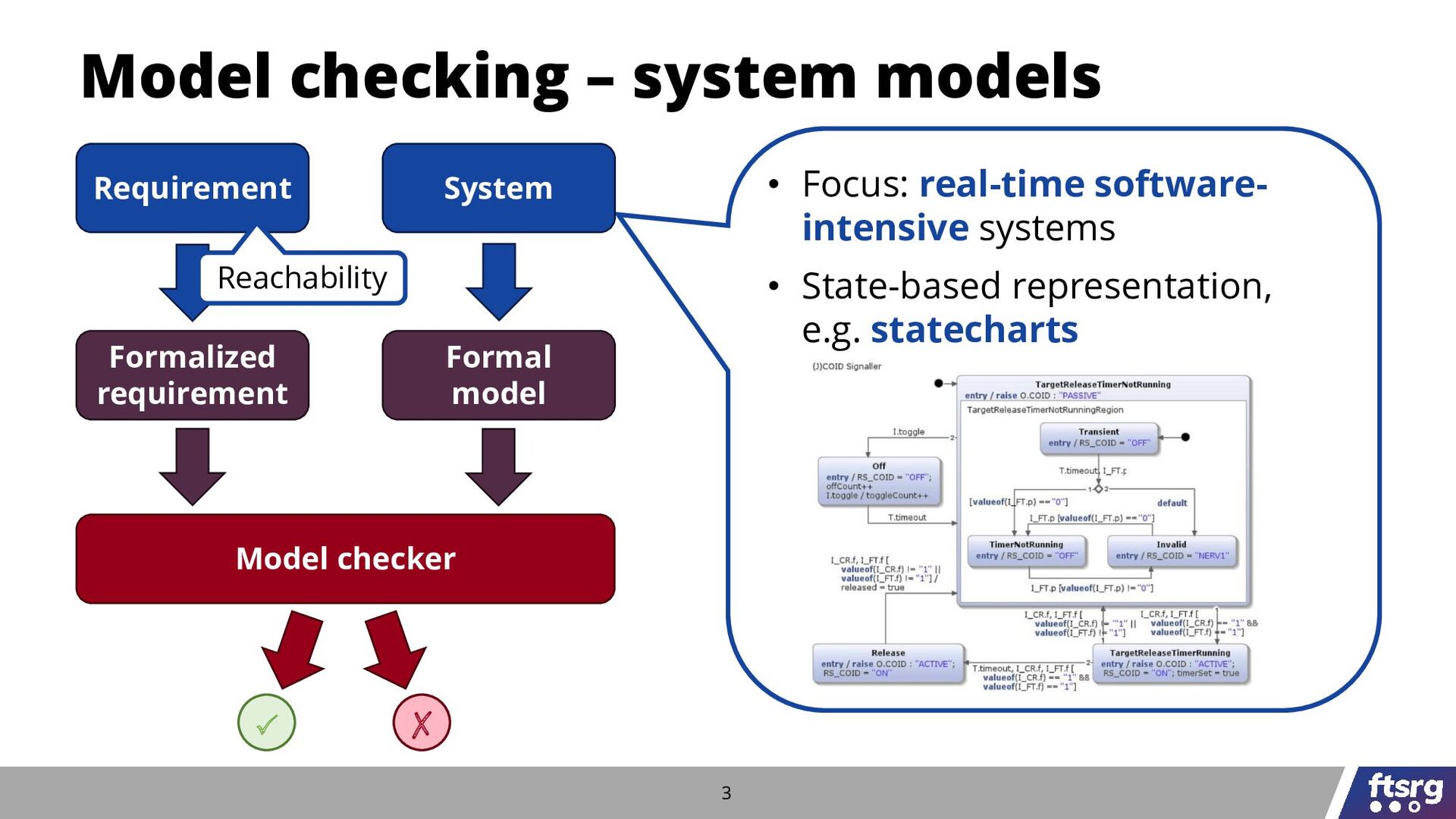
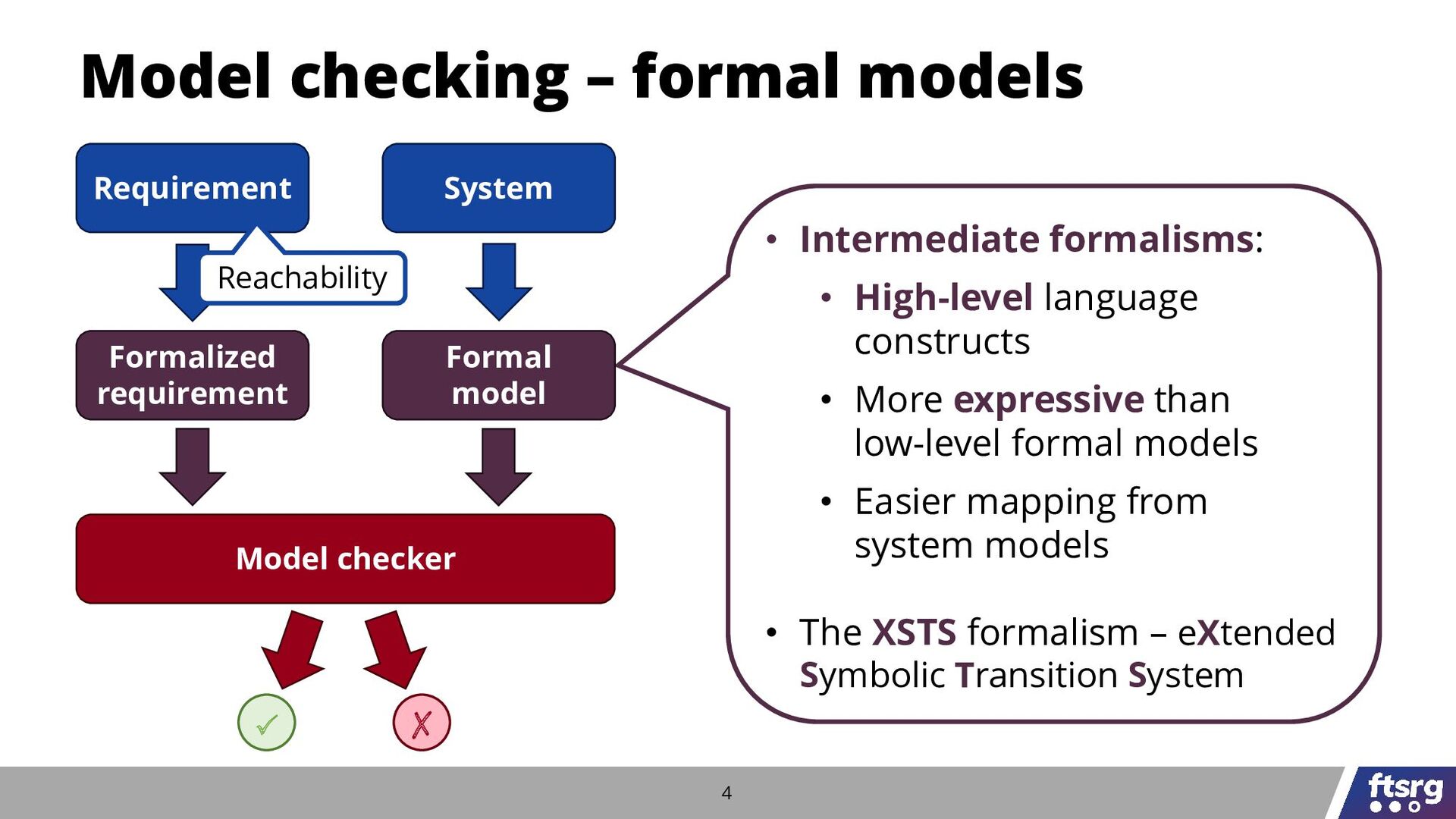
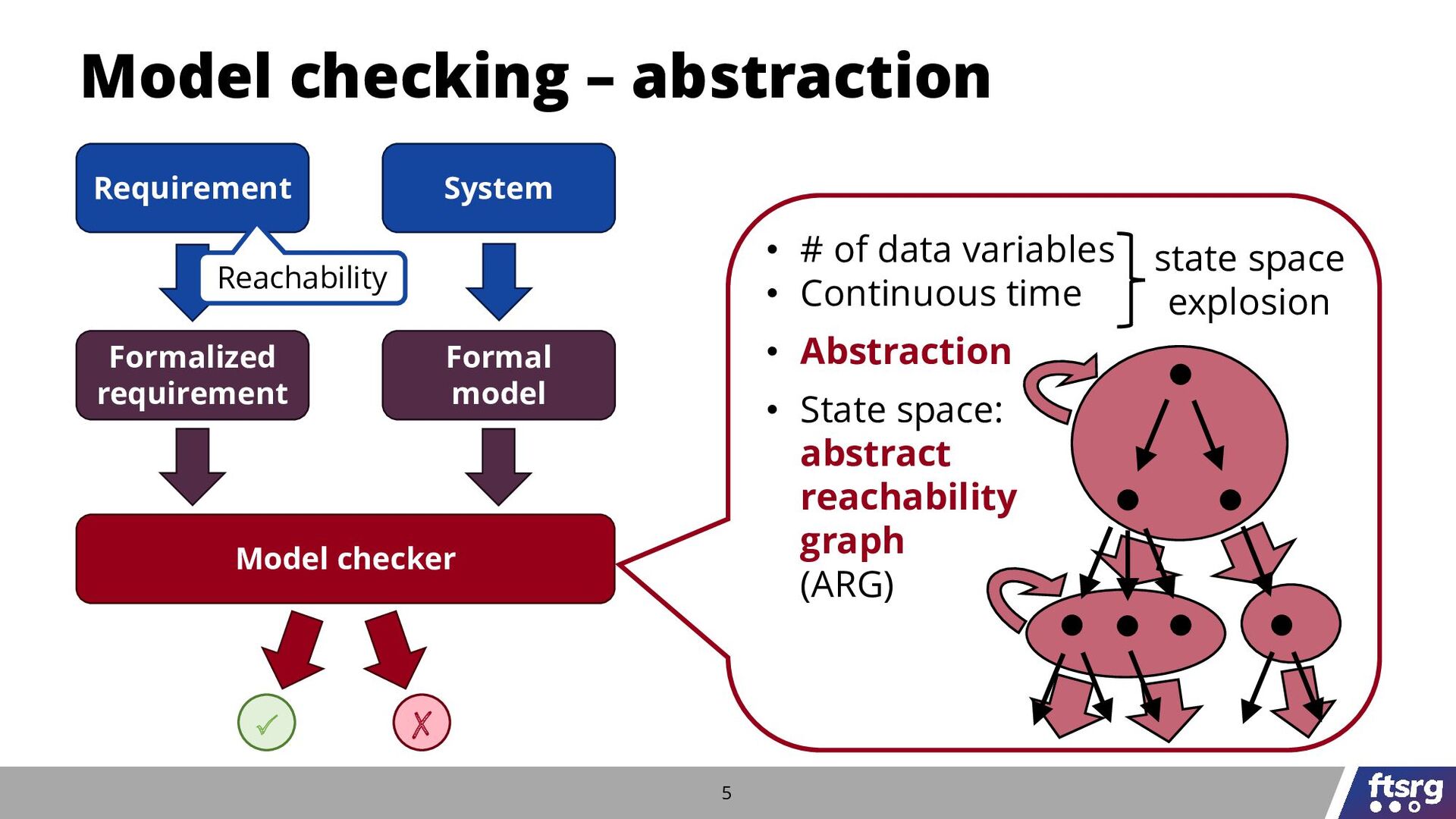
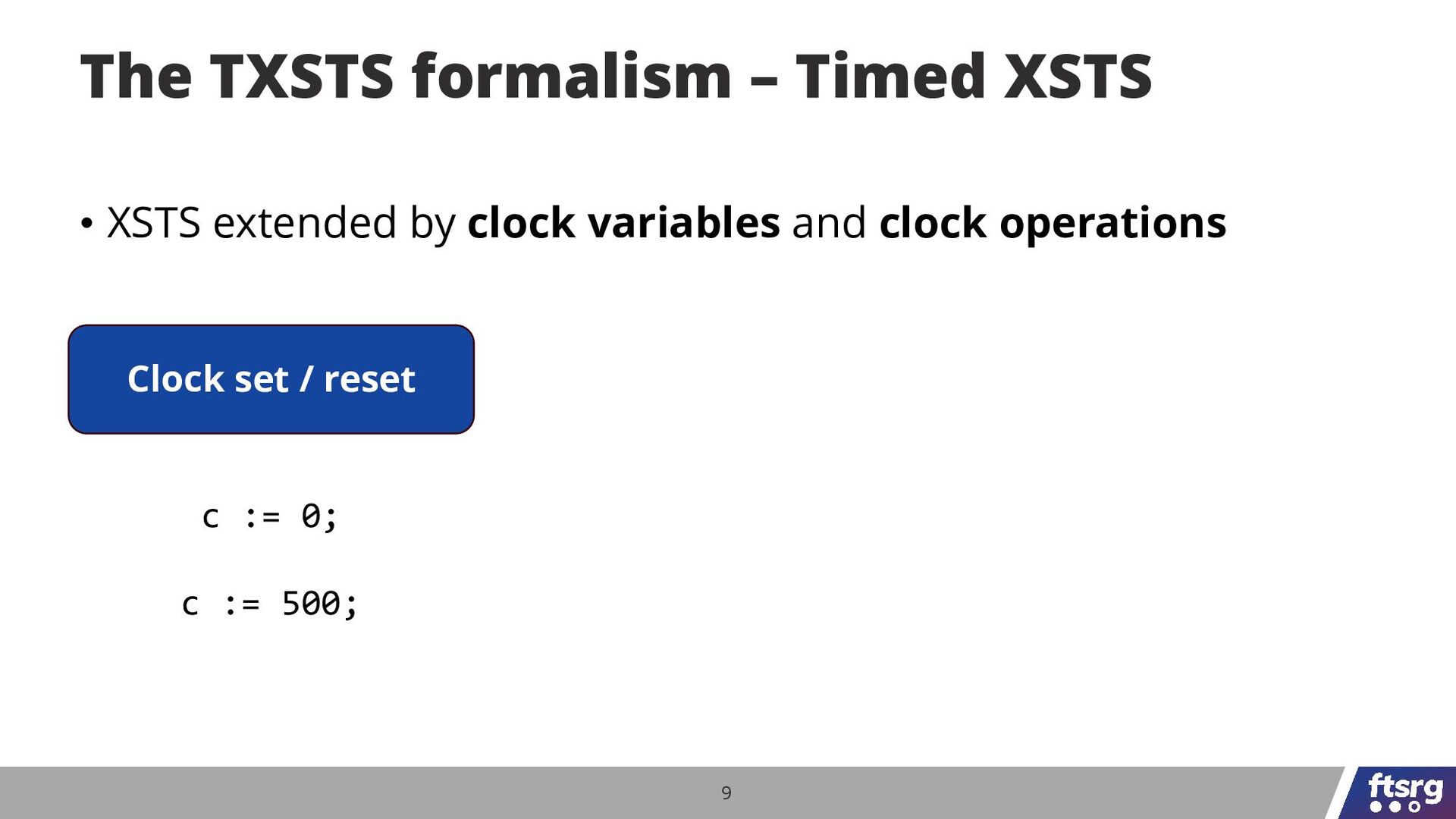
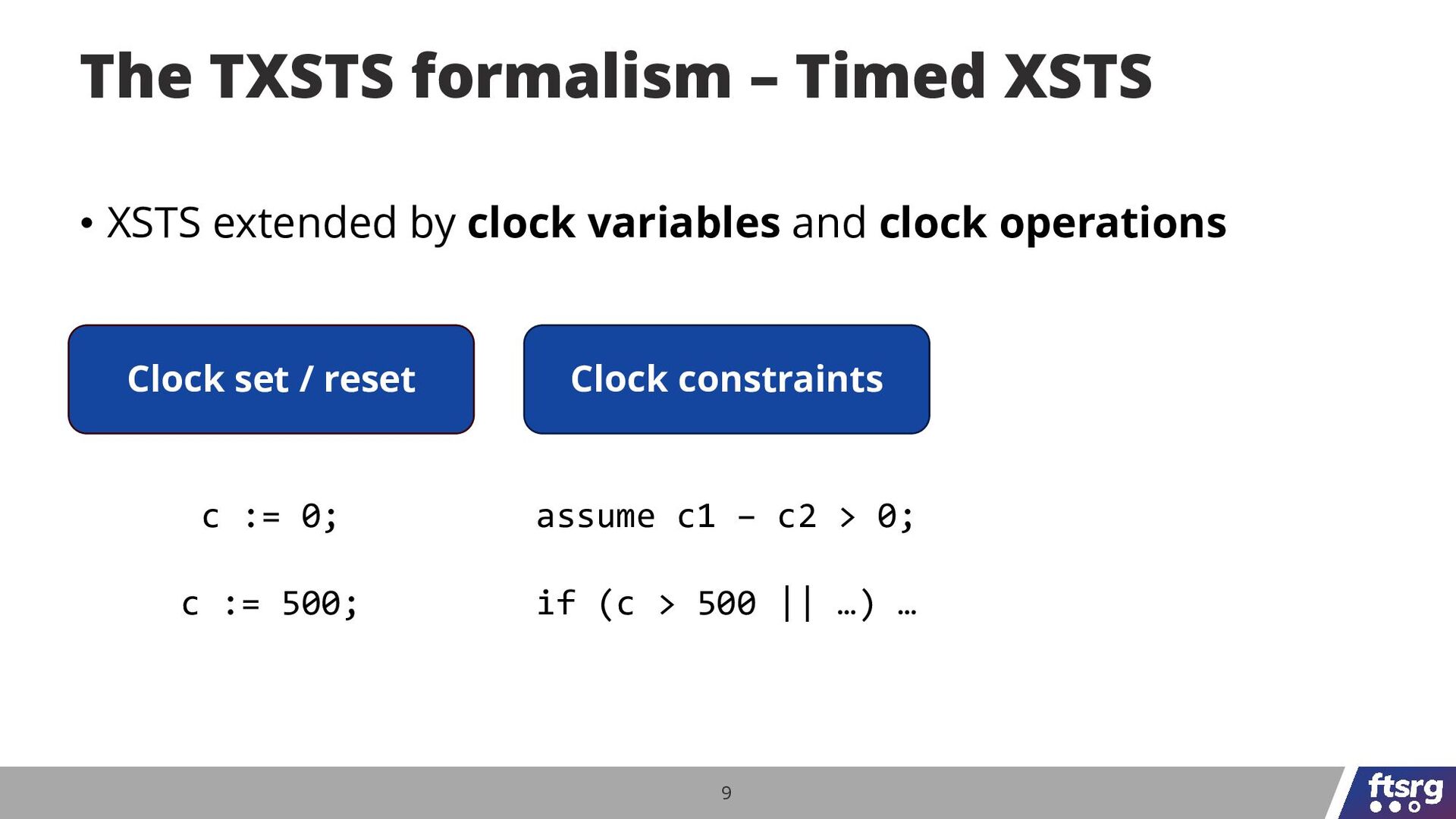
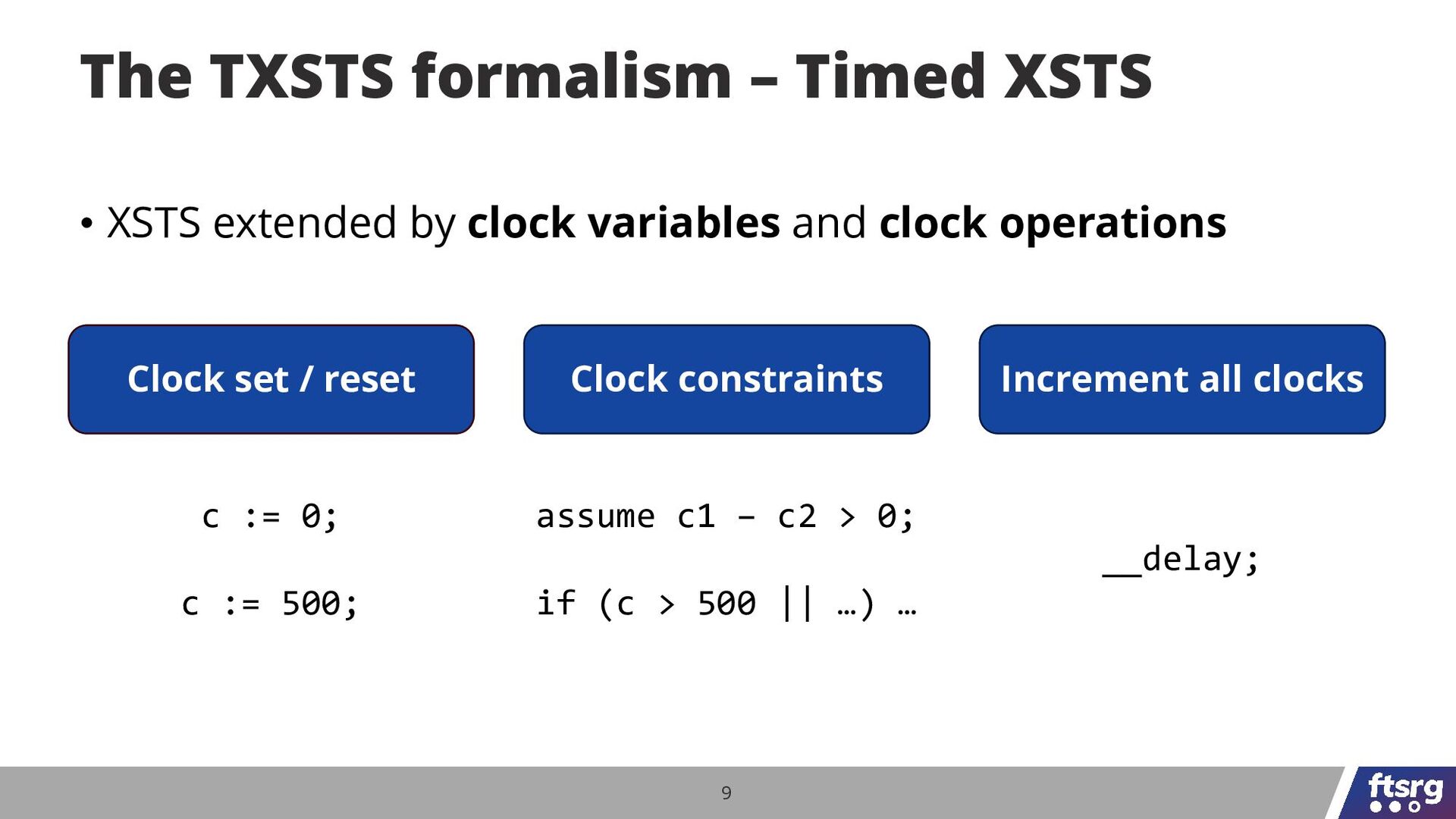
