Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ミニ四駆チキンレース参戦記(敗)
Search
Google Homer
June 21, 2019
Technology
1.2k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ミニ四駆チキンレース参戦記(敗)
Google Homer
June 21, 2019
More Decks by Google Homer
See All by Google Homer
意外とお手軽Donkey AI Car(ありがとうIoTLT)
googlehomer
0
760
ゆるふわマシンラーニング×ゆるメカトロでDonkey AI Car
googlehomer
0
330
私Servoですけど、ぐるぐる回りますが 何か ?!
googlehomer
0
420
The latest information on obniz for all of IoTLT’s
googlehomer
1
340
IoTLT vol.58@SoftBank IoTLT木曜サスペンス劇場
googlehomer
0
810
micro:bitはobnizの夢をみるか?
googlehomer
1
870
Invitation for RPA next stage @UiPathFriendsライトニングトークナイト2019
googlehomer
0
120
M5StickC Block Programming UiFLOW @ ビジュアルプログラミング交流会
googlehomer
1
740
Smart Speaker & IoT @東北TECH道場 八戸道場
googlehomer
0
150
Other Decks in Technology
See All in Technology
Control Planeで育てるBtoB SaaSの認証基盤 - SRE NEXT 2026
pokohide
1
2.3k
LLMやAIエージェントをソフトウェアに組み込むプラクティス
shibuiwilliam
1
360
ボーイスカウトルールでメモリやスキルを改善しよう
azukiazusa1
1
860
美しいコードを書くためにF#を学んでみた話
yud0uhu
1
410
シンガポールで登壇してきます
yama3133
0
120
依頼文化をやめる日 EM視点で語るPlatform EngineeringとInclusive SRE / Discussing Platform Engineering and Inclusive SRE from an EM's Perspective
shin1988
4
5.3k
SRE依存からの脱却 運用を開 発チームへ移す、 フルサイ クル開 発体制の実践
joooee0000
0
2.7k
SREとQA 二人三脚で進めるSLO運用/sre-qa-slo
sugitak
0
470
cccccc
moznion
0
1.9k
インフラと開発の垣根を超えていき!〜元AWSインフラエンジニアがAWS開発で奮闘している話〜
hatahata021
1
170
DatabricksにおけるMCPソリューション
taka_aki
1
240
実装だけじゃない! CCA-F取得エンジニアが教えるClaude Code開発プロセス活用術
diggymo
2
660
Featured
See All Featured
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
Applied NLP in the Age of Generative AI
inesmontani
PRO
4
2.4k
Helping Users Find Their Own Way: Creating Modern Search Experiences
danielanewman
31
3.2k
The Curious Case for Waylosing
cassininazir
1
430
4 Signs Your Business is Dying
shpigford
187
22k
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Beyond borders and beyond the search box: How to win the global "messy middle" with AI-driven SEO
davidcarrasco
3
180
A Guide to Academic Writing Using Generative AI - A Workshop
ks91
PRO
1
350
Organizational Design Perspectives: An Ontology of Organizational Design Elements
kimpetersen
PRO
1
760
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
SEO for Brand Visibility & Recognition
aleyda
0
4.6k
Sharpening the Axe: The Primacy of Toolmaking
bcantrill
46
2.9k
Transcript
Google Homer IoT LT vol.52@ 2019年6月21日 チキン野郎 ミニ四駆チキンレース 参戦記 (敗)
こだわったこと ミニ四駆 速く、カッコよく !
