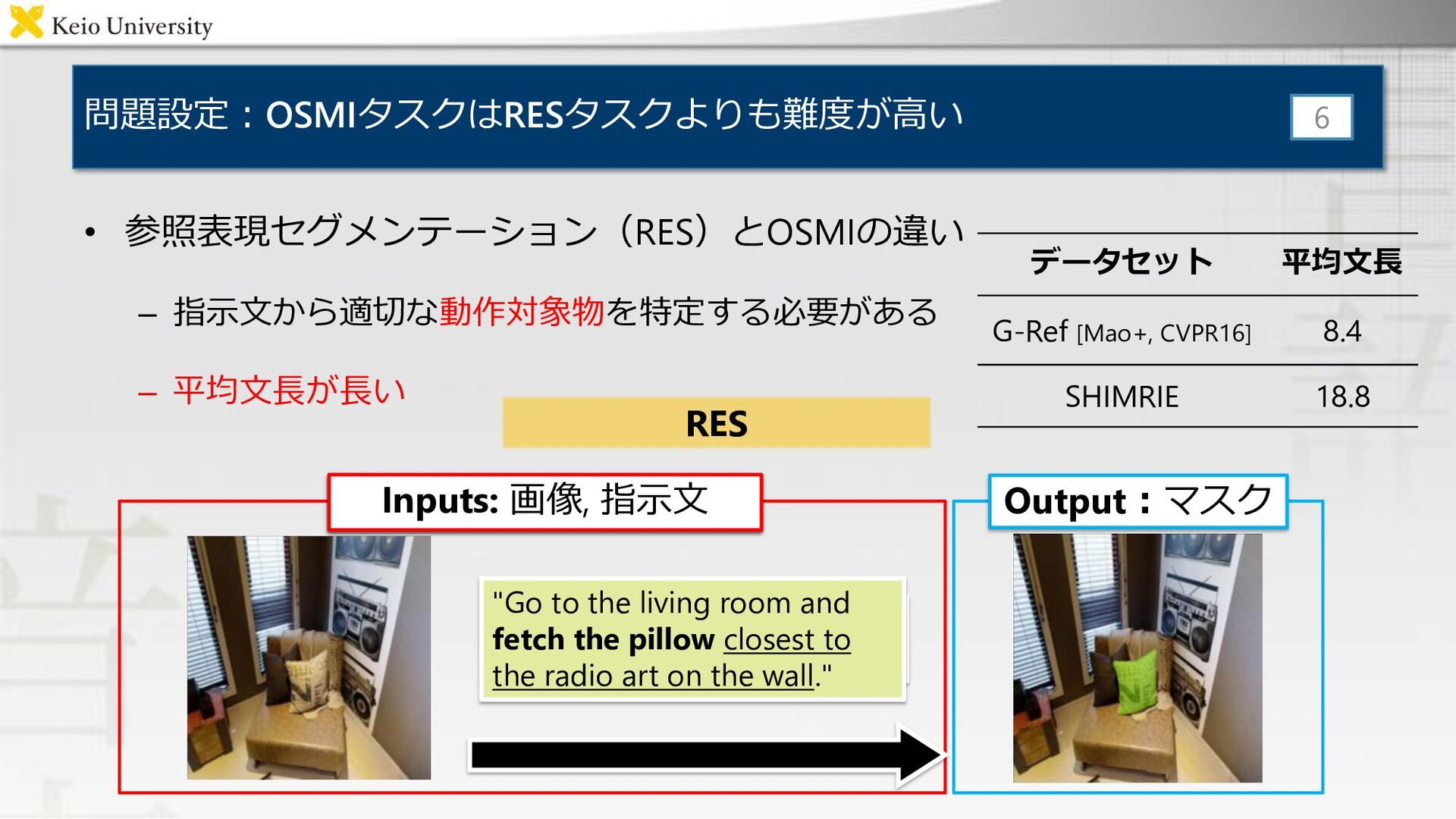
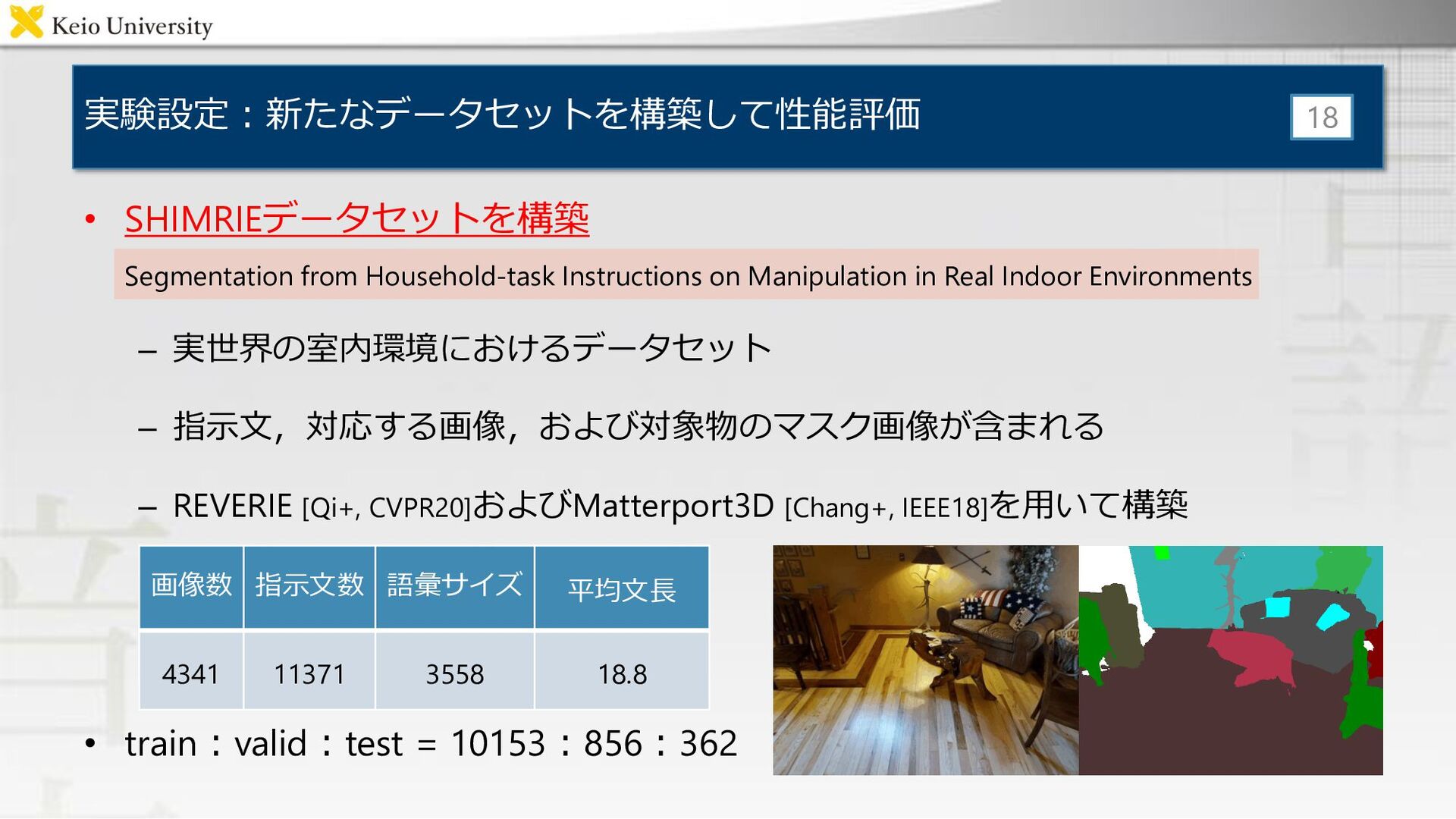
画像, 参照表現 問題設定:OSMIタスクはRESタスクよりも難度が高い • 参照表現セグメンテーション(RES)とOSMIの違い – 指示文から適切な動作対象物を特定する必要がある – 平均文長が長い 6 "Go to the living room and fetch the pillow closest to the radio art on the wall." Inputs: 画像, 指示文 Output:マスク データセット 平均文長 G-Ref [Mao+, CVPR16] 8.4 SHIMRIE 18.8 RES
