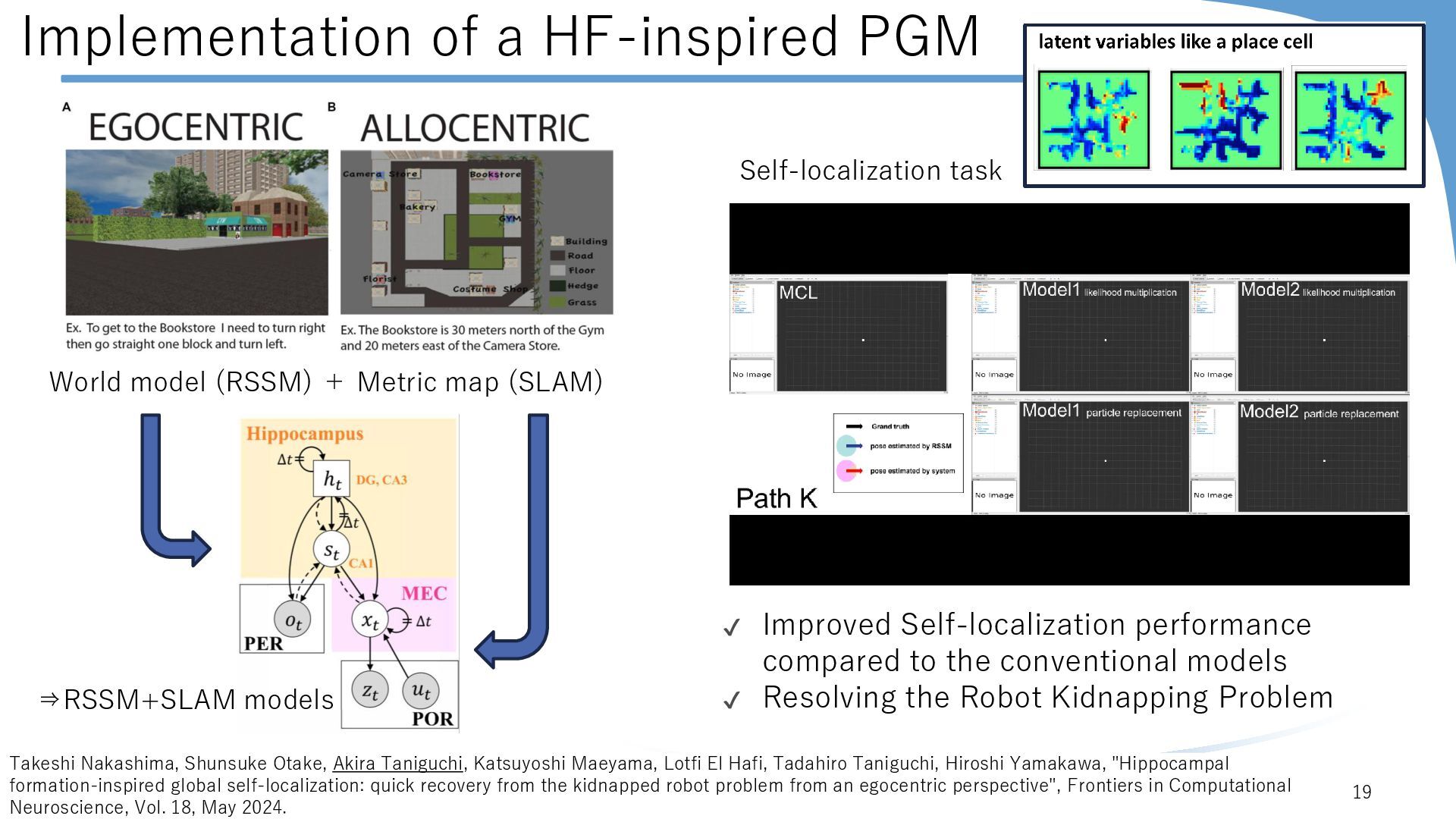
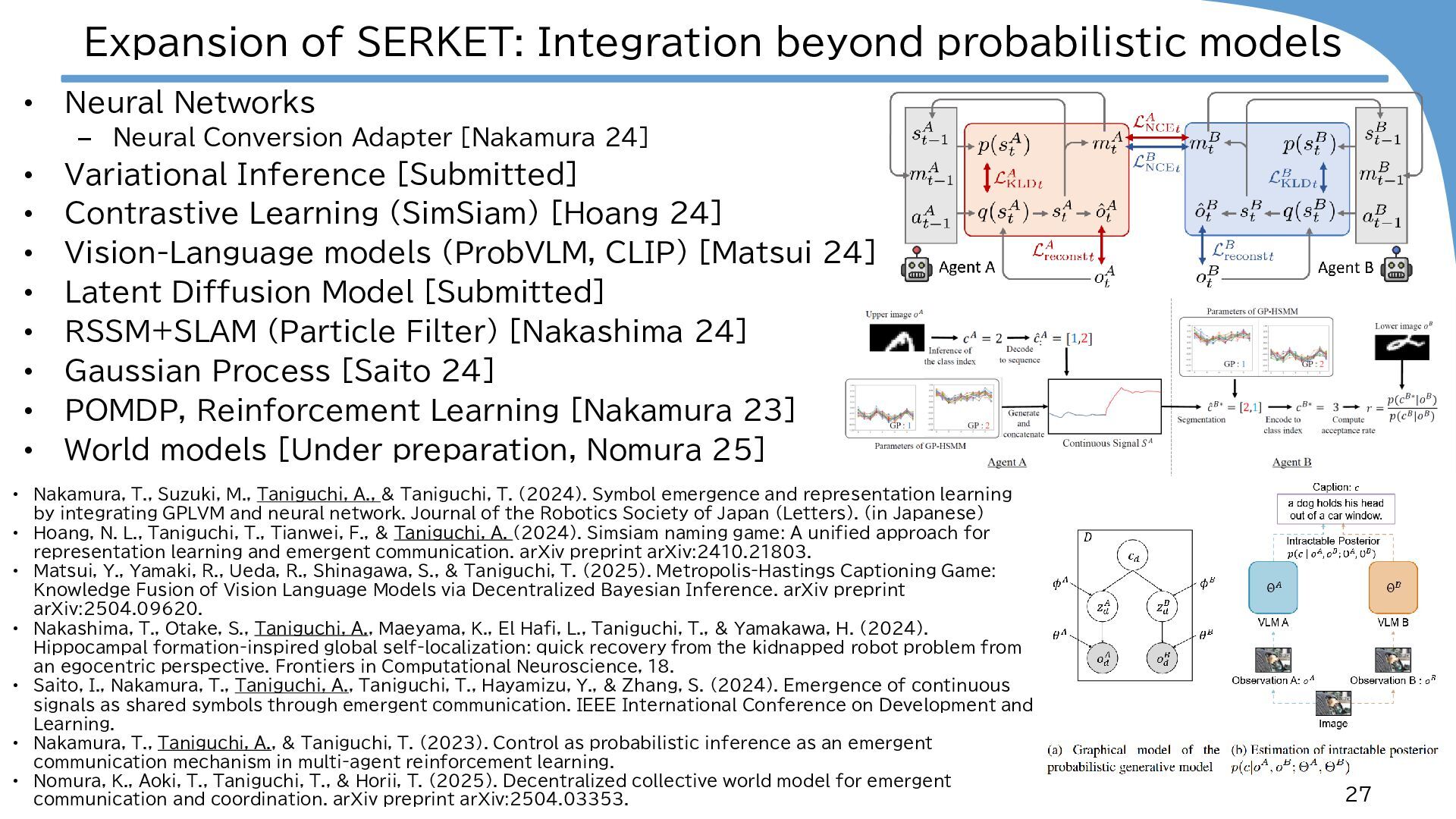
– Neural Conversion Adapter [Nakamura 24] • Variational Inference [Submitted] • Contrastive Learning (SimSiam) [Hoang 24] • Vision-Language models (ProbVLM, CLIP) [Matsui 24] • Latent Diffusion Model [Submitted] • RSSM+SLAM (Particle Filter) [Nakashima 24] • Gaussian Process [Saito 24] • POMDP, Reinforcement Learning [Nakamura 23] • World models [Under preparation, Nomura 25] 27 • Nakamura, T., Suzuki, M., Taniguchi, A., & Taniguchi, T. (2024). Symbol emergence and representation learning by integrating GPLVM and neural network. Journal of the Robotics Society of Japan (Letters). (in Japanese) • Hoang, N. L., Taniguchi, T., Tianwei, F., & Taniguchi, A. (2024). Simsiam naming game: A unified approach for representation learning and emergent communication. arXiv preprint arXiv:2410.21803. • Matsui, Y., Yamaki, R., Ueda, R., Shinagawa, S., & Taniguchi, T. (2025). Metropolis-Hastings Captioning Game: Knowledge Fusion of Vision Language Models via Decentralized Bayesian Inference. arXiv preprint arXiv:2504.09620. • Nakashima, T., Otake, S., Taniguchi, A., Maeyama, K., El Hafi, L., Taniguchi, T., & Yamakawa, H. (2024). Hippocampal formation-inspired global self-localization: quick recovery from the kidnapped robot