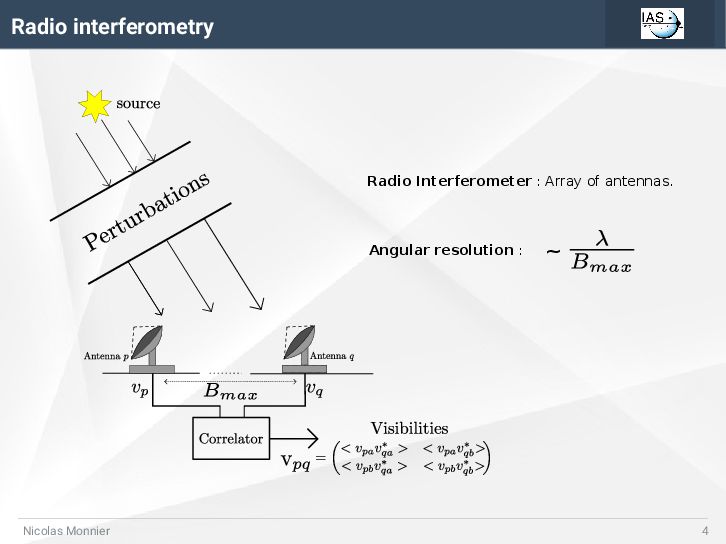
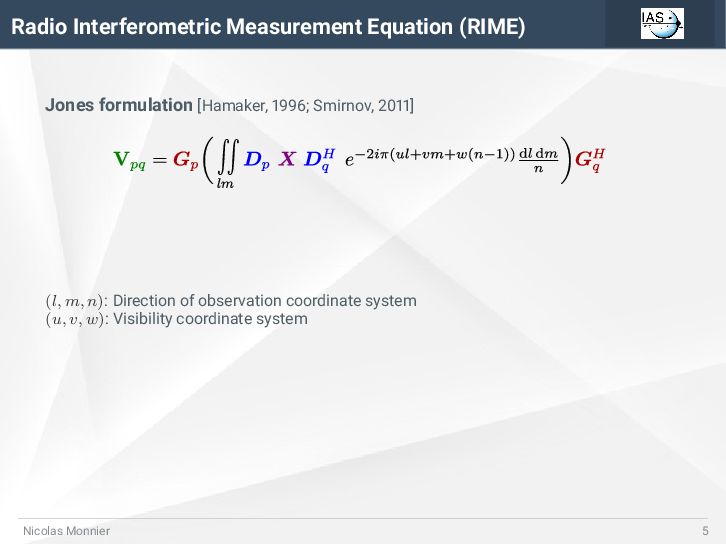
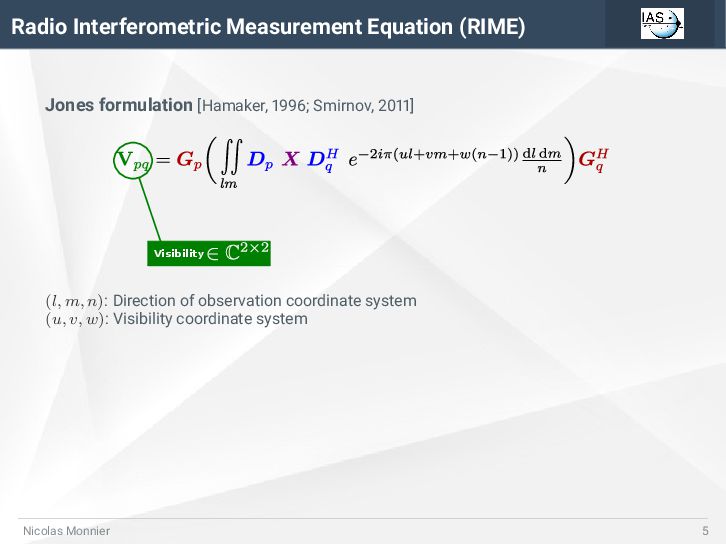
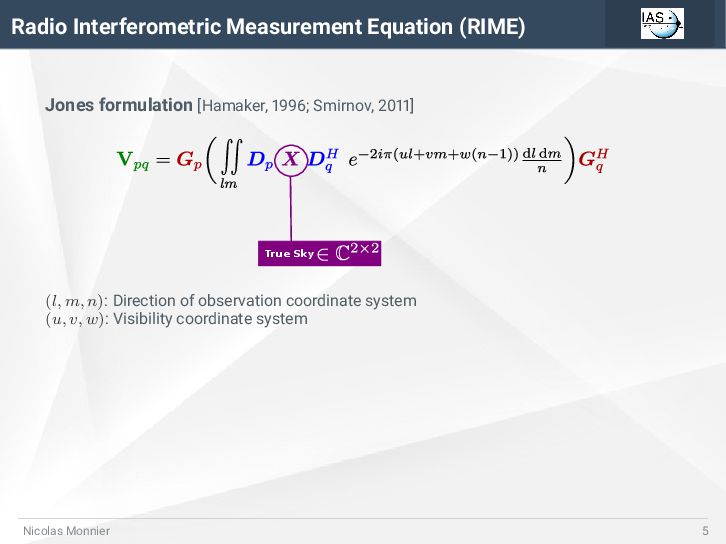
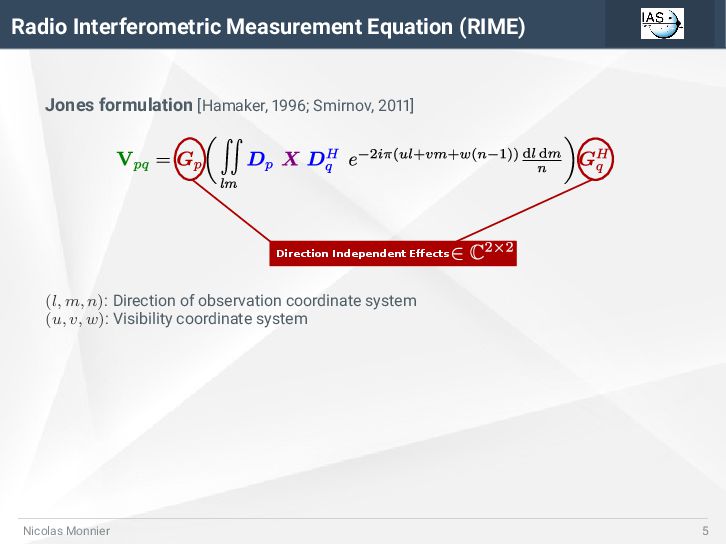
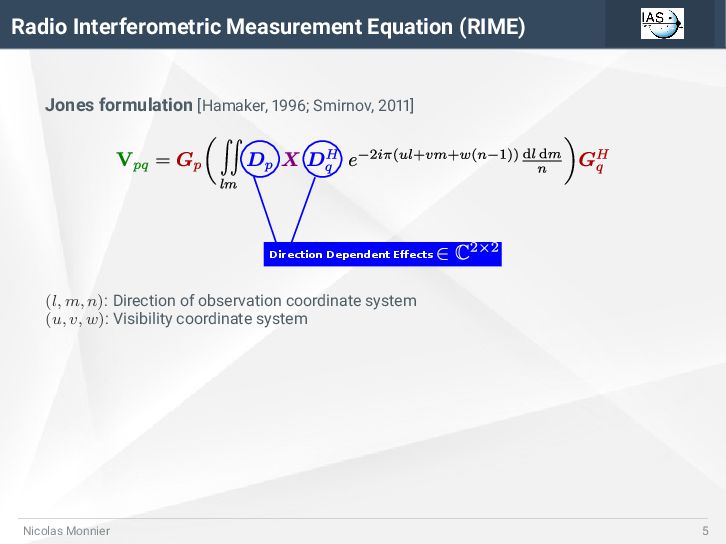
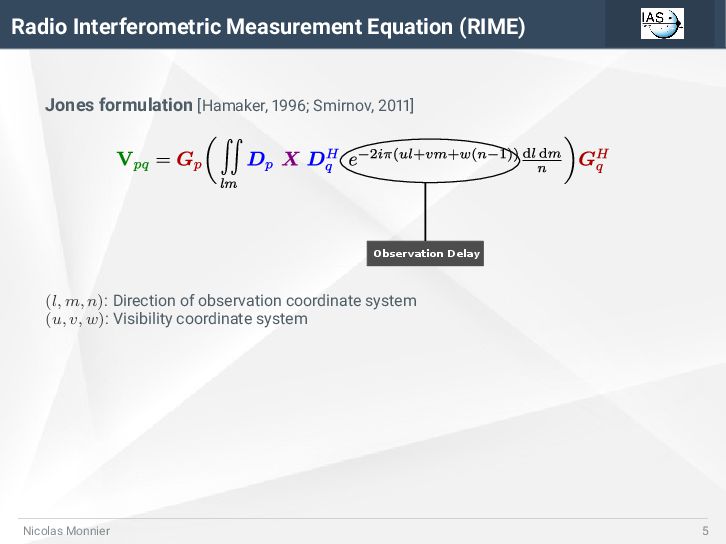
