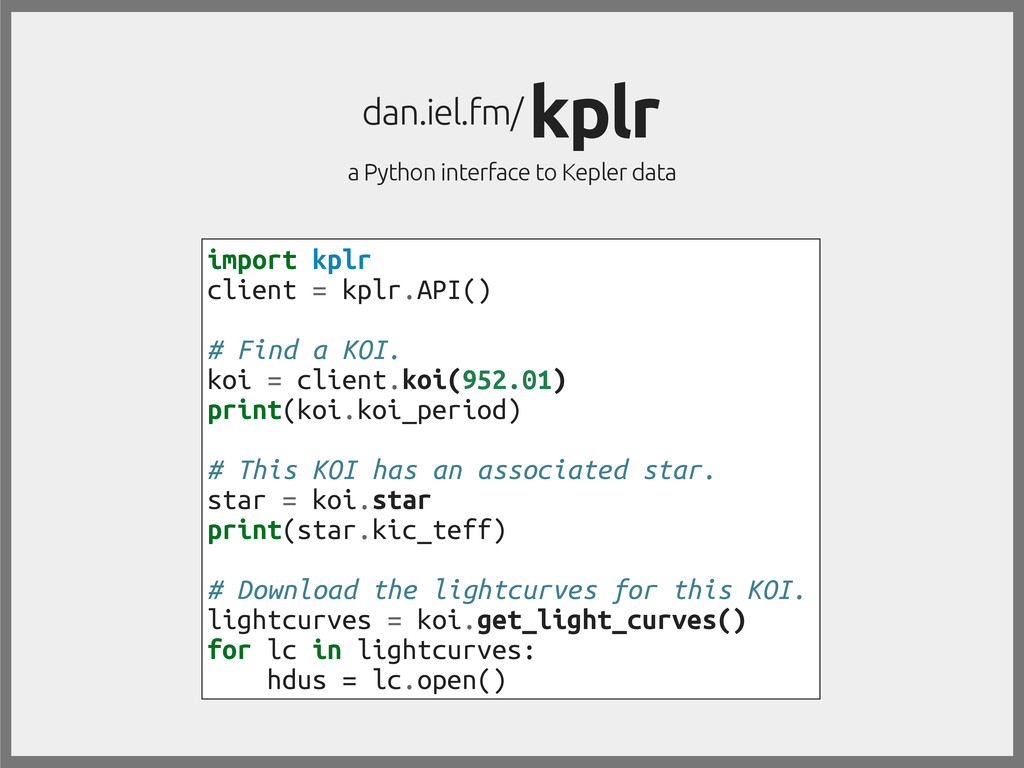
= client.koi(952.01) print(koi.koi_period) # This KOI has an associated star. star = koi.star print(star.kic_teff) # Download the lightcurves for this KOI. lightcurves = koi.get_light_curves() for lc in lightcurves: hdus = lc.open() a Python interface to Kepler data kplr dan.iel.fm/
for modeling exoplanet observations WORK IN PROGRESS flexible + fast limb darkening (C) Gaussian process likelihood (C++) expressive model building syntax (Python) simple interface to fitting software (Python)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![relative aperture photometry [ppm] Object: Kepler-37](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_18.jpg){kind=link}
!["corrected" aperture photometry [ppm] Object: Kepler-37](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_19.jpg){kind=link}
!["corrected" aperture photometry [ppm] Object: KIC 3641858](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_20.jpg){kind=link}
!["corrected" aperture photometry [ppm] Object: KIC 8415109](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![relative aperture photometry [ppm] Object: Kepler-62 how do you get](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
!["corrected" aperture photometry [ppm] Object: Kepler-37 Cool story. I can](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_43.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![ln p(Y | ✓) = 1 2 [y ˆ y]TV](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_62.jpg){kind=link}
![ln p(Y | ✓) = 1 2 [y ˆ y]TV](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_63.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![relative aperture photometry [ppm] Object: Kepler-37 What about Kepler? Too](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_78.jpg){kind=link}
{kind=link}
{kind=link}
![relative aperture photometry [ppm] Object: Kepler-37](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_81.jpg){kind=link}
![relative aperture photometry [ppm] Object: Kepler-37](https://files.speakerdeck.com/presentations/b9423370dad30130dbe16a7701161f8b/slide_82.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}