flight schedules occur. Causes: meteorological conditions congestion at the airport (also poor gate assignment schedule) late or absent crew members hiccups in boarding of passengers or in loading of cargo sudden war / terrorist threat
of the previous research: local improvements of flight scheduling minimization of total passenger delay (nonlinear integer problem, difficult to solve for large instances) development of greedy heuristics (minimizing first the number of cancelled flights, then the overall passenger delay) time-space framework and successive shortest path to cancel a series of flights (no indication on when we can resume normal operations, only feasible solution for shortage of more than one aircraft)
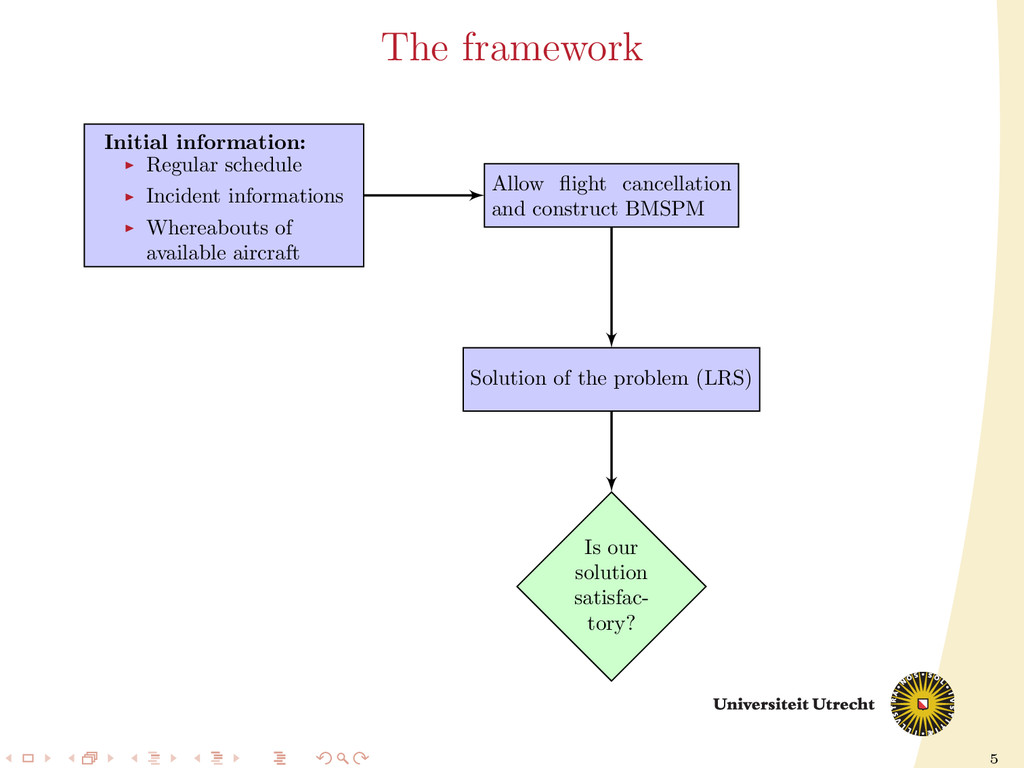
single fleets (one type of airplane). In reality there are several types of airplanes which can support each other (i.e. an idle large aircraft can serve flights scheduled for a missing small airplane, but not the other way around). Our model: BMSPM (Basic Multifleet Schedule Perturbation Model)
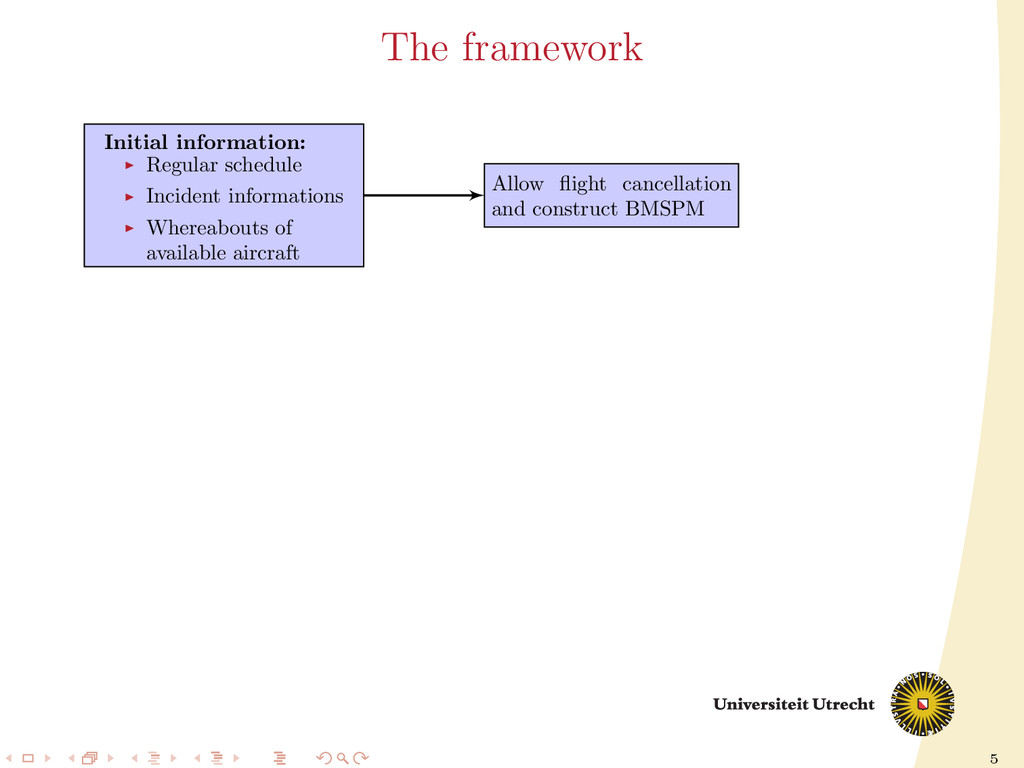
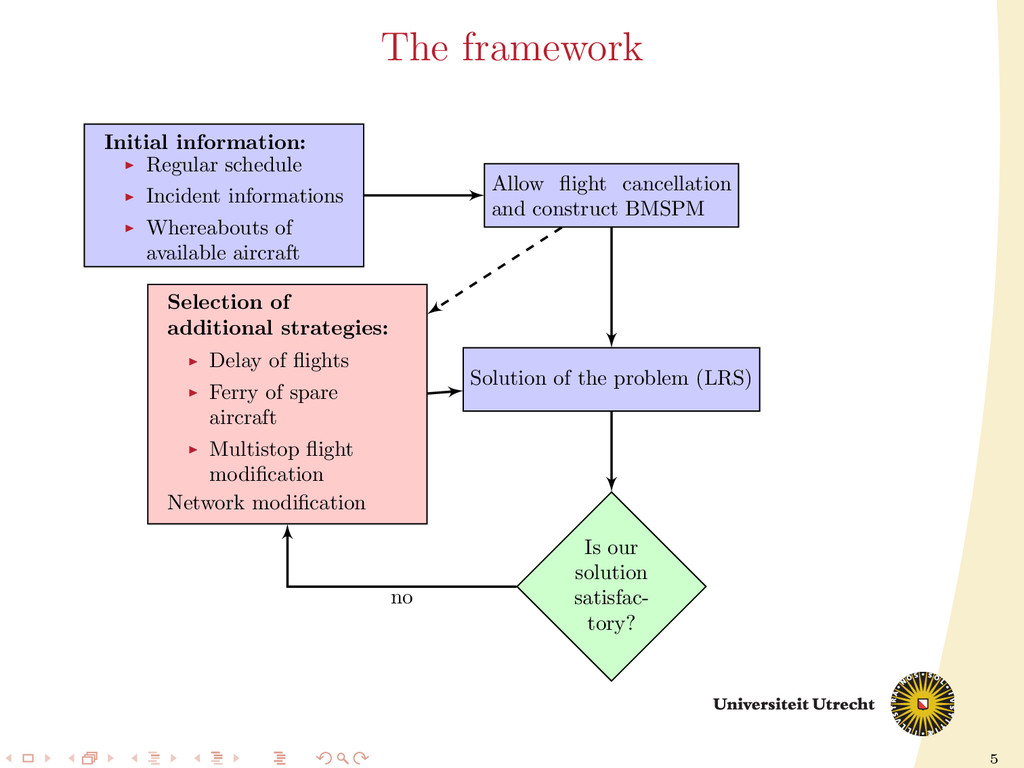
of available aircraft Allow flight cancellation and construct BMSPM Selection of additional strategies: Delay of flights Ferry of spare aircraft Multistop flight modification Network modification Solution of the problem (LRS) Is our solution satisfac- tory? no
