Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Physical computing with GPIO Zero - Peterboroug...
Search
Ben Nuttall
November 24, 2015
Programming
6.7k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Physical computing with GPIO Zero - Peterborough coding evening
GPIO Zero talk given at Peterborough coding evening
Ben Nuttall
November 24, 2015
More Decks by Ben Nuttall
See All by Ben Nuttall
Numeronyms are obnoxious
bennuttall
0
510
Live Highlights in BBC iPlayer
bennuttall
0
160
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
230
Rapid prototyping in BBC News with Python and AWS
bennuttall
0
170
Running a Python Package Index for Raspberry Pi
bennuttall
0
190
From Acorns to Raspberries
bennuttall
0
170
Innovation in the newsroom
bennuttall
0
220
Innovation in the newsroom - MOS Running Order Manager
bennuttall
0
250
How to market your open source project
bennuttall
0
290
Other Decks in Programming
See All in Programming
AIエージェントで 変わるAndroid開発環境
takahirom
2
630
そのテスト、説明できますか?~LWテスト戦略FW~のご紹介
nakahara
0
200
はてなアカウント基盤 State of the Union
cockscomb
1
1.3k
【SRE NEXT 2026 Lunch Session】一人目専任SREの立ち上げを加速する ― AIと進めたオンボーディングで2分を0.04秒にした話
pkshadeck
PRO
0
2.5k
Even G2とAWSで推しのエージェントを召喚しよう!
har1101
1
170
任せる範囲はこう広がった / How the Scope of AI Delegation Has Expanded
nrslib
1
250
SREの積み重ねがAI駆動開発のガードレールになった ― 7つの実践/SRE Guardrails The 7
tomoyakitaura
8
4.2k
これからAgentCoreを触る方へ トレンドはGatewayです
har1101
6
490
AI駆動開発を妨げる技術的負債の解消アプローチ / ai-refactoring-approach
minodriven
17
9k
琵琶湖の水は止められてもNet--HTTPのリトライは止められない / You might be able to stop the water flow of Lake Biwa but you can't stop Net::HTTP retries
