本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、
より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。
speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
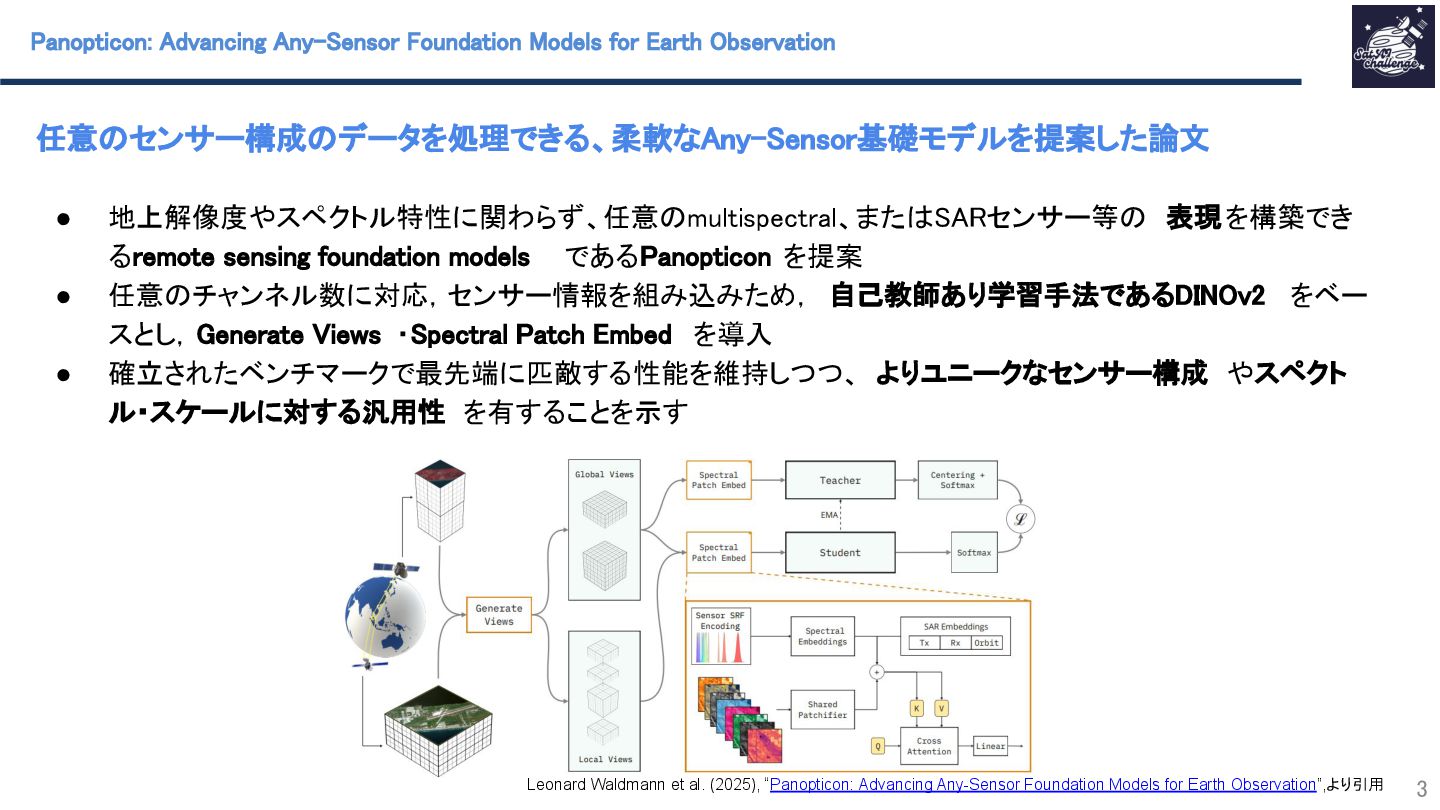
