S.H., 2006, July. A surface displaced from a manifold. In International Conference on Geometric Modeling and Processing (pp. 677-686). Springer, Berlin, Heidelberg.
ቊ 1 if x is inside the surface 0 if x is outside the surface このような関数を占有関数𝜒 x とすると,概念的には以下のように 定義できる。 しかし、点群は離散的なデータであり、ノイズなども含むため、点が有る空間が 物体の内部であるとは限らず、点が無い空間が物体の外部とは限らない。
{kind=link}
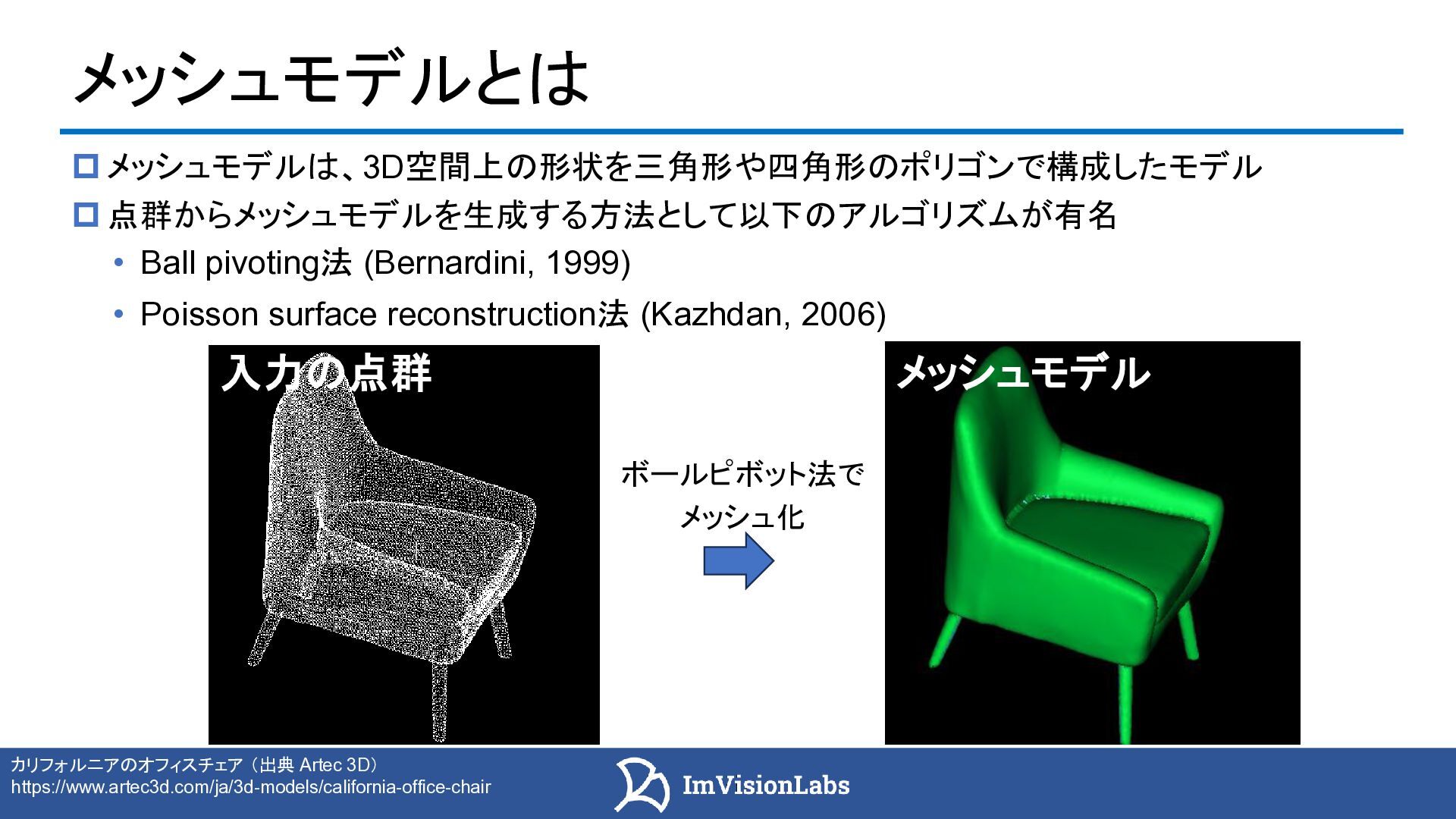
![点群のメッシュ化 1 バックパック型スキャナー iPhone12 LiDAR 3次元点群をメッシュモデルに変換する技術について紹介します [動画] ここでは、三角形の集まりで3次元形状を表現することをメッシュ化と呼びます Reference: Yoon,](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_1.jpg){kind=link}
![点群のメッシュ化 2 バックパック型スキャナー iPhone12 LiDAR 3次元点群をメッシュモデルに変換する技術について紹介します [動画] ここでは、三角形の集まりで3次元形状を表現することをメッシュ化と呼びます](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![部材ごとのメッシュ化 7 バックパック型スキャナー iPhone12 LiDAR