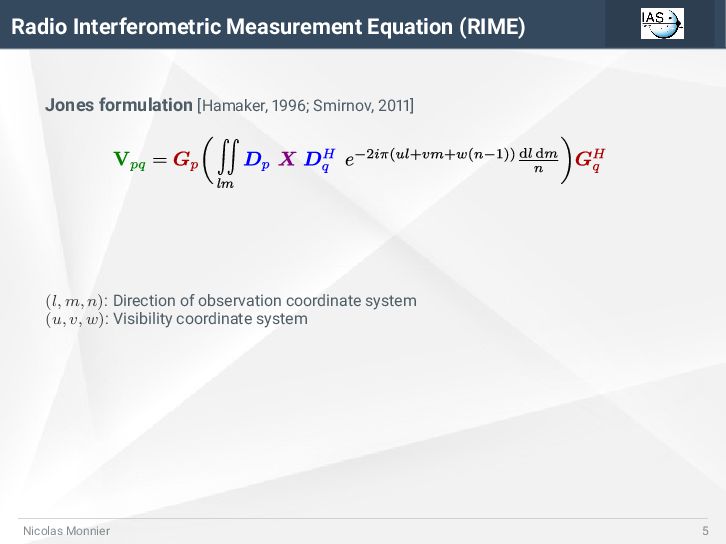
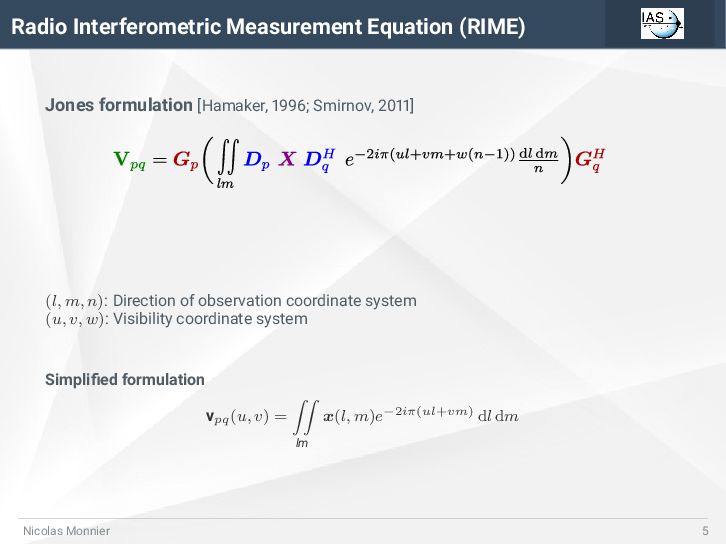
2011] (l, m, n): Direction of observation coordinate system (u, v, w): Visibility coordinate system Simplified formulation vpq(u, v) = lm x(l, m)e−2iπ(ul+vm) dl dm Nicolas Monnier 5
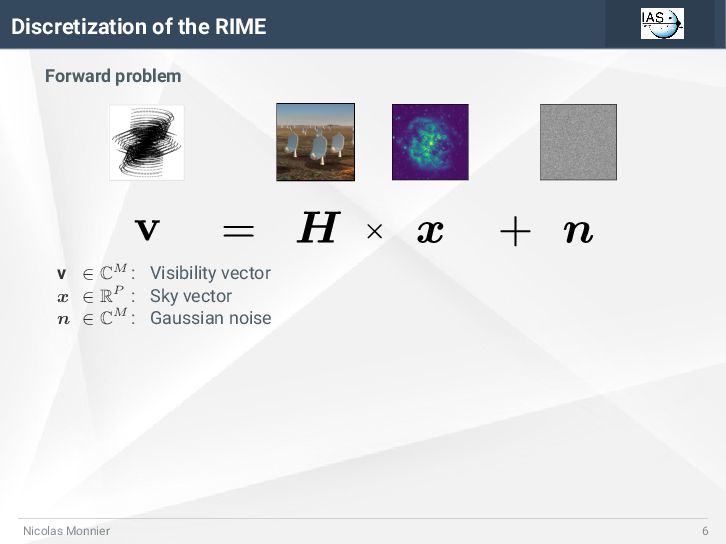
