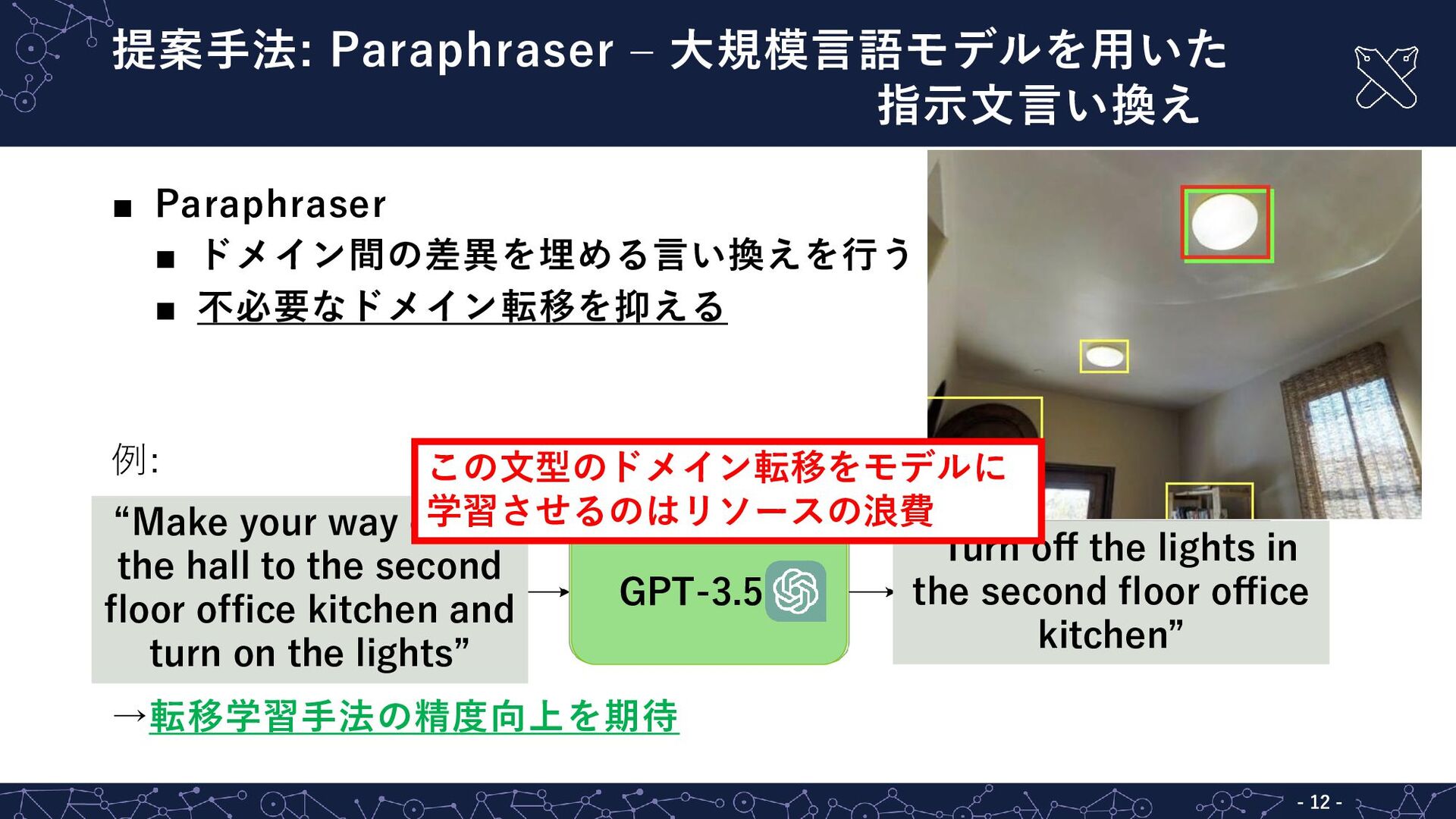
▪ ドメイン間の差異を埋める言い換えを行う ▪ 不必要なドメイン転移を抑える 例: →転移学習手法の精度向上を期待 “Make your way down the hall to the second floor office kitchen and turn on the lights” “Turn off the lights in the second floor office kitchen” GPT-3.5␣ この文型のドメイン転移をモデルに 学習させるのはリソースの浪費