problem from an egocentric perspective. Frontiers in Computational Neuroscience, 18. • Saito, I., Nakamura, T., Taniguchi, A., Taniguchi, T., Hayamizu, Y., & Zhang, S. (2024). Emergence of continuous signals as shared symbols through emergent communication. IEEE International Conference on Development and Learning. • Nakamura, T., Taniguchi, A., & Taniguchi, T. (2023). Control as probabilistic inference as an emergent communication mechanism in multi-agent reinforcement learning. • Nomura, K., Aoki, T., Taniguchi, T., & Horii, T. (2025). Decentralized collective world model for emergent communication and coordination. arXiv preprint arXiv:2504.03353.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![SpCoSLAM [Taniguchi 17] This model integrates SLAM, GMM, multimodal place](https://files.speakerdeck.com/presentations/f5afec2bab9e4082b5a2c38b34c8e35c/slide_12.jpg){kind=link}
![Prototype of WB-PGM [Miyazawa+ 2019] 14 Miyazawa, K., Aoki, T.,](https://files.speakerdeck.com/presentations/f5afec2bab9e4082b5a2c38b34c8e35c/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Concept Formation using Multimodal Transformer [Miyazawa 23] • Representation learning](https://files.speakerdeck.com/presentations/f5afec2bab9e4082b5a2c38b34c8e35c/slide_25.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}