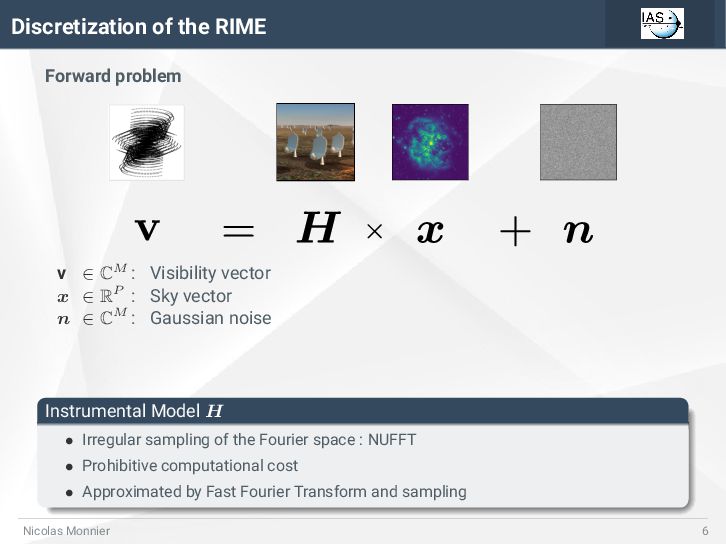
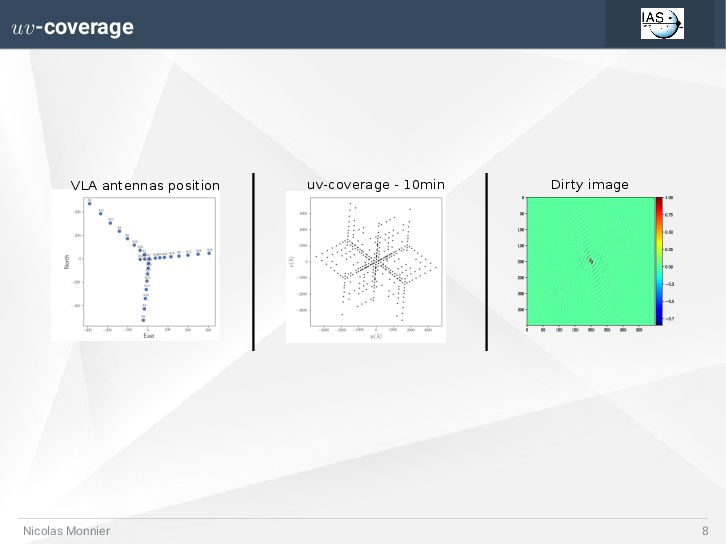
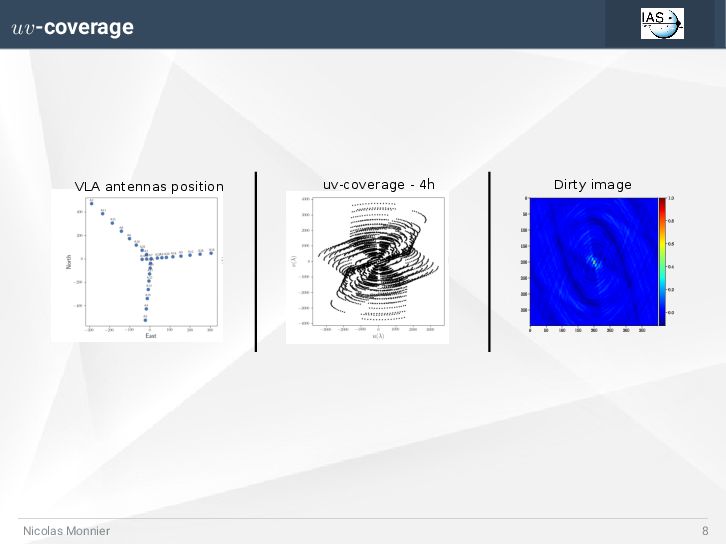
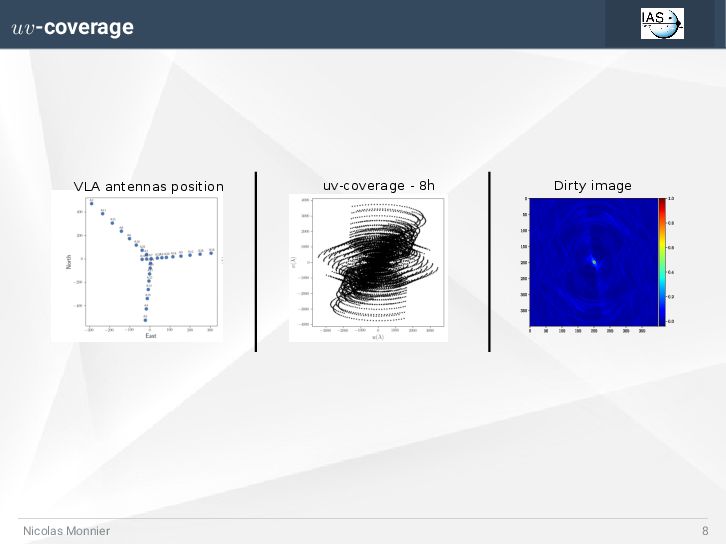
110.000 Antennas v ∈ CM : Visibility vector x ∈ RP : Sky vector n ∈ CM : Gaussian noise Instrumental Model H • Irregular sampling of the Fourier space : NUFFT • Prohibitive computational cost • Approximated by Fast Fourier Transform and sampling Nicolas Monnier 6
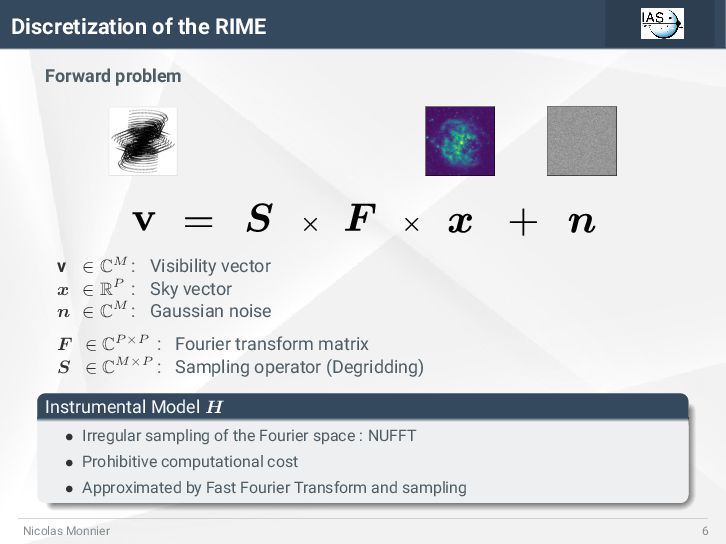
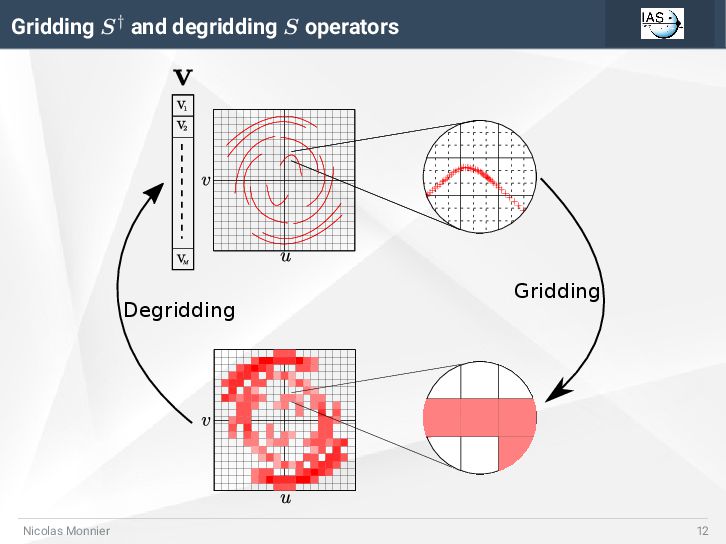
Visibility vector x ∈ RP : Sky vector n ∈ CM : Gaussian