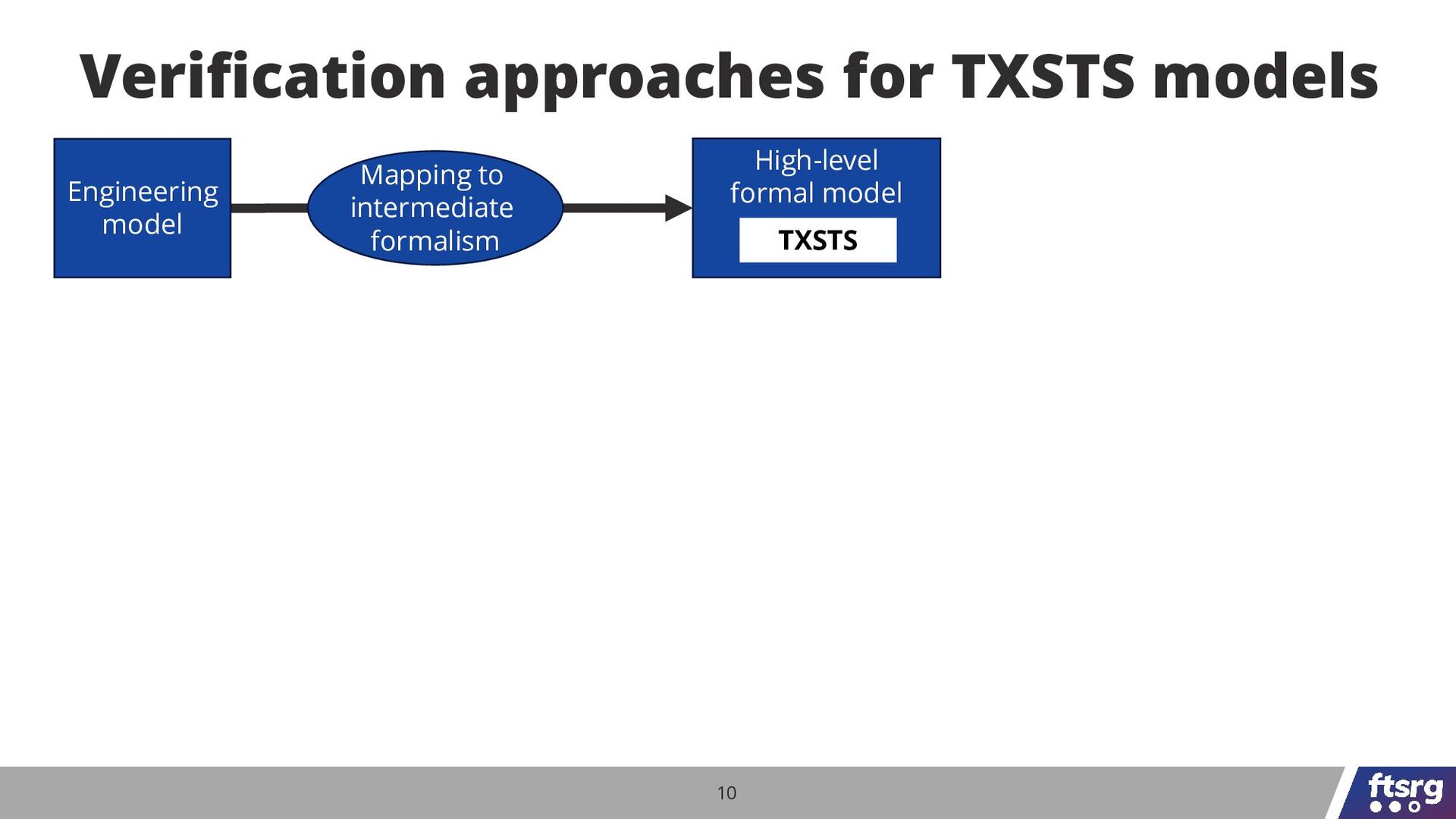
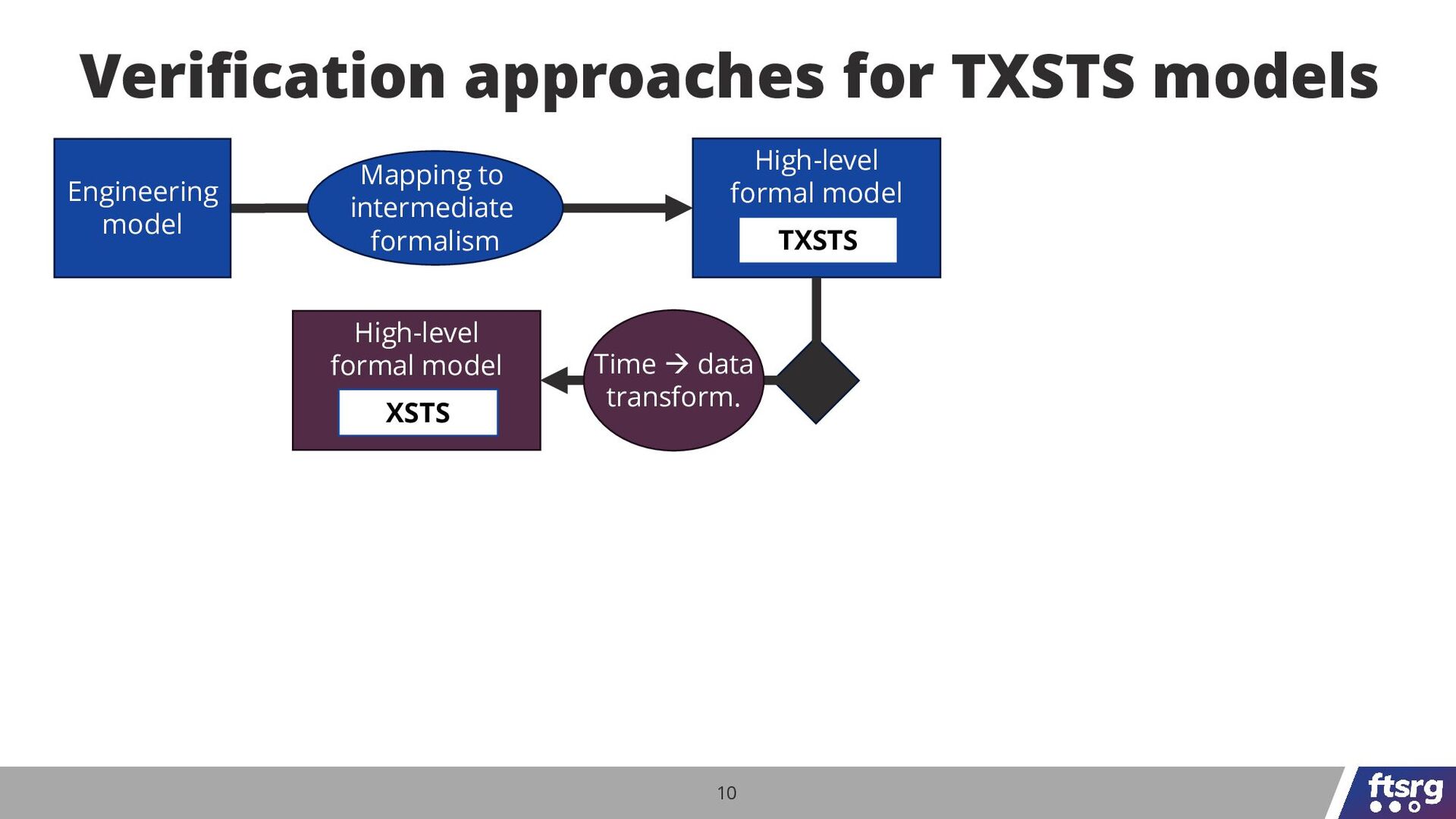
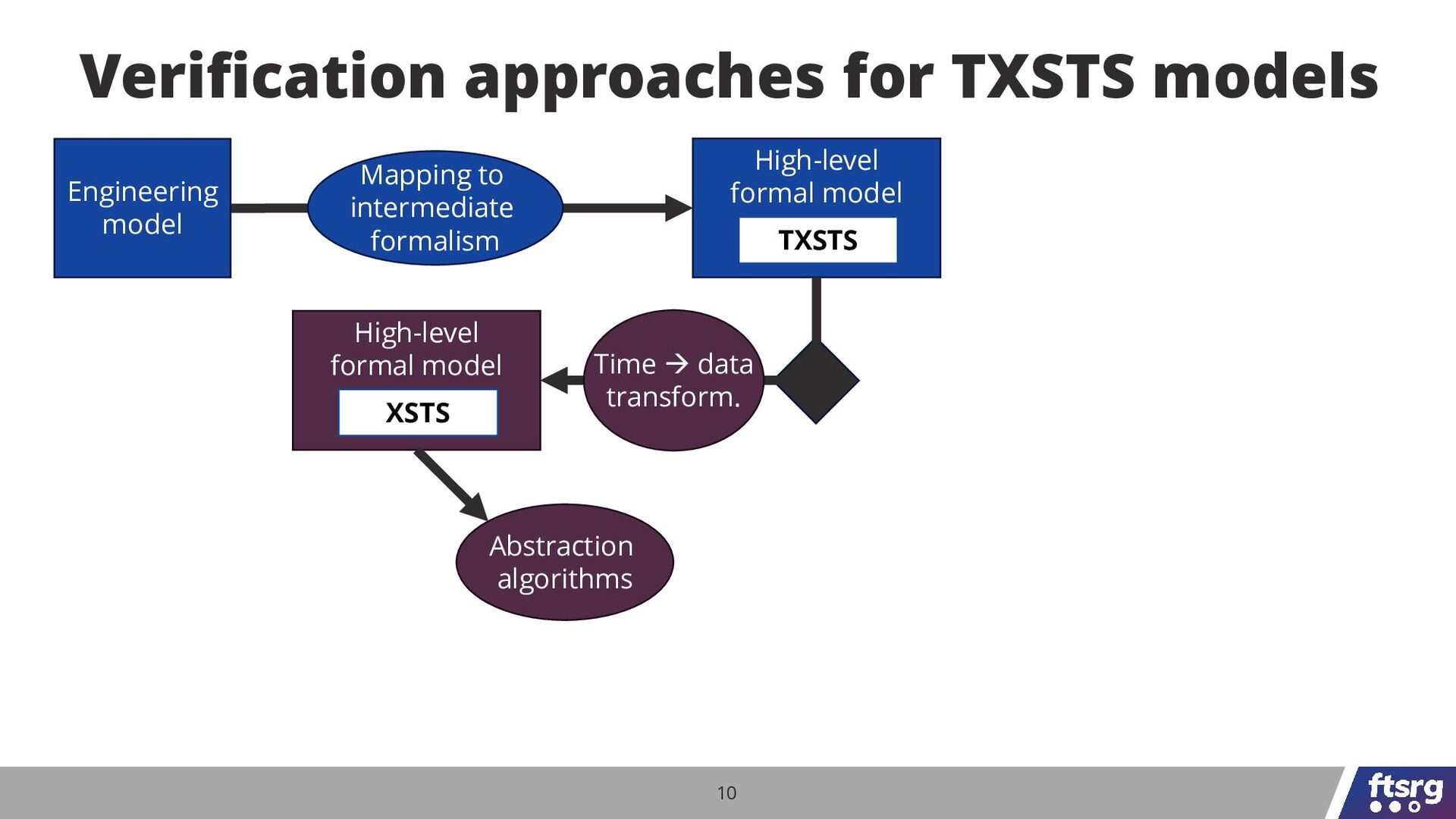
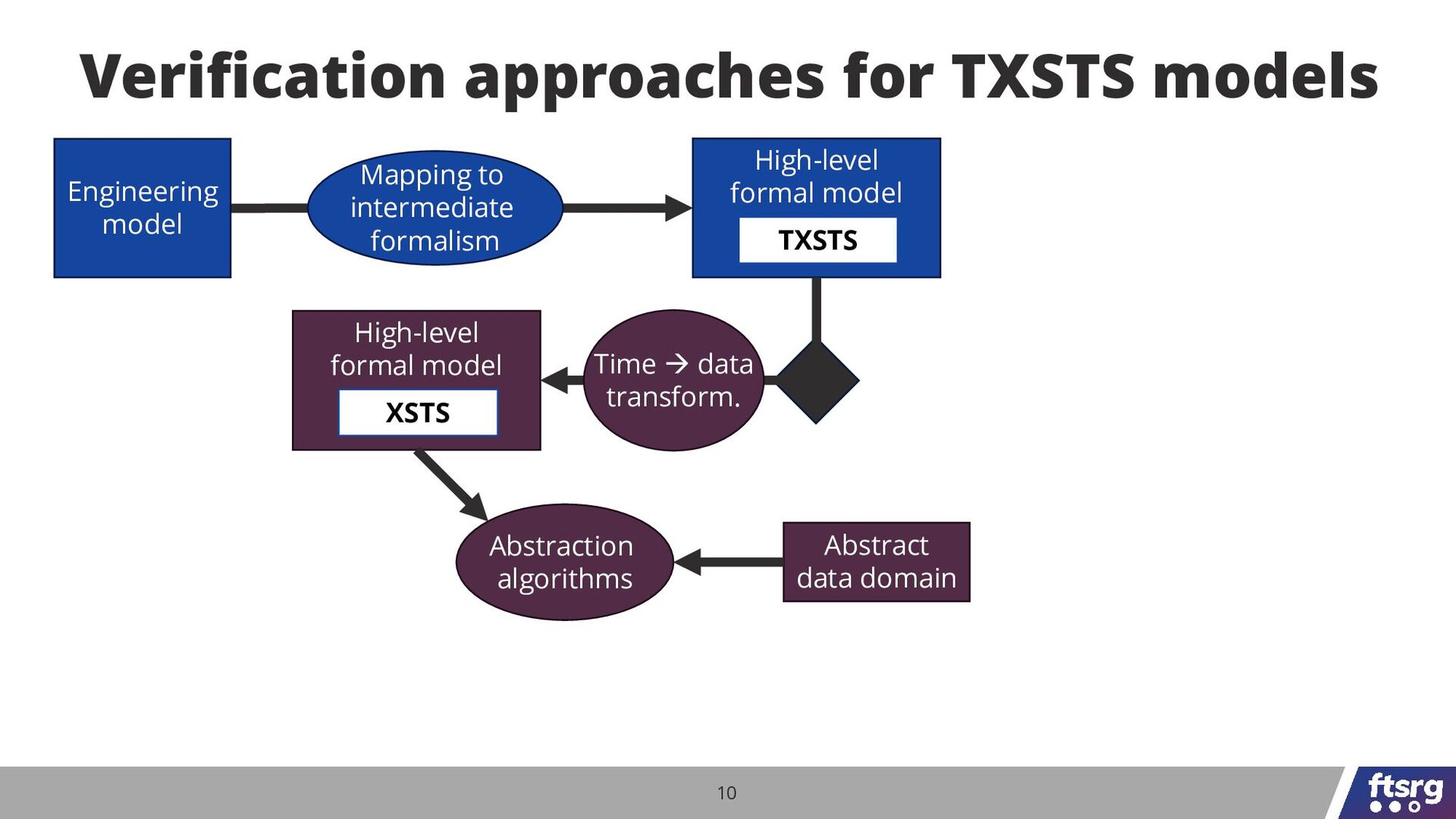
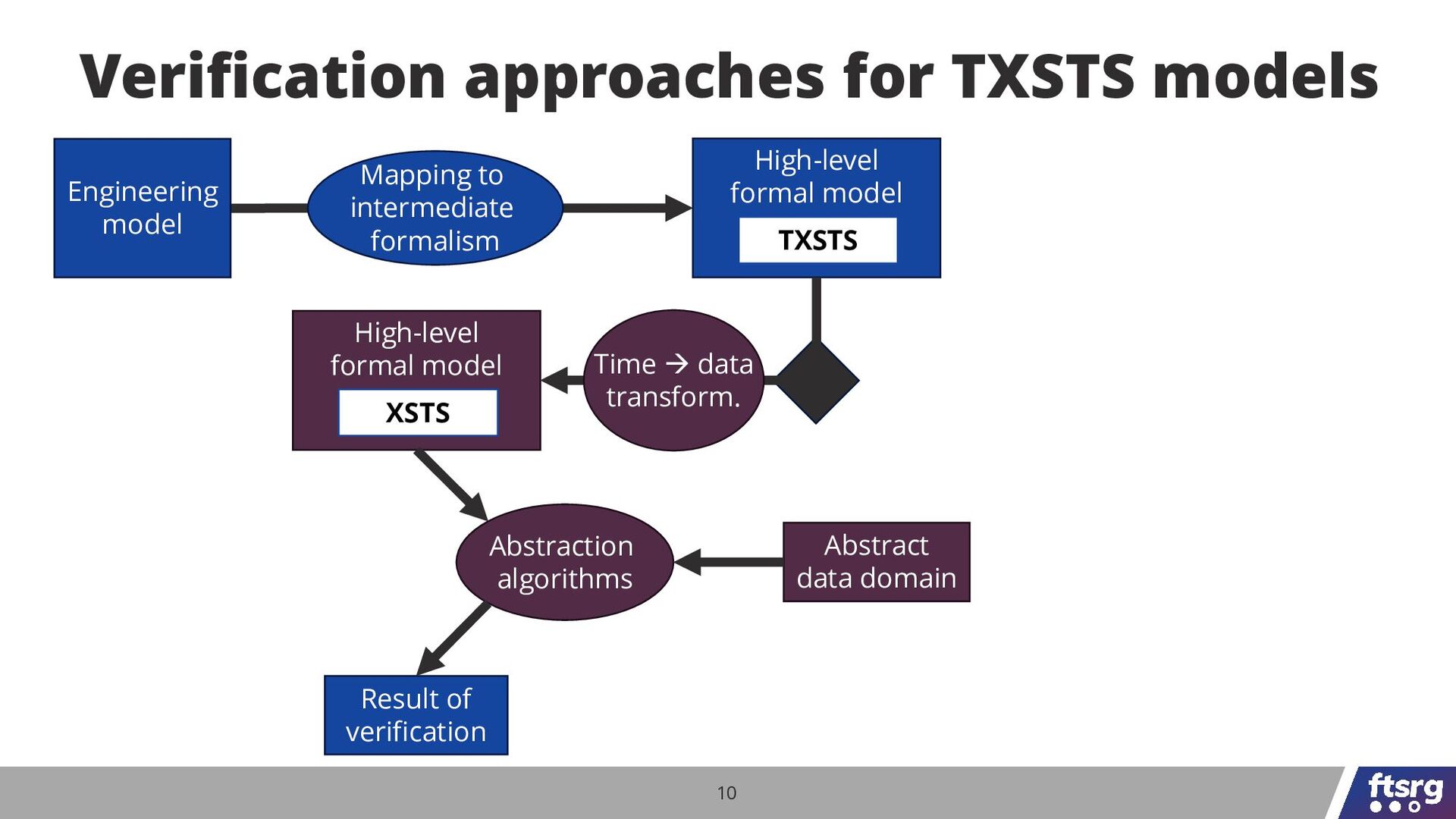
