んだ1年 / SRE NEXT 2026
genda
0
1.1k
Gen3R: 3D Scene Generation Meets Feed-Forward Reconstruction
spatial_ai_network
0
120
AI時代のエンジニアキャリアについて今一度考える
sakamoto_582
2
1.5k
AI Driven AI Governance
pict3
0
340
Keeping applications secure by evolving OAuth 2.0 and OpenID Connect
ahus1
PRO
1
160
環境凍結という Toil を倒す -セルフサービス型 Ephemeral テスト環境の 設計と実践
shirouz
1
2.3k
【Claude Code】鹿野さんに聞く 私の推しの並行開発環境 大公開 / claude-code-parallel-2026-07-15
tonkotsuboy_com
11
7k
Compose 新機能総まとめ / What's New in Jetpack Compose
yanzm
0
170
Zoom2Youtube.Claude
kawaguti
PRO
3
490
個人開発で育てる「大規模設計の苗床」 - AI時代の1人開発から始める業務への知識接続 / The Seedbed for Large-Scale Design - From AI-Era Solo Projects to Professional Knowledge
bitkey
PRO
0
160
非定型なドキュメントを効率よくリファクタする 〜えぇ!?仕様書27本の移行が1日で終わったって!?〜
subroh0508
1
330
Featured
See All Featured
The Power of CSS Pseudo Elements
geoffreycrofte
82
6.4k
Lessons Learnt from Crawling 1000+ Websites
charlesmeaden
PRO
1
1.4k