luccafort
PRO
0
330
AI がコードを書く時代における新卒エンジニアの仕事風景 (2026) / New Graduate Engineers in the Era of AI Coding (2026)
sushichan044
0
220
ランチタイムLT会3周年!ランチタイムLT会を3年間続けられたお話
y0hgi
1
140
Featured
See All Featured
Build The Right Thing And Hit Your Dates
maggiecrowley
39
3.3k
New Earth Scene 8
popppiees
3
2.4k
Rails Girls Zürich Keynote
gr2m
96
14k
The #1 spot is gone: here's how to win anyway
tamaranovitovic
3
1.1k
How STYLIGHT went responsive
nonsquared
100
6.2k
Impact Scores and Hybrid Strategies: The future of link building
tamaranovitovic
0
340
sira's awesome portfolio website redesign presentation
elsirapls
0
300
Imperfection Machines: The Place of Print at Facebook
scottboms
270
14k
The Cult of Friendly URLs
andyhume
79
6.9k
How to train your dragon (web standard)
notwaldorf
97
6.7k
What's in a price? How to price your products and services
michaelherold
247
13k
Practical Orchestrator
shlominoach
191
11k
Transcript
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
Ben Nuttall • Education Developer Advocate at the Raspberry Pi
Foundation – Software & project development – Learning resources & teacher training – Outreach • Hobbyist turned employee • Based in Cambridge (but from the North) • @ben_nuttall on Twitter
Python – RPi.GPIO import RPi.GPIO as GPIO from time import
sleep GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) led = 17 GPIO.setup(led, GPIO.OUT) while True: GPIO.output(led, True) sleep(1) GPIO.output(led, False) sleep(1)
Python – GPIO Zero from gpiozero import LED from time
import sleep led = LED(17) while True: led.on() sleep(1) led.off() sleep(1)