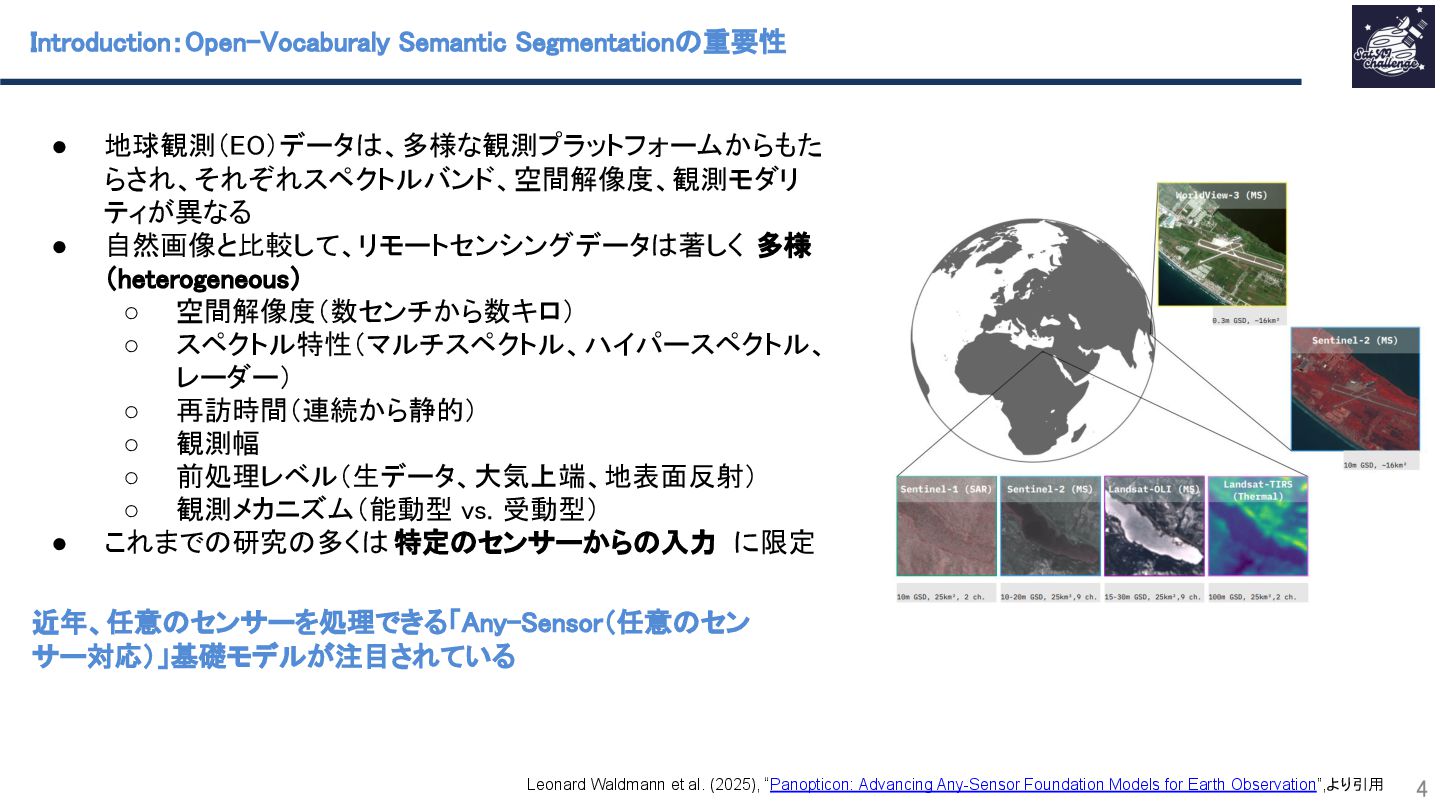
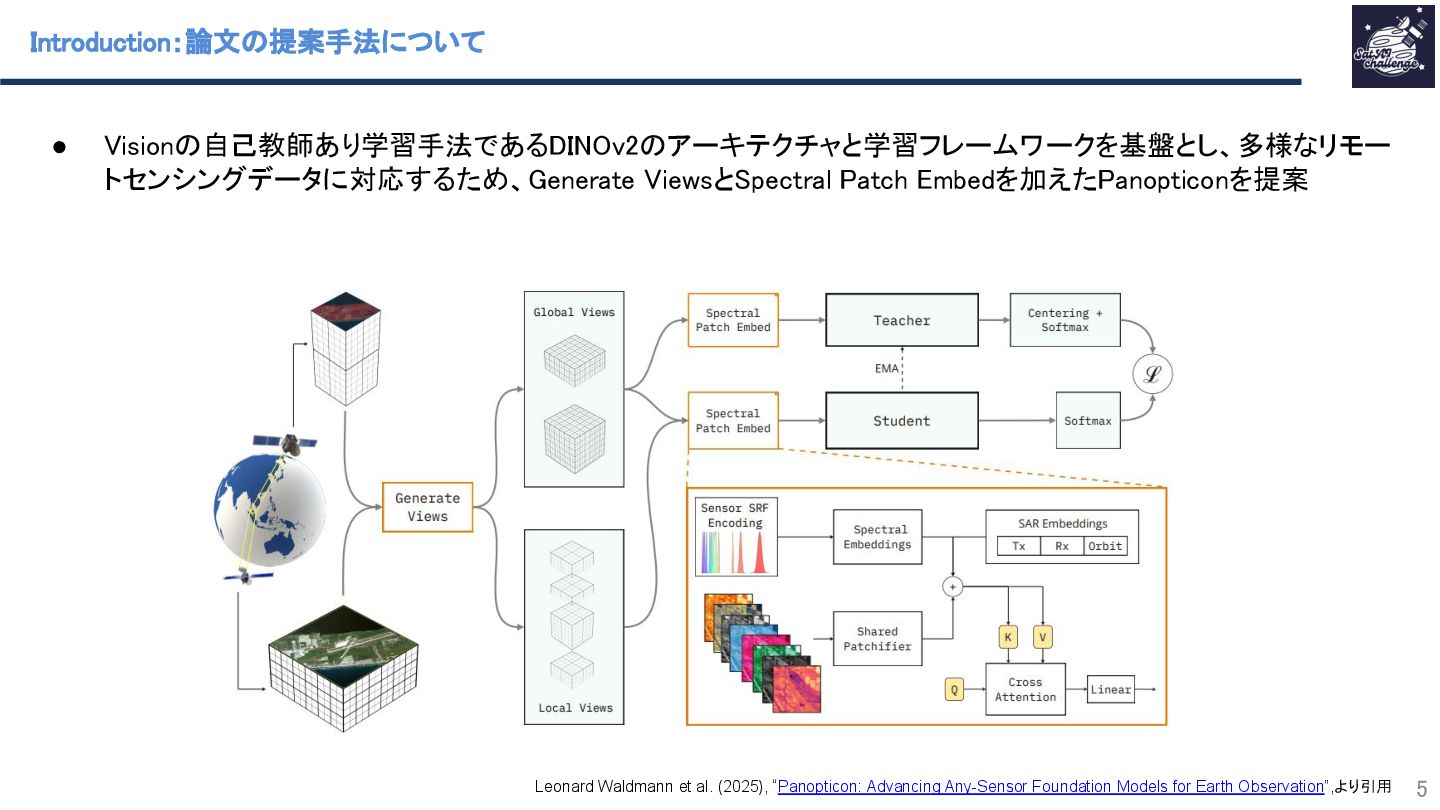