noise F ∈ CP ×P : Fourier transform matrix S ∈ CM×P : Sampling operator (Degridding) Instrumental Model H • Irregular sampling of the Fourier space : NUFFT • Prohibitive computational cost • Approximated by Fast Fourier Transform and sampling Nicolas Monnier 6
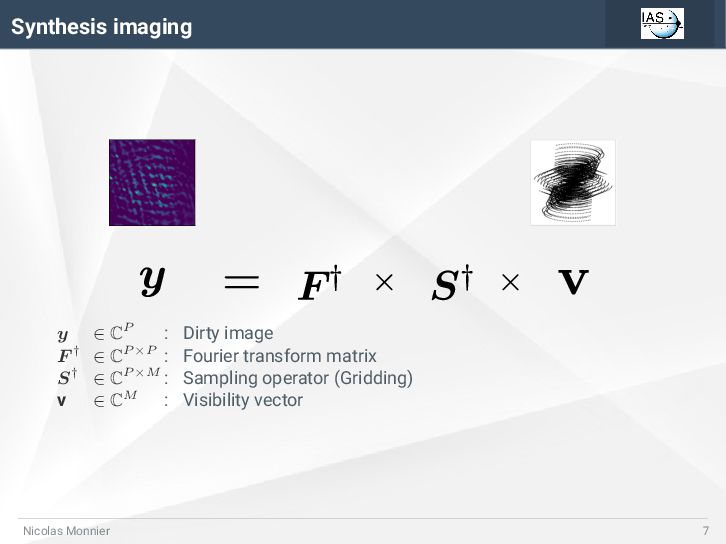