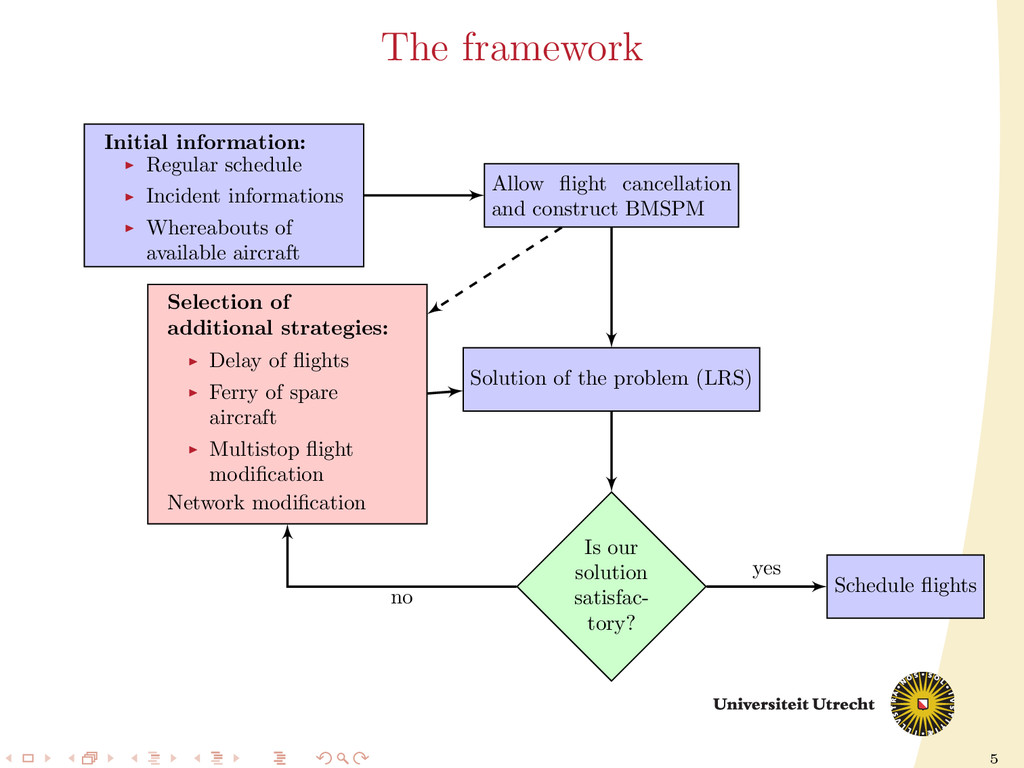
of available aircraft Allow flight cancellation and construct BMSPM Selection of additional strategies: Delay of flights Ferry of spare aircraft Multistop flight modification Network modification Solution of the problem (LRS) Is our solution satisfac- tory? Schedule flights no yes
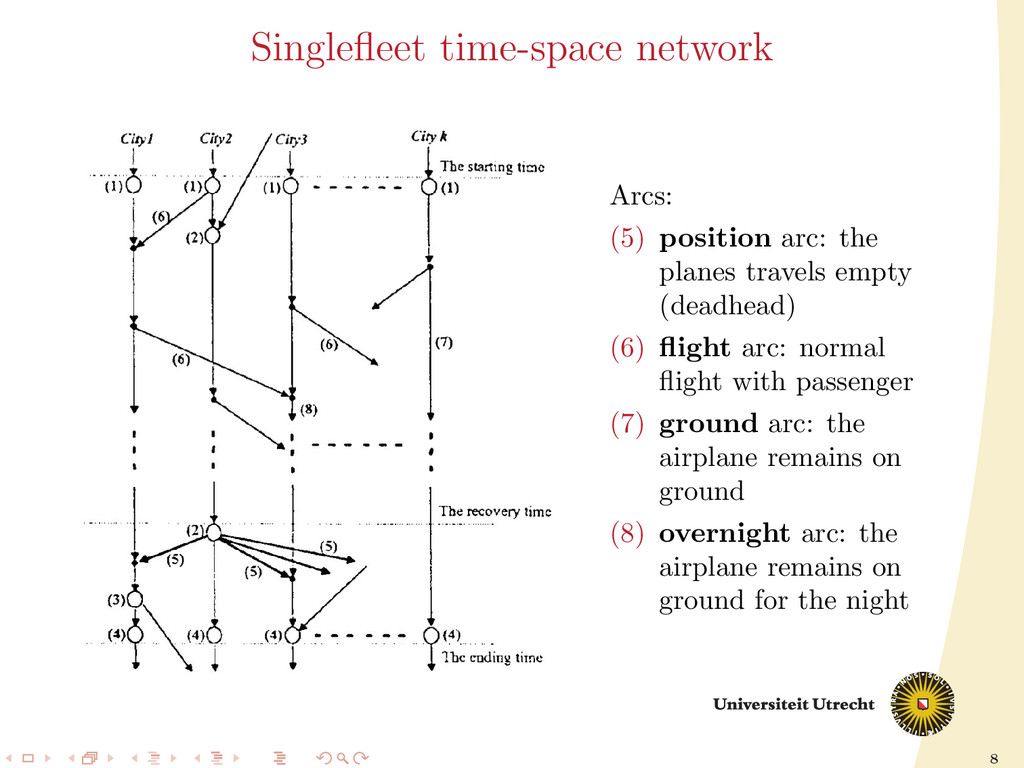
is suddenly unavailable. The pertubation is characterized by: starting time: the airplane becomes unavailable recovery time: the airplane is back (e.g. repaired) ending time: the regular schedule resumes We construct a multicommodity flow network (multiple supply/demand nodes).