CloudCompareにて、Wire Frame 機能にてメッシュモデルを表示 [動画] 三角形の集まりでモデルが構成されていることがわかる](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![点群の法線ベクトルを代表するベクトル場をつくる バックパック型スキャナー iPhone12 LiDAR [動画] 以下の式で表されるベクトル場V(x)は、周囲の点群の法線ベクトルに 重みを付けたものである。 𝐕 𝐱](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_12.jpg){kind=link}
![点群の法線ベクトルを代表するベクトル場をつくる バックパック型スキャナー iPhone12 LiDAR [動画] 影響関数𝜓 x の値は一般に点 x𝑖](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_13.jpg){kind=link}
![点群の法線ベクトルを代表するベクトル場をつくる バックパック型スキャナー iPhone12 LiDAR [動画] すなわち、 V x はxの周囲の点群の法線ベクトルの重み付き和となる](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_14.jpg){kind=link}
![点群の法線ベクトルを代表するベクトル場をつくる バックパック型スキャナー iPhone12 LiDAR [動画] このベクトルの変化が大きい場所は、法線の向きや量が急に変わる場所で あり、面の境界である可能性が高い。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_15.jpg){kind=link}
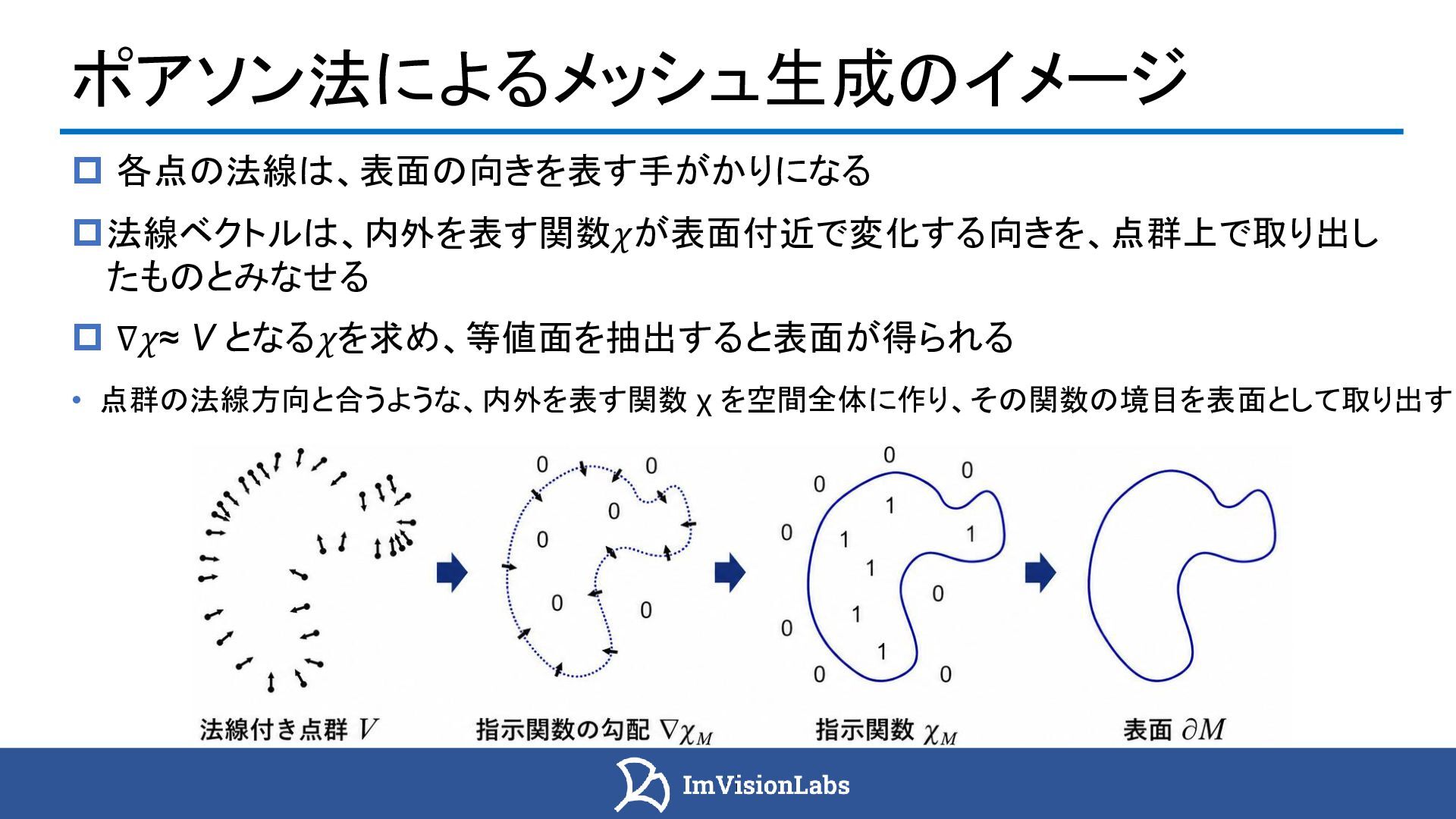
![物体の内外を決定する占有関数を作る iPhone12 LiDAR [動画] 点群から表面を再構成するにあたり,まず空間中の各点が物体の内部に 属するか外部に属するかを表す理想的な関数を考える。 𝜒 x =](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_16.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] 点群は離散的かつノイズを含むため、理想的な0/1の占有関数を直接決める のは難しい](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_17.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] そこでポアソン法では,物体の内外を表す占有関数を滑らかな関数𝜒 x と して近似し,その中から特定の値をもつ面を物体表面として取り出す。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_18.jpg){kind=link}
{kind=link}
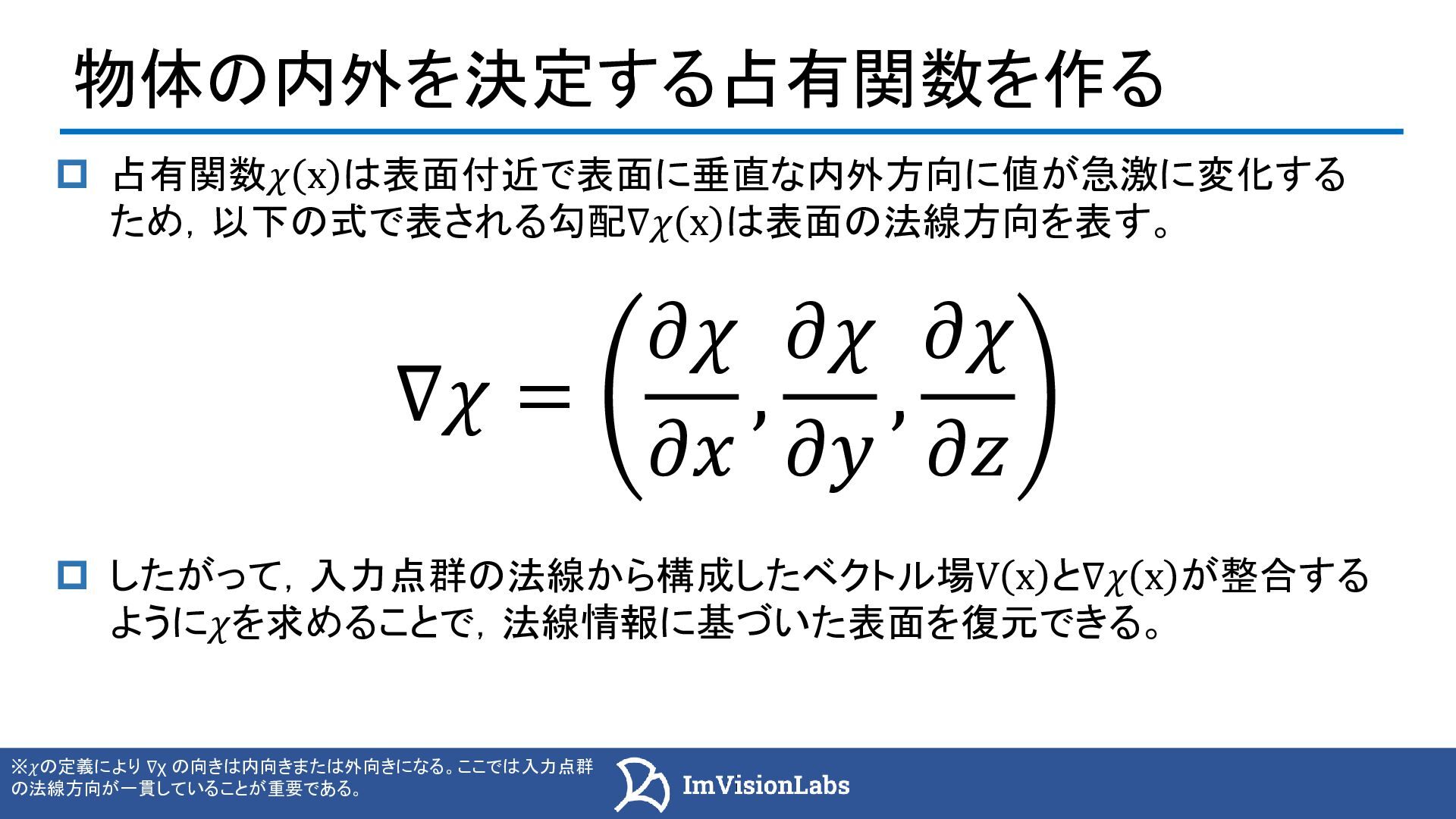
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] そこで、𝜒 x の勾配∇𝜒が法線ベクトルV x](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_20.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] つまり、以下の青色部分でイメージされるΕ 𝜒 の大きさを最小にするような 𝜒を求めたい。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_21.jpg){kind=link}