LED from gpiozero import LED from time import sleep led
= LED(17) led.on() # on led.off() # off led.toggle() # on>off or off>on led.blink() # flash on/off continuously
LED + Button from gpiozero import LED, Button led =
LED(17) button = Button(3) button.when_pressed = led.on button.when_released = led.off
Source + Values from gpiozero import LED, Button led =
LED(17) button = Button(3) led.source = button.values
LED - PWM from gpiozero import PWMLED from time import
sleep led = PWMLED(17) led.on() # on led.off() # off led.value = 0.5 # half brightness
Motion sensor from gpiozero import LED, MotionSensor led = LED(2)
sensor = MotionSensor(3) sensor.when_motion = led.on sensor.when_no_motion = led.off
Light sensor from gpiozero import LED, LightSensor led = LED(2)
sensor = LightSensor(3) while True: sensor.wait_for_light() print("It's light!") sensor.wait_for_dark() print("It's dark")
Traffic Lights from gpiozero import TrafficLights lights = TrafficLights(9, 10,
11) lights.on() # all on lights.off() # all off lights.red.on() # red on lights.toggle() # swap state of all lights
Traffic Lights sequence lights.green.on() lights.amber.off() lights.red.off() while True: sleep(10) lights.green.off()
lights.amber.on() sleep(1) lights.amber.off() lights.red.on() sleep(10) lights.amber.on() sleep(1) lights.green.on() lights.amber.off() lights.red.off()
TrafficHat from gpiozero import TrafficHat th = TrafficHat() th.lights.red.on() th.lights.amber.on()
th.button.when_pressed = th.on th.button.when_released = th.off
TrafficHat - PWM from gpiozero import TrafficHat th = TrafficHat(pwm=True)