airport at starting time (2) intermediate supply: airplanes flying at starting time, recovered airplane (3) intermediate demand: airplane flying at ending time (4) final demand: airplane at airport at ending time
travels empty (deadhead) (6) flight arc: normal flight with passenger (7) ground arc: the airplane remains on ground (8) overnight arc: the airplane remains on ground for the night
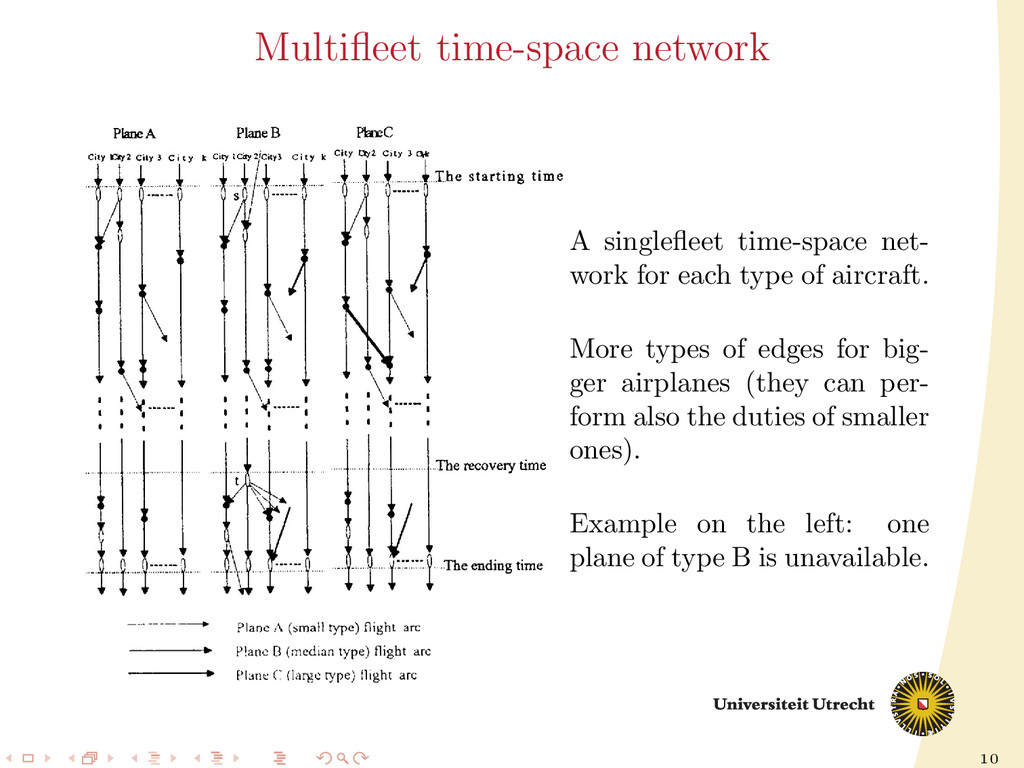
each type of aircraft. More types of edges for big- ger airplanes (they can per- form also the duties of smaller ones). Example on the left: one plane of type B is unavailable.