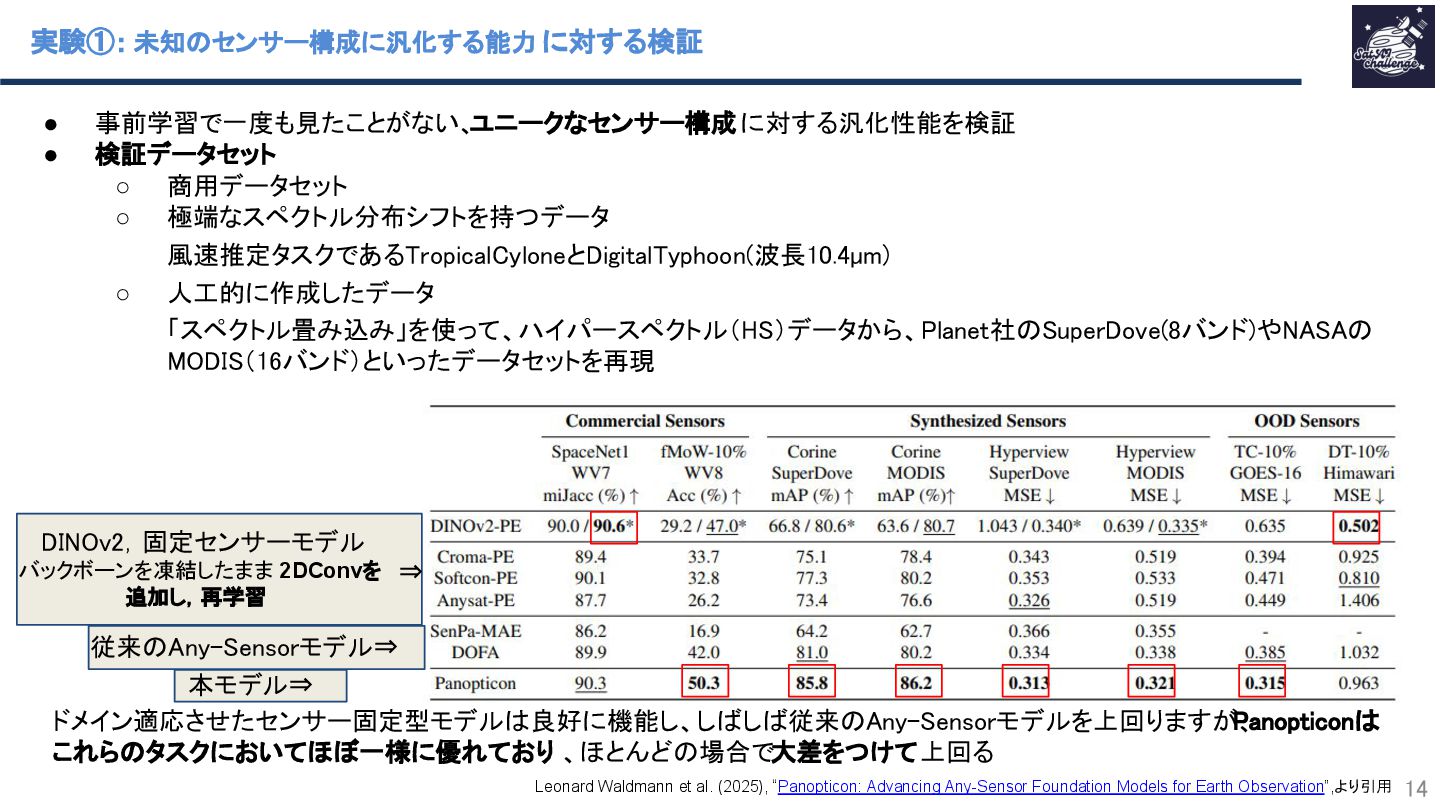
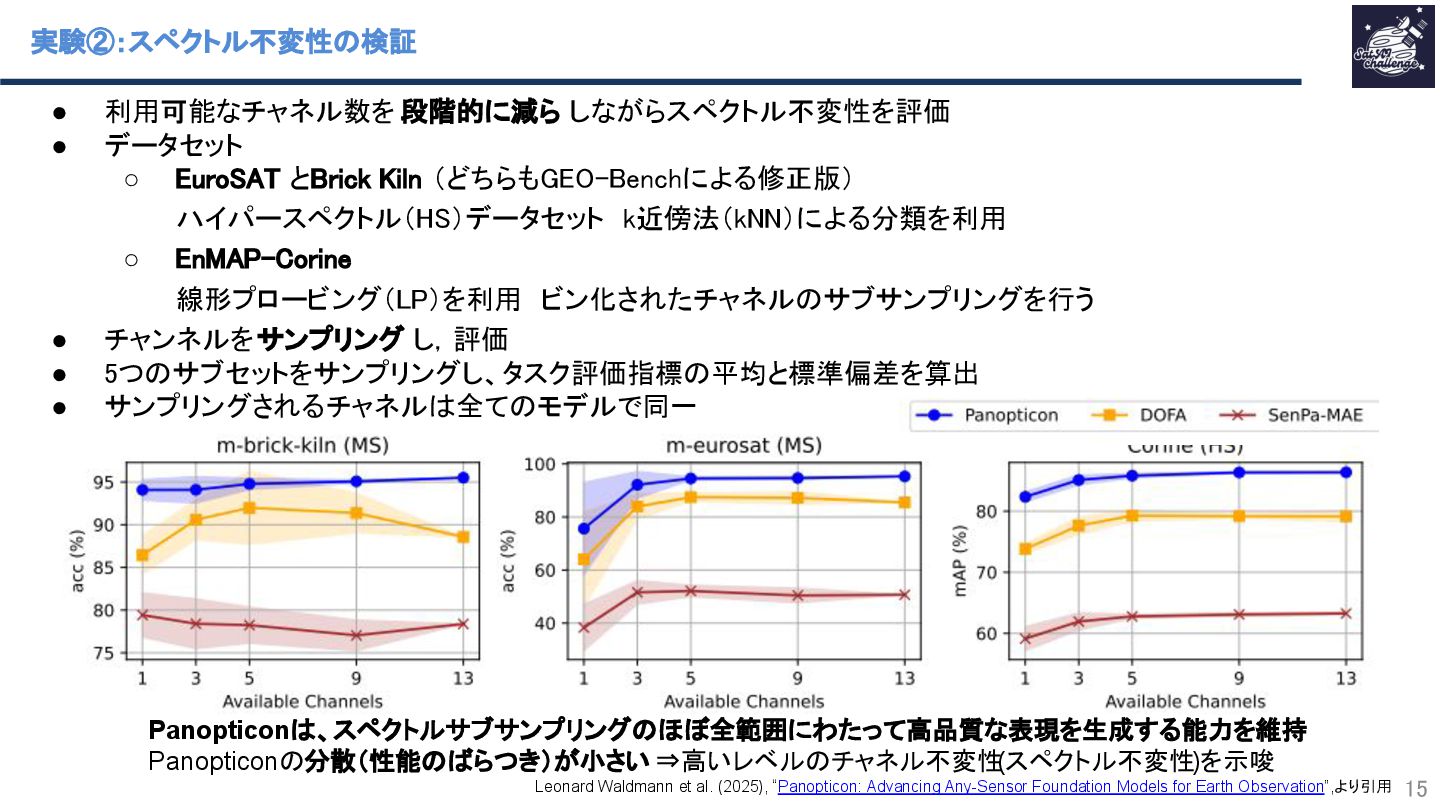
