Share
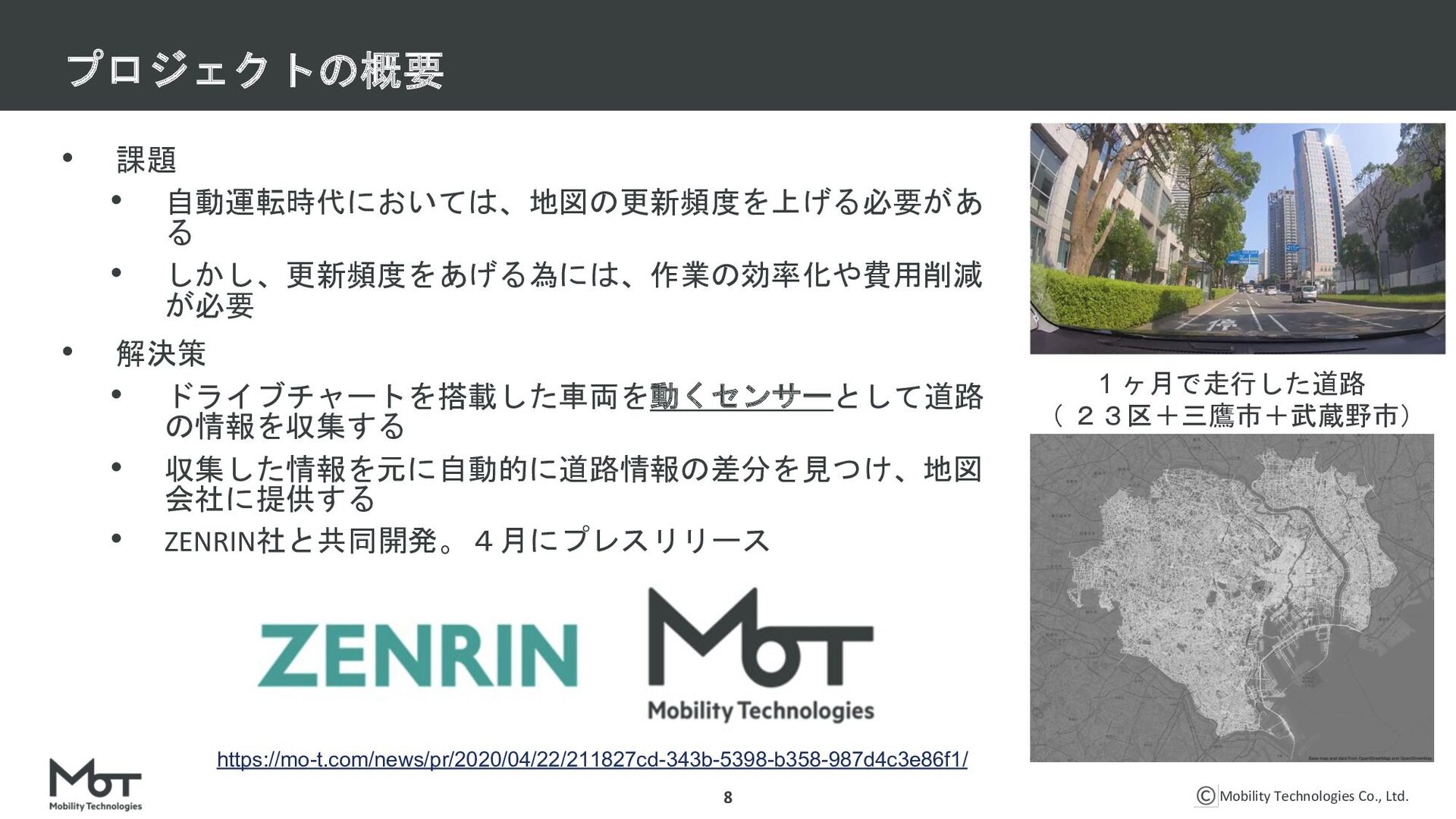
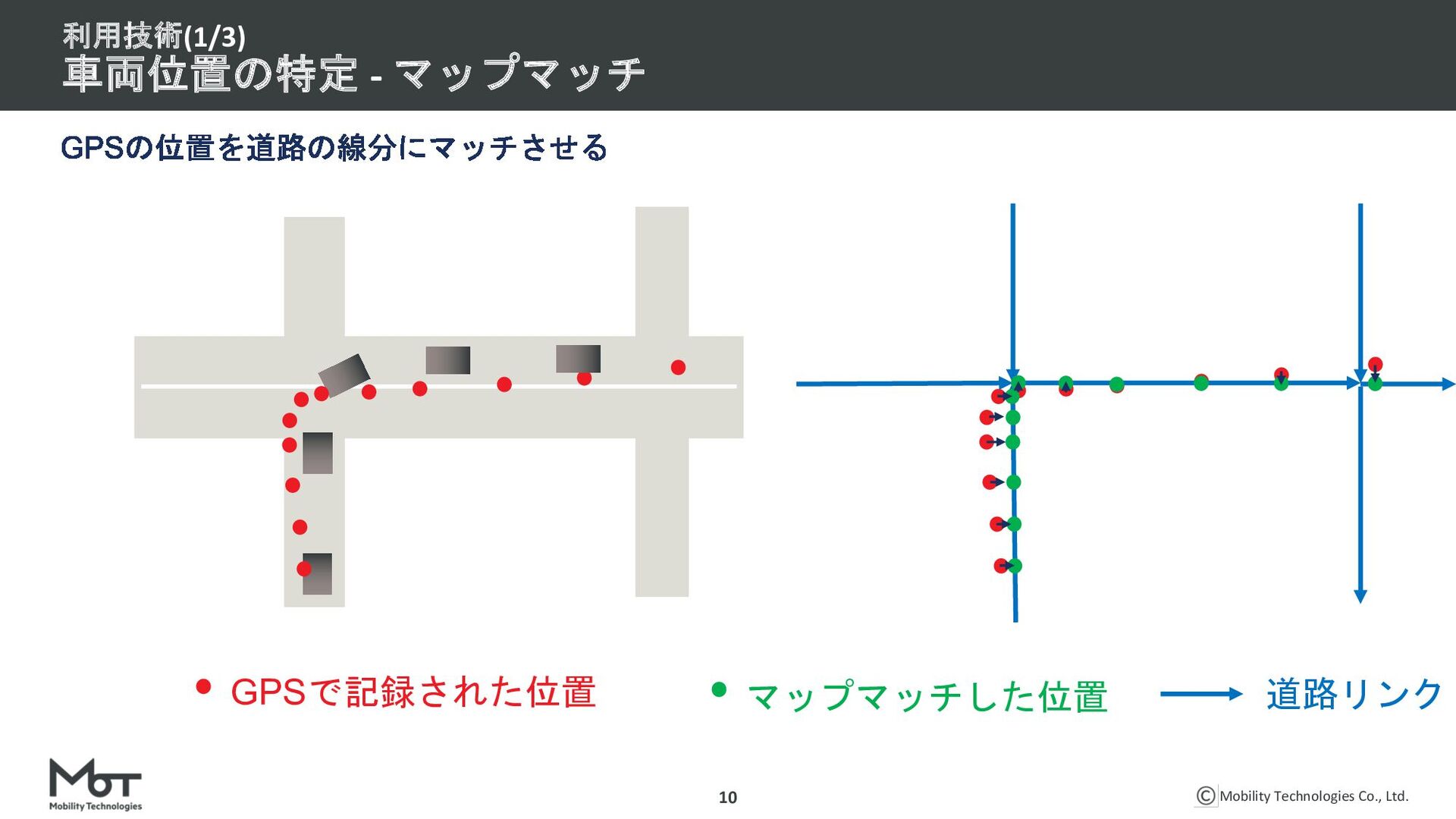