th.lights.red.value = 0.2 th.lights.amber.value = 0.4 th.lights.green.value = 0.8
Push button stop motion from gpiozero import Button from picamera
import PiCamera button = Button(4) with PiCamera() as camera: camera.start_preview() frame = 1 while True: button.wait_for_press() camera.capture('/home/pi/frame%03d.jpg' % frame) frame += 1
Full colour LED from gpiozero import RGBLED led = RGBLED(2,
3, 4) led.red.on() # full red led.color = (1, 0, 1) # purple led.blue = 0.3 # dim the blue value to 0.3 # now (1, 0, 0.3)
Motor from gpiozero import Motor from time import sleep motor
= Motor(forward=17, backward=18) while True: motor.forward() sleep(5) motor.backward() sleep(5)
Robot from gpiozero import Robot from time import sleep robot
= Robot(left=(17, 18), right=(22, 23)) while True: robot.forward() sleep(10) robot.left() sleep(1)
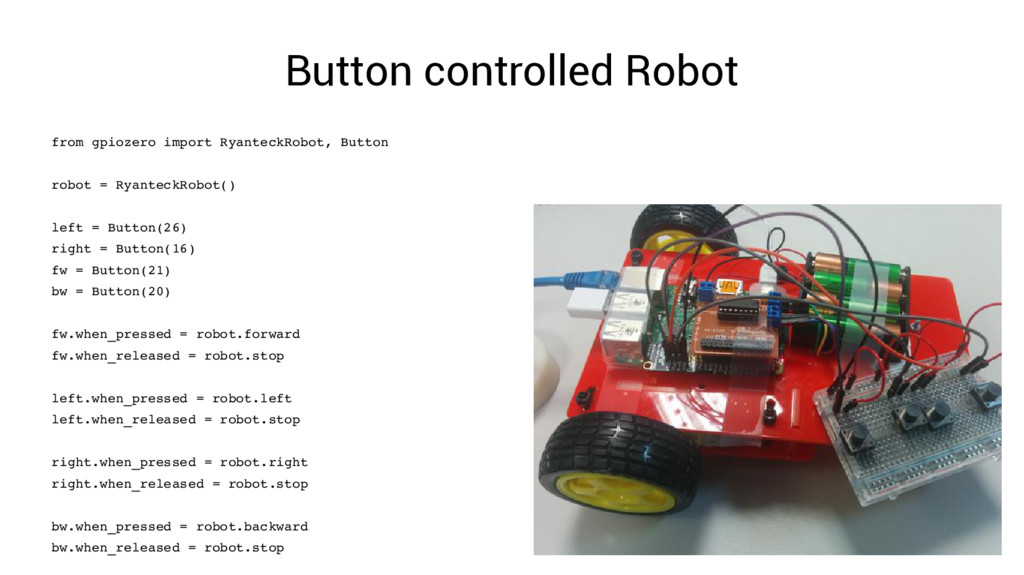
Button controlled Robot from gpiozero import RyanteckRobot, Button robot =
RyanteckRobot() left = Button(26) right = Button(16) fw = Button(21) bw = Button(20) fw.when_pressed = robot.forward fw.when_released = robot.stop left.when_pressed = robot.left left.when_released = robot.stop right.when_pressed = robot.right right.when_released = robot.stop bw.when_pressed = robot.backward bw.when_released = robot.stop
Analogue - potentiometers from gpiozero import MCP3008 pot = MCP3008()
while True: print(pot.value)
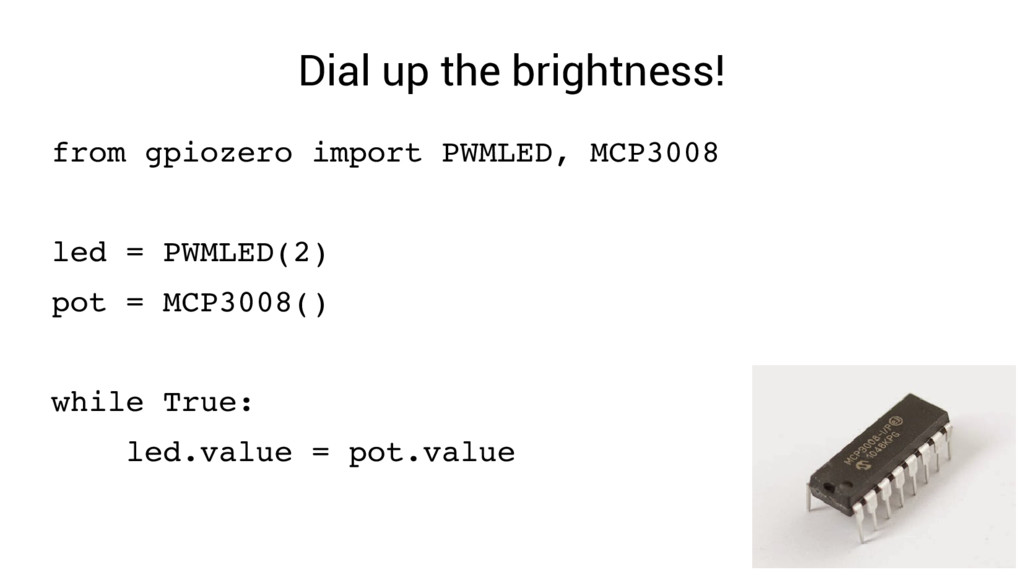
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() while True: led.value = pot.value
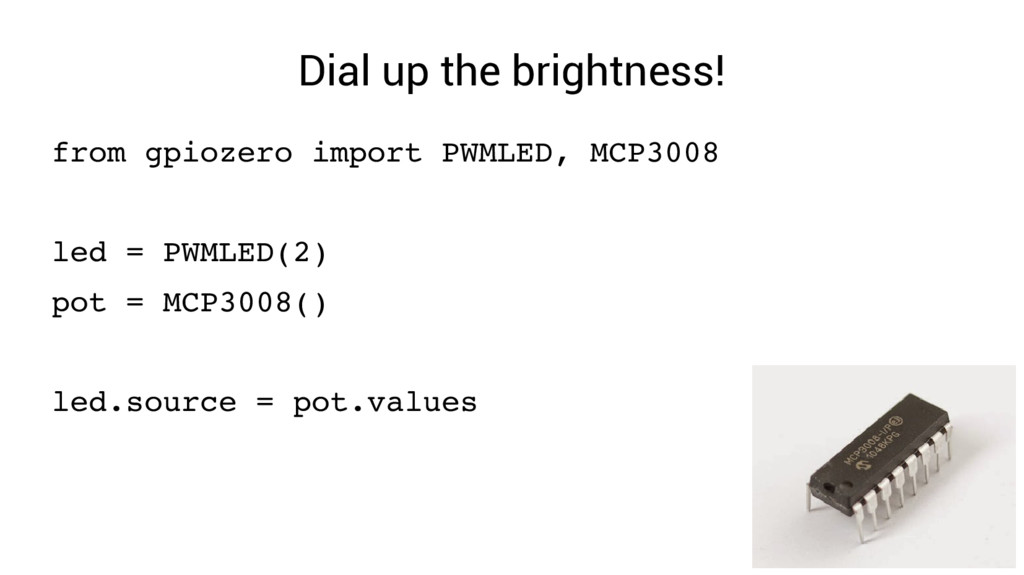