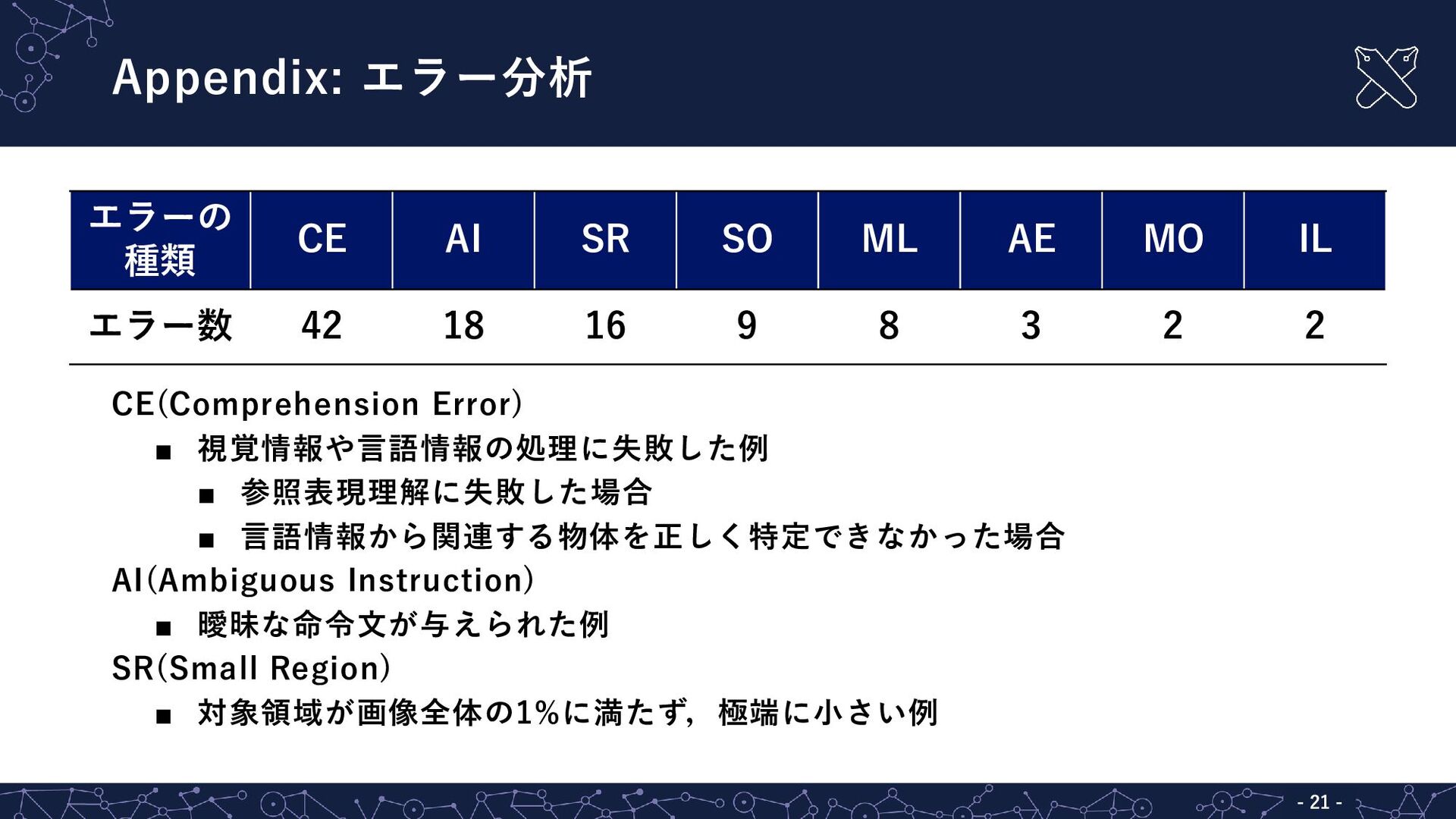
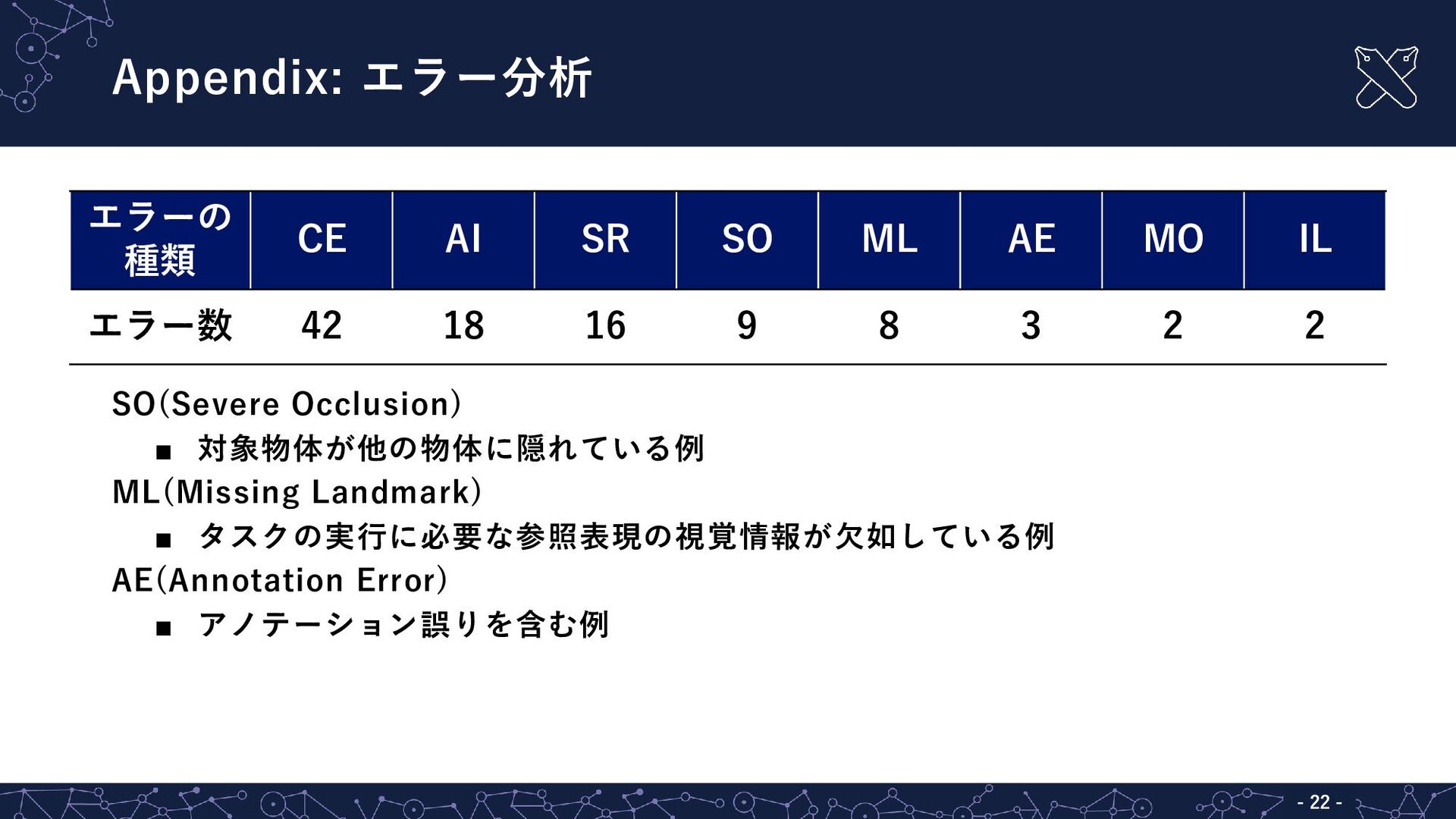
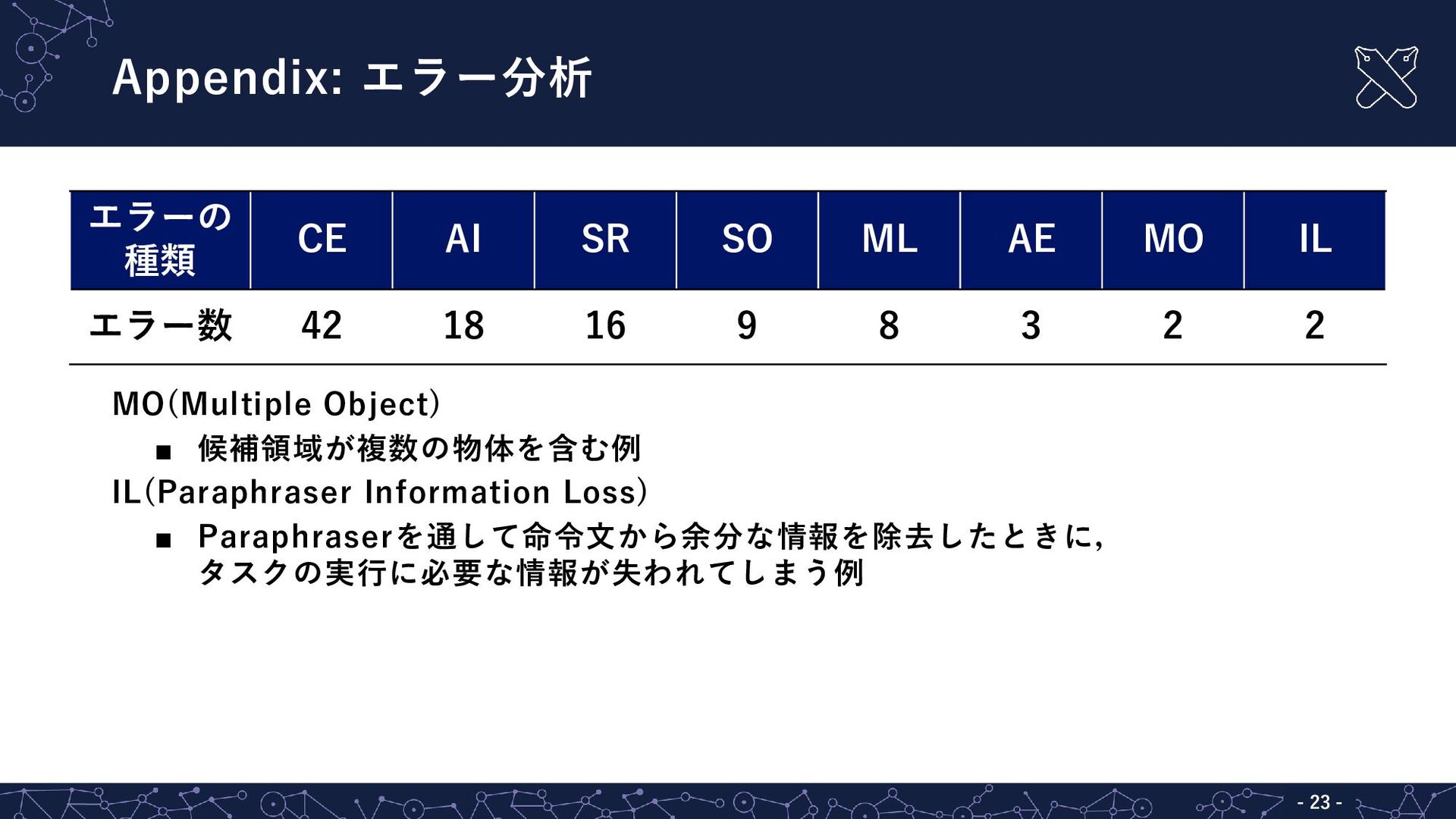
参照表現理解に失敗した場合 ▪ 言語情報から関連する物体を正しく特定できなかった場合 AI(Ambiguous Instruction) ▪ 曖昧な命令文が与えられた例 SR(Small Region) ▪ 対象領域が画像全体の1%に満たず,極端に小さい例 エラーの 種類 CE AI SR SO ML AE MO IL エラー数 42 18 16 9 8 3 2 2
