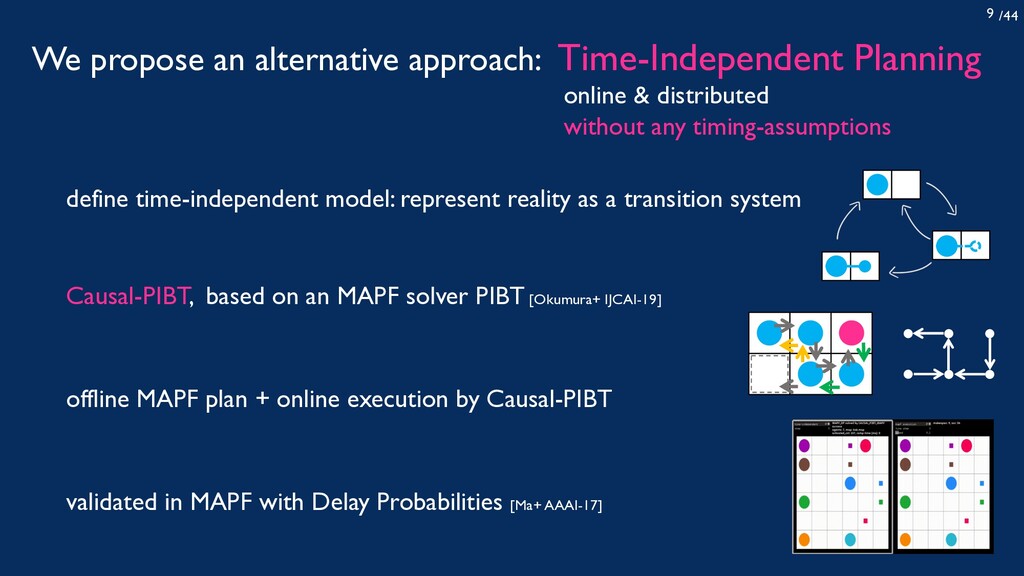
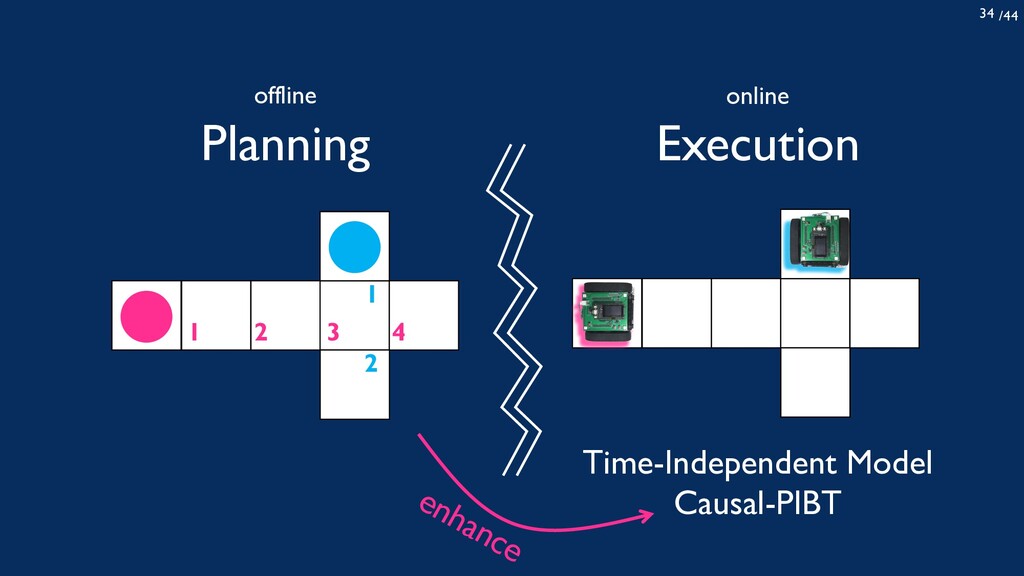
time-independent model: represent reality as a transition system Causal-PIBT, based on an MAPF solver PIBT [Okumura+ IJCAI-19] offline MAPF plan + online execution by Causal-PIBT validated in MAPF with Delay Probabilities [Ma+ AAAI-17] online & distributed without any timing-assumptions