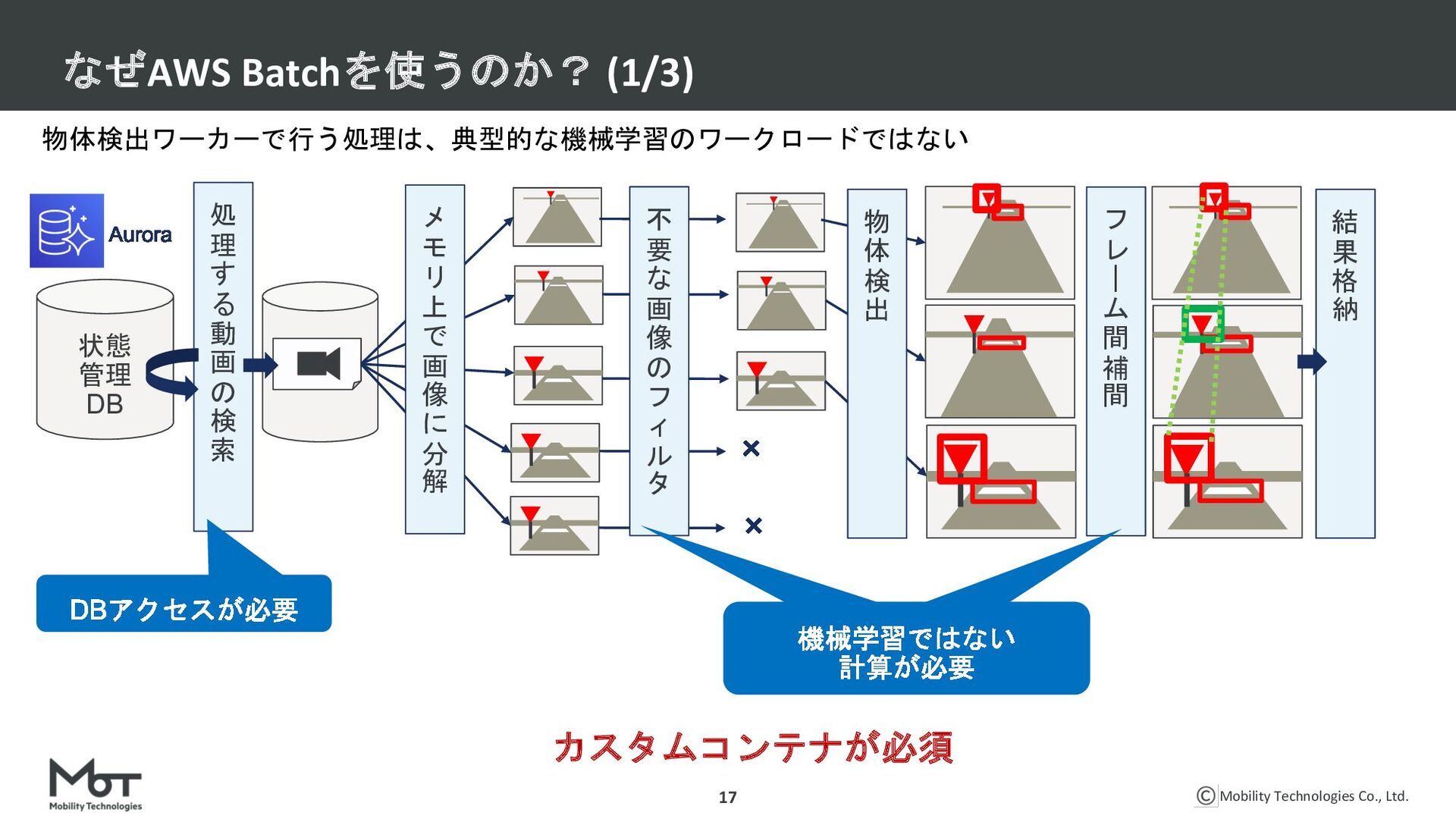
Mobility Technologiesではドライブレコーダの画像認識による道路情報の自動差分抽出プロジェクトを実施しています。大量の動画に対して効率よく機械学習推論を行う必要があり、これをどのように実現しようとしているかを説明します。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}