![物体の内外を決定する占有関数を作る iPhone12 LiDAR [動画] 任意の微小の実数𝜀と、𝜕Ω上で常に0となるような任意の関数𝜙 x を定義する。 𝜙](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_22.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] 先ほど定義した𝜀と𝜙 x を用いて、以下の様に𝜒 x](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_23.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] これをΕ 𝜒 の定義の式に代入すると以下のようになる。 ](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_24.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] これを𝜀で微分することで、以下のようになる。 ここで、 Ε](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_25.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] つまり、以下の図のような形となる。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_26.jpg){kind=link}
![物体の内外を決定する占有関数を作る iPhone12 LiDAR [動画] ここで、Ε 𝜒 が最小値を取るとき、 Ε 𝜒](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_27.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] ここで、積の微分公式は以下のようになる。 これを多次元に拡張すると、次の式が成り立つ。 𝑢𝑣](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_28.jpg){kind=link}
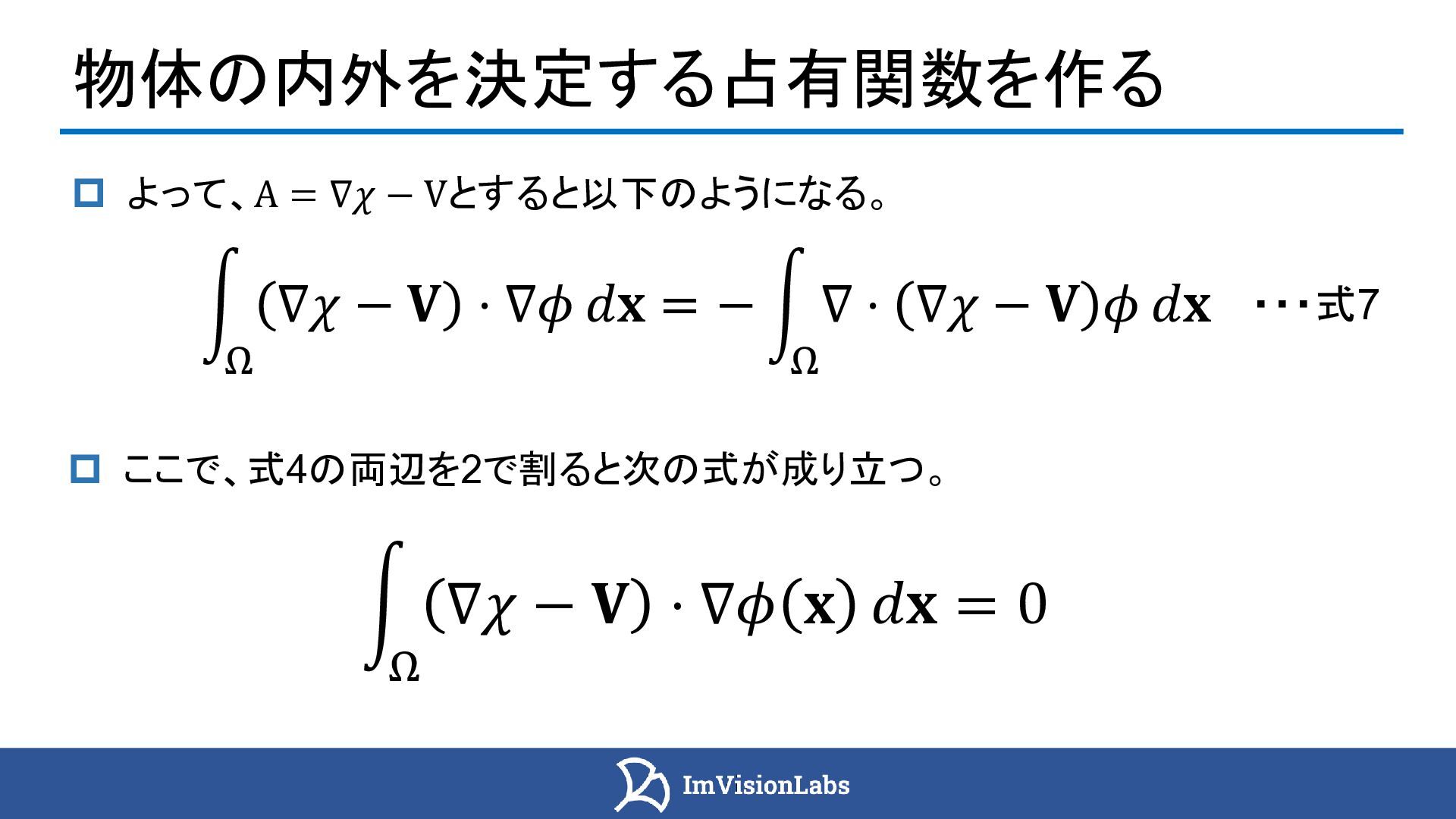
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] 移項すると以下のようになる。 න Ω 𝐀](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_29.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] 発散定理より、領域Ω内におけるベクトル場𝜙Αの発散の体積積分は、 その境界𝜕Ωを通過する外向き流束の面積積分に等しい。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_30.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー iPhone12 LiDAR [動画] よって、境界面に垂直な向きで領域の外側を向くような単位ベクトルnを 用いて、以下の式が成り立つ。 これを、式5に代入して、次のようになる。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_31.jpg){kind=link}