aircraft instead of a smaller one can have additional costs (e.g. changing gate/crew) that should be taken into account in the cost of the edge. Once we have constructed our network, we proceed by computing a minimum integer cost flow: since we consider passenger revenues to be negative, we are effectively maximizing the total profit.
unavailable airplane may be too expensive. We add flexibility to our model by allowing: delay of flights ferrying of idle aircrafts modification of multistop flights
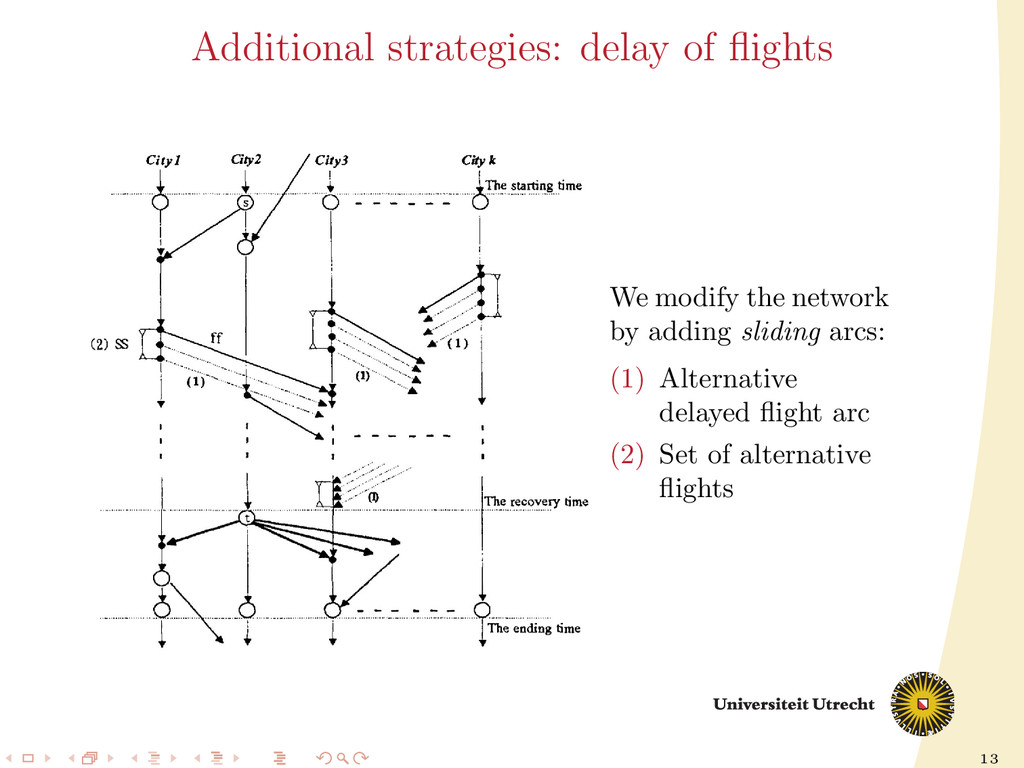
similar to the original ones but with additional delay costs and potential losses of passenger revenues. Additional constraints: at most one flight among these alternatives can be