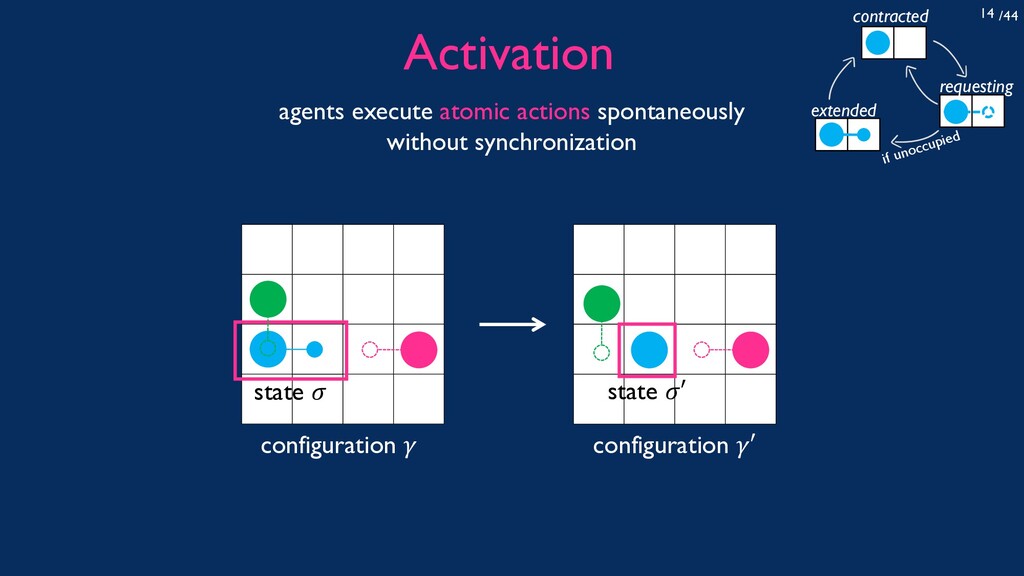
transition systems spontaneously change its state, e.g., location, destination, mode, internal variables change its configuration according to atomic actions of agents i.e., agents
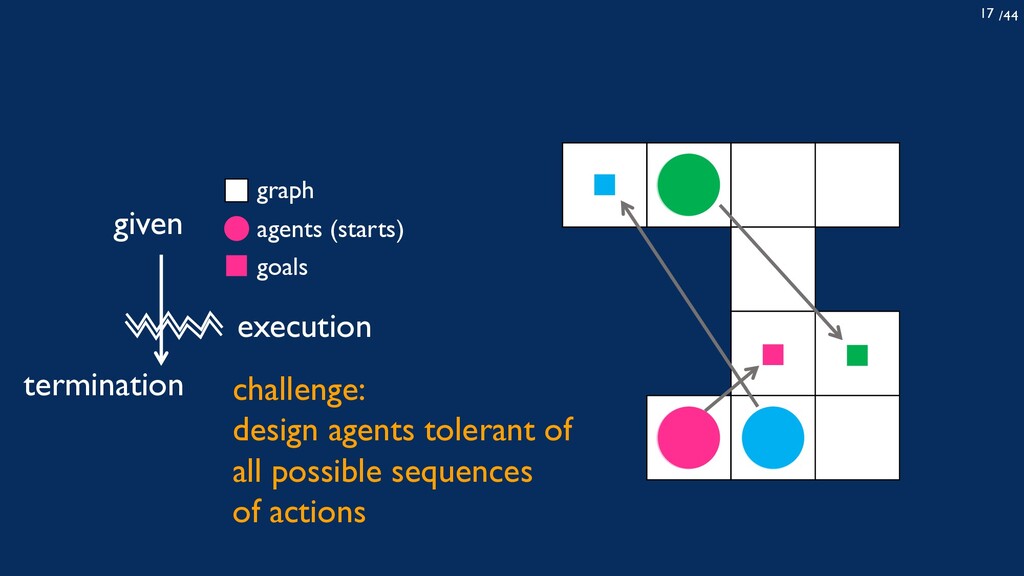
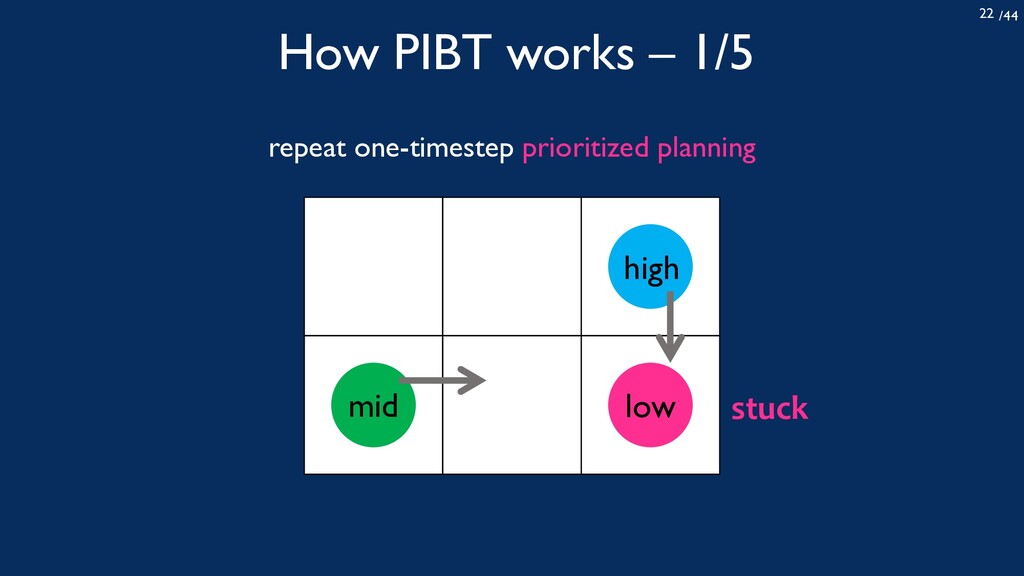
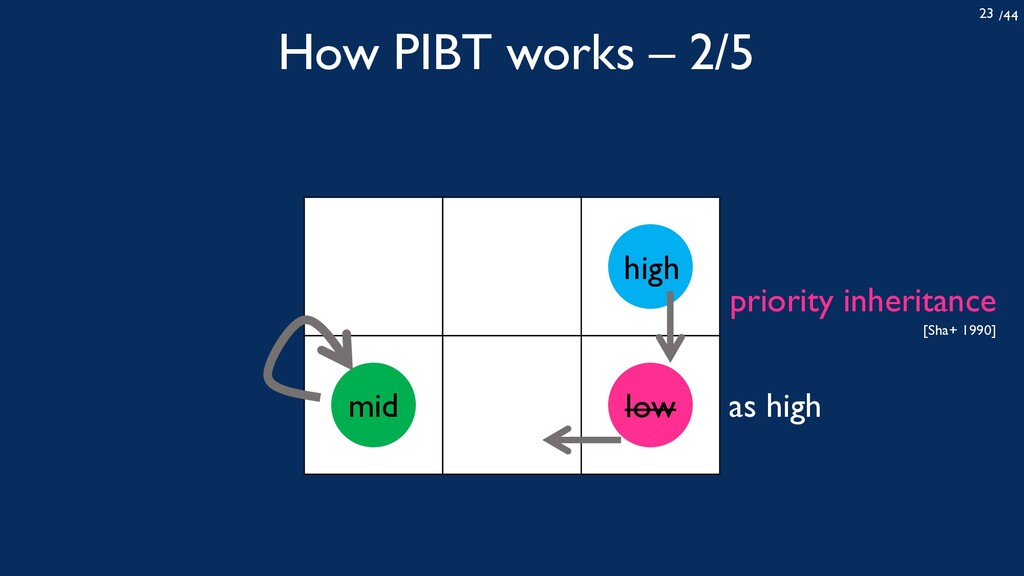
