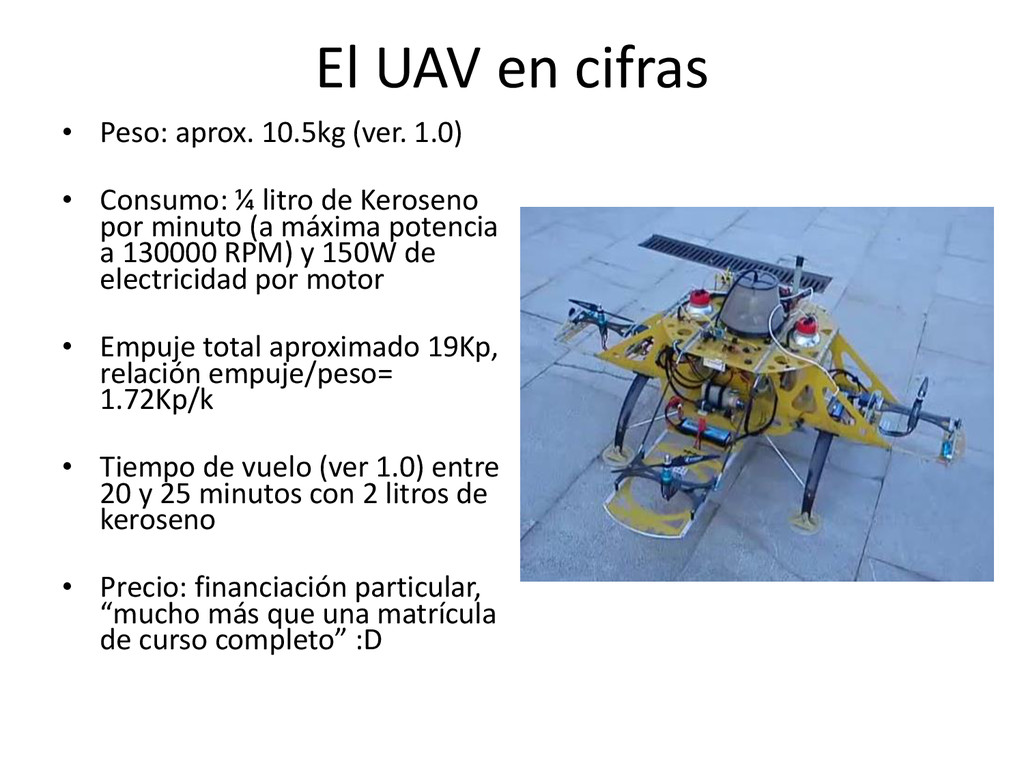
• Consumo: ¼ litro de Keroseno por minuto (a máxima potencia a 130000 RPM) y 150W de electricidad por motor • Empuje total aproximado 19Kp, relación empuje/peso= 1.72Kp/k • Tiempo de vuelo (ver 1.0) entre 20 y 25 minutos con 2 litros de keroseno • Precio: financiación particular, “mucho más que una matrícula de curso completo” :D
un mapa 3D para escoger lugares de aterrizaje y rutas para el rover • 2: Desarrollar un vehículo volador capaz de posar una sonda estática para medir las condiciones ambientales y tomar imágenes • 3: Crear un rover capaz de moverse en una superficie muy inclinada, con vegetación, rocas, pendientes y acantilados • 4: Misión avanzada: Desarrollo de un vehículo capaz de recoger al rover y devolverlo a casa (con muestras?) • Monitorización remota (desde la ETSIIT)
• Retos: – Autonomía (baterías, células solares…) – Precisión (basada en visión + GPS¿?) – Capaz de llevar carga (rover) • Inicialmente, lanzamiento desde cerca de la roca • Bonus extra: lanzar desde la ETSIIT
Locomoción – Autonomía (células solares): supervivencia – Condiciones atmosféricas (nieve, lluvia, temperatura, …) – Instrumentos científicos: cámaras, termómetro, etc. • En cualquier caso: el presupuesto es el gran reto…
– Comunicación (web, redes soc., prensa, foto/video, logos, relac. comerciales) – Calidad y Seguridad – Sistemas (plataformas y apoyo) – Visualización y realismo (montajes 3D) – Energía y propulsión – Mecánica y fabricación – Navegación y control – Sensores/carga científica – Telemetría/telecom – Control de la Misión (SCADA) – segmento terreno – Computación de abordo (plataformas y soft de vuelo)
con control de versiones (GitHub o similar) • Necesidad de un repositorio de documentación compartida (presentaciones, diseños, etc.) • Debe tener capacidad de gestionar imágenes y video HD. • Necesidad de una plataforma de visualización de datos experimentales (gráficas, promedios, etc. – ej. Temperatura registrada)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}