Dial up the brightness! from gpiozero import PWMLED, MCP3008 led
= PWMLED(2) pot = MCP3008() led.source = pot.values
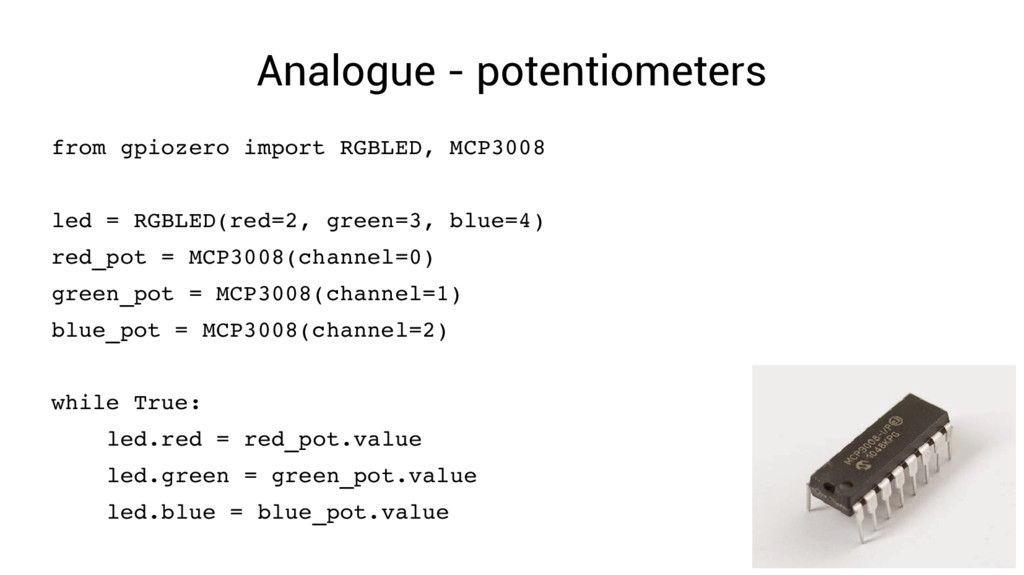
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) while True: led.red = red_pot.value led.green = green_pot.value led.blue = blue_pot.value
Analogue - potentiometers from gpiozero import RGBLED, MCP3008 led =
RGBLED(red=2, green=3, blue=4) red_pot = MCP3008(channel=0) green_pot = MCP3008(channel=1) blue_pot = MCP3008(channel=2) led.red.source = red_pot.values led.green.source = green_pot.values led.blue.source = blue_pot.values
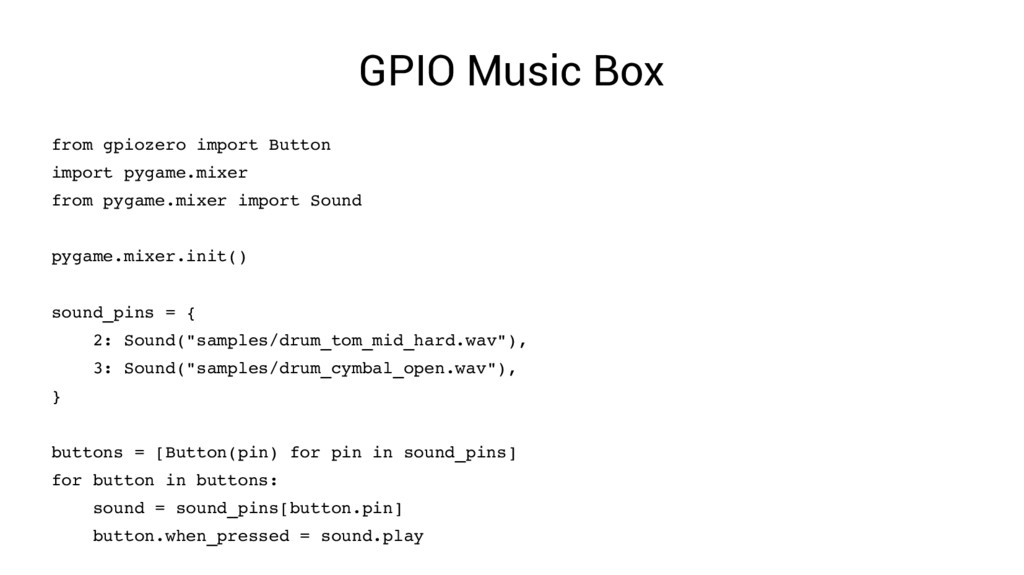
GPIO Music Box from gpiozero import Button import pygame.mixer from
pygame.mixer import Sound pygame.mixer.init() sound_pins = { 2: Sound("samples/drum_tom_mid_hard.wav"), 3: Sound("samples/drum_cymbal_open.wav"), } buttons = [Button(pin) for pin in sound_pins] for button in buttons: sound = sound_pins[button.pin] button.when_pressed = sound.play
GPIO Zero - beta • www.pythonhosted.org/gpiozero – Installation instructions –
Documentation – Examples • GitHub Issues – Suggestions – Feedback • Contact me –
[email protected]
– @ben_nuttall on Twitter • #gpiozero on Twitter
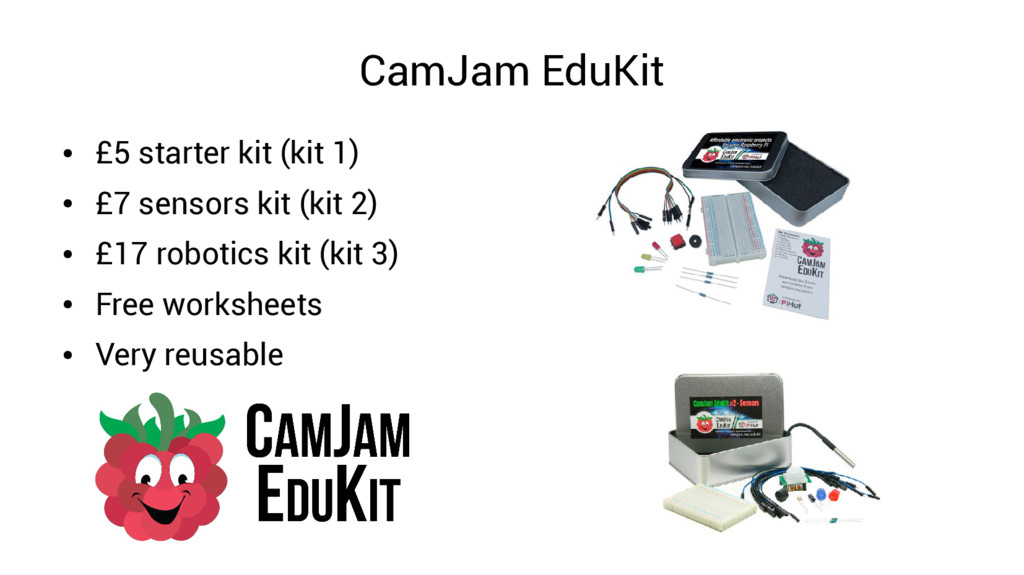
CamJam EduKit • £5 starter kit (kit 1) • £7
sensors kit (kit 2) • £17 robotics kit (kit 3) • Free worksheets • Very reusable
Raspberry Pi blog
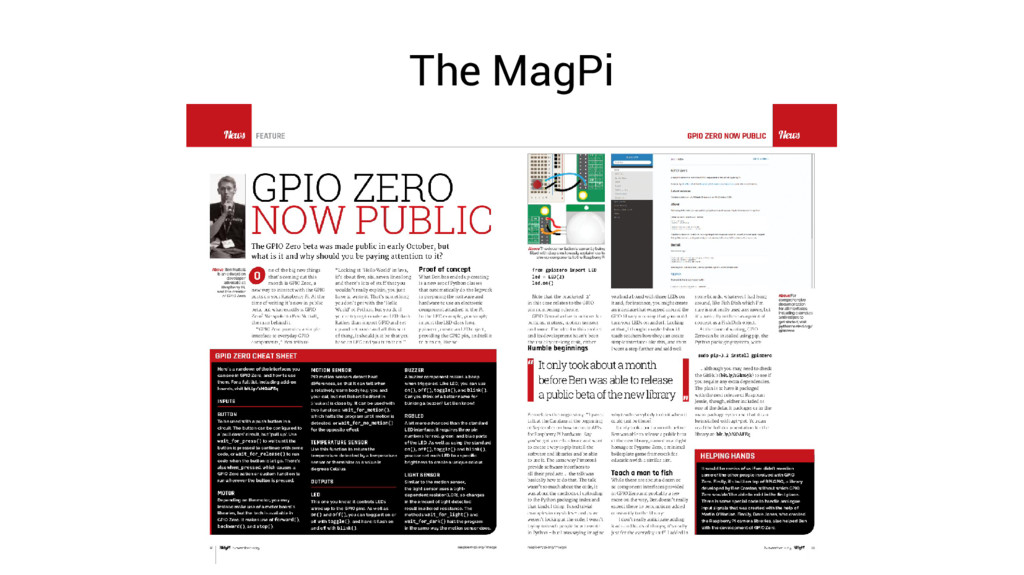
The MagPi
The MagPi
The MagPi
Physical computing with GPIO Zero Ben Nuttall Raspberry Pi Foundation
UK Charity 1129409
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}