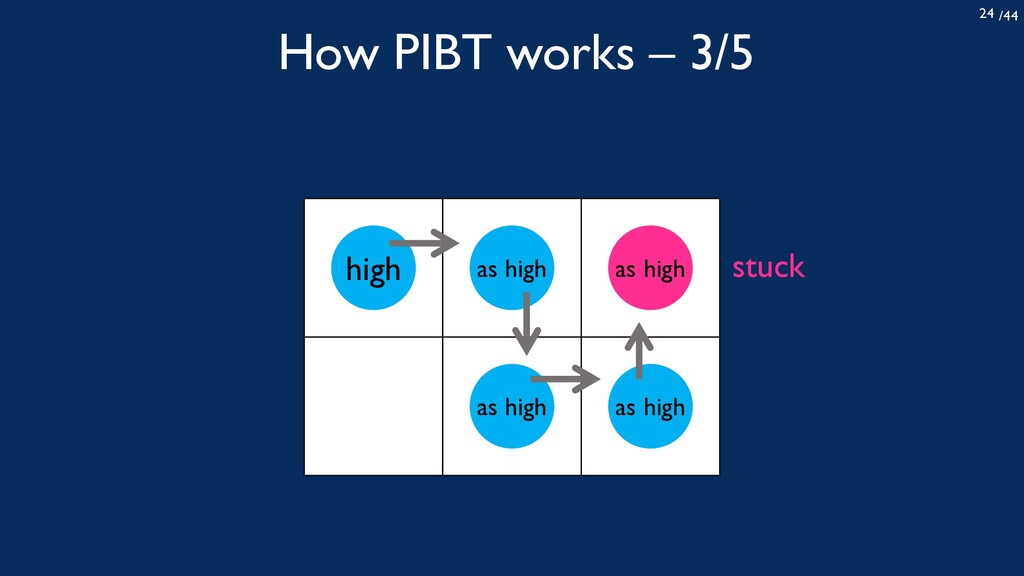
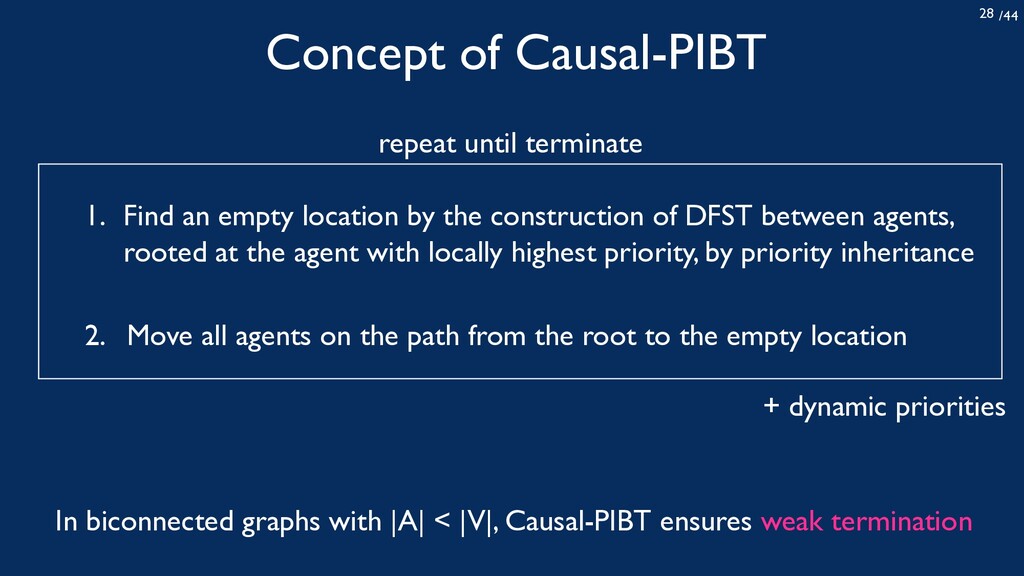
can move to any adjacent locations all agents reach their goals within finite timesteps +dynamic priorities c.f. , weak termination How PIBT works – 5/5
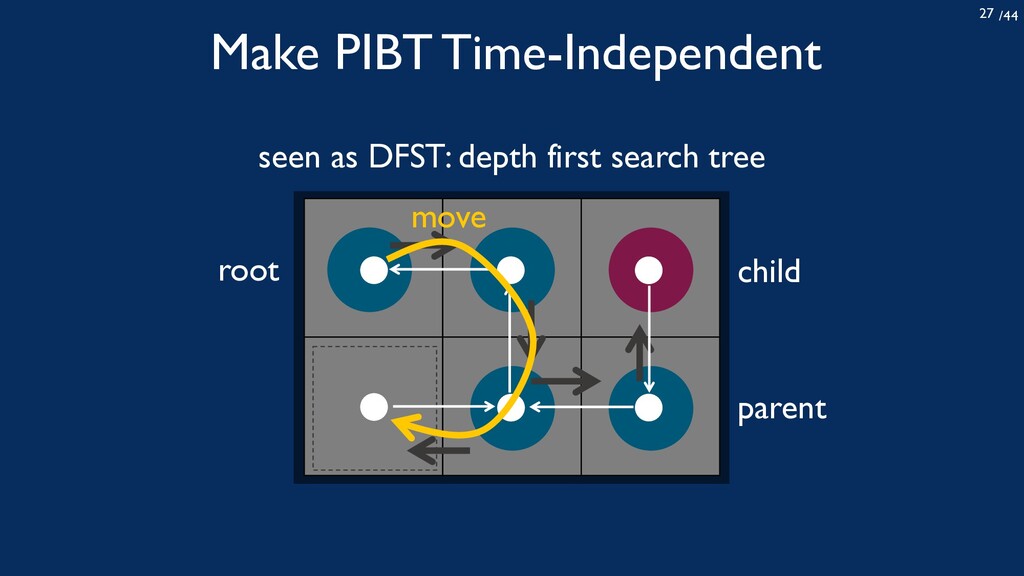
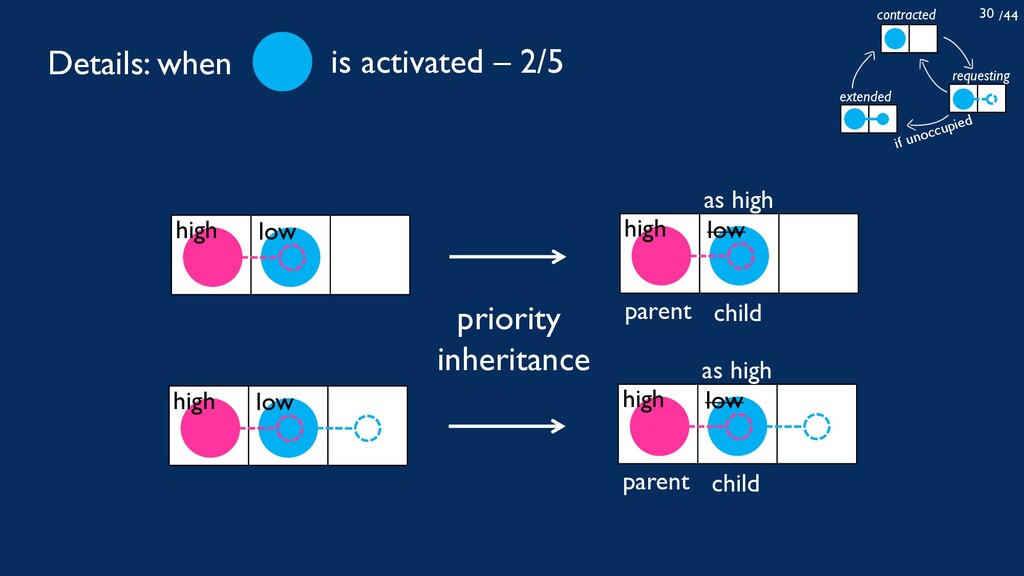
the construction of DFST between agents, rooted at the