Kristin Tynski - Automating Marketing Tasks With AI
techseoconnect
PRO
0
290
Context Engineering - Making Every Token Count
addyosmani
9
1k
brightonSEO & MeasureFest 2025 - Christian Goodrich - Winning strategies for Black Friday CRO & PPC
cargoodrich
3
750
Helping Users Find Their Own Way: Creating Modern Search Experiences
danielanewman
31
3.2k
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
590
Exploring the relationship between traditional SERPs and Gen AI search
raygrieselhuber
PRO
2
4.1k
CSS Pre-Processors: Stylus, Less & Sass
bermonpainter
360
30k
Between Models and Reality
mayunak
4
370
Gemini Prompt Engineering: Practical Techniques for Tangible AI Outcomes
mfonobong
2
460
Reality Check: Gamification 10 Years Later
codingconduct
0
2.2k
Transcript
メモリトレース& 研究開発向けIFの紹介 1 2020/Nov/28 Doog International Pte Ltd Hiroyasu KUNIYOSHI
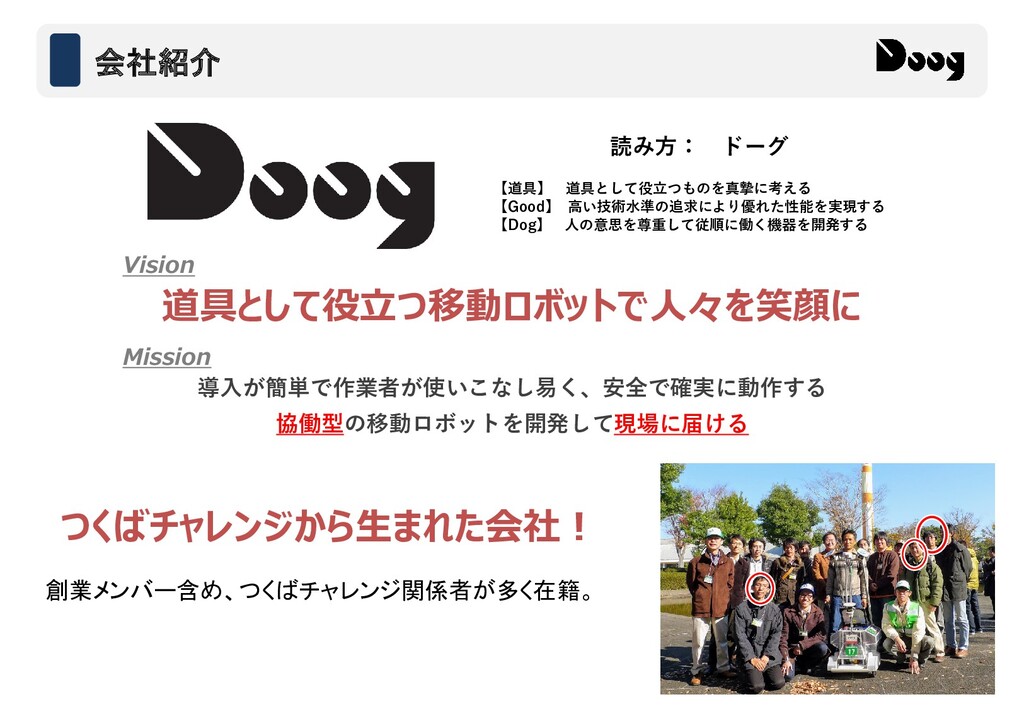