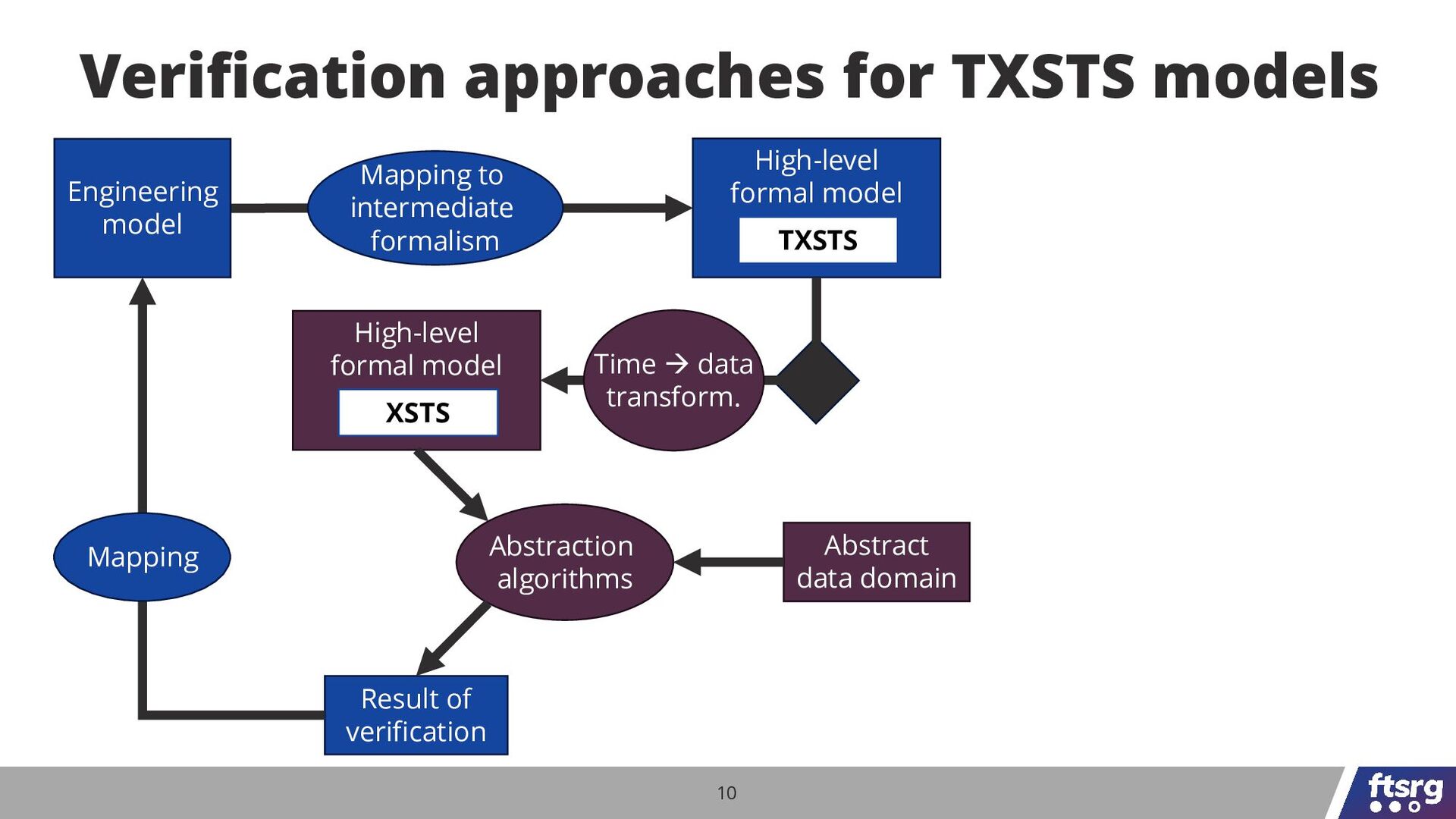
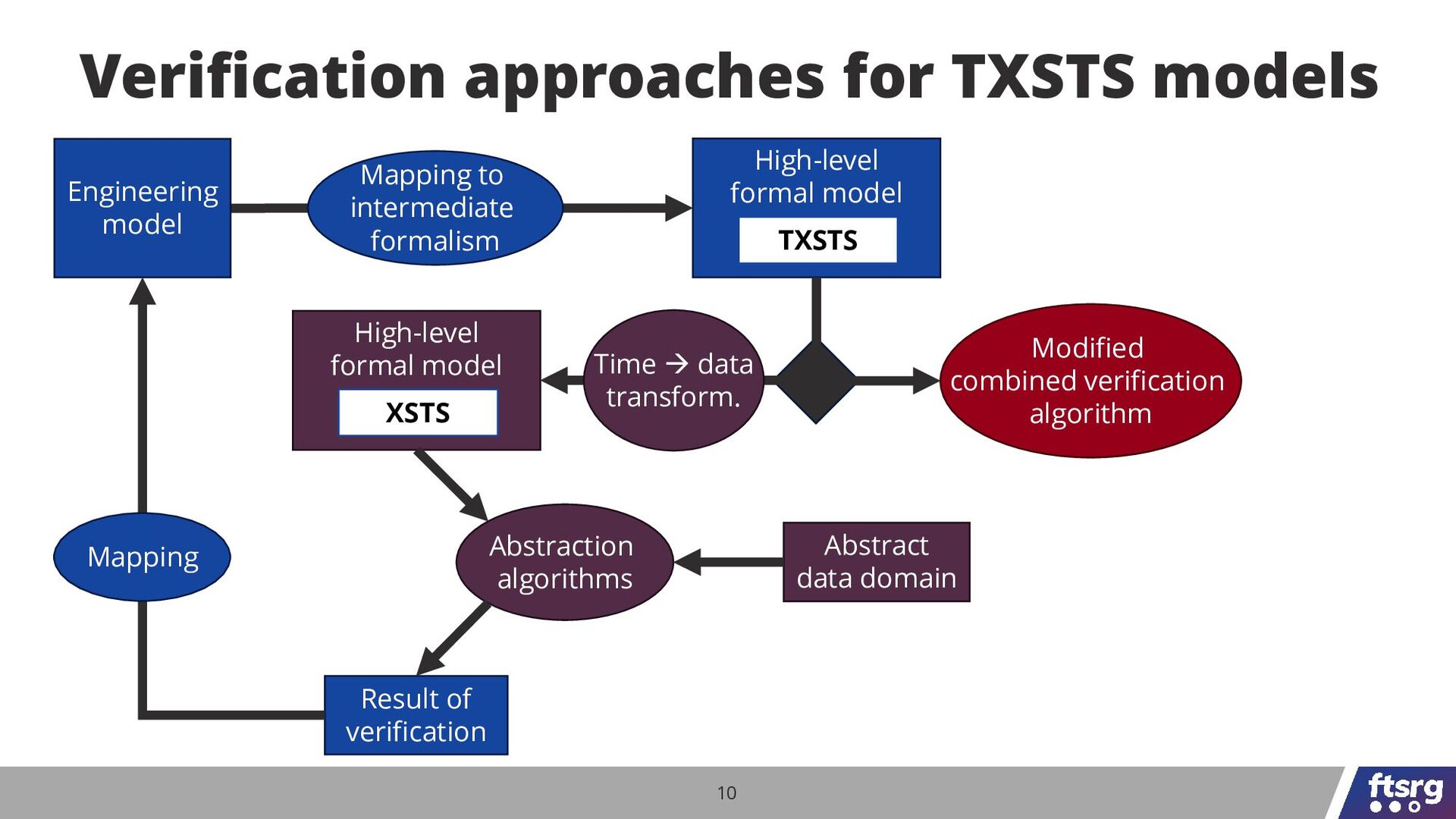
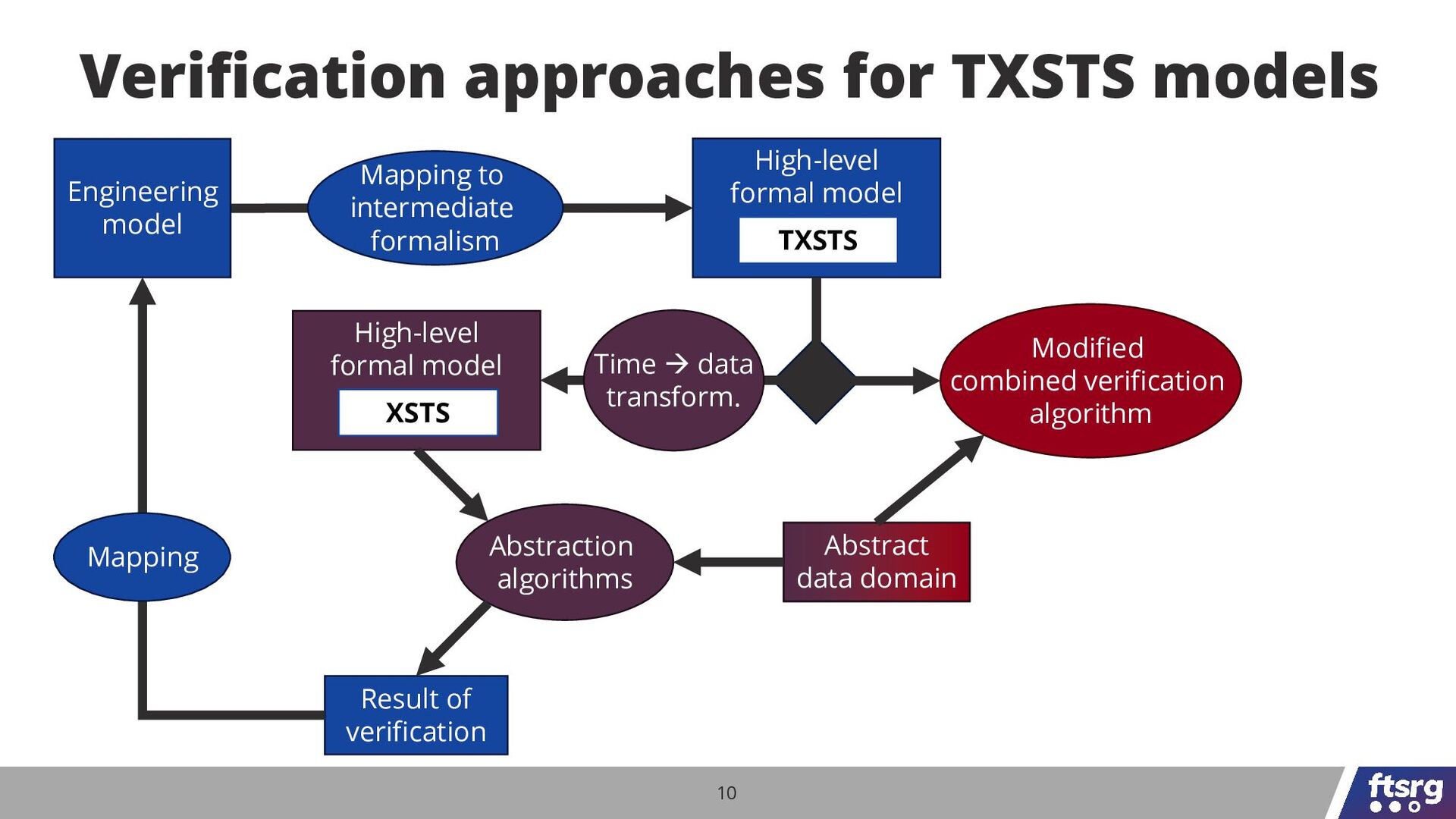
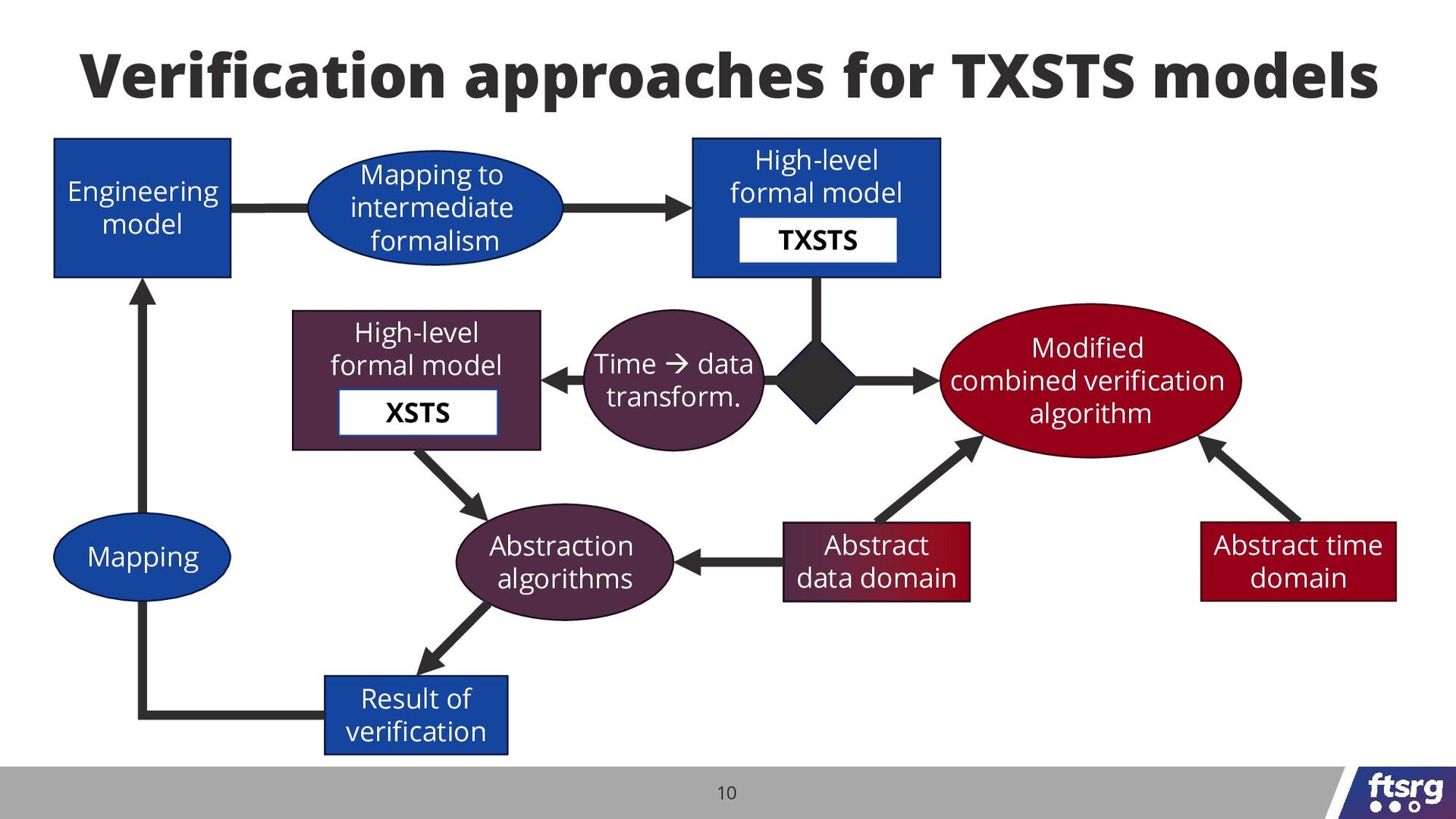
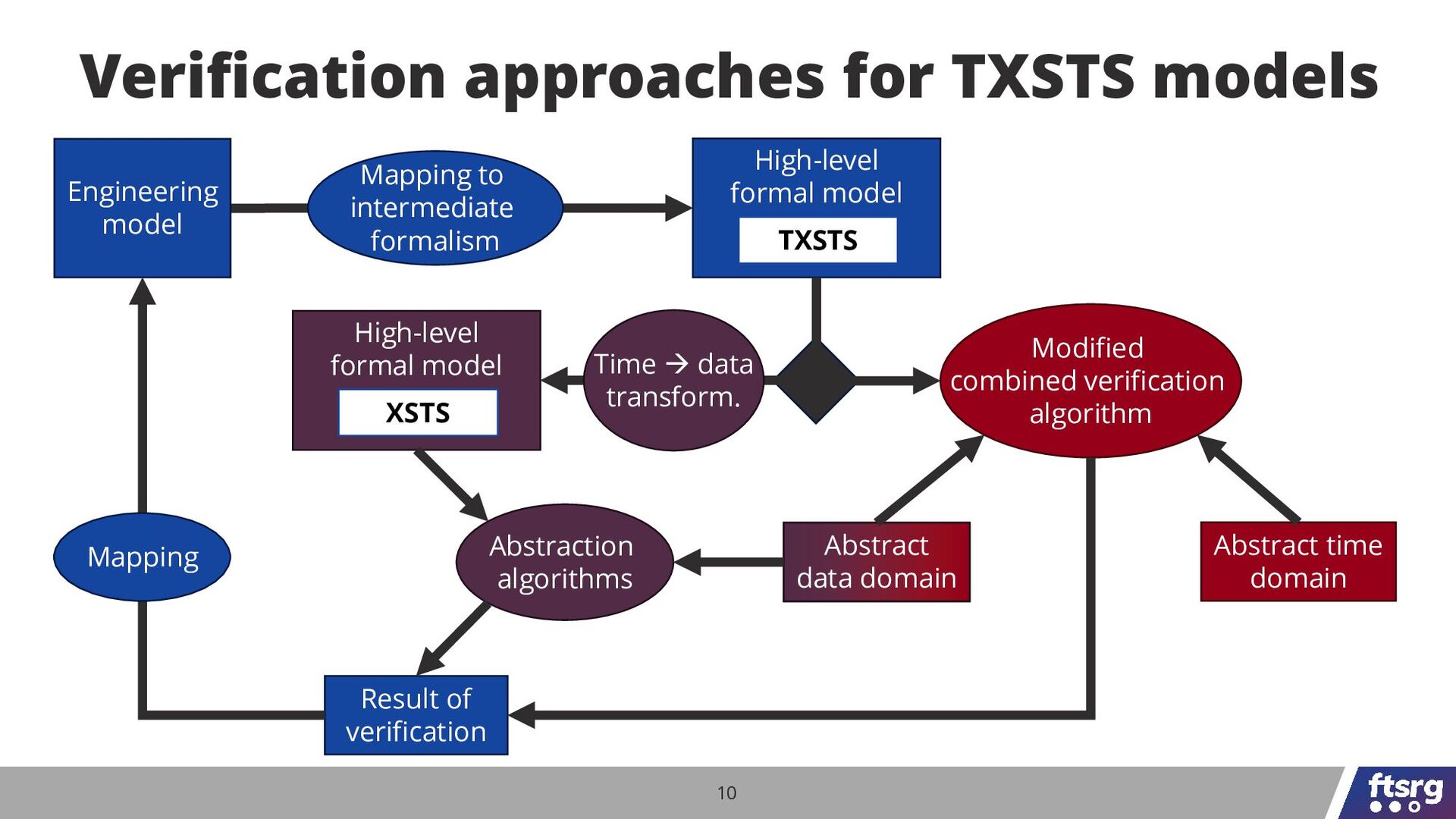
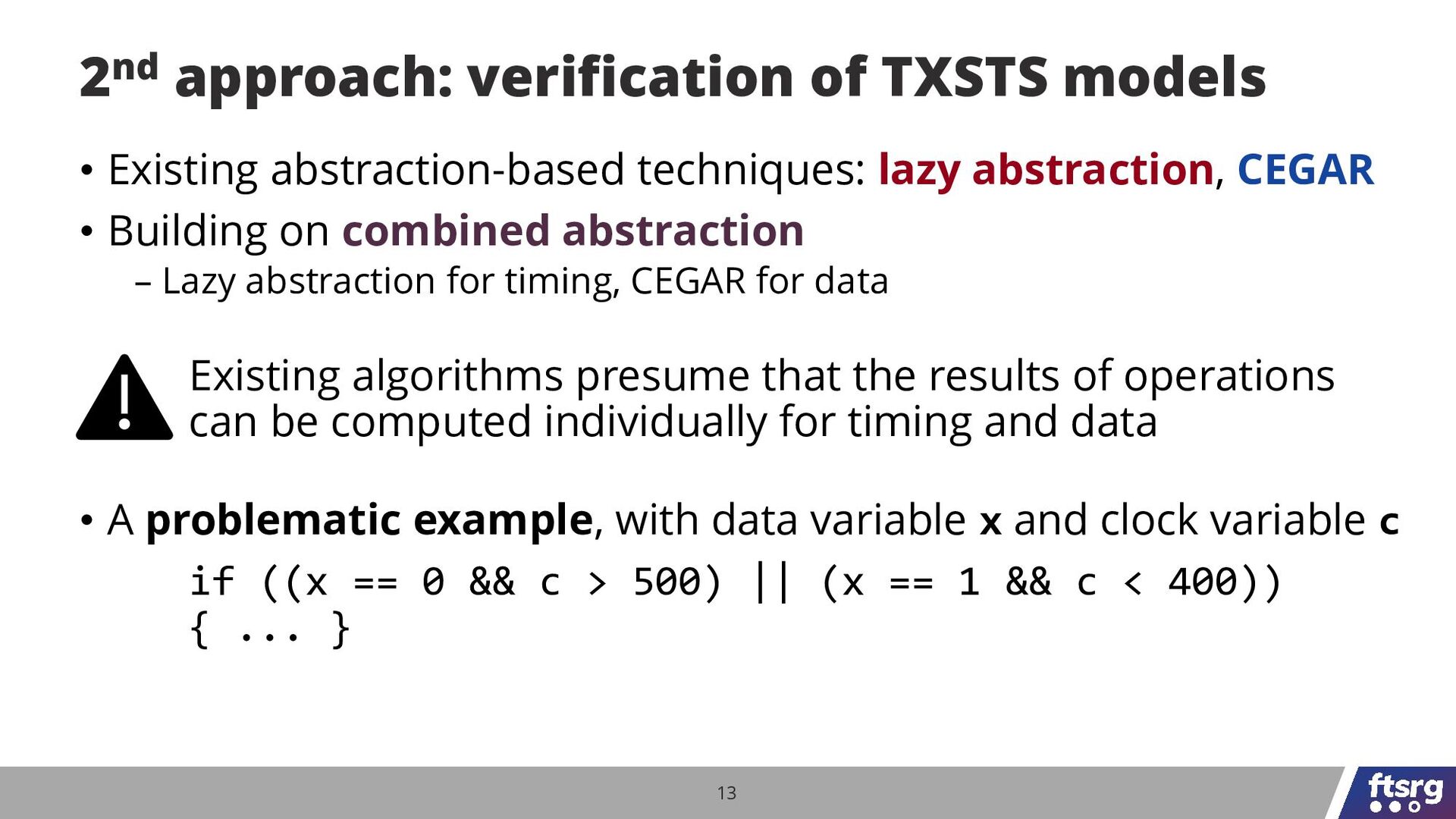