小型化 : obniz 大貢献 距離センサー、DC Motor直挿し
いざ 爆走
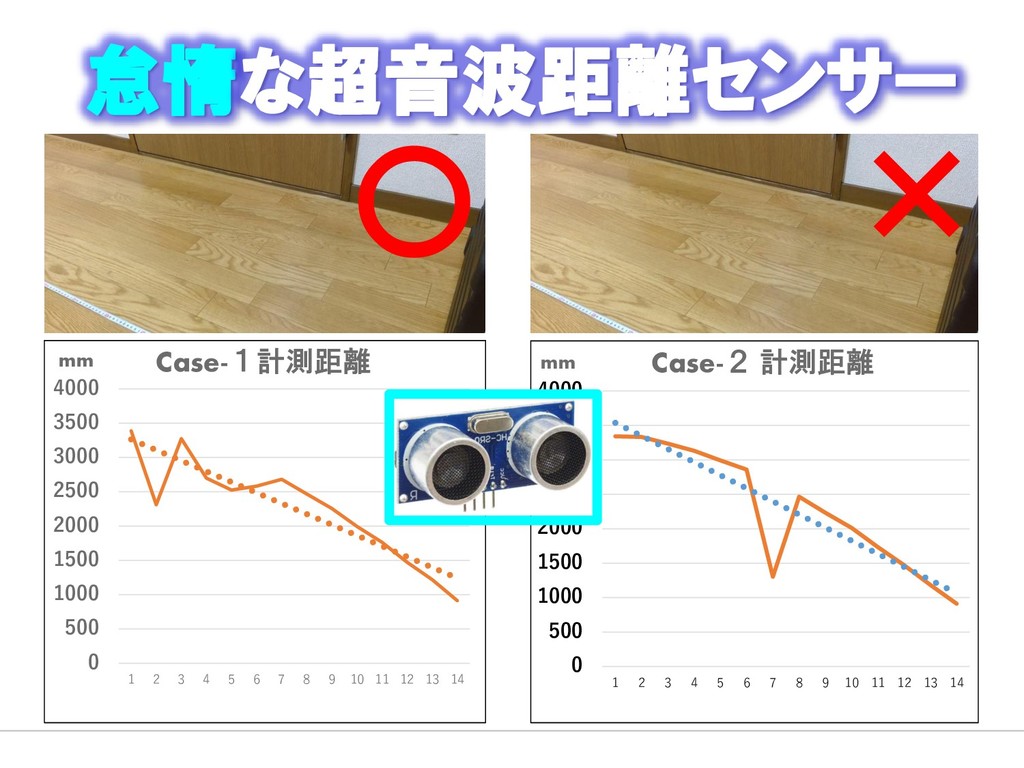
0 500 1000 1500 2000 2500 3000 3500 4000 1
2 3 4 5 6 7 8 9 10 11 12 13 14 mm Case-1計測距離 〇 怠惰な超音波距離センサー 0 500 1000 1500 2000 2500 3000 3500 4000 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Case-2 計測距離 mm ×
キャリブレで悪化って? ナメてる !
150 200 250 1 2 3 4 5 6 7
8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 超音波距離センサー遅っ ! 210ms / 回 by using obniz SDK
・ 走行速度 : 5000 mm / 2000 mm = 2.5mm
/ ms ・ 計測速度 : 210 ms / 回 ・ キャリブレ中の移動距離 2.5 mm / ms × 210 ms / 回 × 3 回 = 1574 mm キャリブレ中に1.5mも前進
フィードバック 制御不可 作戦変更へ
ダッシュタイマー + 接近センサー 短距離なので高速な赤外線センサーに変更 ( 30ms/回 1m~10cm )
追い込 み開始
フローリング カーペット 床の種類で全然走りが違う
自宅にORACLE Officeを再現
90g 増 (単四×4本) で速度20%低下 1100mm/500ms = 2.2mm/ms 1400mm/500ms = 2.8mm/ms
DC Motor ネイティブ obniz&Li-Po 軽量化に大貢献 Li-Po 7.4V 400mAh DDC 5V
逆回転のブレーキで90cm 短縮 電源OFF 420 cm 逆回転 330 cm (参考) ショートブレーキは
あまり効果なかった。
190cm スリックタイヤでブレーキ20cm 短縮 スリック ローハイト バレル 200cm 210cm
正確なWaitで正確な接近 0 50 100 150 200 1 2 3 4