導入が簡単で作業者が使いこなし易く、安全で確実に動作する 協働型の移動ロボットを開発して現場に届ける 道具として役立つ移動ロボットで人々を笑顔に Vision Mission 読み方: ドーグ 【道具】 道具として役立つものを真摯に考える 【Good】
高い技術水準の追求により優れた性能を実現する 【Dog】 人の意思を尊重して従順に働く機器を開発する 会社紹介 つくばチャレンジから生まれた会社! 創業メンバー含め、つくばチャレンジ関係者が多く在籍。
主力製品 協働運搬ロボット
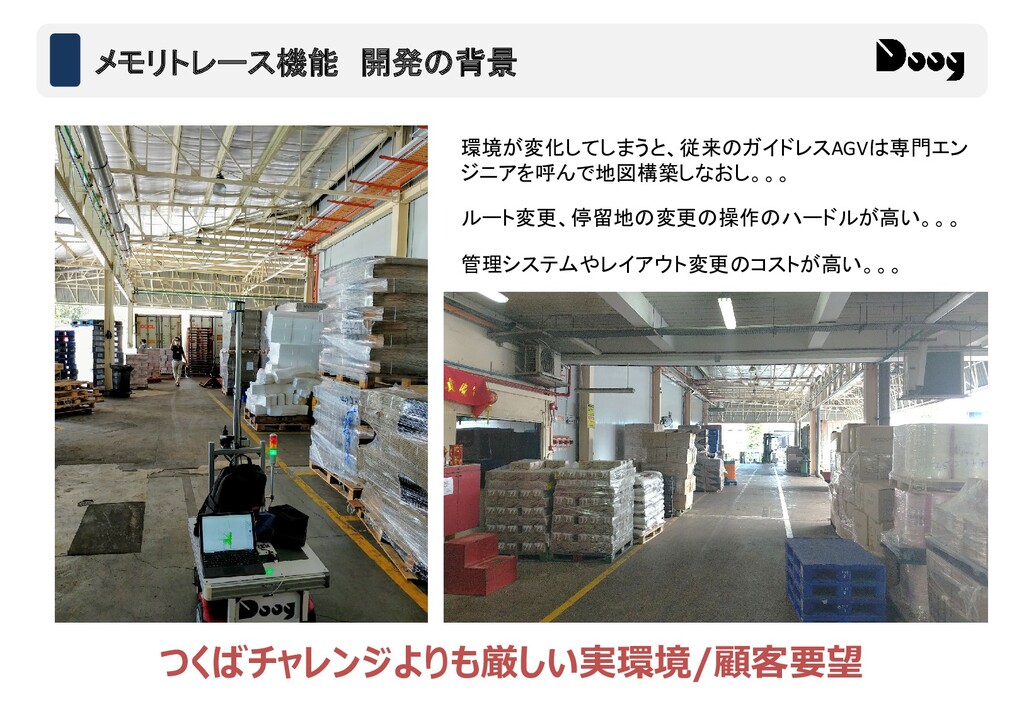
メモリトレース機能 開発の背景 環境が変化してしまうと、従来のガイドレスAGVは専門エン ジニアを呼んで地図構築しなおし。。。 ルート変更、停留地の変更の操作のハードルが高い。。。 管理システムやレイアウト変更のコストが高い。。。 つくばチャレンジよりも厳しい実環境/顧客要望
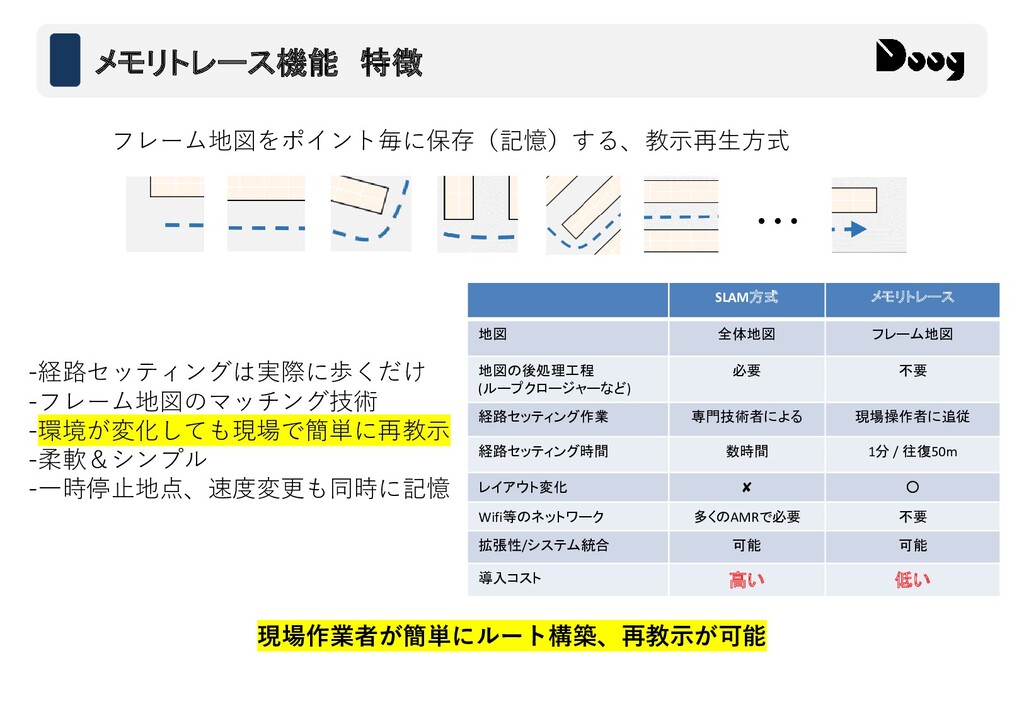
フレーム地図をポイント毎に保存(記憶)する、教示再生方式 … -経路セッティングは実際に歩くだけ -フレーム地図のマッチング技術 -環境が変化しても現場で簡単に再教示 -柔軟&シンプル -一時停止地点、速度変更も同時に記憶 現場作業者が簡単にルート構築、再教示が可能 SLAM方式 メモリトレース
地図 全体地図 フレーム地図 地図の後処理工程 (ループクロージャーなど) 必要 不要 経路セッティング作業 専門技術者による 現場操作者に追従 経路セッティング時間 数時間 1分 / 往復50m レイアウト変化 ✘ ◦ Wifi等のネットワーク 多くのAMRで必要 不要 拡張性/システム統合 可能 可能 導入コスト 高い 低い メモリトレース機能 特徴
メモリトレース機能 応用例 自動運転車椅子 建築現場
研究開発向けIFの紹介 7
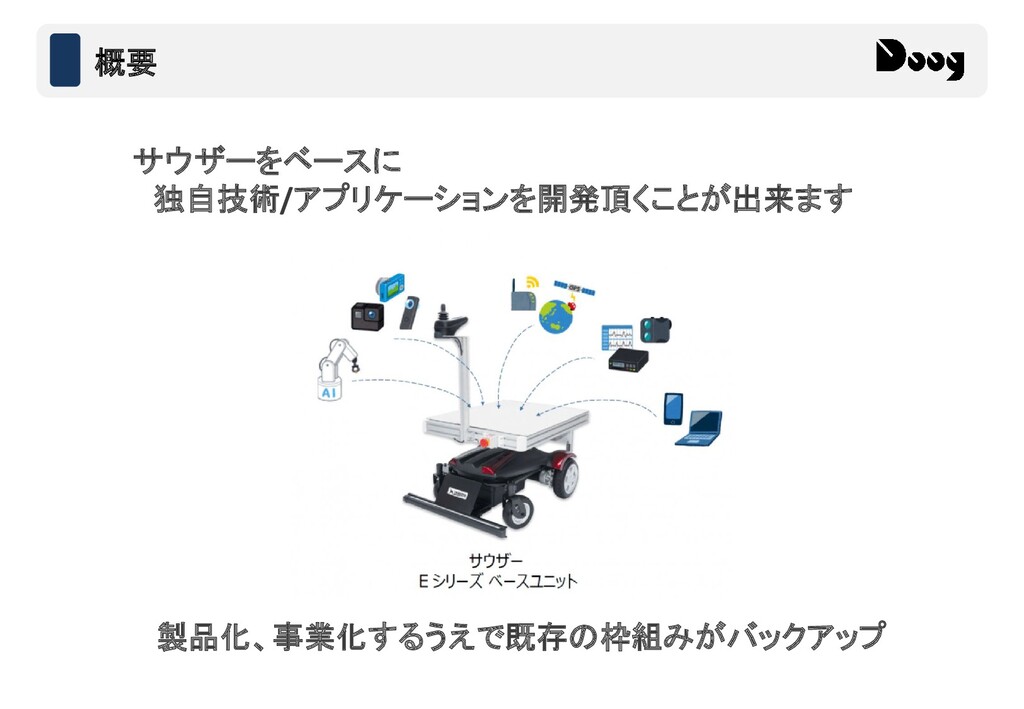
概要 サウザーをベースに 独自技術/アプリケーションを開発頂くことが出来ます 製品化、事業化するうえで既存の枠組みがバックアップ