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
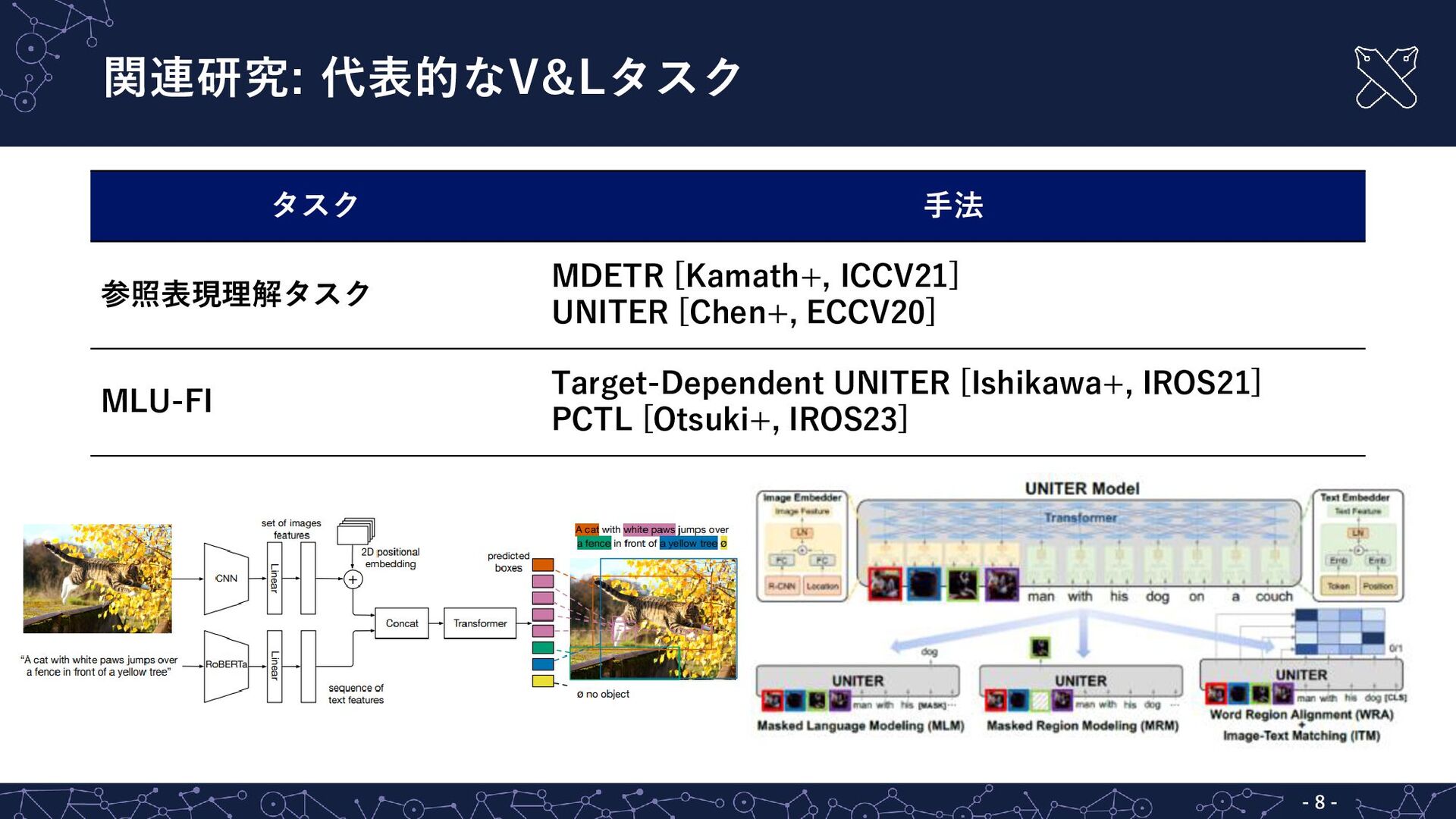
![関連研究:代表的なV&Lタスク - 9 - タスク 手法 参照表現理解タスク MDETR [Kamath+, ICCV21]](https://files.speakerdeck.com/presentations/441b5c380d2d427ca3cecd04374f830e/slide_8.jpg){kind=link}
![PCTL [Otsuki+, IROS23] - 10 - ▪ 2ドメイン間で対照学習を行う ▪ 対比損失Dual](https://files.speakerdeck.com/presentations/441b5c380d2d427ca3cecd04374f830e/slide_9.jpg){kind=link}
![PCTL [Otsuki+, IROS23] - 11 - ▪ 2ドメイン間で対照学習を行う ▪ 対比損失Dual](https://files.speakerdeck.com/presentations/441b5c380d2d427ca3cecd04374f830e/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
![データセット: VLNかつSim2realにおいて最大規模 - 14 - 実世界に基づくデータセット ▪ REVERIE-fetchデータセット [Otsuki+, IROS23]](https://files.speakerdeck.com/presentations/441b5c380d2d427ca3cecd04374f830e/slide_13.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}