5 6 7 8 9 0 50 100 150 200 1 2 3 4 5 6 7 8 9 mm mm 回目 回目 30msWait時間/回 30msWait時間/回 〇 ×
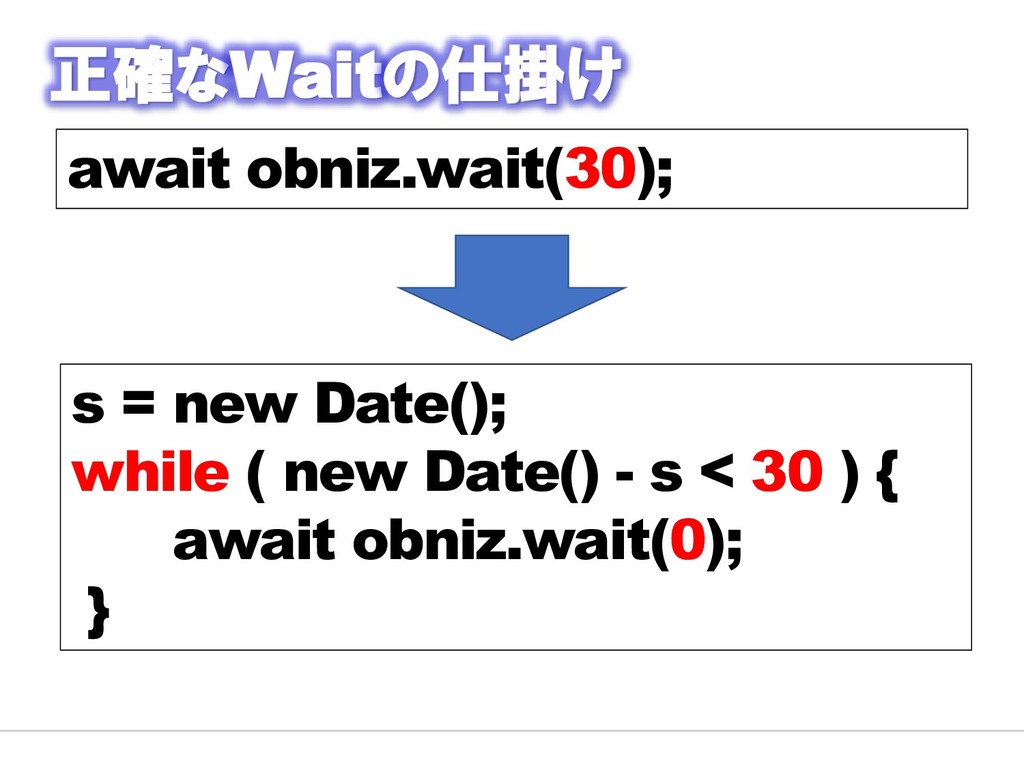
s = new Date(); while ( new Date() - s
< 30 ) { await obniz.wait(0); } await obniz.wait(30); 正確なWaitの仕掛け
RPAで試験統計分析自動化 RPAツール:UiPath
0 200 400 600 1 2 3 4 5 6
7 8 9 10 0 5 10 15 1 2 3 4 5 6 7 8 9 10 46 ~2 cm 1.5 ~ 0 cm ブレーキ停止 壁際停止 試験走行1200回 、最終結果 回目 回目 mm mm
当日のリハーサル結果
決 勝 戦
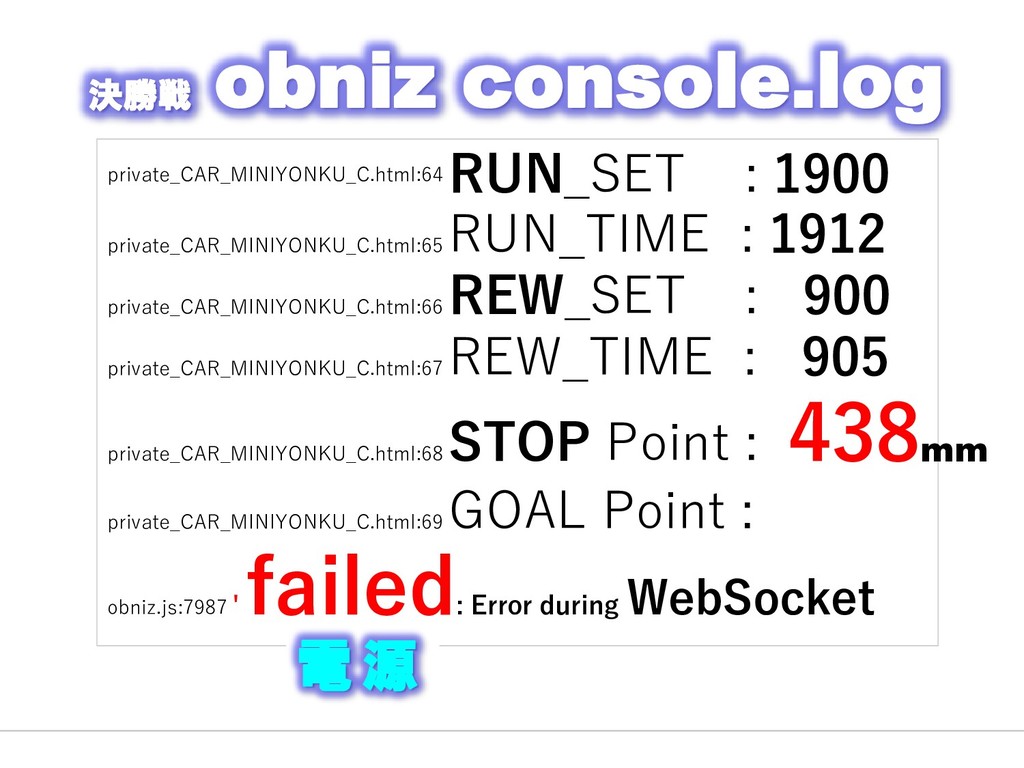
private_CAR_MINIYONKU_C.html:64 RUN_SET : 1900 private_CAR_MINIYONKU_C.html:65 RUN_TIME : 1912 private_CAR_MINIYONKU_C.html:66 REW_SET
: 900 private_CAR_MINIYONKU_C.html:67 REW_TIME : 905 private_CAR_MINIYONKU_C.html:68 STOP Point : 438 private_CAR_MINIYONKU_C.html:69 GOAL Point : obniz.js:7987 ' failed : Error during WebSocket 決勝戦 obniz console.log mm 電 源
obniz IoTハードル下げまくり !! 企画 谷本さん 楽しかったぁ~、ありがとう。次回も、超楽しみ! 優勝 稲玉さん ( 四日市のミニ四駆芸人
) 車輪にエンコーダー埋め込むとは 反則 神かよ! 感服! = = ま と め = =
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}