agent with locally highest priority, by priority inheritance 1. Move all agents on the path from the root to the empty location 2. repeat until terminate + dynamic priorities In biconnected graphs with |A| < |V|, Causal-PIBT ensures weak termination
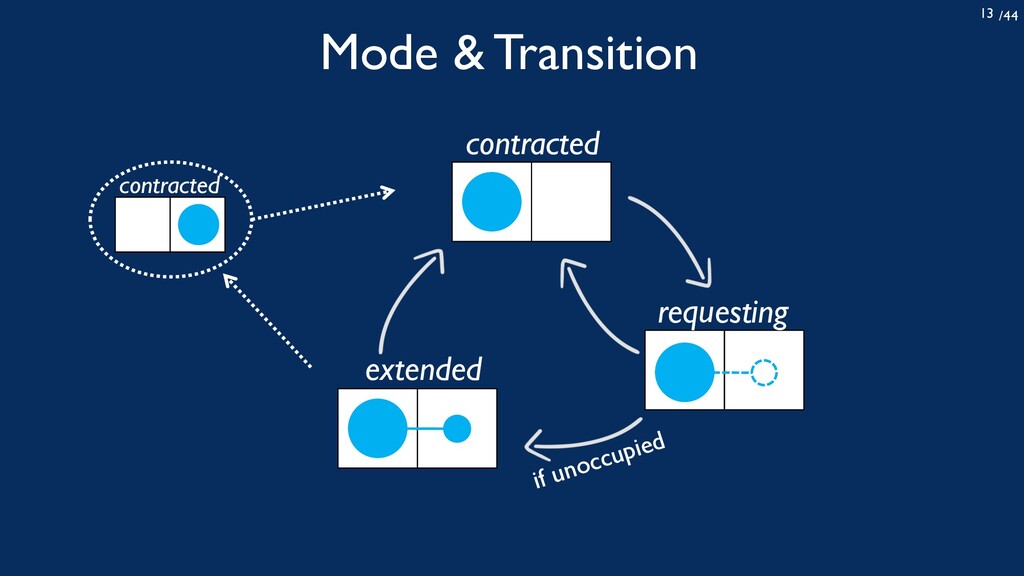
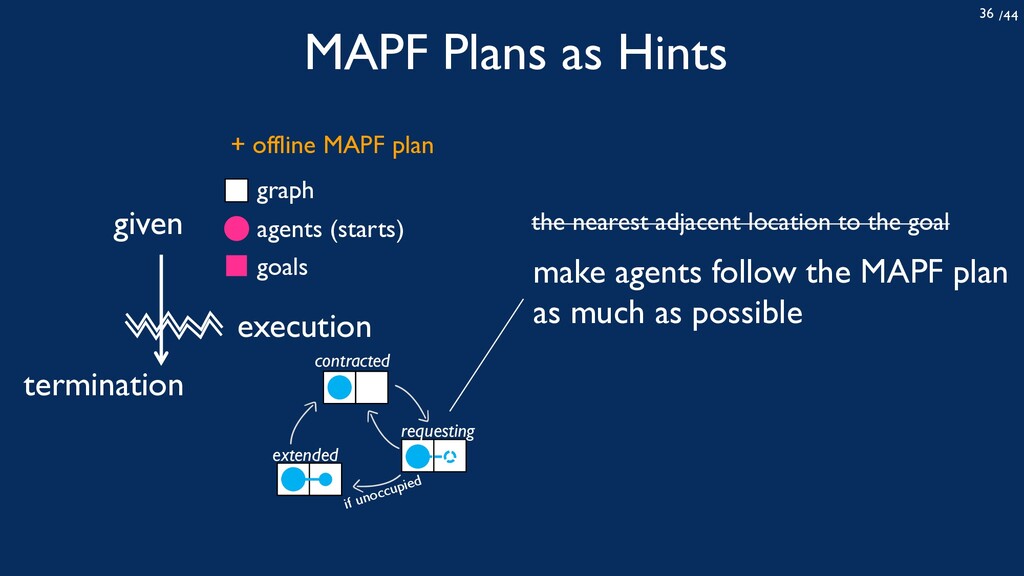