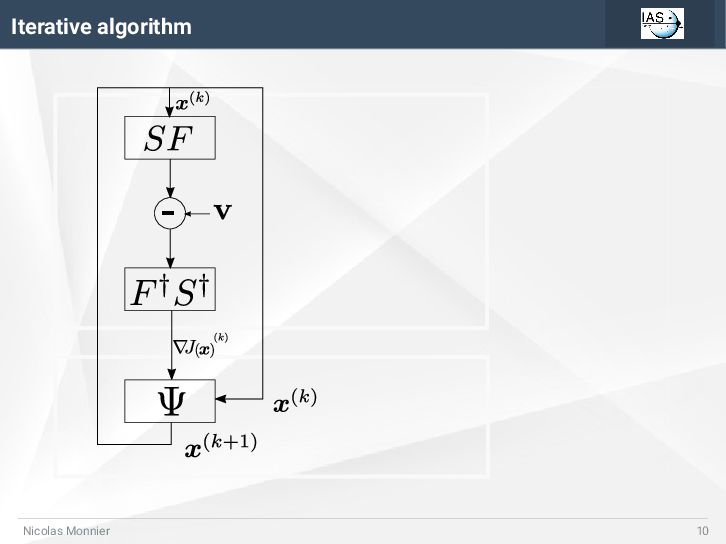
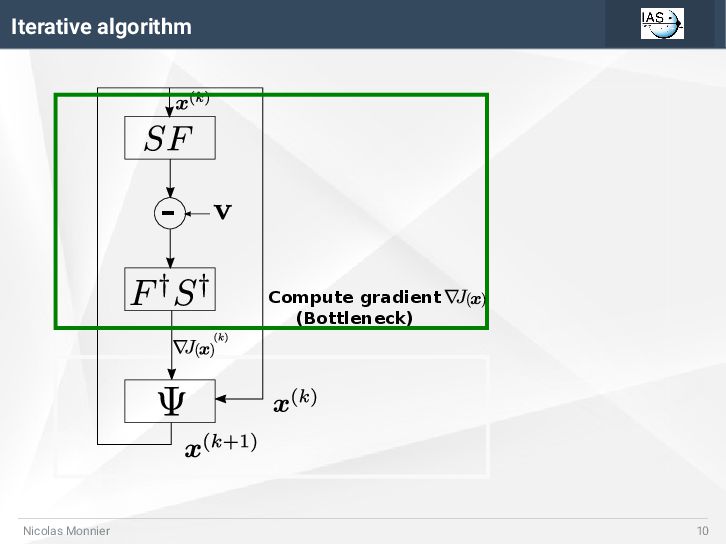
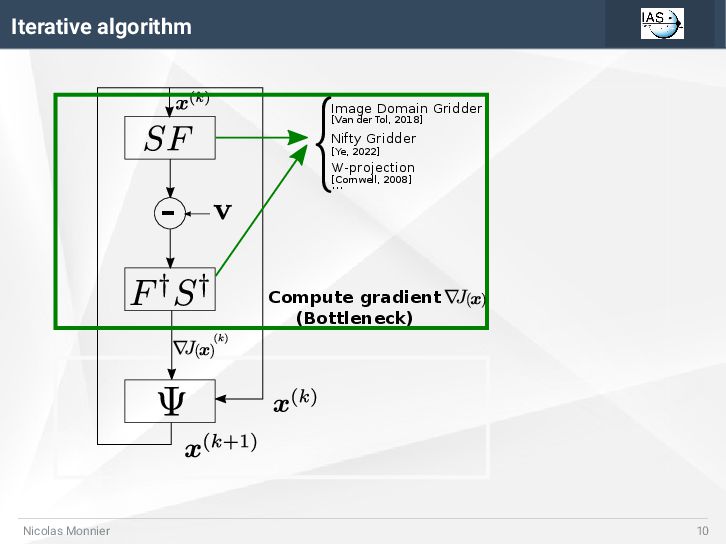
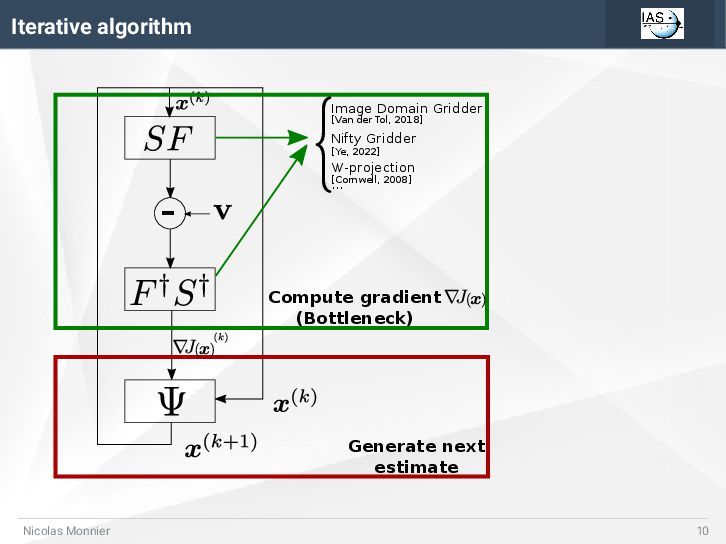
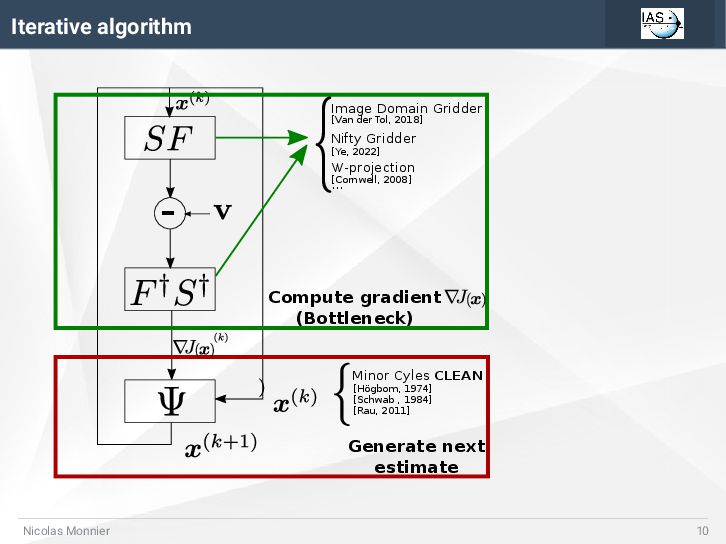
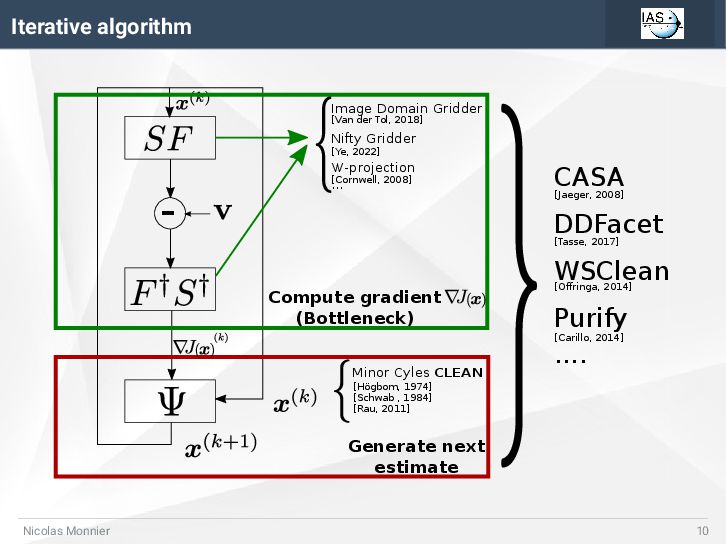
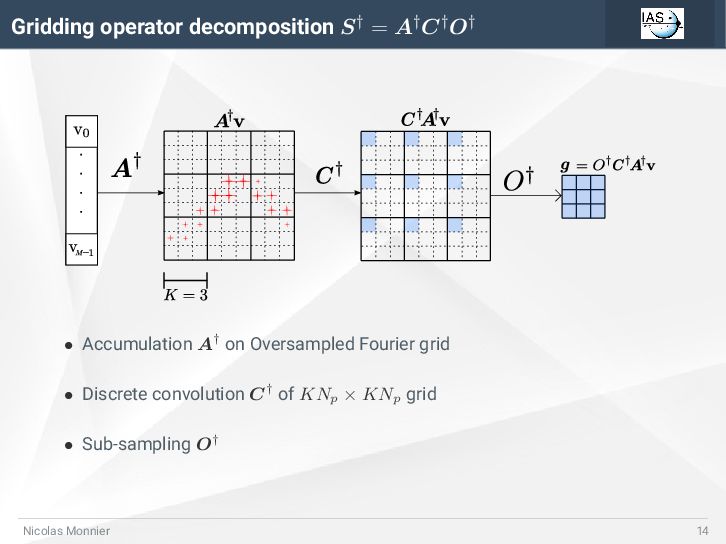