chosen. The number of sliding arcs can be set independently for each flight: trade-off between the added flexibility and the increased size of the problem usually set according to carrier experience and needs
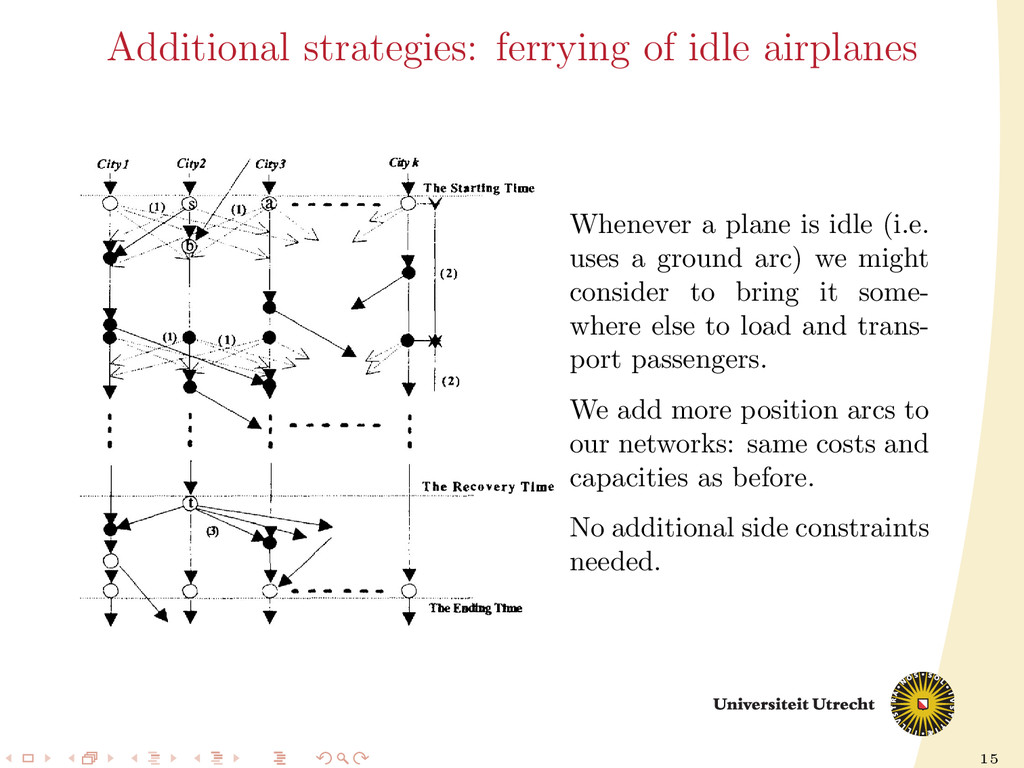
is idle (i.e. uses a ground arc) we might consider to bring it some- where else to load and trans- port passengers. We add more position arcs to our networks: same costs and capacities as before. No additional side constraints needed.
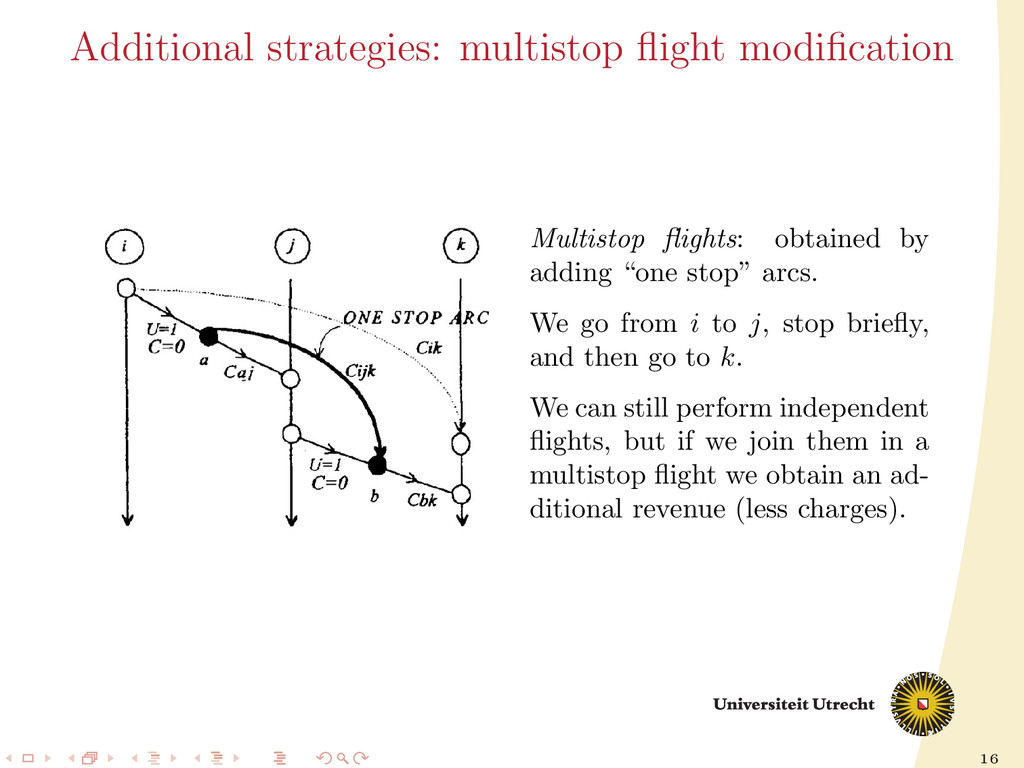
adding “one stop” arcs. We go from i to j, stop briefly, and then go to k. We can still perform independent flights, but if we join them in a multistop flight we obtain an ad- ditional revenue (less charges).