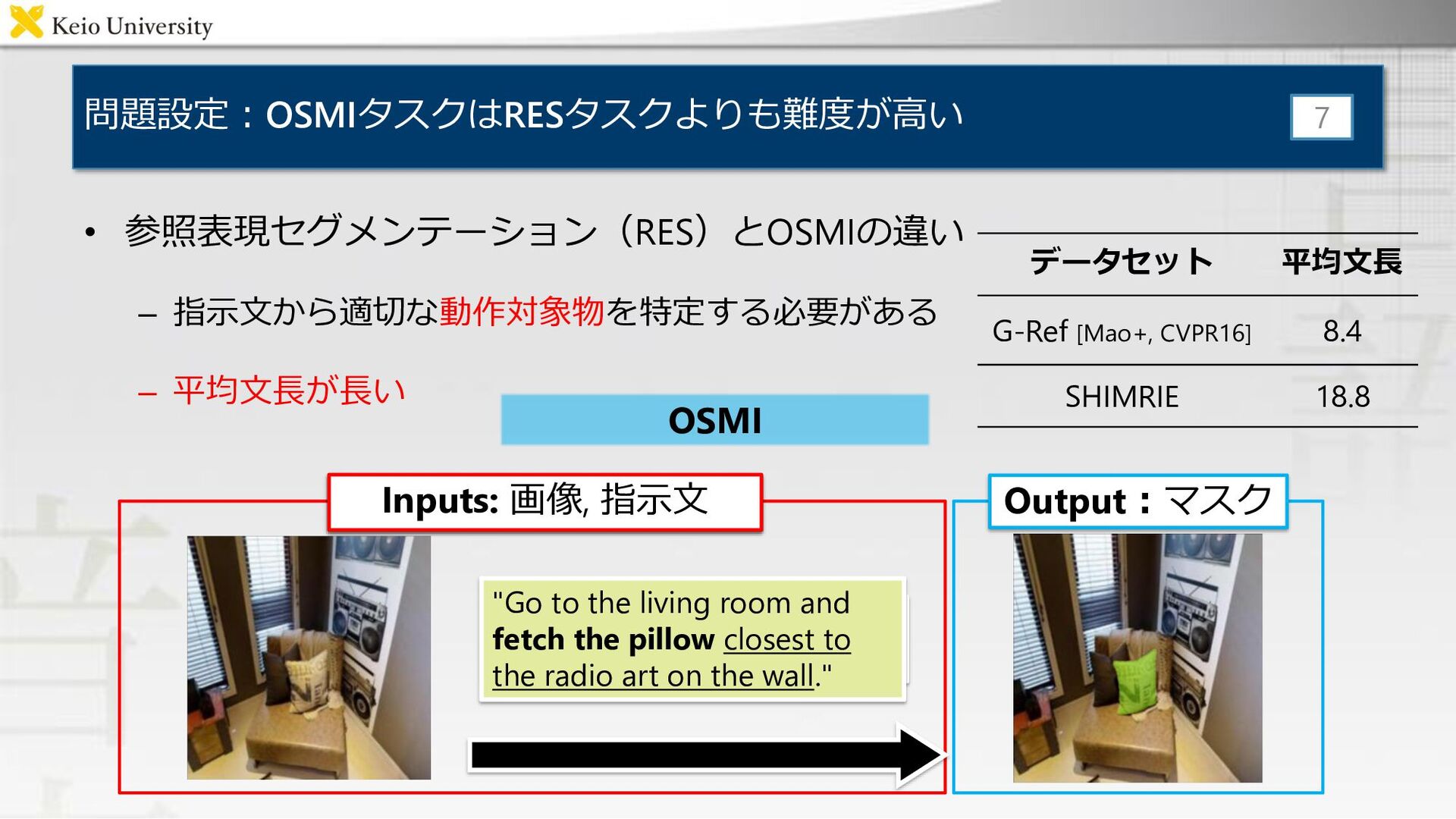
画像, 参照表現 問題設定:OSMIタスクはRESタスクよりも難度が高い • 参照表現セグメンテーション(RES)とOSMIの違い – 指示文から適切な動作対象物を特定する必要がある – 平均文長が長い 7 "Go to the living room and fetch the pillow closest to the radio art on the wall." Inputs: 画像, 指示文 Output:マスク データセット 平均文長 G-Ref [Mao+, CVPR16] 8.4 SHIMRIE 18.8 OSMI
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