offline MAPF plan contracted requesting extended if unoccupied make agents follow the MAPF plan as much as possible MAPF Plans as Hints the nearest adjacent location to the goal
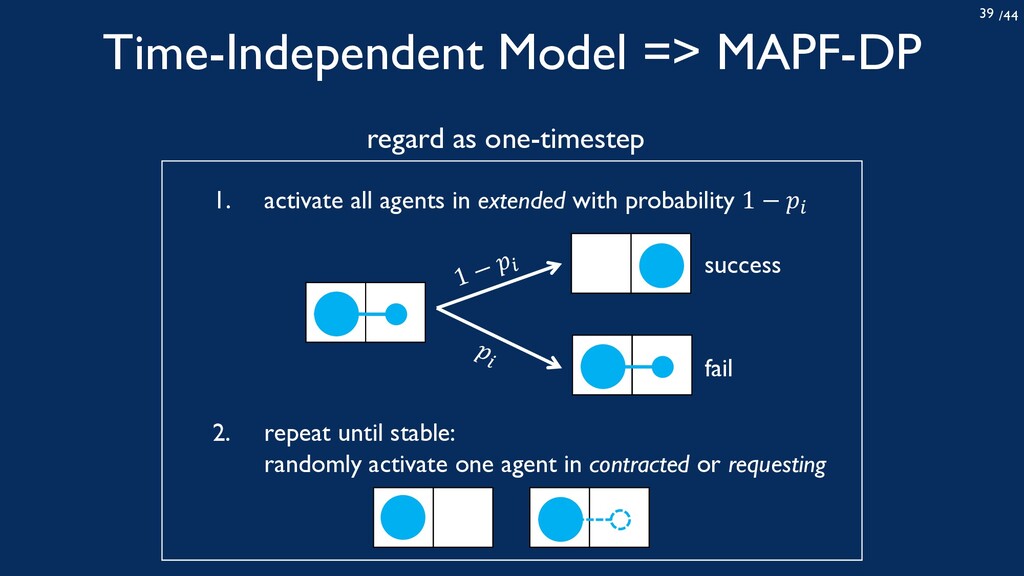
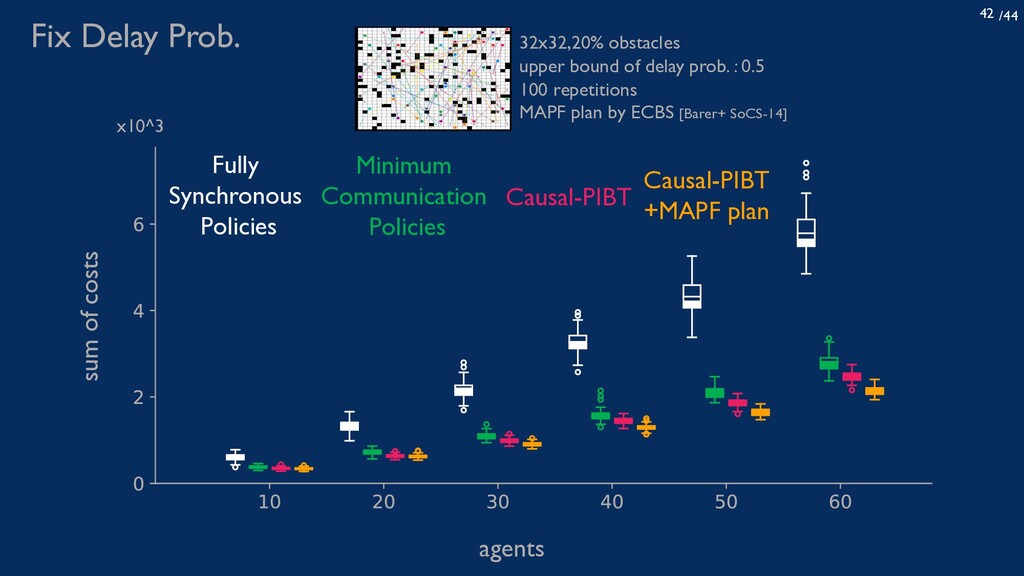
in extended with probability 1 − 𝑝! success fail 1 − 𝑝! 𝑝 ! 2. repeat until stable: randomly activate one agent in contracted or requesting regard as one-timestep
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![/44 6 Execution Policies [Ma+ AAAI-17] Fully Synchronized Policies Minimum](https://files.speakerdeck.com/presentations/ebeaf92aa6e3442a90967977e38be549/slide_5.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![/44 21 PIBT Priority Inheritance with Backtracking [Okumura+ IJCAI-19] solving](https://files.speakerdeck.com/presentations/ebeaf92aa6e3442a90967977e38be549/slide_20.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![/44 38 MAPF-DP (with Delay Probabilities) [Ma+ AAAI-17] 1 −](https://files.speakerdeck.com/presentations/ebeaf92aa6e3442a90967977e38be549/slide_37.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}