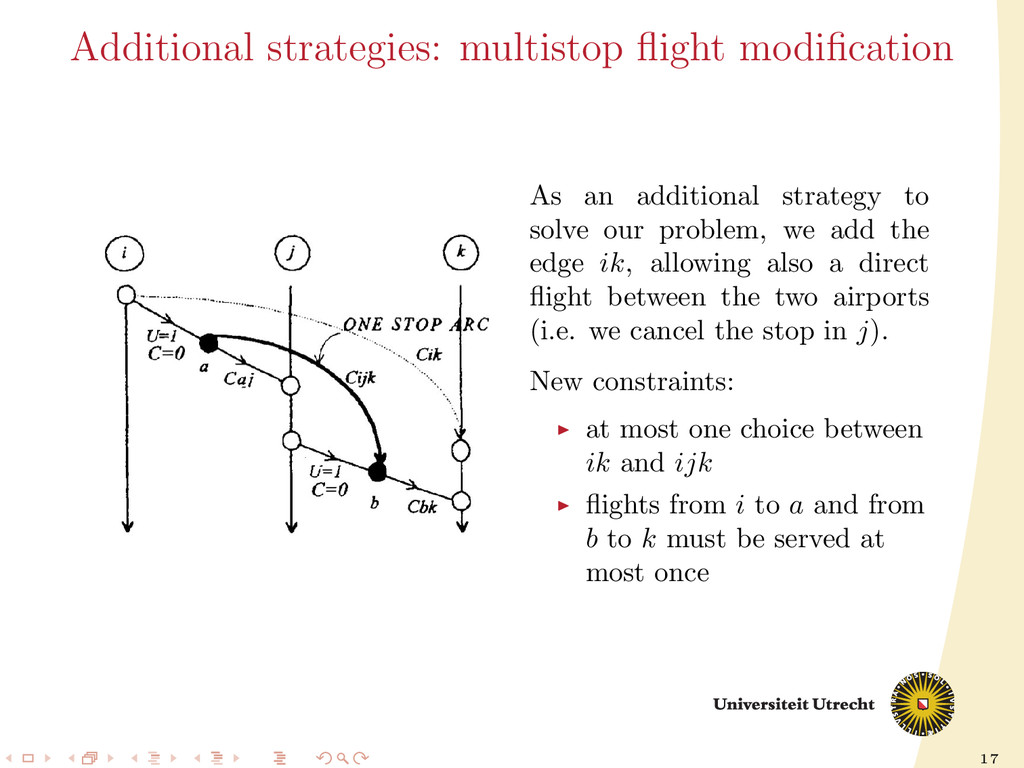
to solve our problem, we add the edge ik, allowing also a direct flight between the two airports (i.e. we cancel the stop in j). New constraints: at most one choice between ik and ijk flights from i to a and from b to k must be served at most once
integer multi-commodity network flow problem is NP-hard we want quickly a “good enough” solution to cope with emergency of unavailable flight(s) Our strategy: Lagrangean Relaxation with Subgradient methods (LRS) fast convergence efficient allocation of memory space
follows: 1) Find a lower bound using Lagrangean relaxation; 2) Find an upper bound (feasible solution) starting from the lower one; 3) Reduce the gap between the bounds by modifying the Lagrangean multiplier, using a subgradient method.