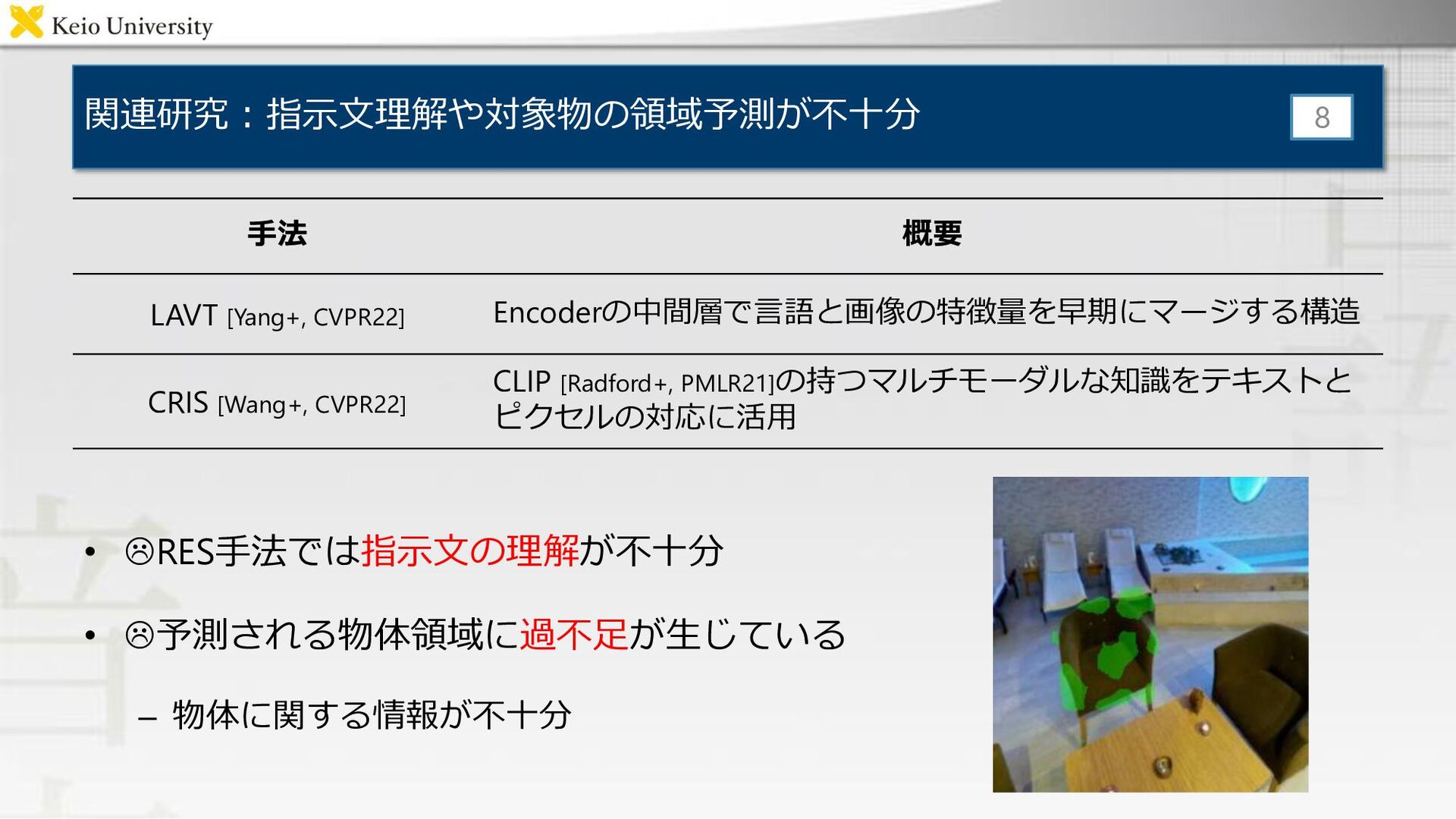
![関連研究:指示文理解や対象物の領域予測が不十分 9 手法 概要 LAVT [Yang+, CVPR22] Encoderの中間層で言語と画像の特徴量を早期にマージする構造 CRIS [Wang+,](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
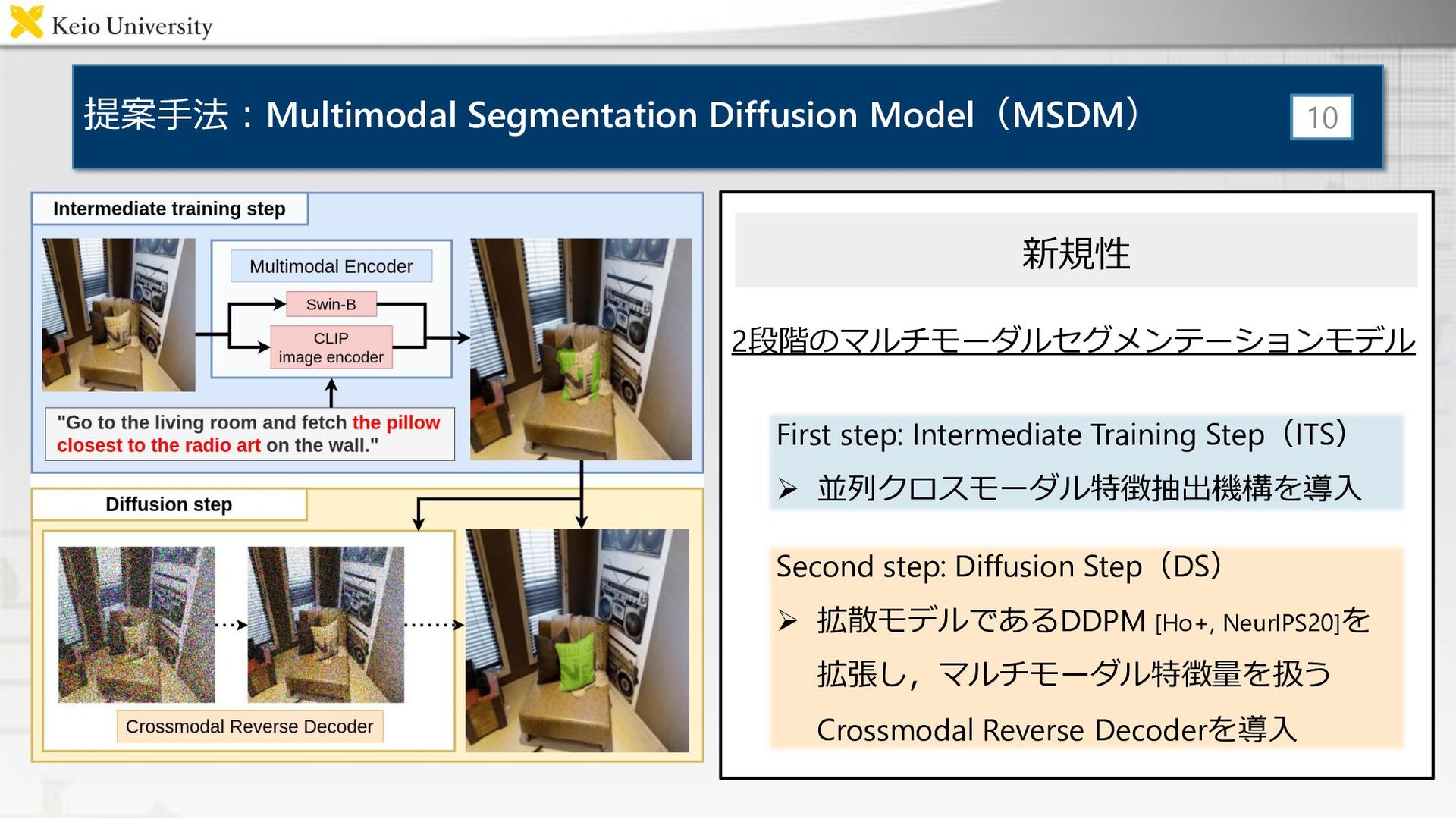
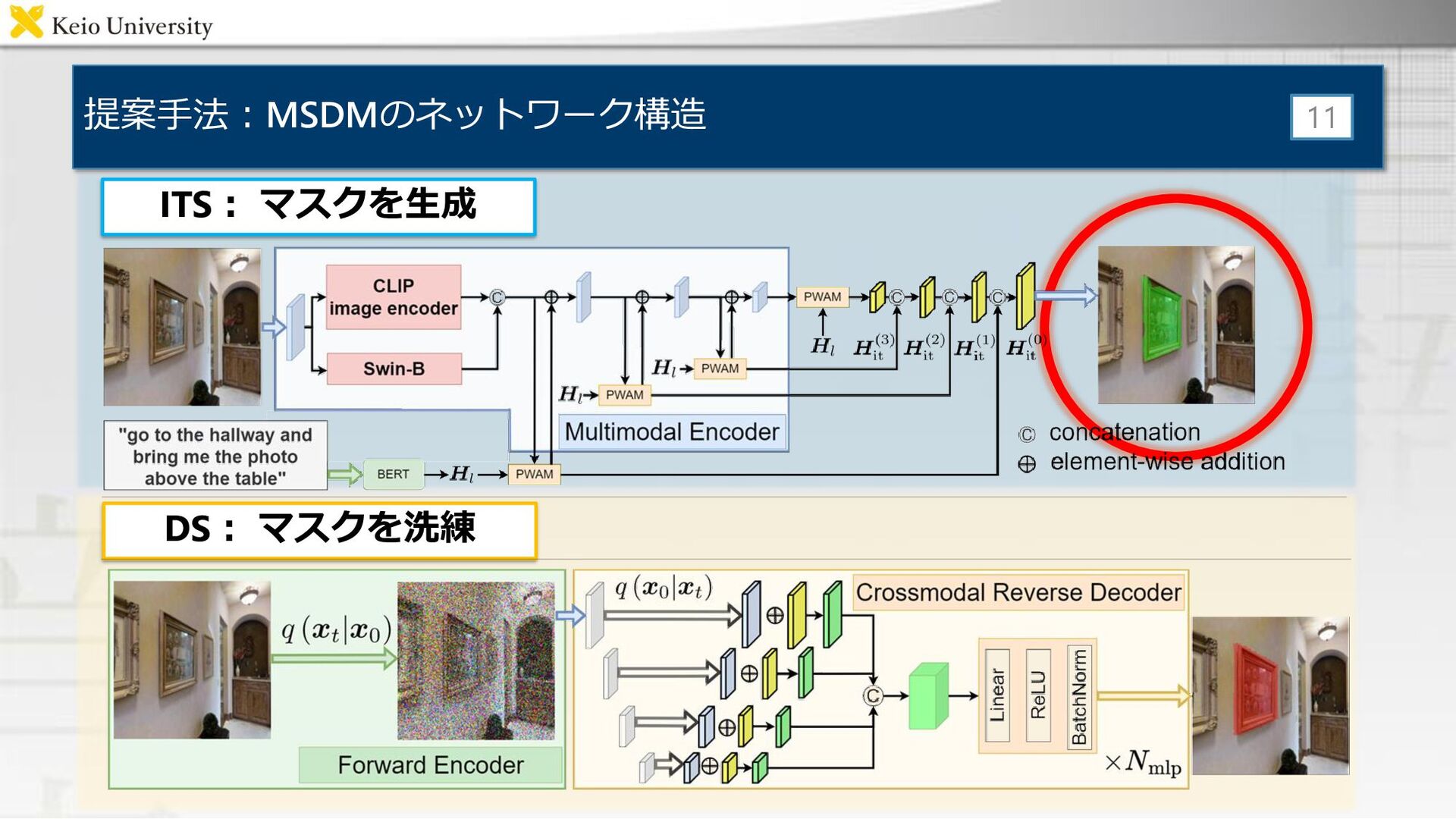
