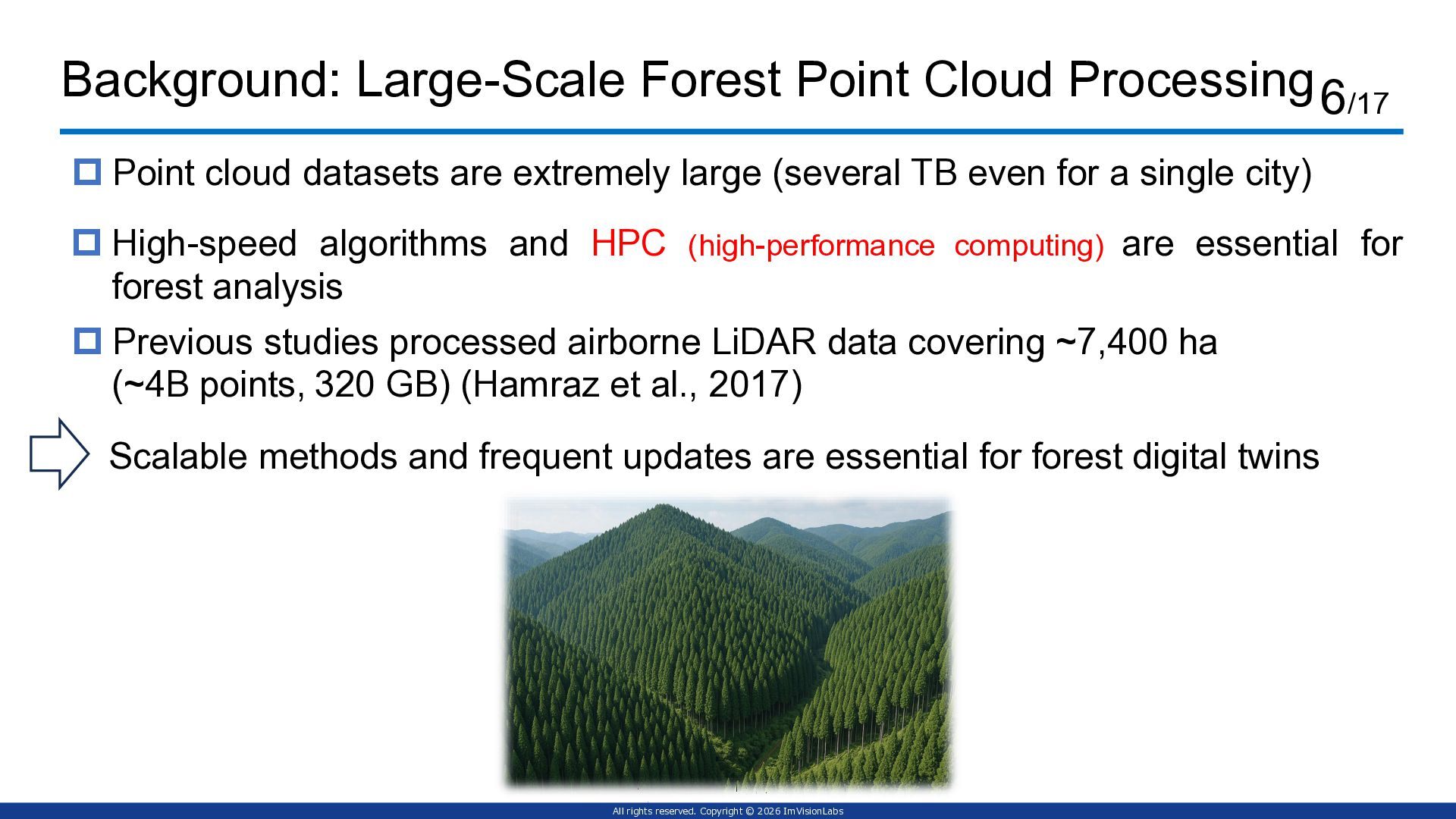
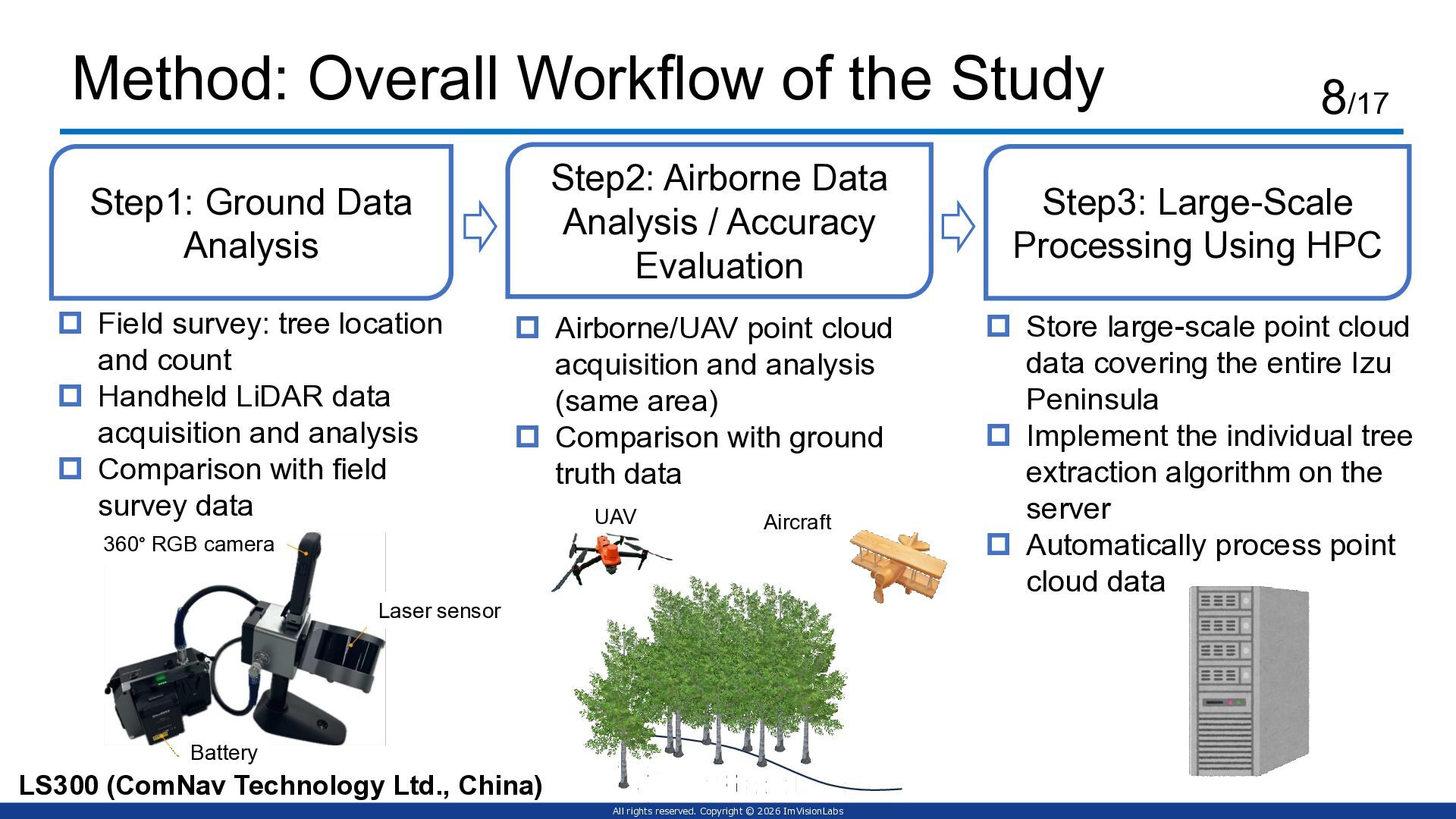
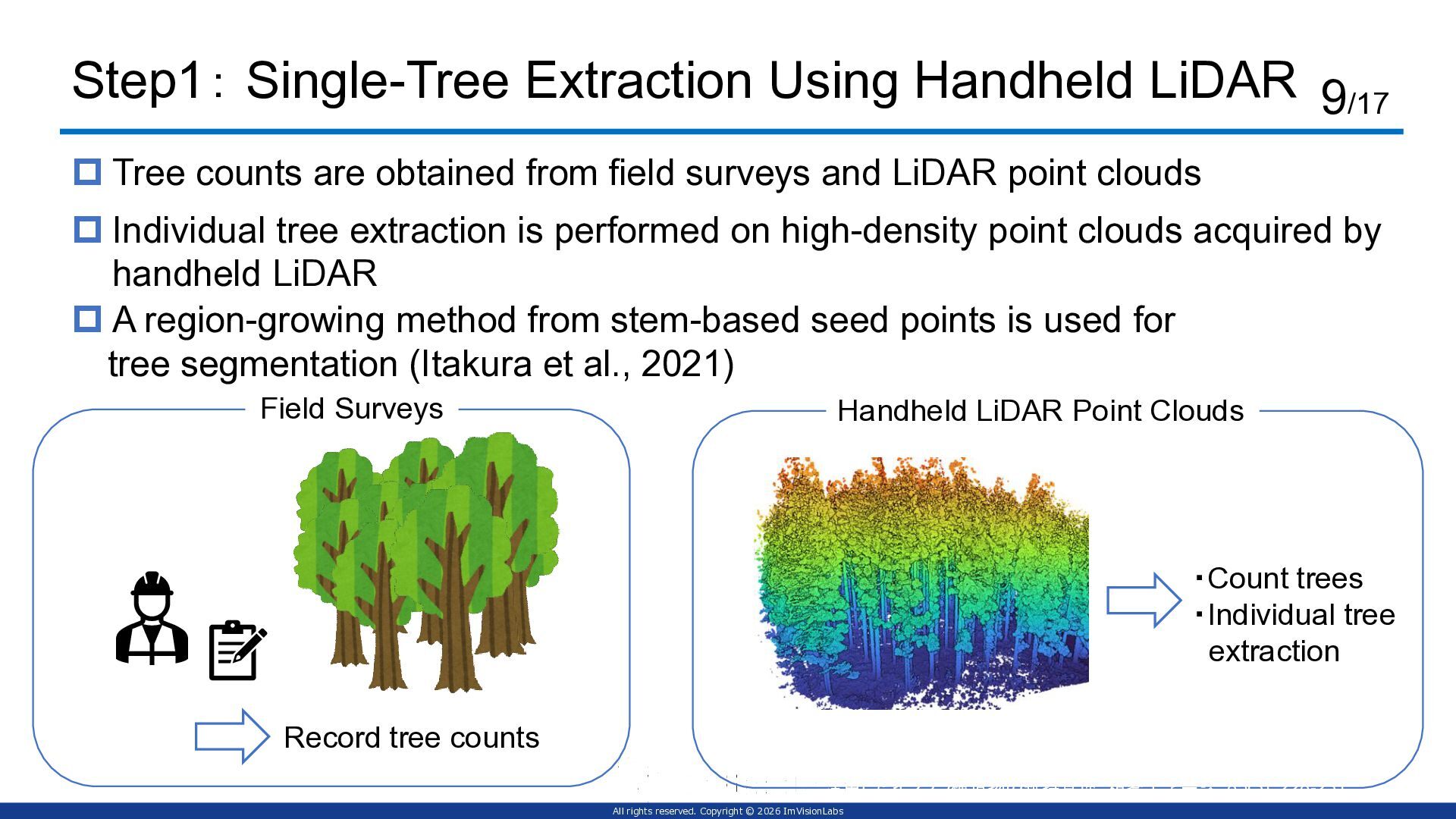