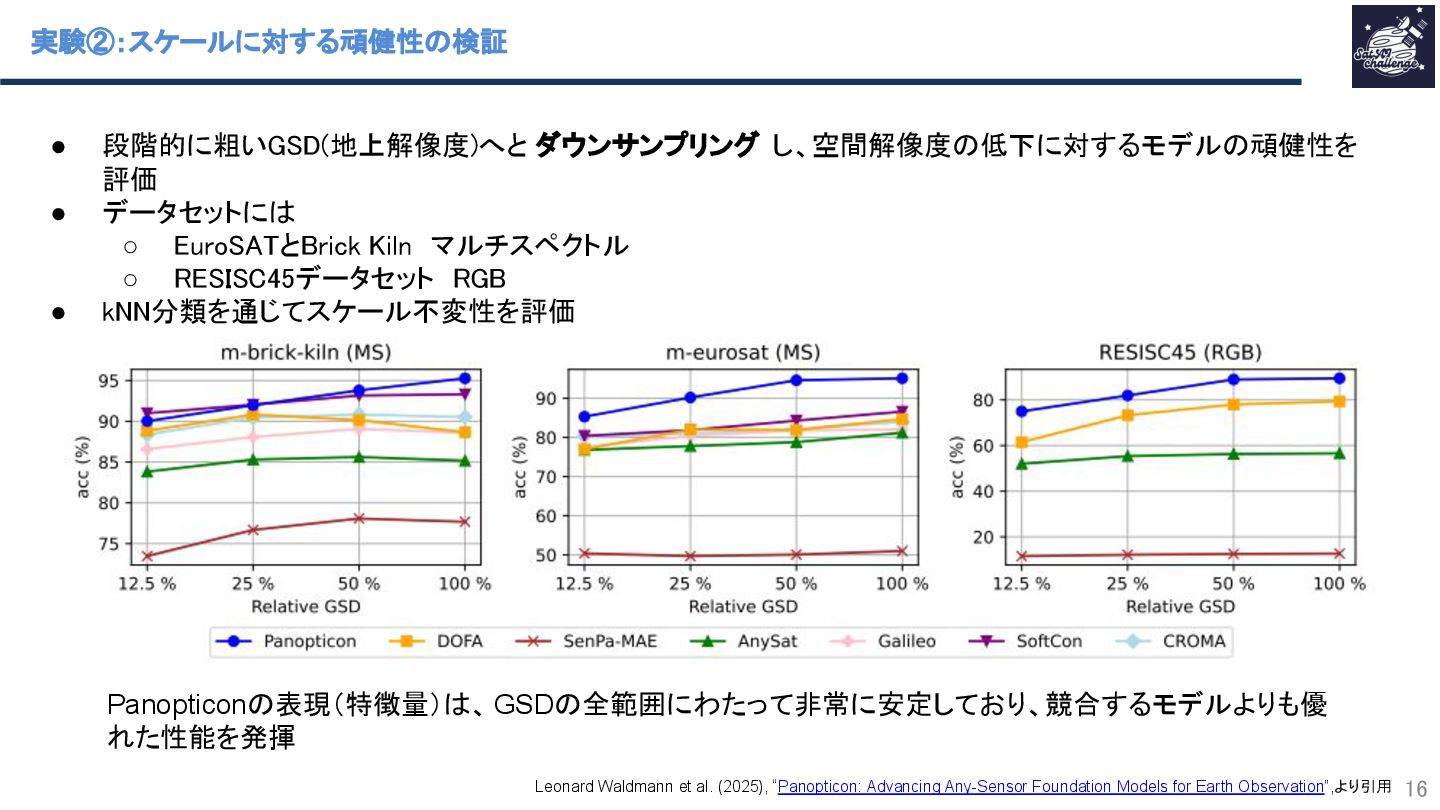