![物体の内外を決定する占有関数を作る バックパック型スキャナー [動画] さらに、𝜙は𝜕Ω上で常に0となるように定められており、次の式が成り立つ。 これを式6に代入して以下のようになる。 න 𝜕Ω 𝜙𝐀](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
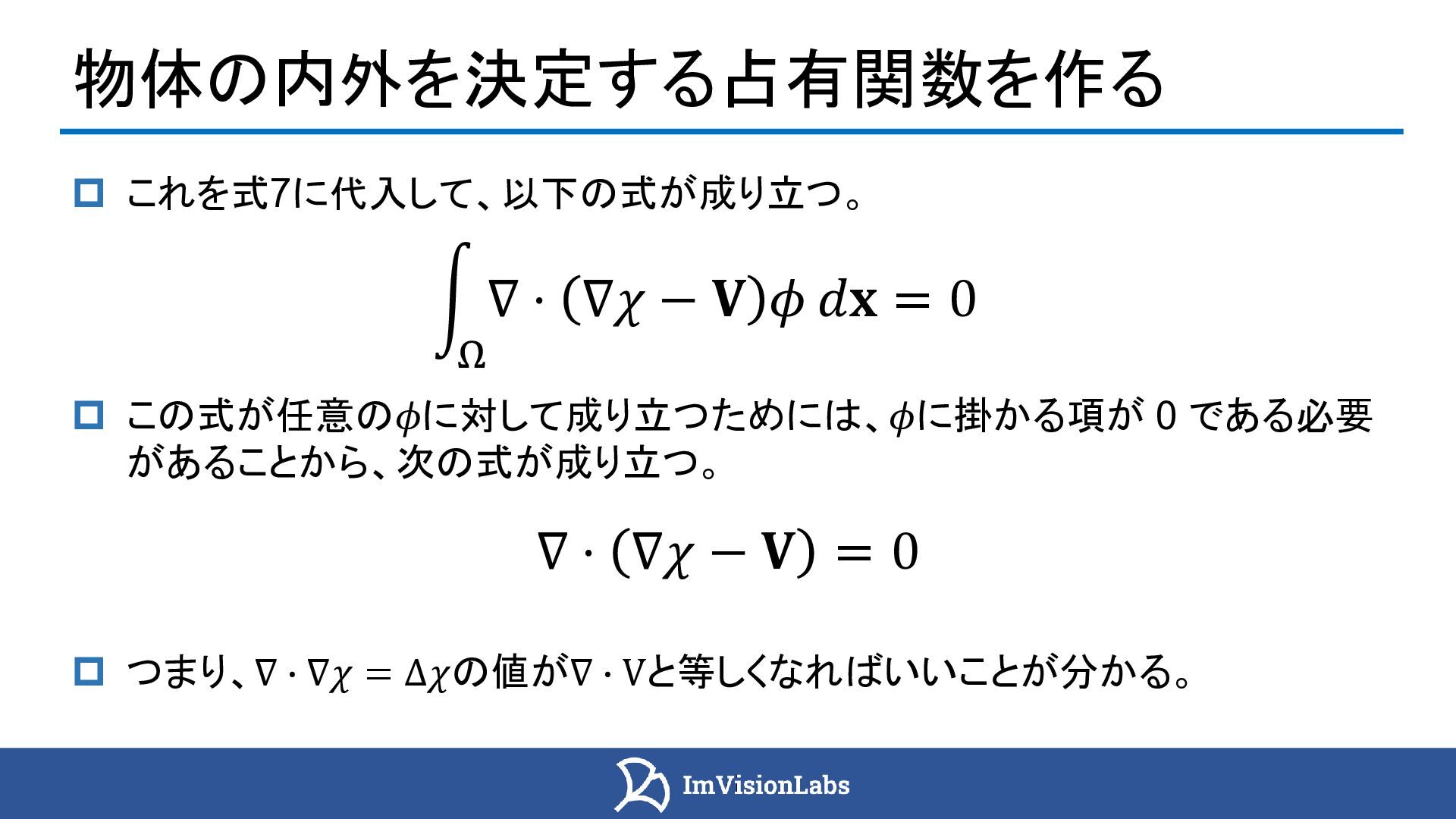
![ポアソン方程式を解いて𝜒の値を推定する バックパック型スキャナー iPhone12 LiDAR [動画] ここで、V(x)の発散∇ ∙ Vは以下の式で表される。 ](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_35.jpg){kind=link}
![バックパック型スキャナー iPhone12 LiDAR [動画] ここで、式1より V(x)は既知なのでその発散∇ ∙ Vは求めることができ、 ポアソン方程式として以下の式を解くことで𝜒を求める。](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_36.jpg){kind=link}
![占有関数𝜒の等値面を決定する バックパック型スキャナー iPhone12 LiDAR [動画] しかし、以下の式で表されるように、𝜒 x に任意の定数を加えてもΔ𝜒は 変化しないため、ポアソン方程式だけでは𝜒](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_37.jpg){kind=link}