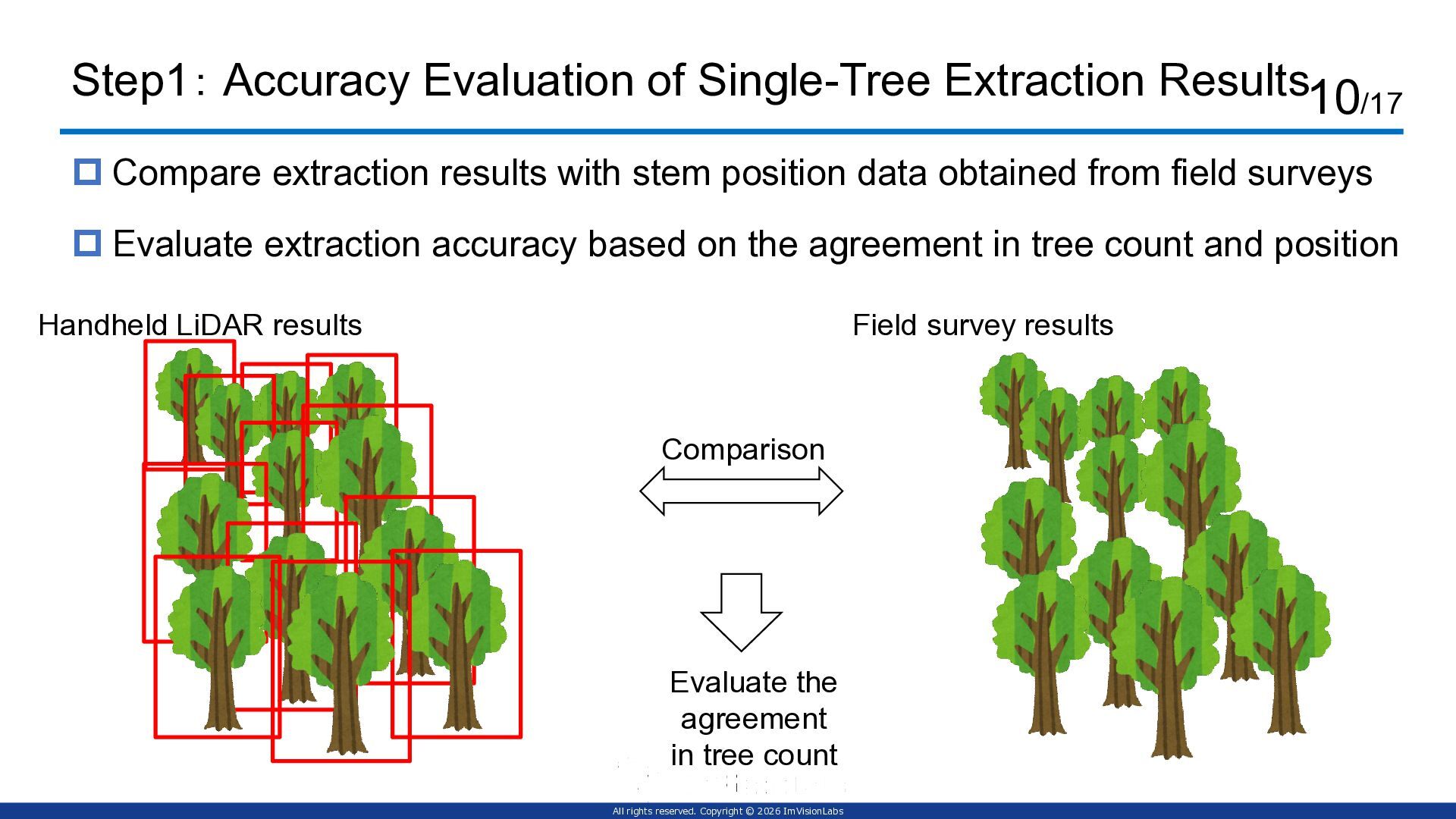
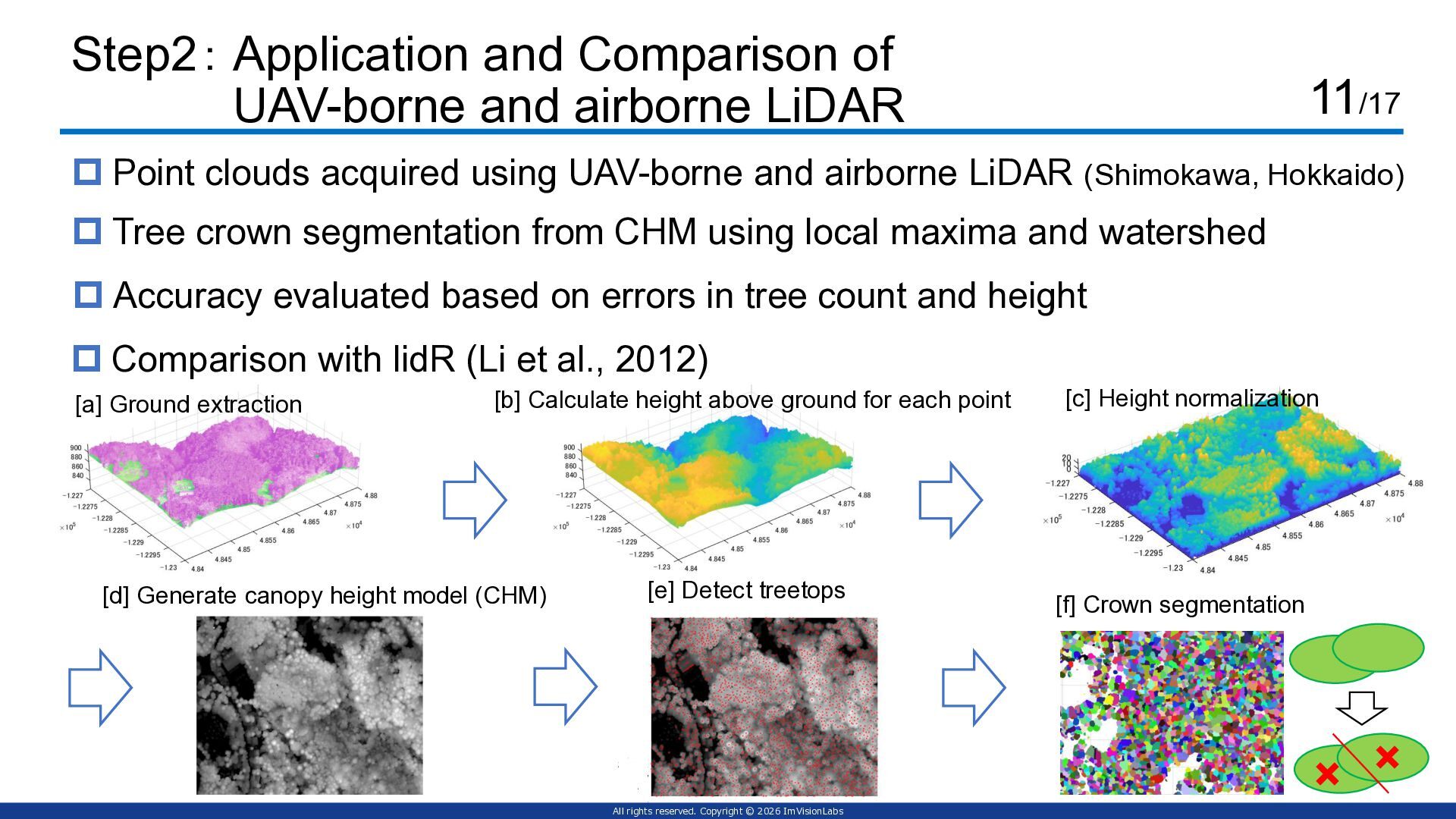
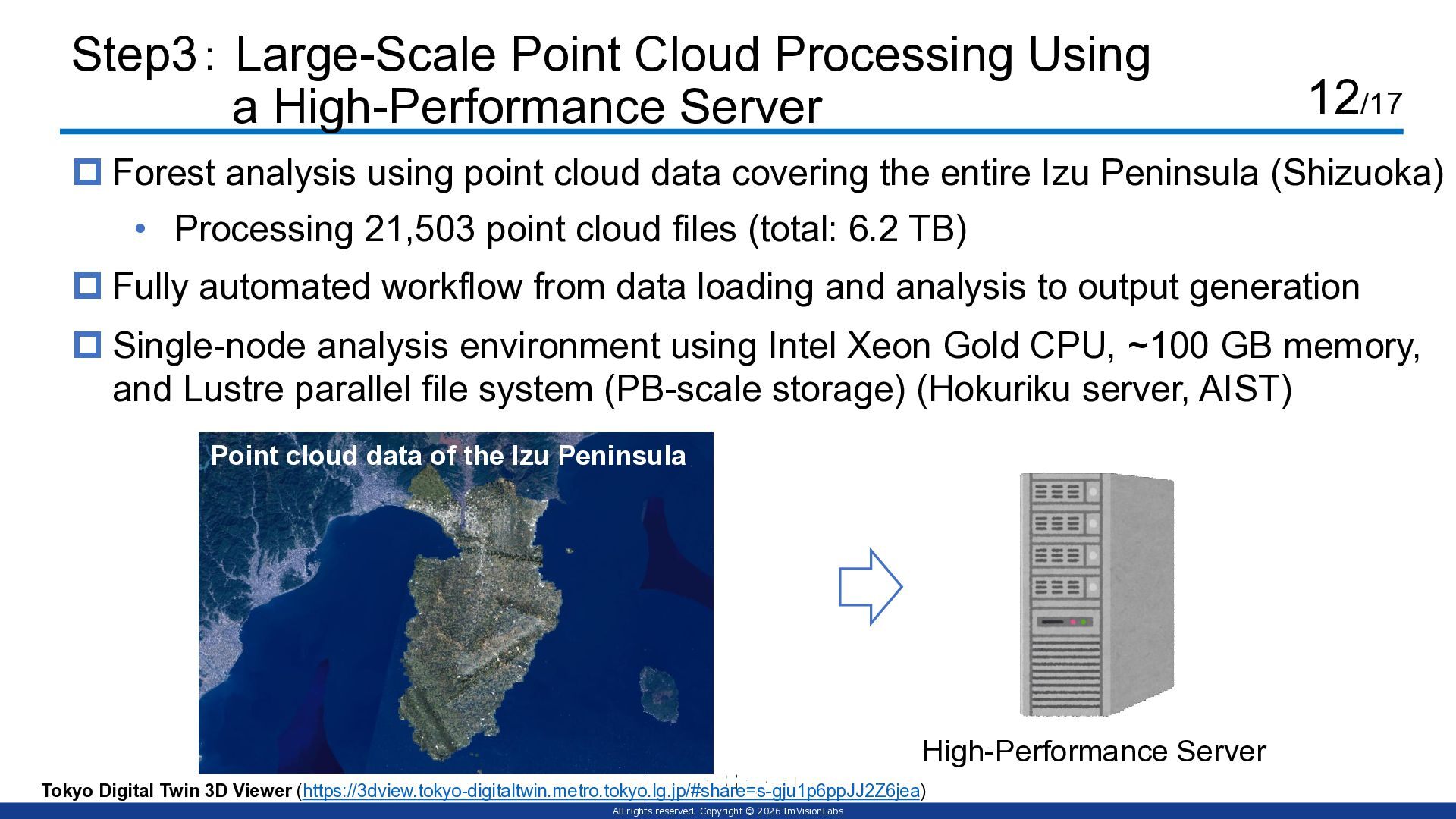