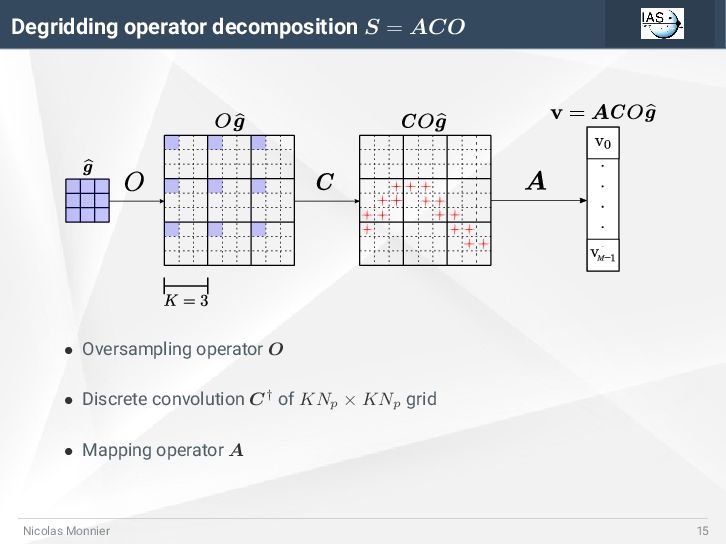
v = SF x + n • Ill-posed inverse problem : infinity of solutions • Solution defines as minimizing a mix-criterion : well-posed problem x = arg min x ∥v − SF x∥2 2 + αR(x) • Iterative algorithms involve computation of the data fidelity gradient ∇J(x) = F †S†(v − SF x) Nicolas Monnier 9
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Grid to Grid method (G2G) [Monnier et al., 2022] Fusion](https://files.speakerdeck.com/presentations/8c8d896552534a6591b5f29b8b490f44/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}