TMPA-2017: Tools and Methods of Program Analysis
3-4 March, 2017, Hotel Holiday Inn Moscow Vinogradovo, Moscow
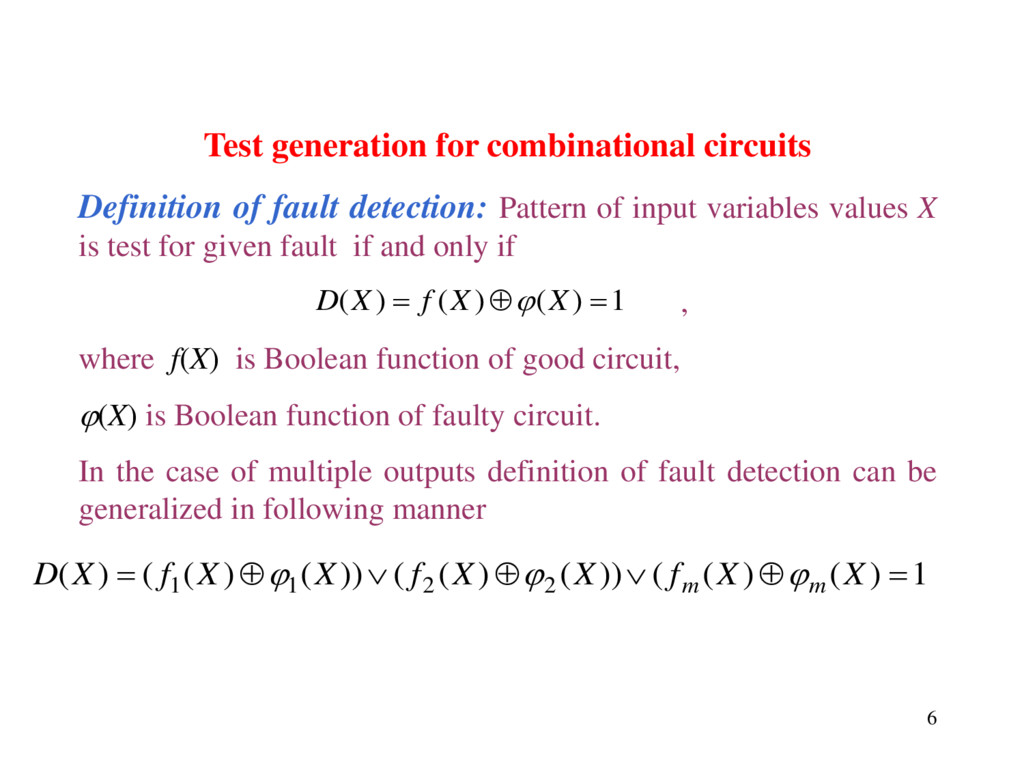
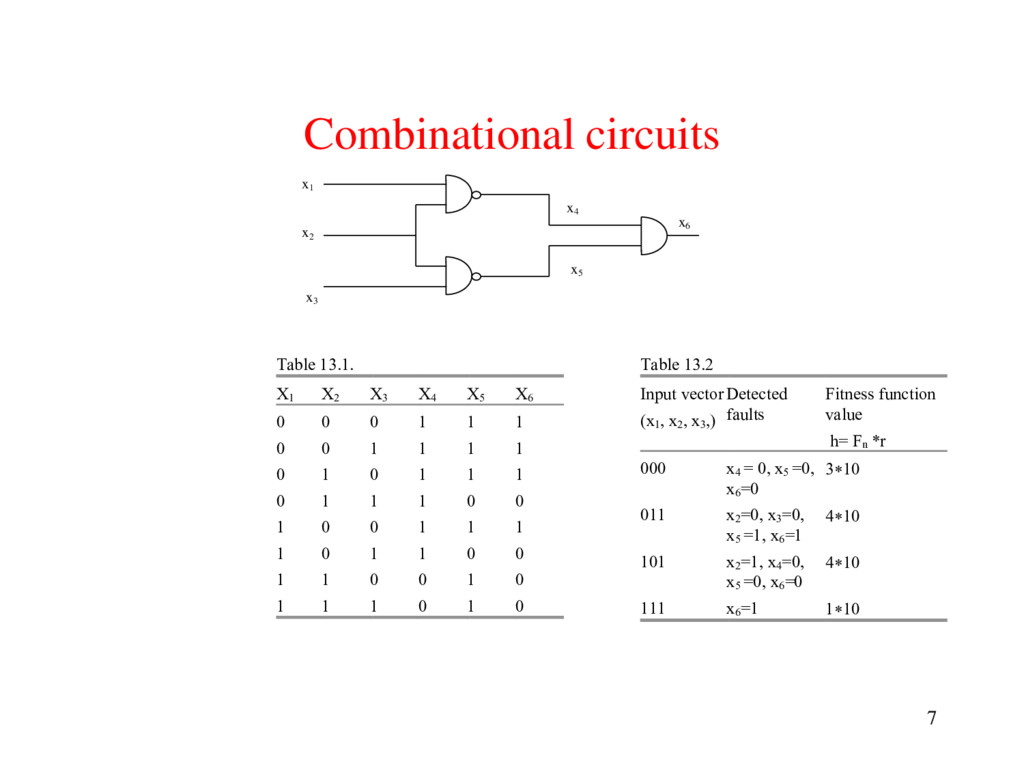
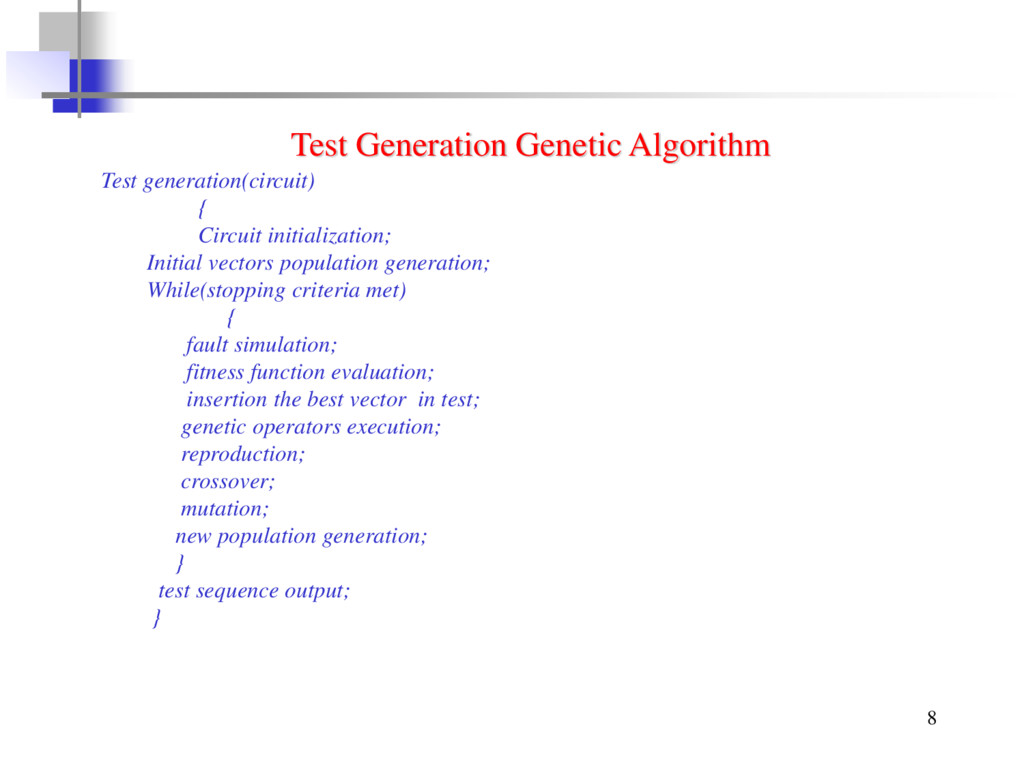