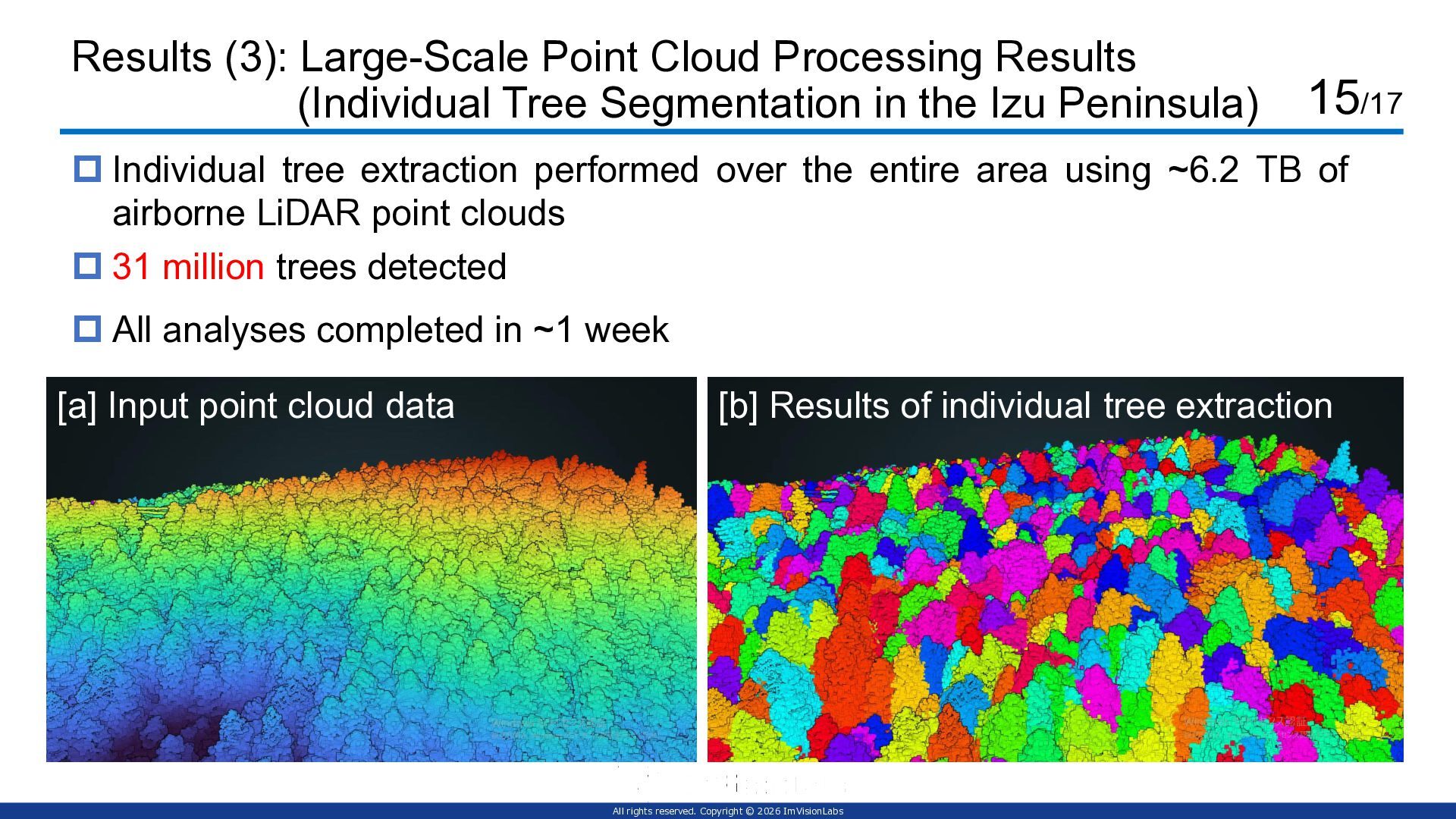
土木学会デジタルシンポジウムにて大規模点群処理の発表をしました。伊豆半島全体を含む6.2TBの 点群 