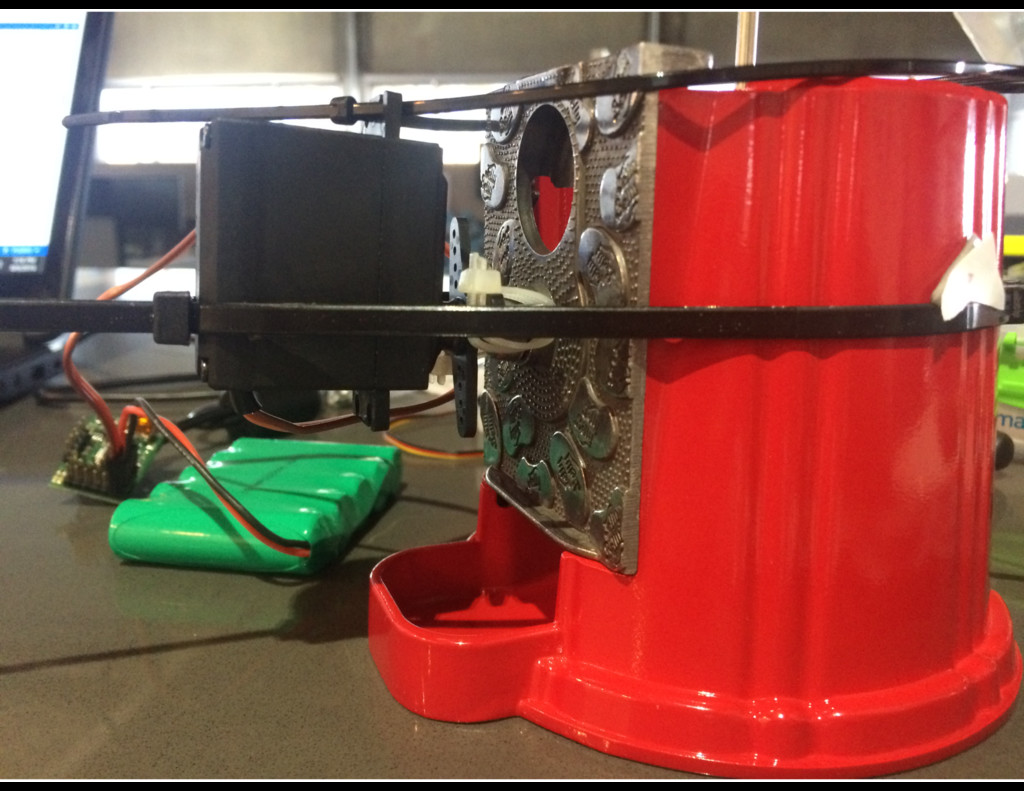
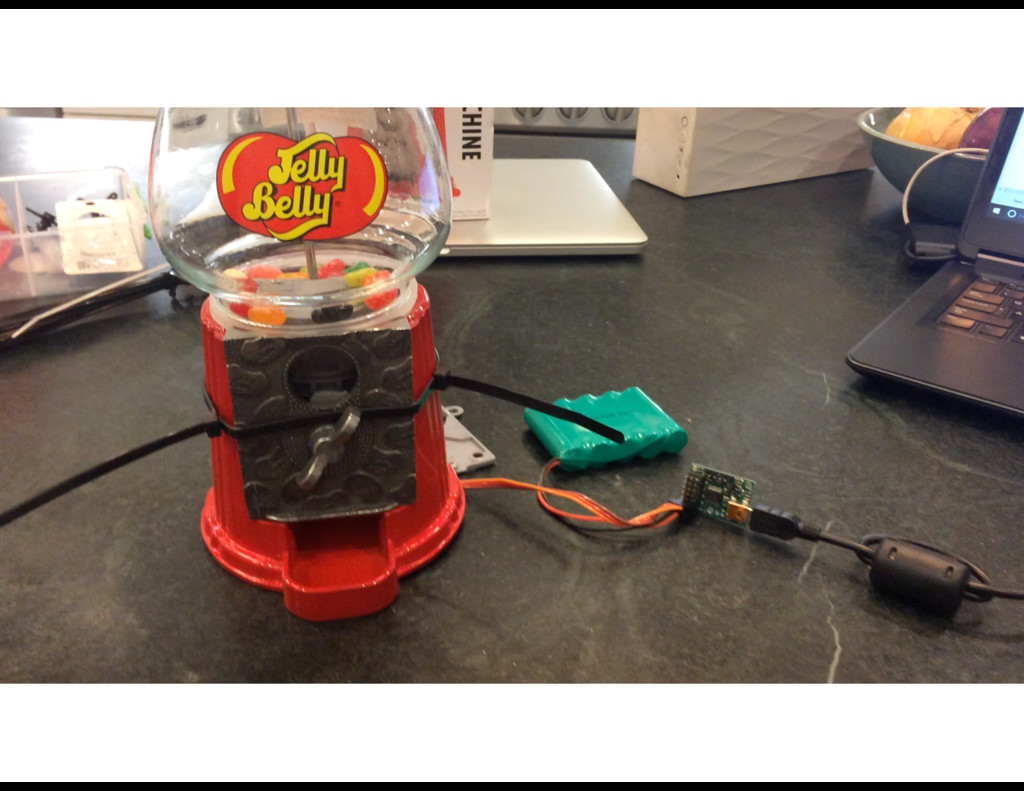
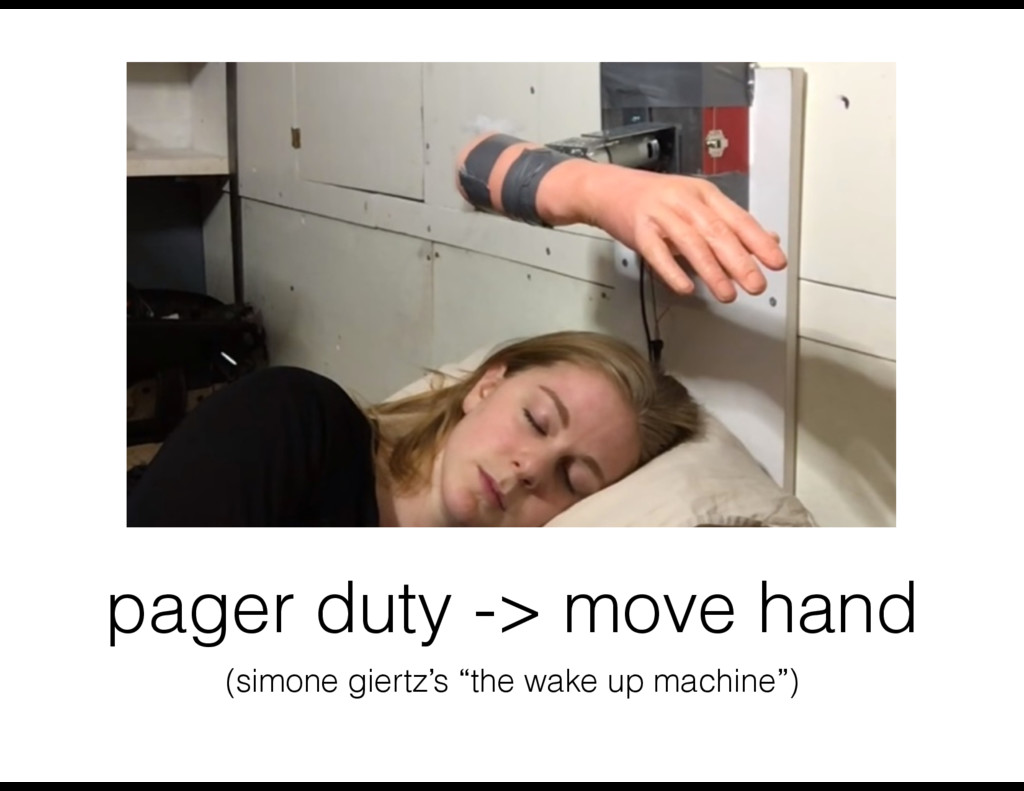
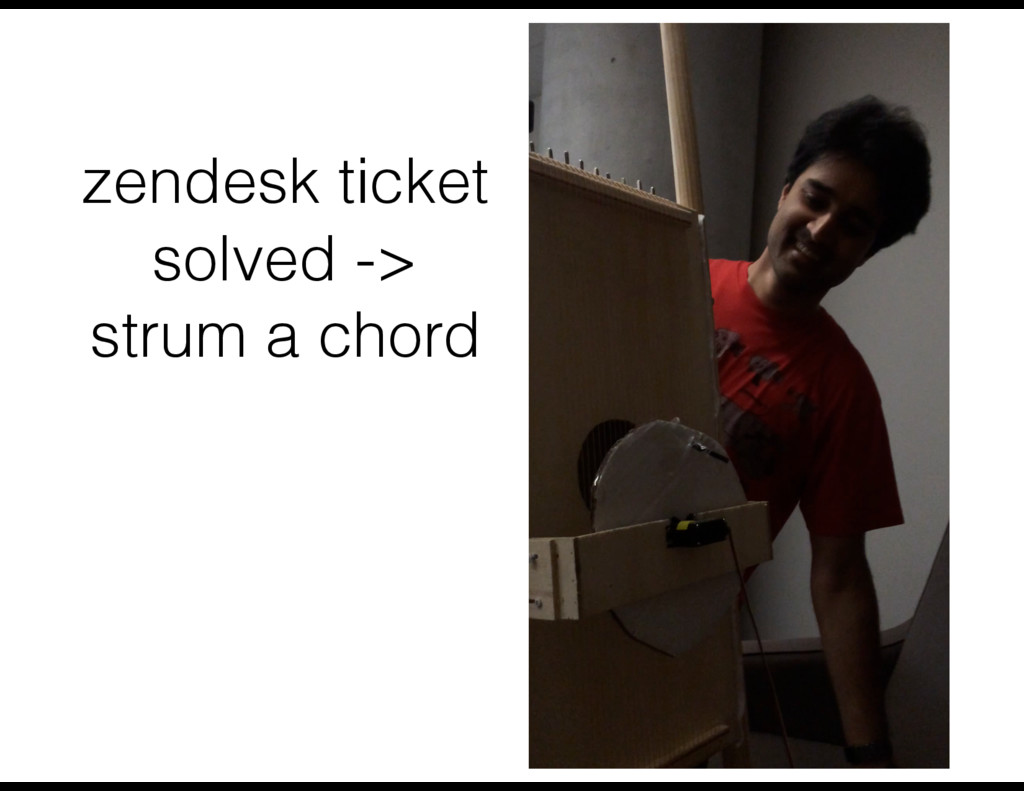
Can you hack your subconscious to motivate yourself to complete tasks? What if you got a physical reward every time you answered a support ticket, finished a draft, or reviewed a diff? This talk shows you how to use funky hardware, like candy dispensers, to program your own reward cycle. We'll hook up the hardware machines to some cloud-based APIs to trigger a pleasant experience every time you complete a task. Who knows -- you may find yourself buying dozens of candy machines for everyone at your office, just to hear the pleasant clink of productivity all day long as all your developers earn their Skittles. (First presented at That Conference 2016.)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}