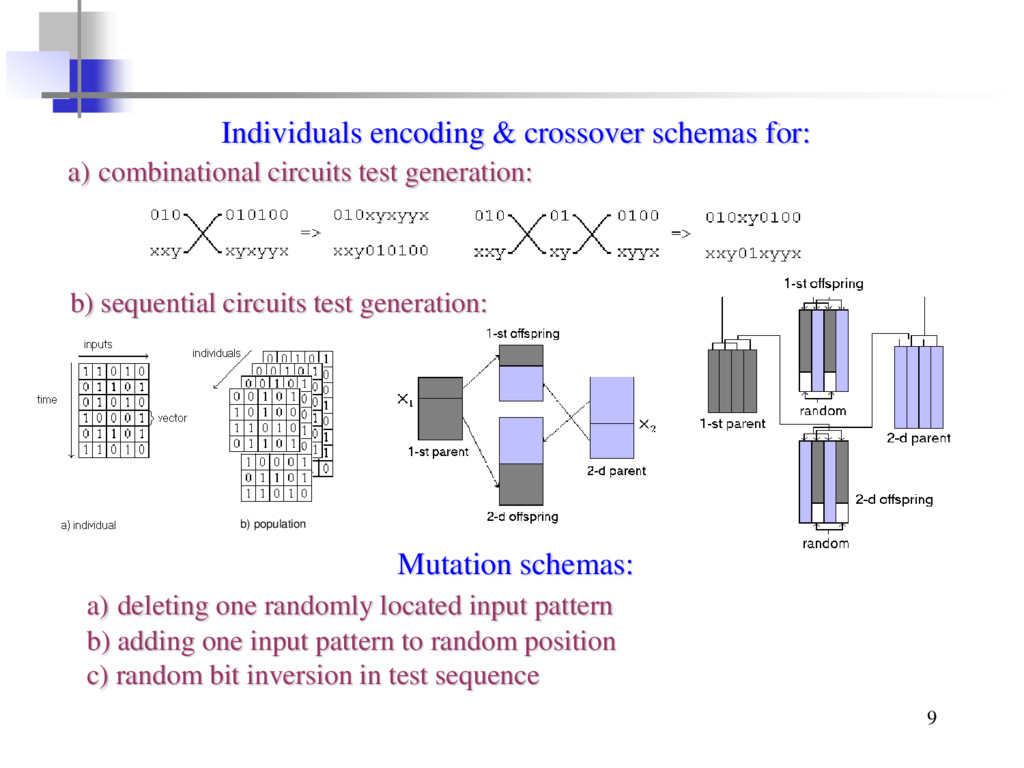
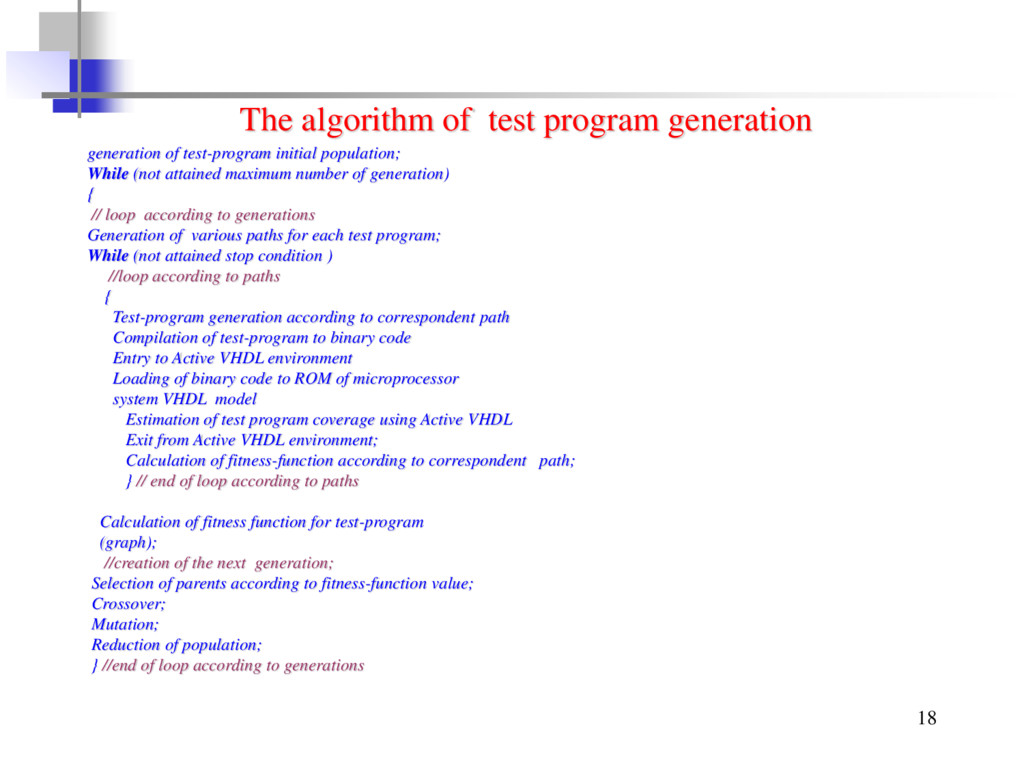
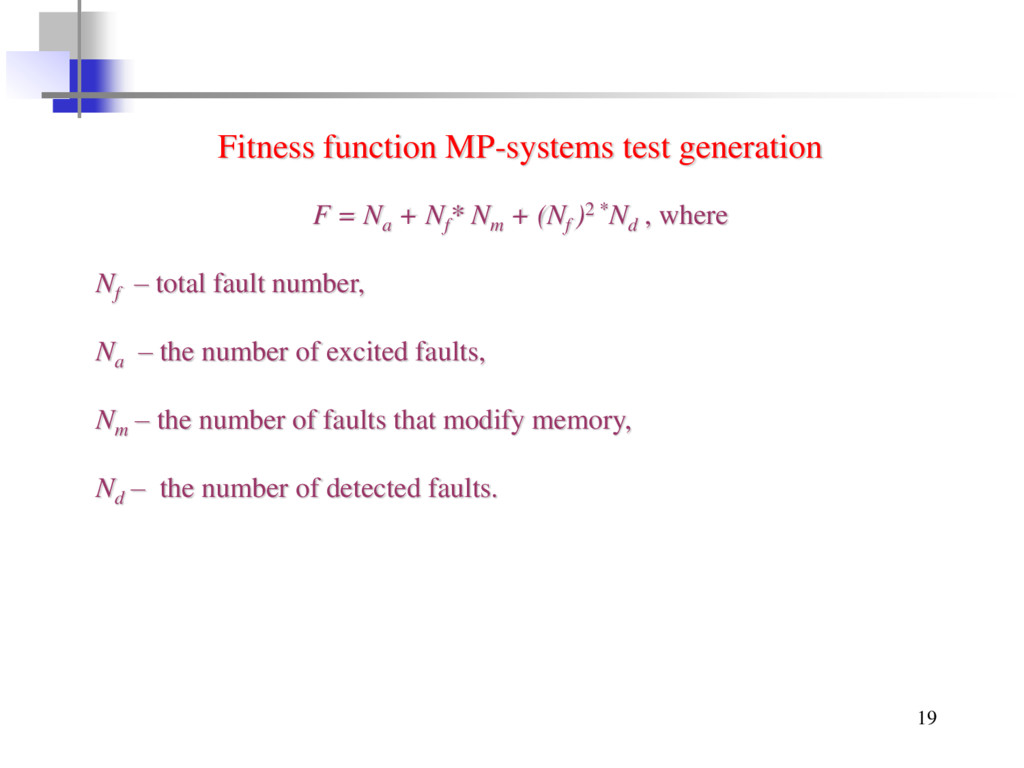
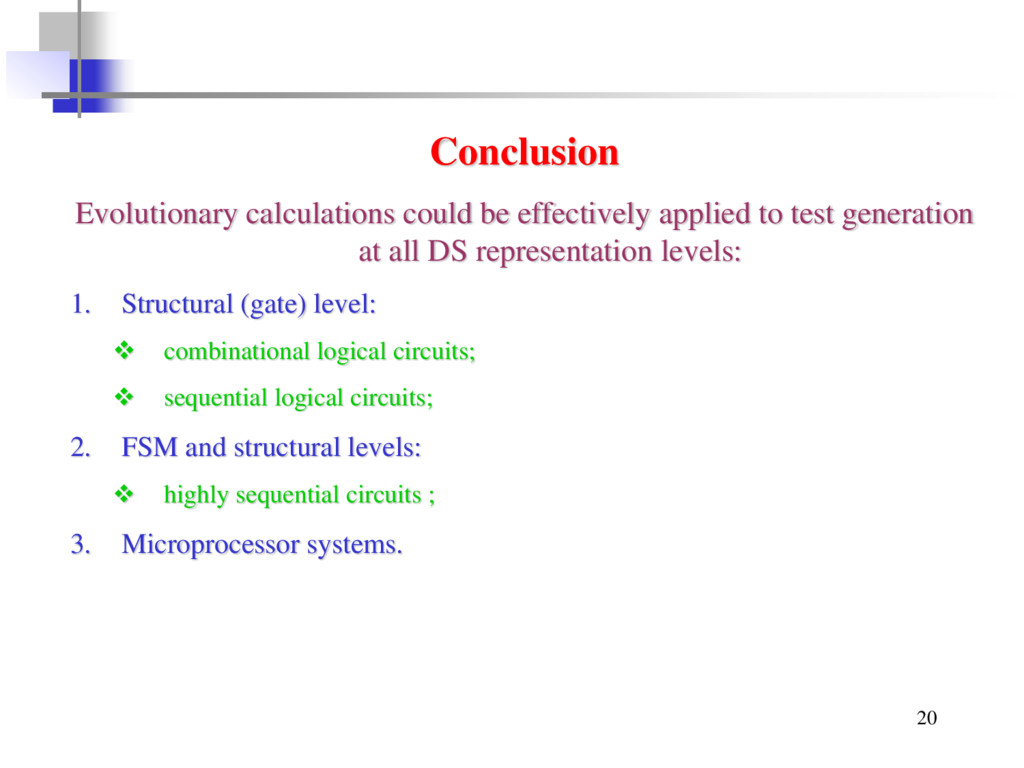
Evolutionary Algorithms in Test Generation for digital systems
Yuriy Skobtsov, Vadim Skobtsov, St.Petersburg Polytechnic University
For presentation follow the link: https://www.youtube.com/watch?v=gUnKmPg614k
Would like to know more?
Visit our website:
www.tmpaconf.org
www.exactprosystems.com/events/tmpa
Follow us:
https://www.linkedin.com/company/exactpro-systems-llc?trk=biz-companies-cym
https://twitter.com/exactpro
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}