![バックパック型スキャナー iPhone12 LiDAR [動画] ここで、点群の密度が大きい点では小さくなり、点群の密度が小さい点では 大きくなるように設定された、点xi に対応する密度wi を用いて、入力点群の𝜒 の値の重み付き平均を以下のො](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_38.jpg){kind=link}
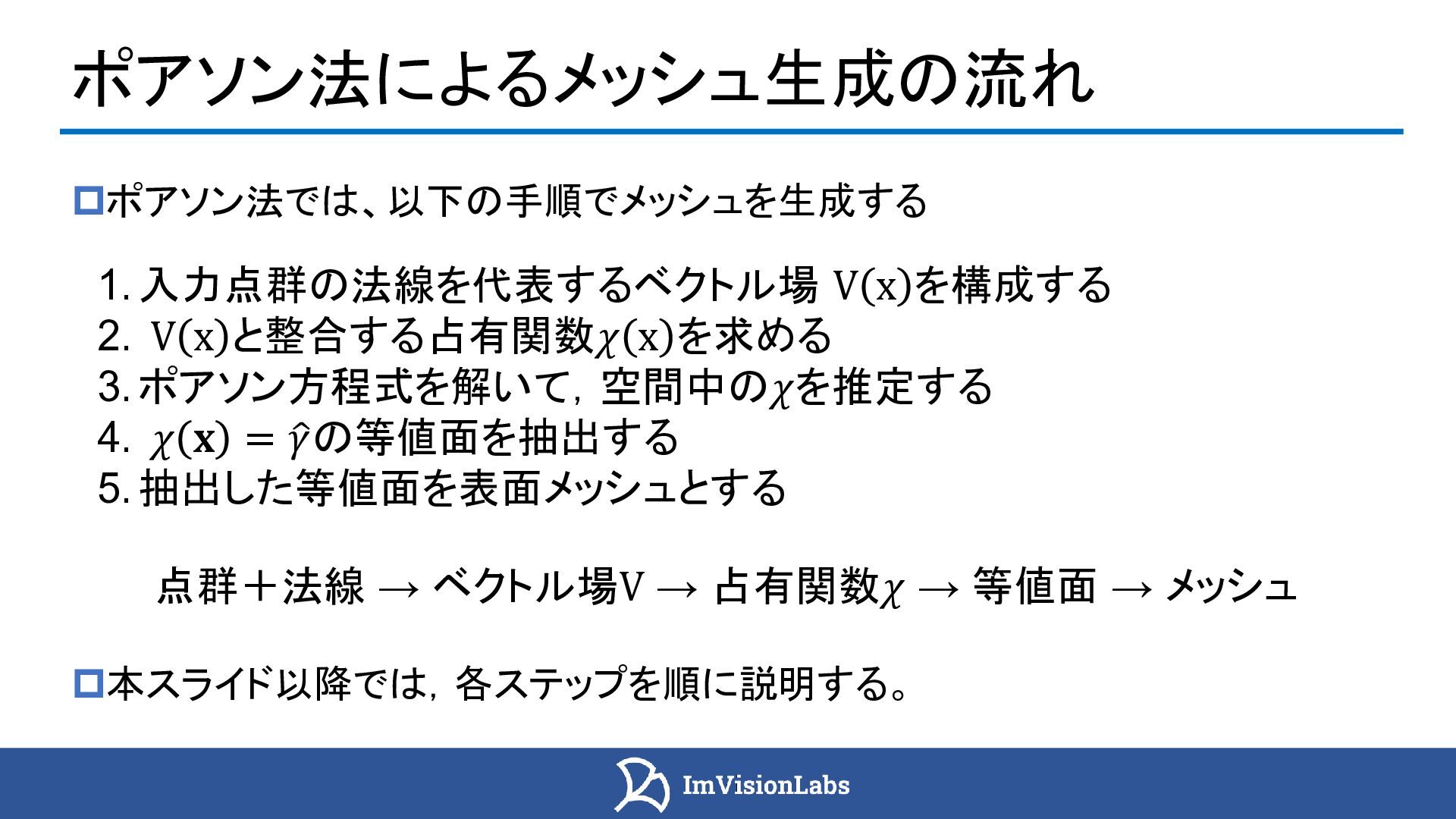
![等値面を物体表面とする バックパック型スキャナー iPhone12 LiDAR [動画] したがって、𝜒 x = ො](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_39.jpg){kind=link}
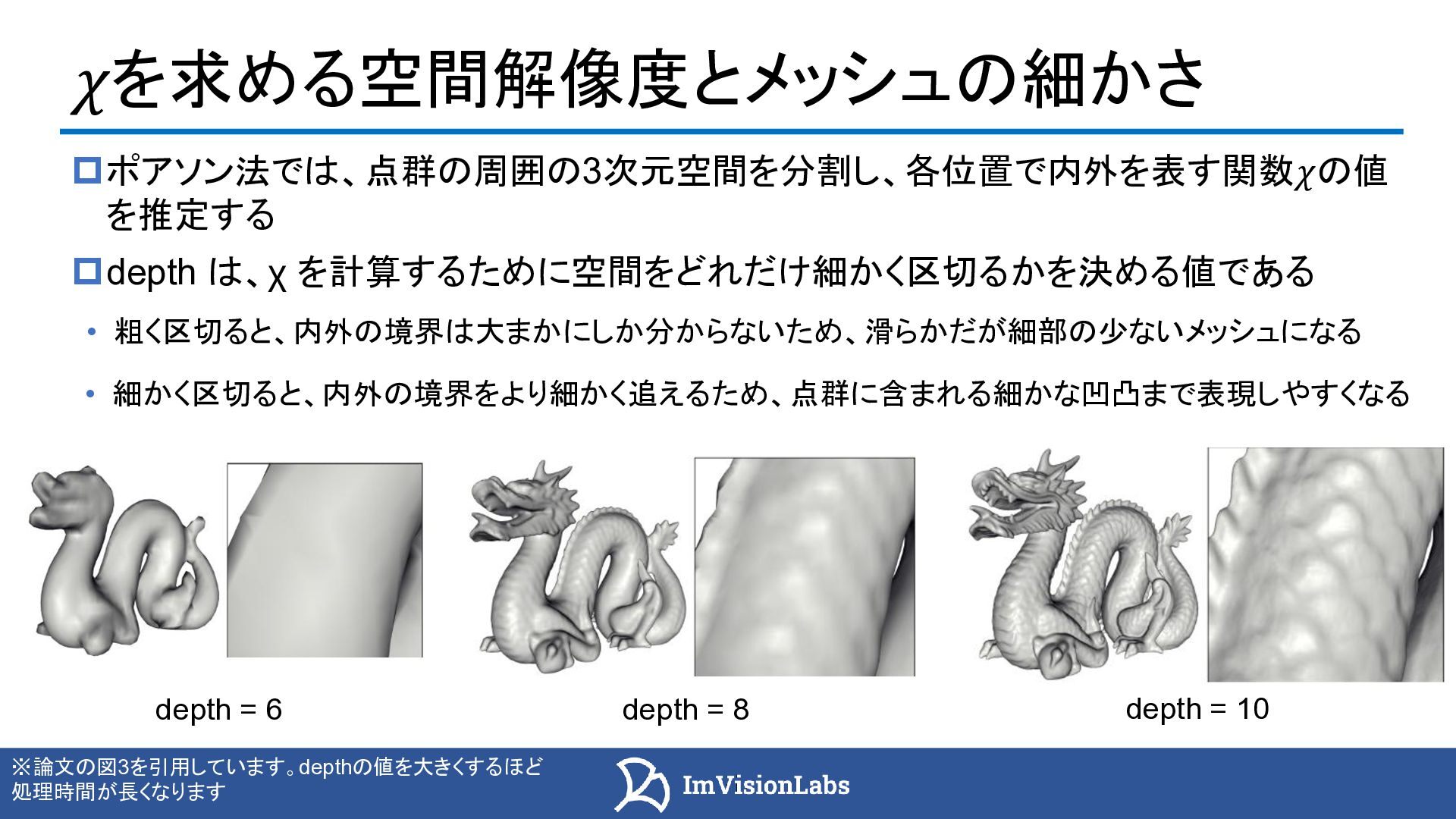
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] ポアソン法では,点群の周囲の空間を細かく分割し,その空間上で 𝜒を計算して表面を復元する。 スライド内の点群は東京都デジタルツイン実現プロジェクトにより公開されている 区部点群データを用いています](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_40.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] 空間分割が粗い場合(depth=3) • 計算速度は速くなる •](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_41.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] 空間分割が細かい場合(depth=9) • 計算速度は遅くなる •](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_42.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] ポアソン法では、点群を囲む計算領域Ωの中で関数𝜒を求め, 表面を復元する。 このとき、点群を囲む計算領域Ωをどれくらいの](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_43.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] 計算領域が小さすぎる場合(scale=0.5) • 点群の一部分が計算領域からはみ出るため、 メッシュ化されない](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_44.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] 計算領域が適切な場合(scale=1.1) • 点群全体よりも少しだけ計算領域が大きい •](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_45.jpg){kind=link}
![ポアソン法を用いた時のメッシュ構築例 バックパック型スキャナー iPhone12 LiDAR [動画] 計算領域が大きすぎる場合(scale=1.5) • 不要な空間まで計算対象となるため、 計算効率が低下する](https://files.speakerdeck.com/presentations/55218363fbb44c7389292d20f417d401/slide_46.jpg){kind=link}