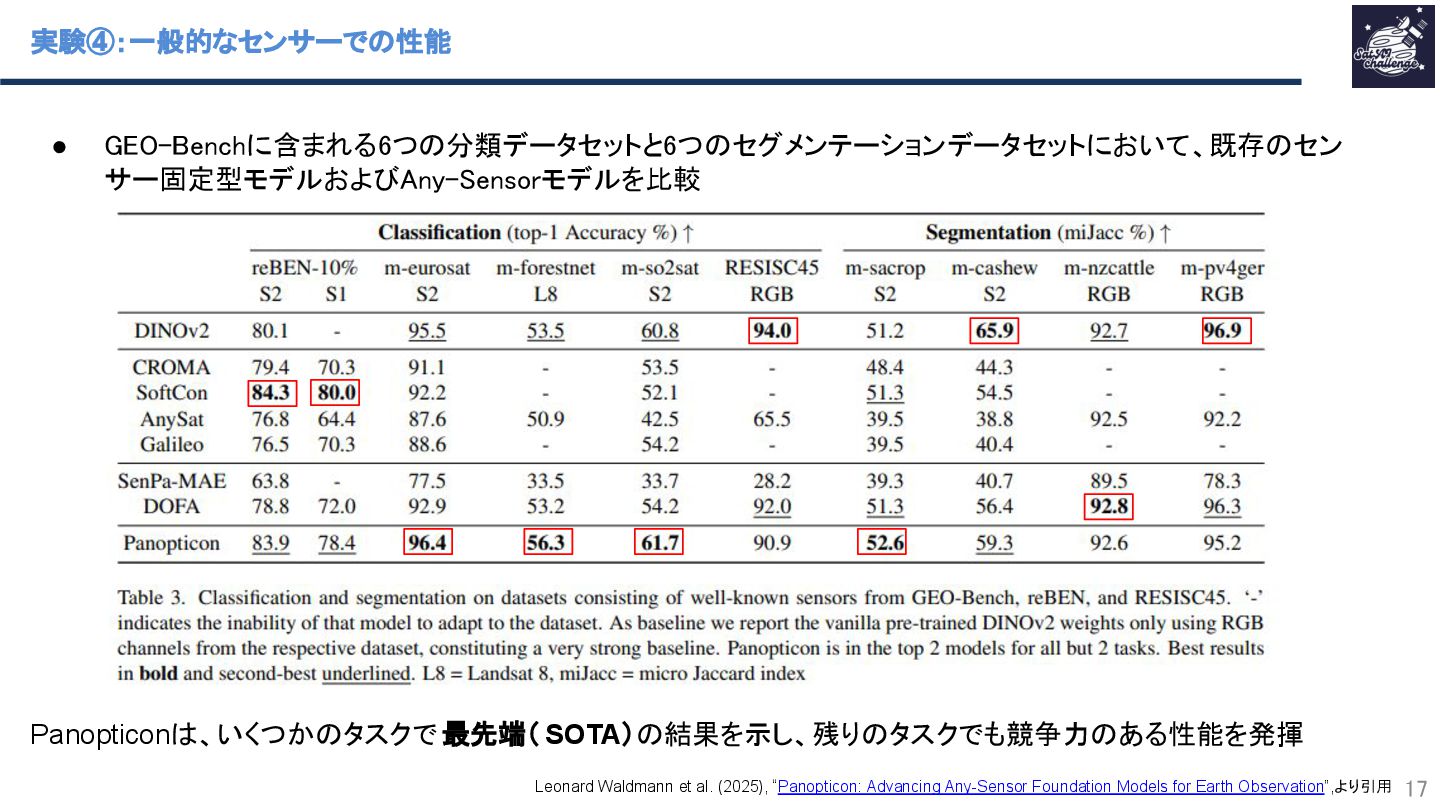
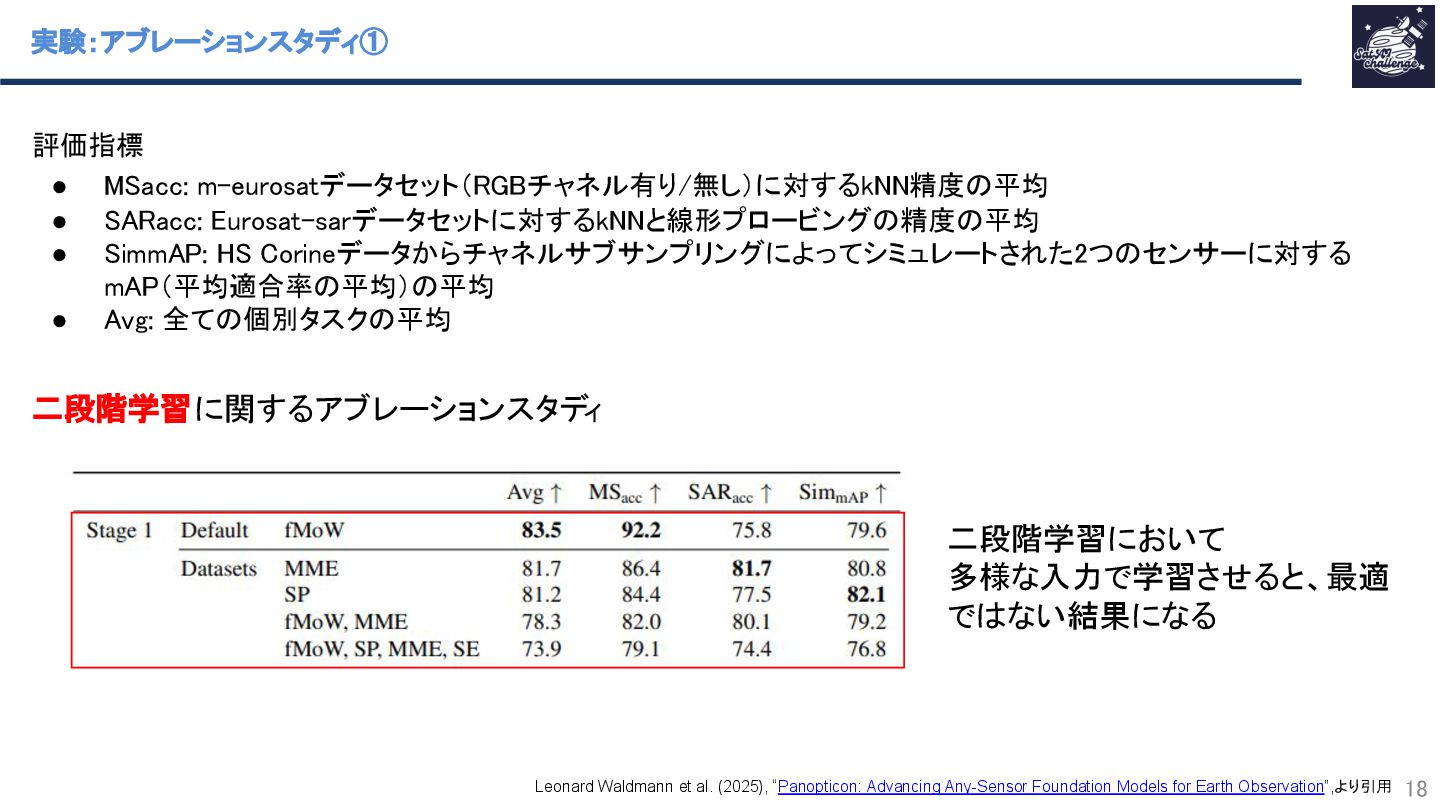
