✓ KL annealing [Bowman et al. 2015, Fu et al 2019] ✓ Free-Bits (FB) [Kingma et al. 2016] ✓ aggressive training schedules [He et al. 2018] ✓ Decoder network weakening [Yang et al. 2017] ✓ …… ⚫ 目的関数を修正して潜在空間を学習する ✓ add Mutual Information (MI) based term [Fang et al. 2019, Zhao et al. 2019] ✓ define Mutual Posterior Divergence (MPD) based term [Ma et al. 2018]
Posterior collapse を取り除くための多くの先行研究が存在する ⚫ Posterior collapse を最適化問題として解く ✓ KL annealing [Bowman et al. 2015, Fu et al 2019] ✓ Free-Bits (FB) [Kingma et al. 2016] ✓ aggressive training schedules [He et al. 2018] ✓ Decoder network weakening [Yang et al. 2017] ✓ …… ⚫ 目的関数を修正して潜在空間を学習する ✓ add Mutual Information (MI) based term [Fang et al. 2019, Zhao et al. 2019] ✓ define Mutual Posterior Divergence (MPD) based term [Ma et al. 2018]
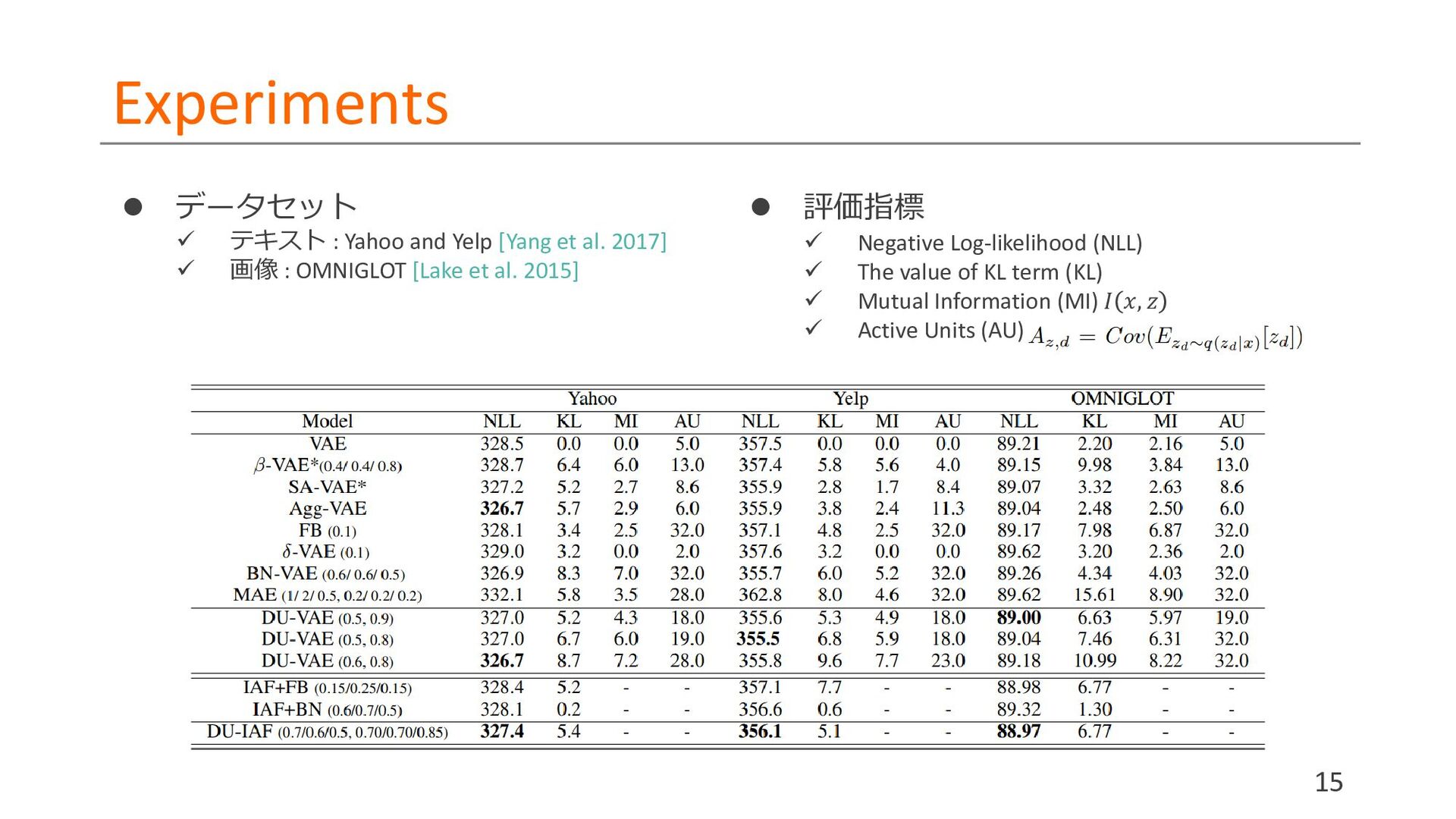
[Yang et al. 2017] ✓ 画像 : OMNIGLOT [Lake et al. 2015] ⚫ 評価指標 ✓ Negative Log-likelihood (NLL) ✓ The value of KL term (KL) ✓ Mutual Information (MI) 𝐼 𝑥, 𝑧 ✓ Active Units (AU)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}