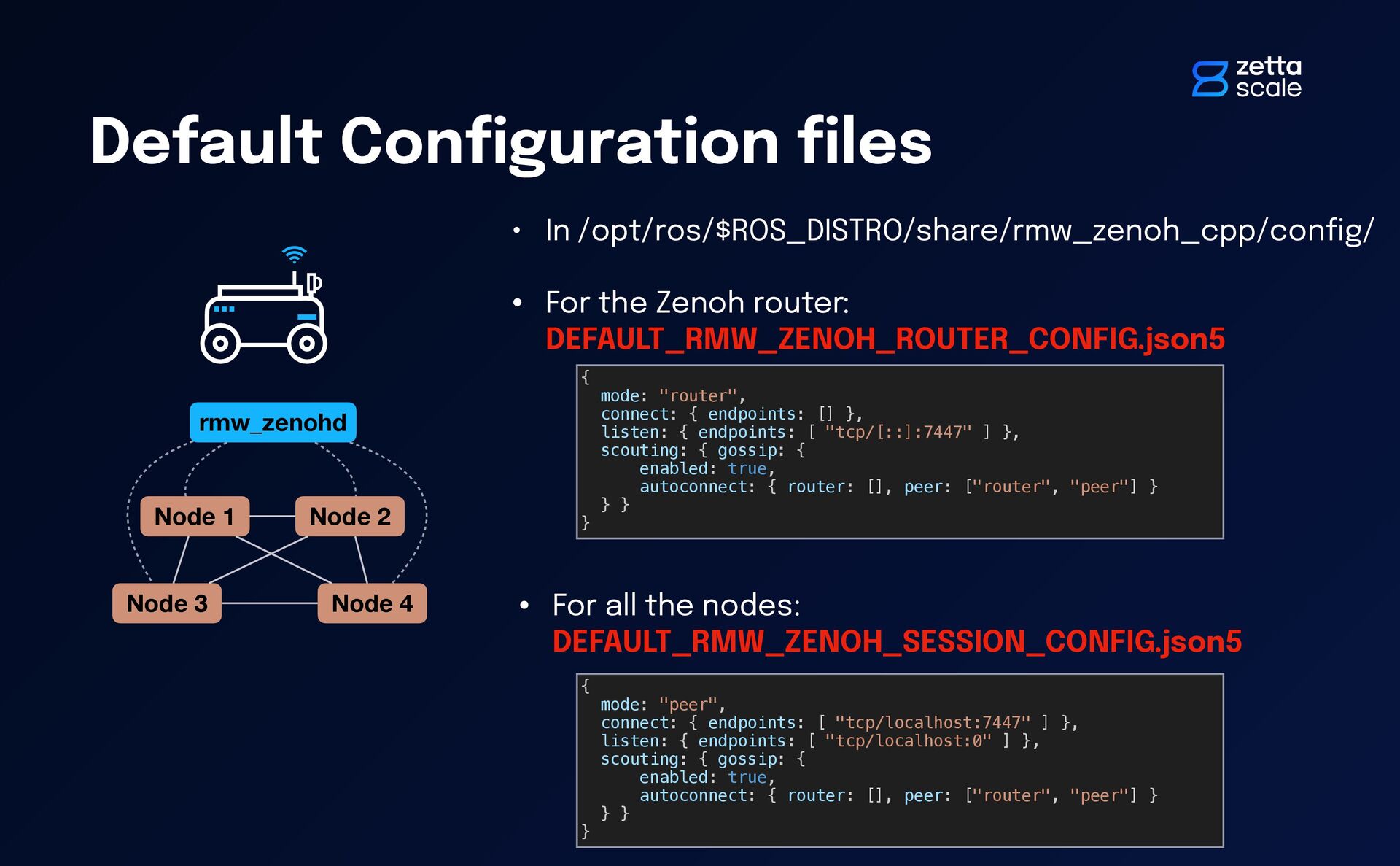
Node 3 Node 4 rmw_zenohd • In /opt/ros/$ROS_DISTRO/share/rmw_zenoh_cpp/con fi g/ • For the Zenoh router: DEFAULT_RMW_ZENOH_ROUTER_CONFIG.json5 • For all the nodes: DEFAULT_RMW_ZENOH_SESSION_CONFIG.json5 { mode: "router", connect: { endpoints: [] }, listen: { endpoints: [ "tcp/[::]:7447" ] }, scouting: { gossip: { enabled: true, autoconnect: { router: [], peer: ["router", "peer"] } } } } { mode: "peer", connect: { endpoints: [ "tcp/localhost:7447" ] }, listen: { endpoints: [ "tcp/localhost:0" ] }, scouting: { gossip: { enabled: true, autoconnect: { router: [], peer: ["router", "peer"] } } } }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}