Sato, et al, “LiDAR Spoofing Meets the New-Gen: Capability Improvements, Broken Assumptions, and New Attack Strategies” (NDSS’24) ◆ T. Sato, et al, "On the Realism of LiDAR Spoofing Attacks against Autonomous Driving Vehicle at High Speed and Long Distance", (NDSS’25) ◆ N. Nagata et al, “SLAMSpoof: Practical LiDAR Spoofing Attacks on Localization Systems Guided by Scan Matching Vulnerability Analysis” (ICRA’25) 今日の内容
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![吉岡研における任意形状攻撃の実現 [NDSS’24] Received Pulse Generating arbitrary pulse 21 ◼ 強力な信号発生器(FG)](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_20.jpg){kind=link}
![◼ 従来のx10以上の点群を注入し、座標も完全にコントロール ◆Chosen Pattern Injection(任意形状注入)攻撃 ◆車、人といった形状の注入が可能であることを実証 ⚫実物と同様の形状が注入できるならば、アルゴリズム面の防御は難しい? 吉岡研における任意形状攻撃の実現 [NDSS’24] 22](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_21.jpg){kind=link}
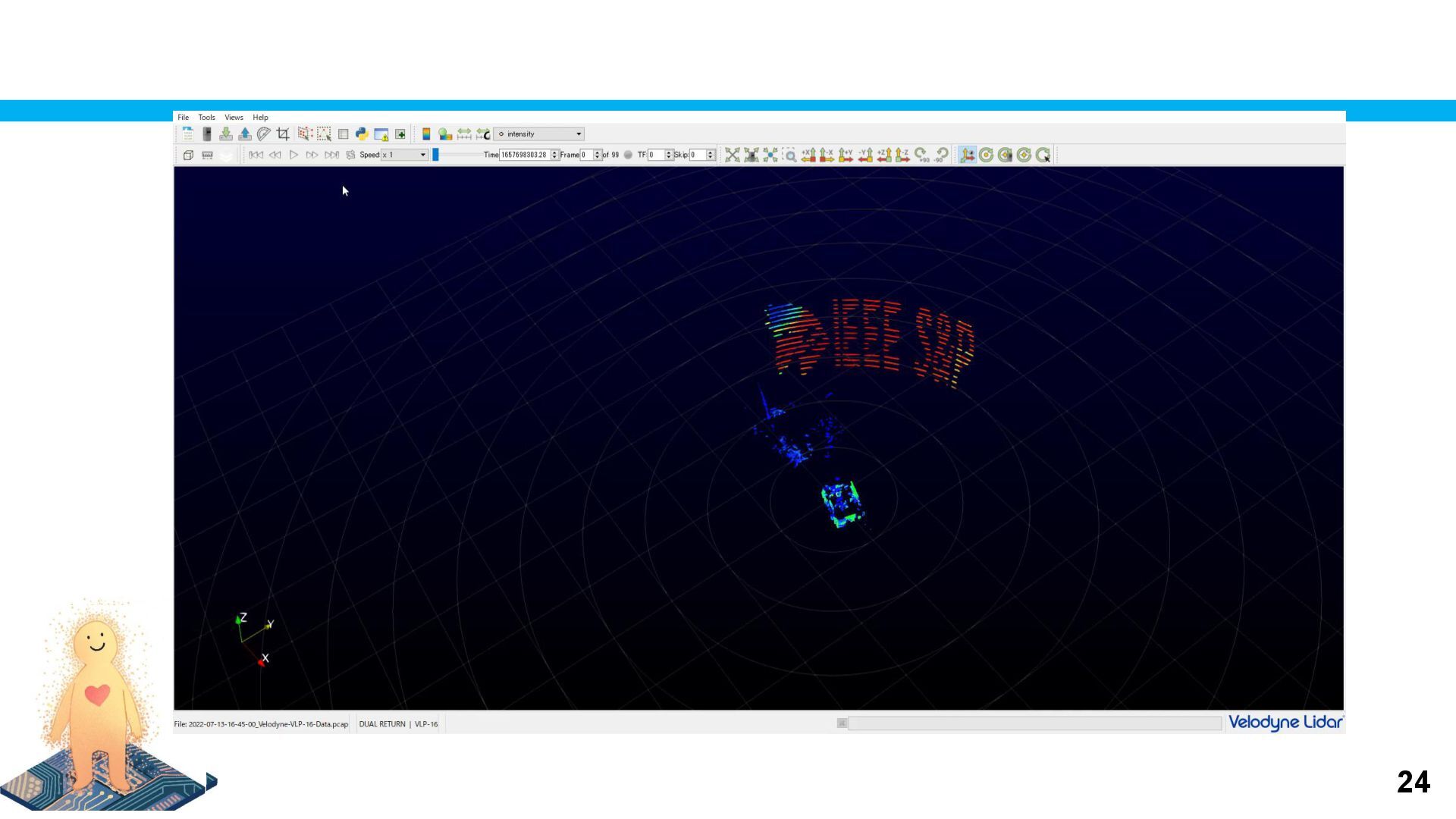
![◼ センサ幻惑攻撃デモの様子 ◆動的に攻撃レーザパターンを書き換えることで 動画注入も可能 吉岡研における任意形状攻撃の実現 [NDSS’24] 23 VLP-16 Attack laser](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_22.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![◼ Research question: 市街地走行に近いシーンで攻撃は可能なのか? ◆100m先のLiDARにレーザを狙える? ◆60km/hで走行するLiDARをトラッキングできる? ◼ 60km/hで巡航する車両+Autoware制御の自動運転車に対する攻撃を 世界で初めて成功 実車両への攻撃[NDSS’25]](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_33.jpg){kind=link}
![◼ Challenge: ◆100m先のLiDARにレーザを狙える? ◆60km/hで走行するLiDARをトラッキングできる? ◼ IRカメラベースの検知+トラッキングを提案 ◆LiDAR自身が発するレーザ光のみ捉えることで、110m先からでも 安定して追従可能 実車両への攻撃[NDSS’25] 35](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_34.jpg){kind=link}
![◼ Challenge: ◆100m先のLiDARにレーザを狙える? ◆60km/hで走行するLiDARをトラッキングできる? ◼ レーザの並列化により 先行研究の約110倍のビーム面積を達成 実車両への攻撃[NDSS’25] 36 LD:](https://files.speakerdeck.com/presentations/57aa033811cf4731a30aebdabbf446db/slide_35.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}