データから樹木の解析を行った事例について発表しました。産業技術総合研究所様、森林総研様、GEOSURF様との取り組みです。
開催日:
2026年6月2日(火) ※参加申込締切日2026年5月27日(水)17時迄
開催場所: 土木学会(東京都新宿区四谷一丁目 外濠公園内),オンライン併用ハイブリッド開催
発表場所:Advances in AI, Data Science and Digital Twin 2026(国際シンポジウムが同時開催されました)
論文
https://jstage.jst.go.jp/article/jsceiiai/7/1/7_134/_article/-char/en
大会ページ
https://committees.jsce.or.jp/struct1002/node/88
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
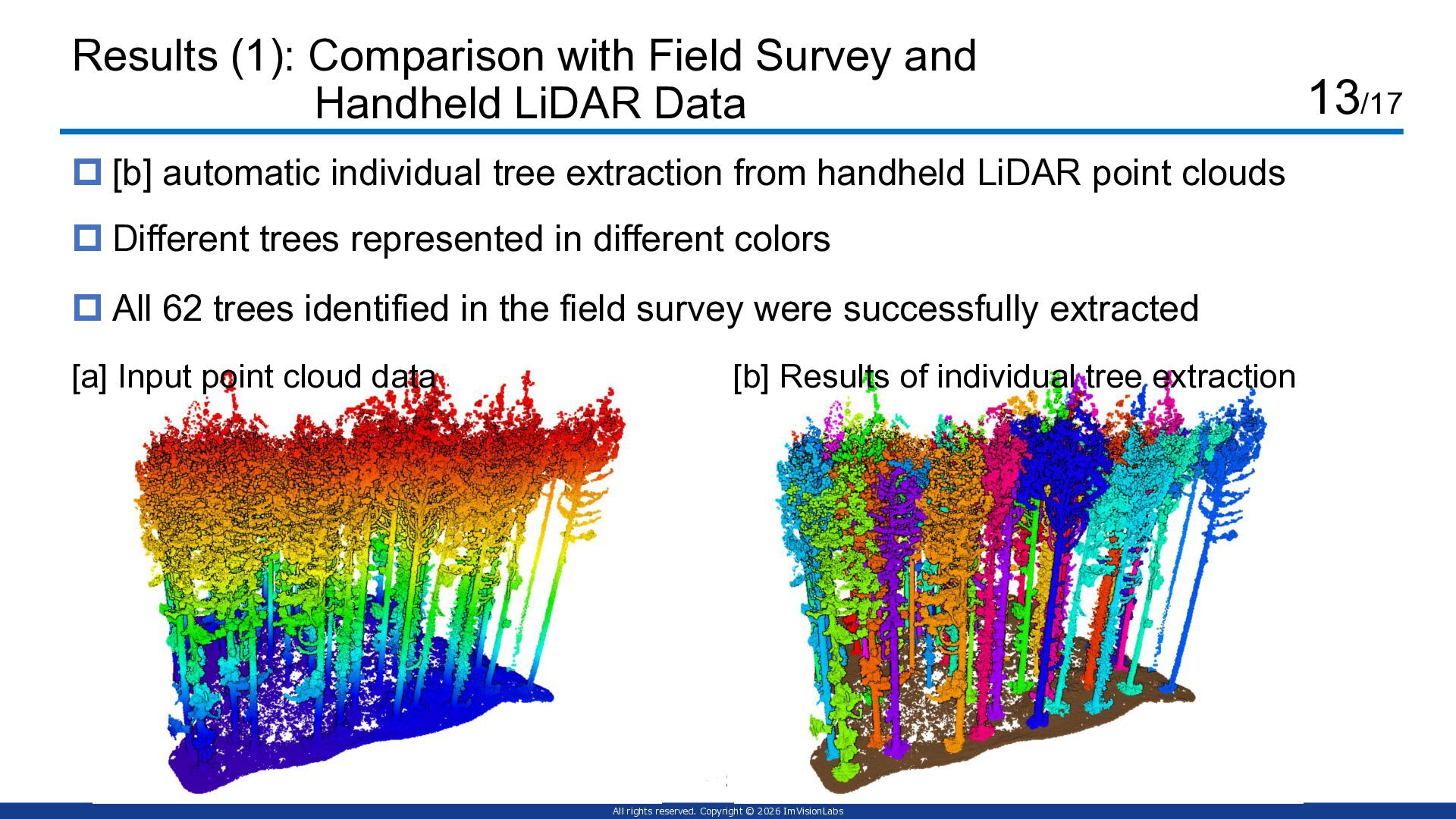
![[a] 入力データ [b] 単木抽出の結果](https://files.speakerdeck.com/presentations/2ba881f7fc1d45919d275a4cf2dc5fcd/slide_18.jpg){kind=link}