お使い頂ける項目 • 障害物検知、回避付き走行指令コマンド 複数の走行制御方式から選択(MQTTプロトコル) • アプリケーションの起動終了、電池残量等の状態取得 (MQTTプロトコル*1) • サウザーに搭載されている2D LIDARの生データ(北陽電
機社製UST-10LX, SCIPプロトコル*2) • 電気系統の外部供給仕様、ハードウェア図面などカスタ マイズのための技術情報 w_degps x_m y_m v_mps direction_deg distance_m (1) Designated speed running (2) Arc curve running (3)Obstacle avoiding running 障害物検知なし 障害物検知減速停止 障害物回避 円弧で経路を指定 搭載LiDARによる自動停止、回避ありコマンド 仮想追従対象位置を指定 ロボットモビリティ
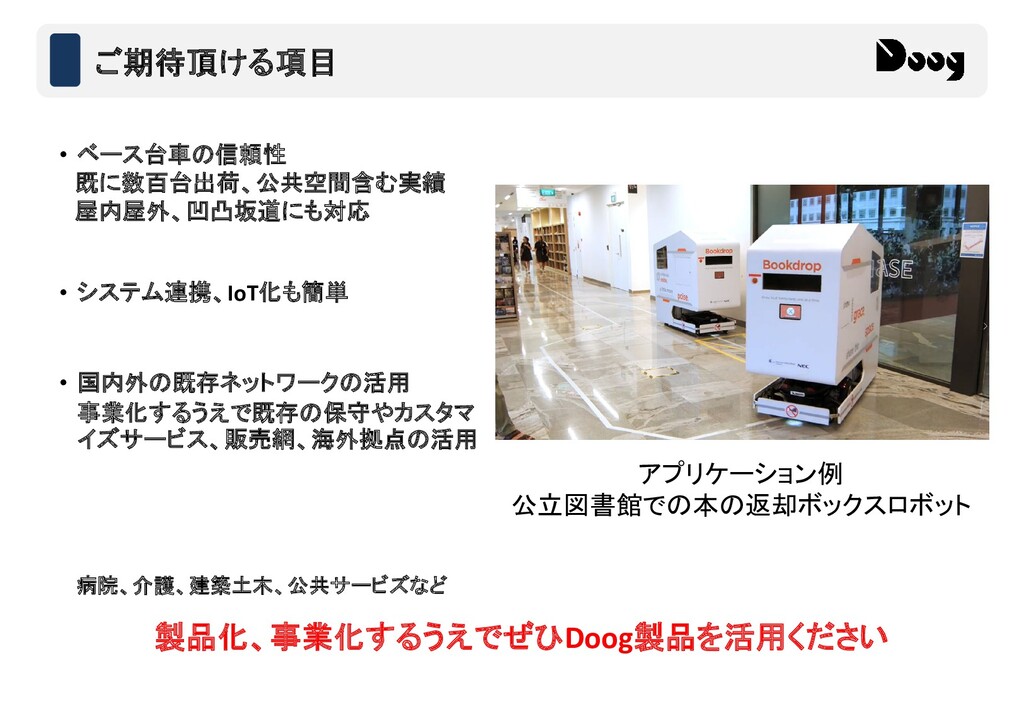
ご期待頂ける項目 製品化、事業化するうえでぜひDoog製品を活用ください • ベース台車の信頼性 既に数百台出荷、公共空間含む実績 屋内屋外、凹凸坂道にも対応 • 国内外の既存ネットワークの活用 事業化するうえで既存の保守やカスタマ イズサービス、販売網、海外拠点の活用
アプリケーション例 公立図書館での本の返却ボックスロボット 病院、介護、建築土木、公共サービズなど • システム連携、IoT化も簡単
None
doog-inc.com 型番 単価(税抜) オプション適用価格(税抜) R-Fans-16 470,000円 370,000円 型番 R-Fans-16 R-Fans-16M
スキャンレート [Hz] 5~20 測定点数 [pts/s] 320,000 水平視野 [deg] 360 水平分解能 [deg] 0.09~0.36 (5~20Hz) 垂直視野 [deg] 30 26 ‐下端 [deg] -15 -15 ‐上端 [deg] 15 11 垂直分解能 [deg] 2 非均一, 1 / 1.5 / 2 / 2.5 / 3 最大距離 [m] 200 センサー販売
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}