side constraints. The Lagrangean problem can then be decomposed into several independent network flow subproblems, and solved with the efficient network simplex method. The optimal objective of such subproblems is a lower bound on our original one.
typically unfeasible, and use a shortest path algorithm to find a least cost flow augmenting circuit passing a specified arc. If we have an unfeasible solution, then there must be (at least) a side constraint (a bundle of arcs) violated, so more than one arc in this bundle has 1 unit of flow. For all those violated constraints: 1) we specify one arc between those with the largest cost (after being modified by the Lagrangean relaxation) and reduce the flow to 0. 2) to maintain flow conservation, we find a least cost flow augmenting path from the arc tail to the arc head and augment a unit of flow troughout the path. 3) If the side constraint is not yet satisfied, we repeat the procedure. The networks are designed to have feasible solutions, so we can always find an initial upper bound.
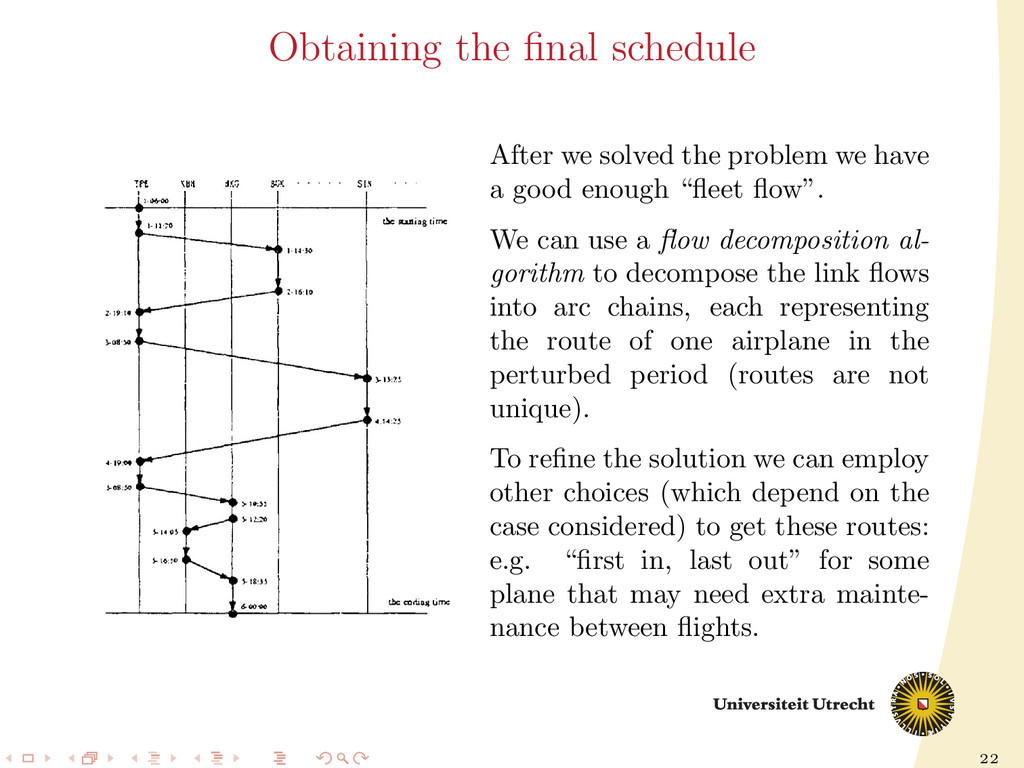
we have a good enough “fleet flow”. We can use a flow decomposition al- gorithm to decompose the link flows into arc chains, each representing the route of one airplane in the perturbed period (routes are not unique). To refine the solution we can employ other choices (which depend on the case considered) to get these routes: e.g. “first in, last out” for some plane that may need extra mainte- nance between flights.
airline’s international operations (China Airlines) of 1993. Data: 24 cities weekly timetable 273 flights ( 20% onestop) Resulting problem size: 8635 nodes, 34067 arcs. Results: Most of the models converged to 1% gap in less than 30 minutes. Four simpler models optimized within a minute
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}