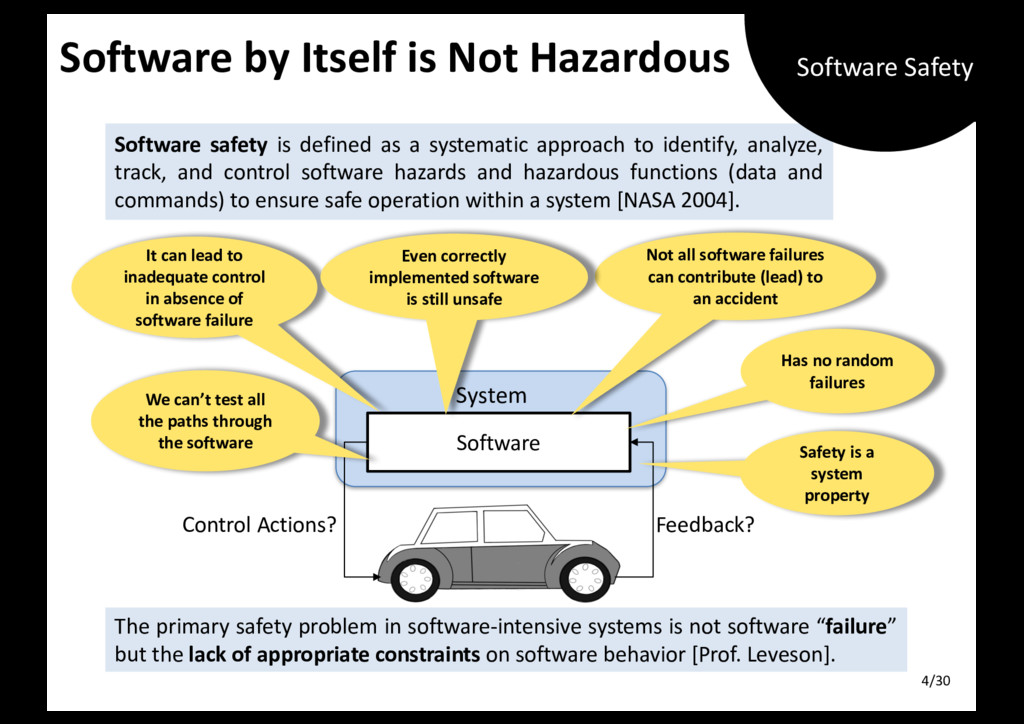
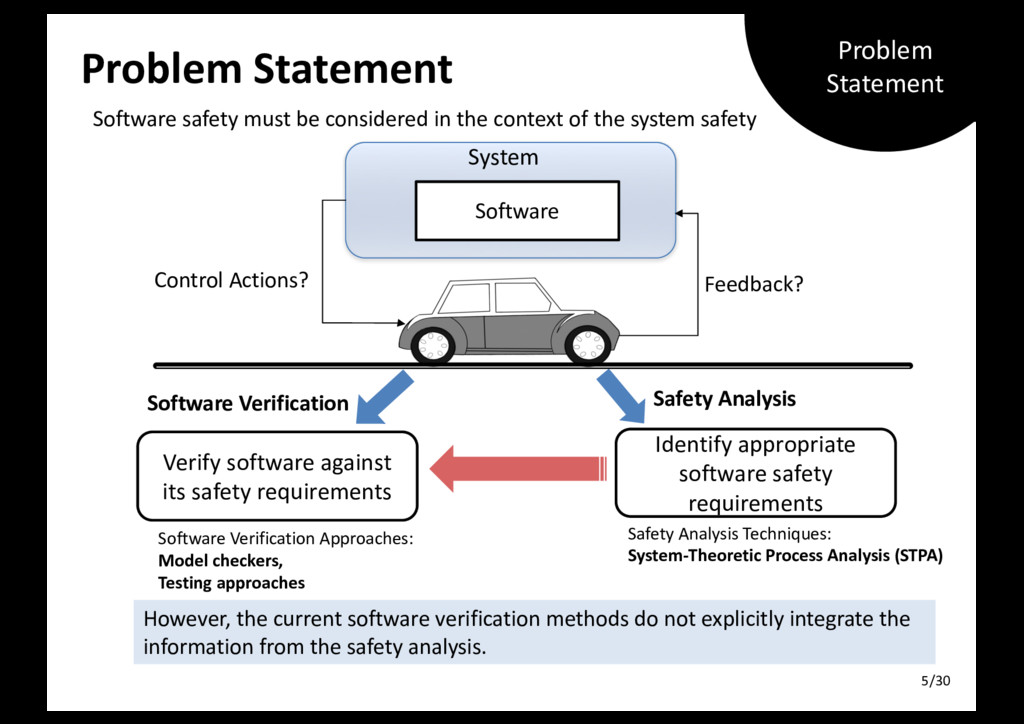
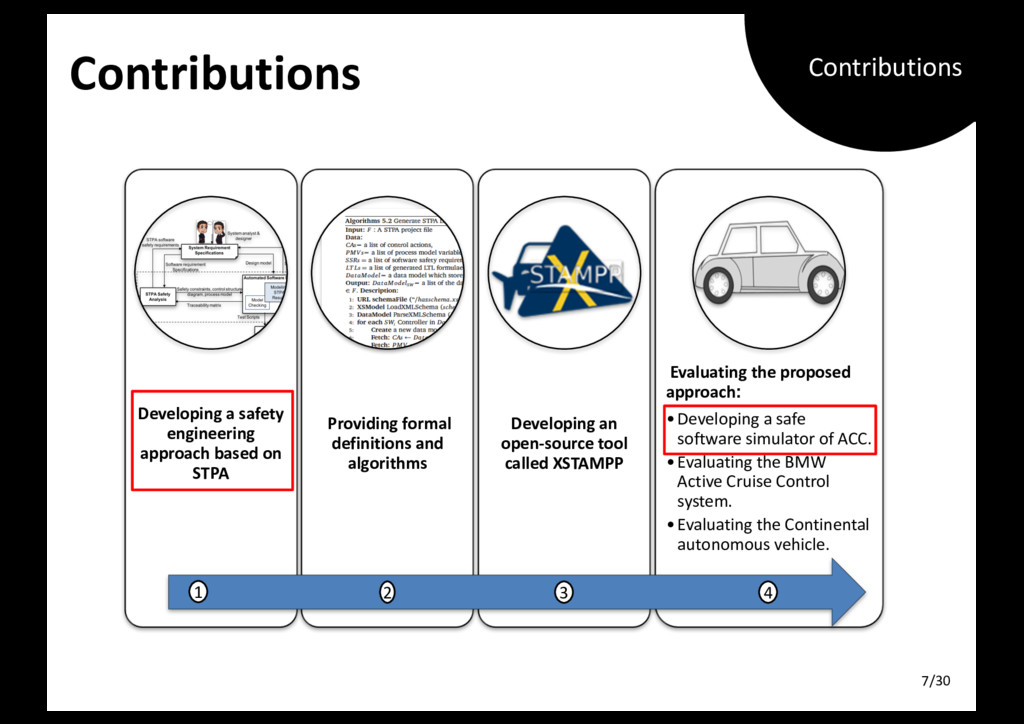
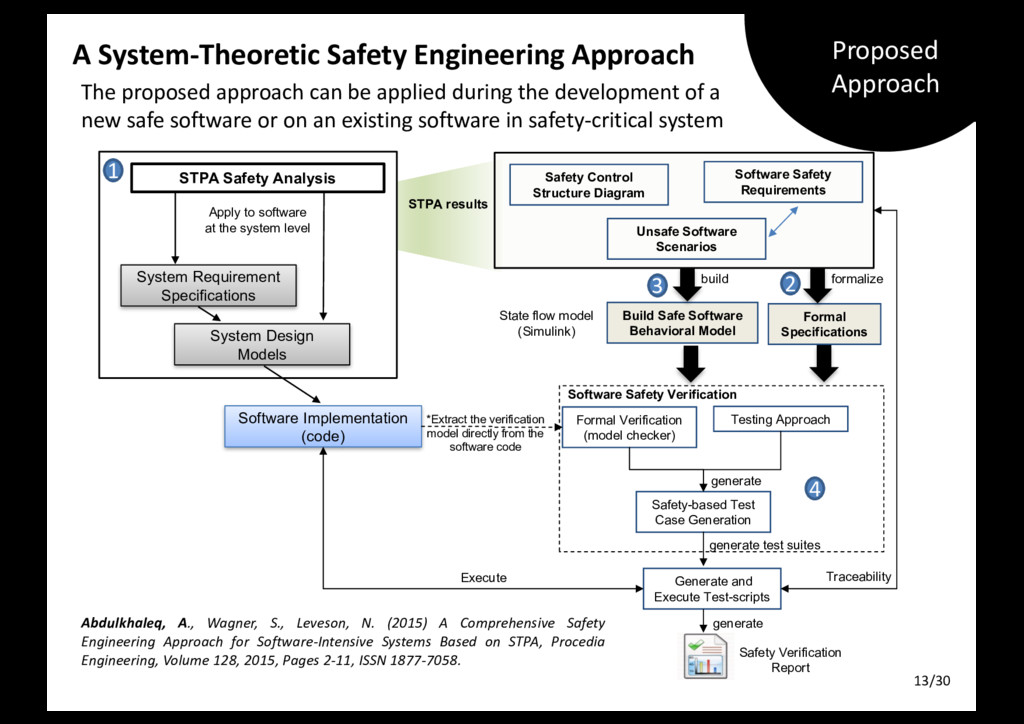
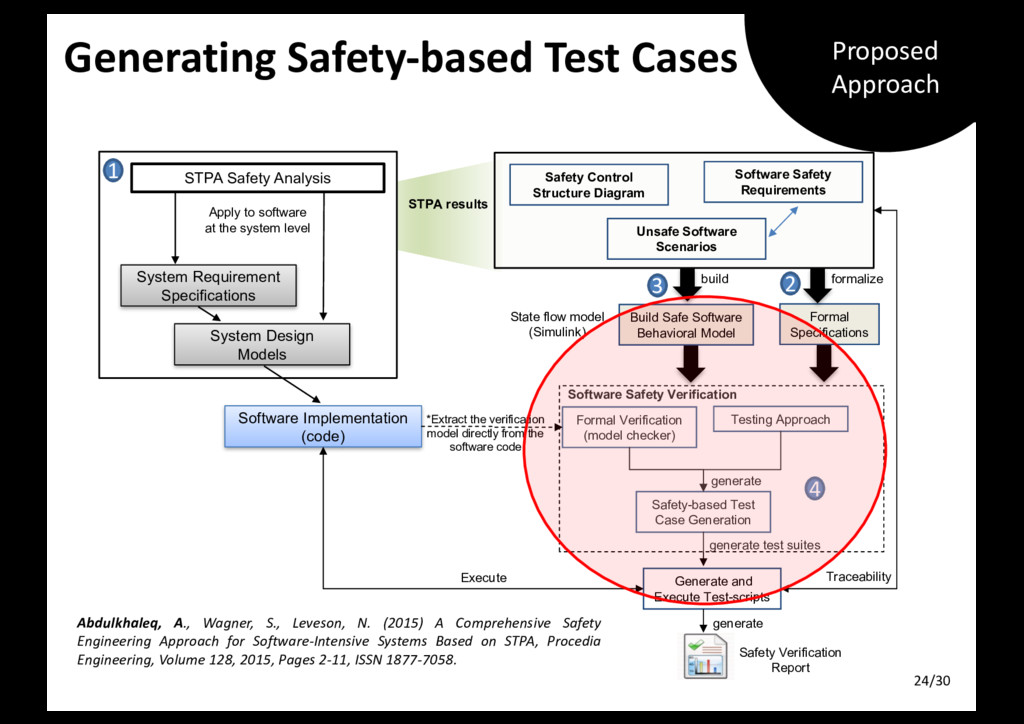
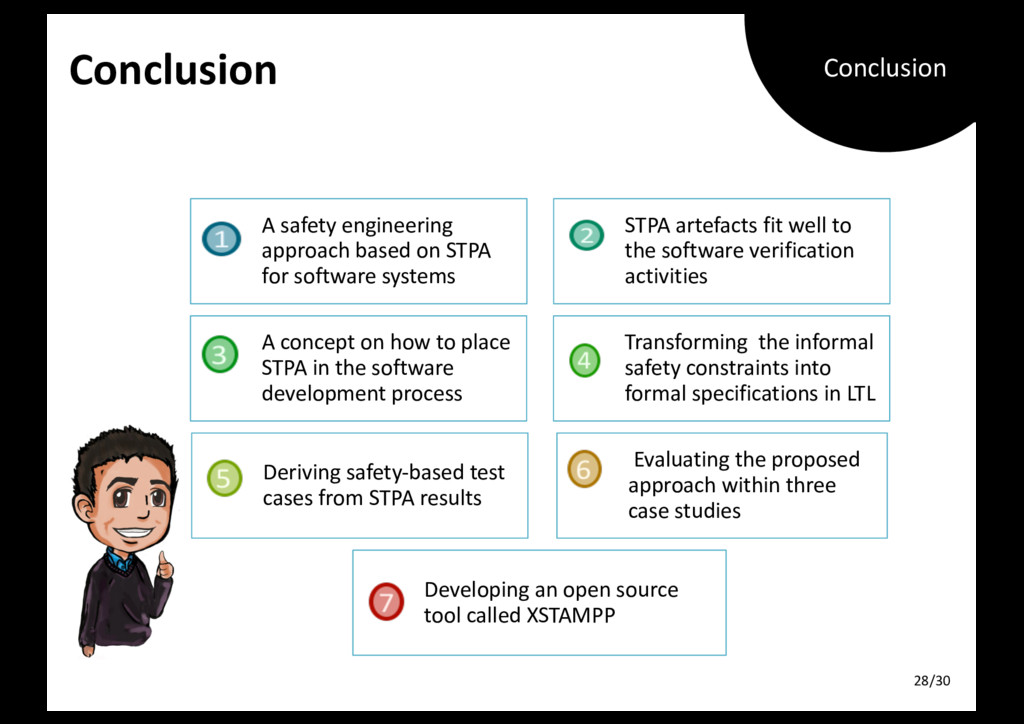
In the software development process, formal verification and functional testing are complementary approaches which are used to verify the functional correctness of software; however, even perfectly reliable software could lead to an accident. The correctness of software cannot ensure the safe operation of safety-critical software systems. Therefore, developing safety-critical software requires a more systematic software and safety engineering process that enables the software and safety engineers to recognize the potential software risks. For this purpose, this dissertation introduces a comprehensive safety engineering approach based on STPA for Software-Intensive Systems, called STPA SwISs, which provides seamless STPA safety analysis and software safety verification activities to allow the software and safety engineers to work together during the software development for safety-critical systems and help them to recognize the associated software risks at the system level.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}