![ITS:並列クロスモーダル特徴抽出機構の導入とマスク生成 • Multimodal Encoder – 大規模視覚言語モデルCLIP+多様スケールに対応するSwin Transformer [Liu+, IEEE21] •](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![定量的結果:全ての評価尺度で既存手法の性能を上回る • 評価指標 – mIoU(mean IoU), oIoU(overall IoU), [email protected] 19](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_15.jpg){kind=link}
![定性的結果(成功例):指示文に適したセグメンテーションマスクの生成 • 指示文に適した領域の予測 20 [ベースライン手法: LAVT] 窓の外側の領域をマスク [提案手法: MSDM] ☺正しい絵画をマスク](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_16.jpg){kind=link}
![定性的結果(成功例):指示文に適したセグメンテーションマスクの生成 • 物体領域の予測性能の向上 21 [ベースライン手法: LAVT] 予測領域に不足 [提案手法: MSDM] ☺より正確な椅子の領域を予測](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
![Appendix:特徴量の選択におけるablation study 24 mIoU oIoU [email protected] [email protected] [email protected] [email protected] [email protected]](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_20.jpg){kind=link}
{kind=link}
{kind=link}
![Appendix:PWAMの構造 27 [Yang+, CVPR22]](https://files.speakerdeck.com/presentations/b64933cf4e4540c0b35dc19ab10f8818/slide_23.jpg){kind=link}
{kind=link}
{kind=link}