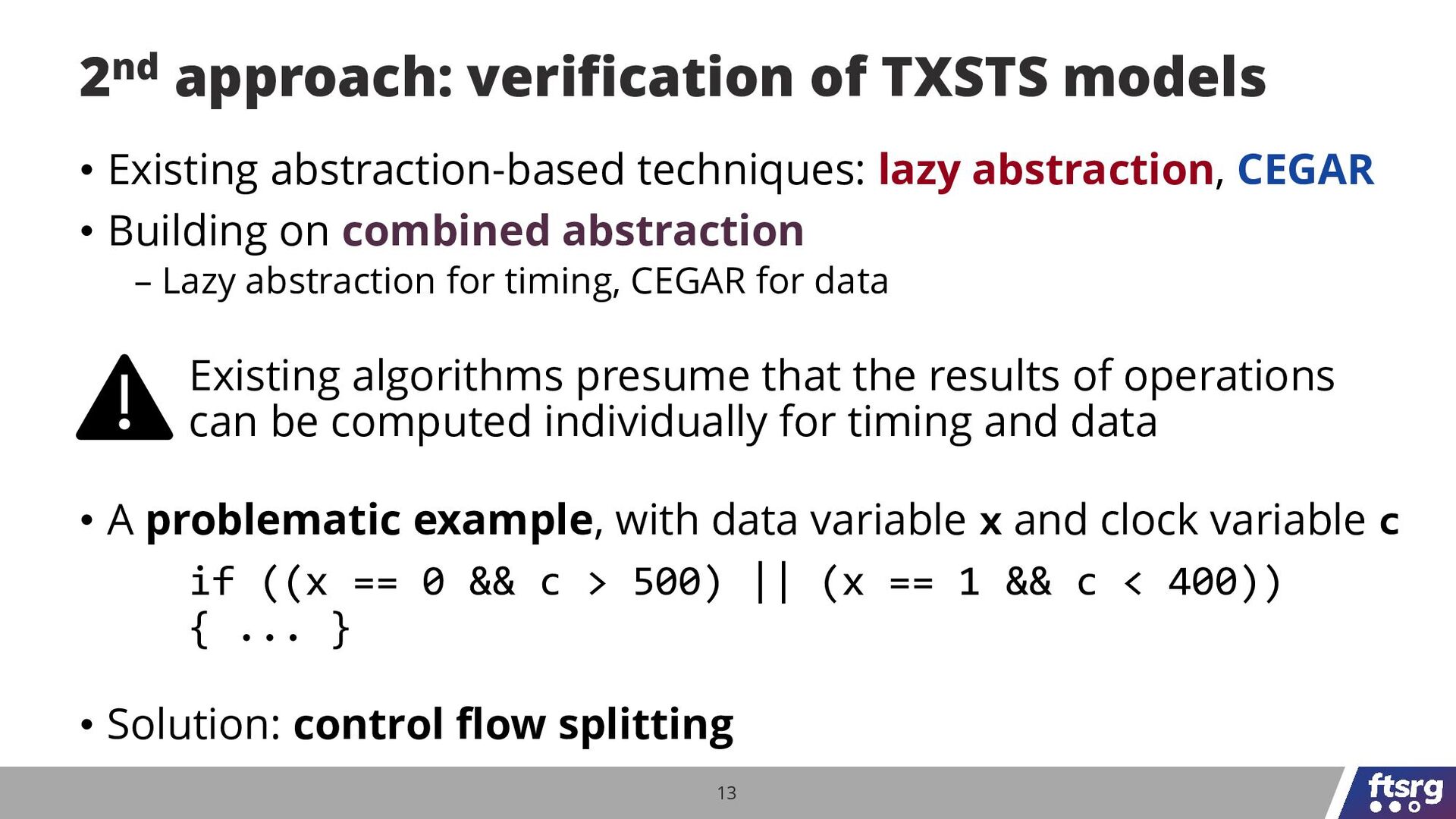
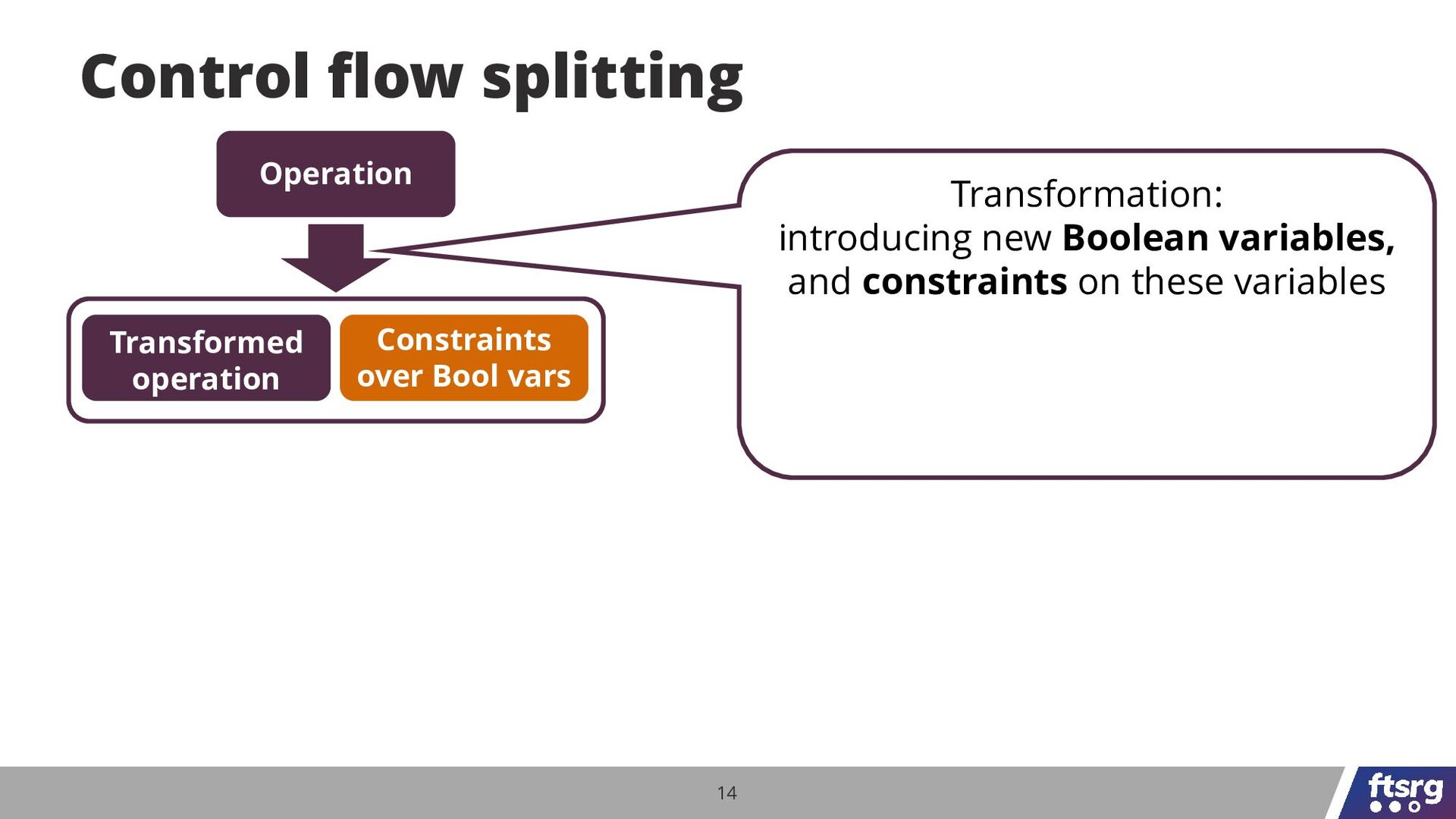
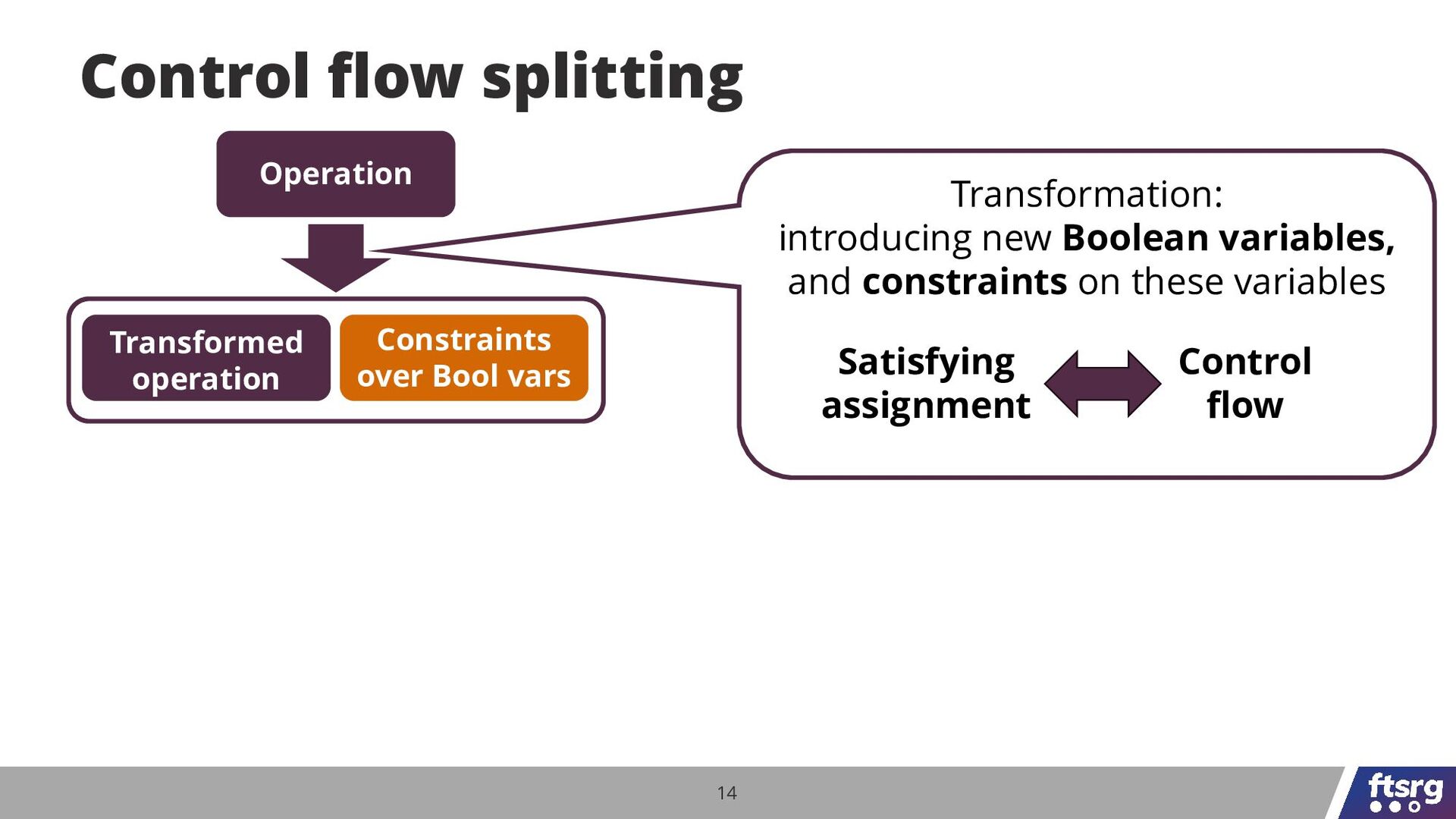
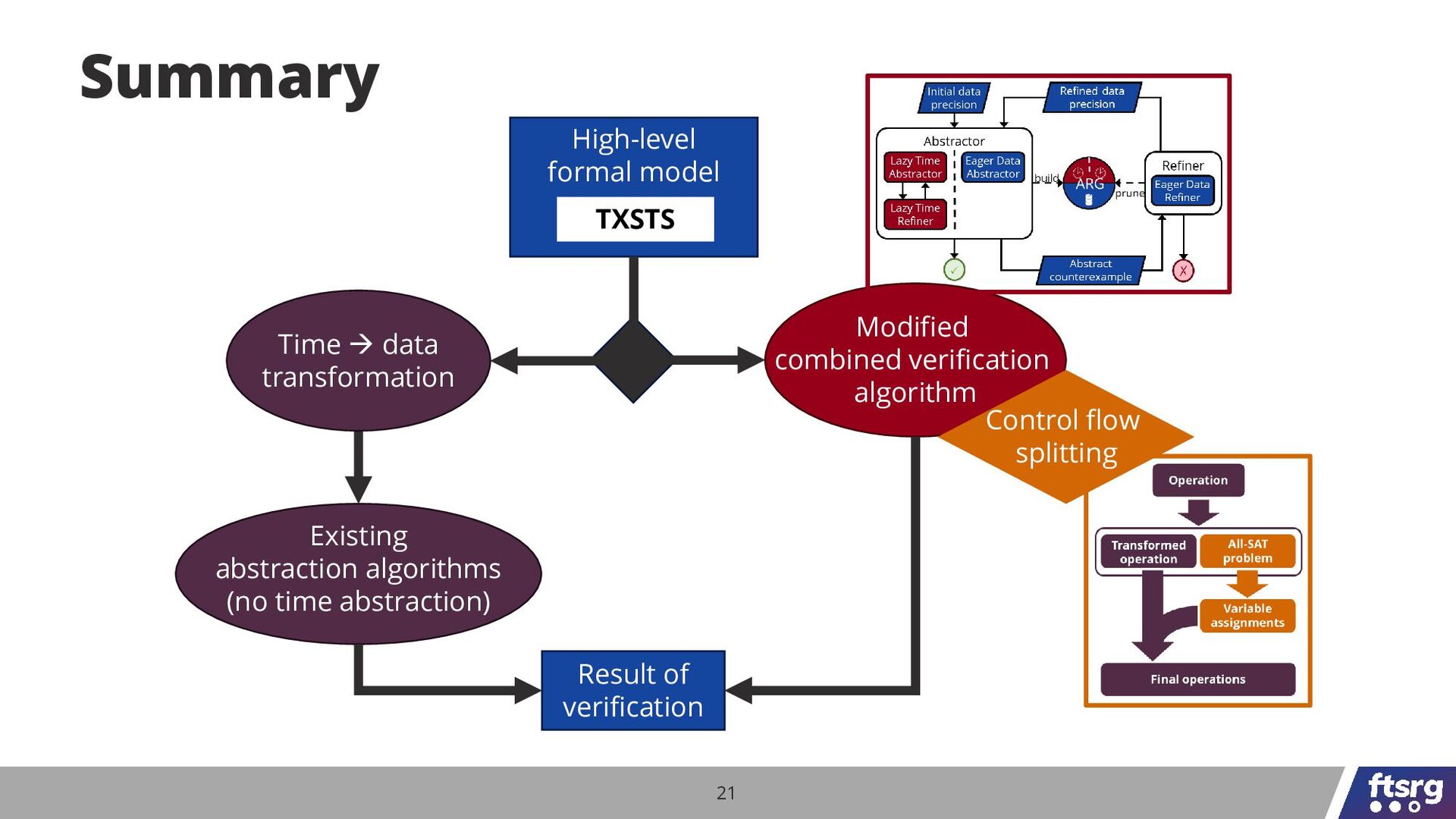
Real-time scheduling requirements, complex timed behavior, computations with external data and heavily data-dependent computations make the verification of real-time software-intensive systems difficult. Complex toolchains, such as statechart-based modeling are often required to adequately express these behaviors. However, existing low-level formalisms for timed model checking lack the expressive power to represent system models from high-level modeling toolchains. Moreover, formal verification is adversely affected by the possible interdependence of data-dependent behavior and scheduling. We propose an intermediate modeling formalism to represent timed systems with complex data-driven behaviors, as well as an adaptation of abstraction-based model checking approaches to enable the verification of these models, handling complex control flows caused by component communication and hierarchical modeling.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}