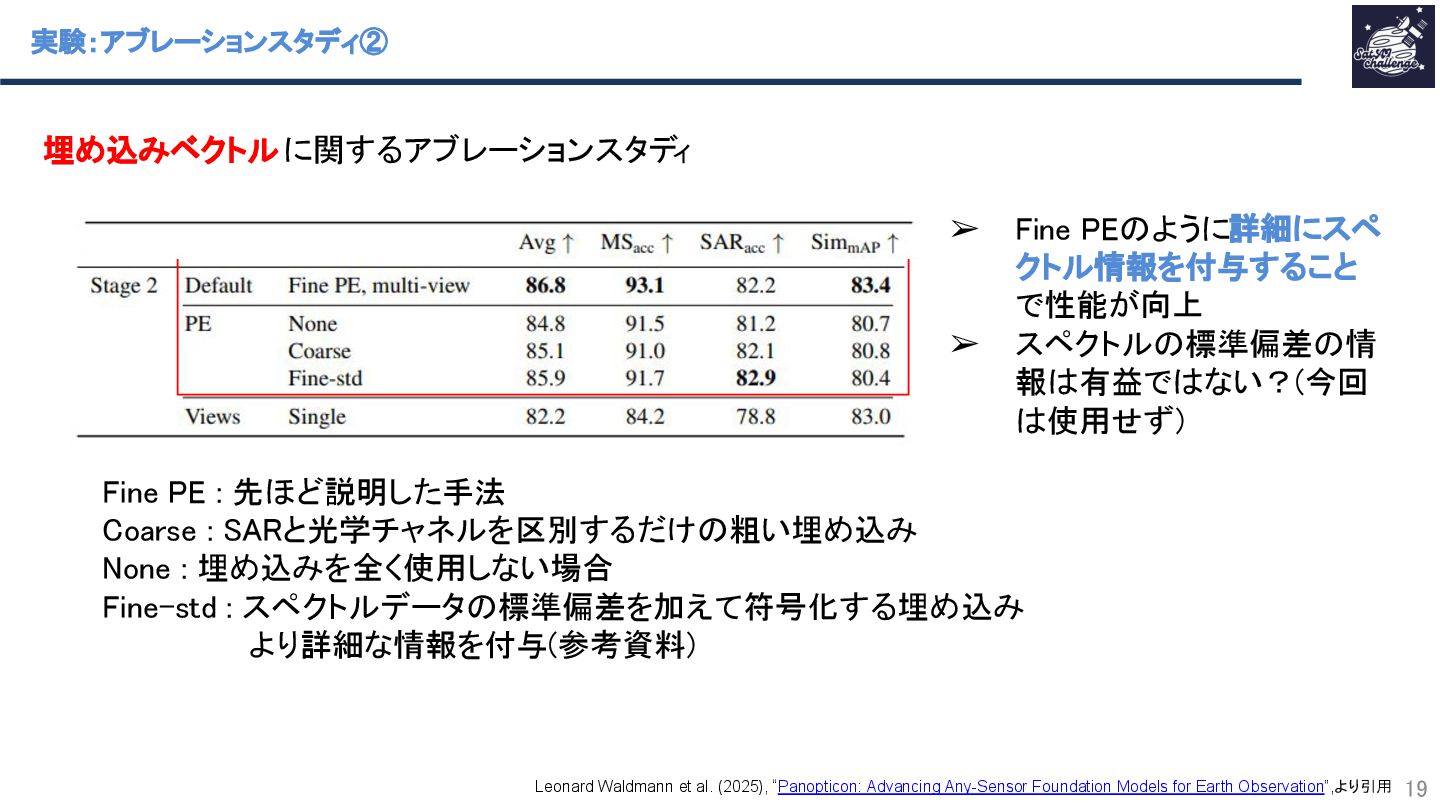
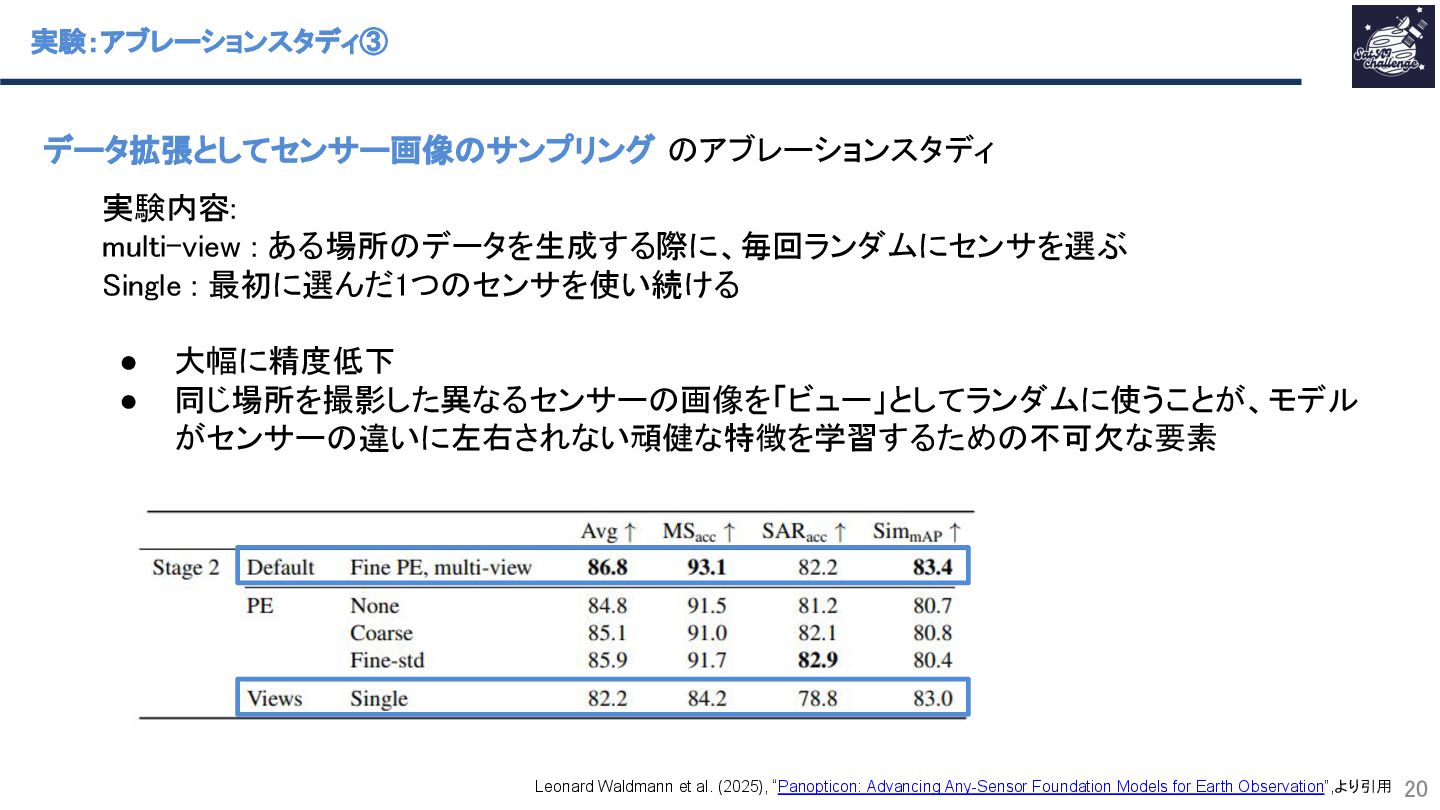
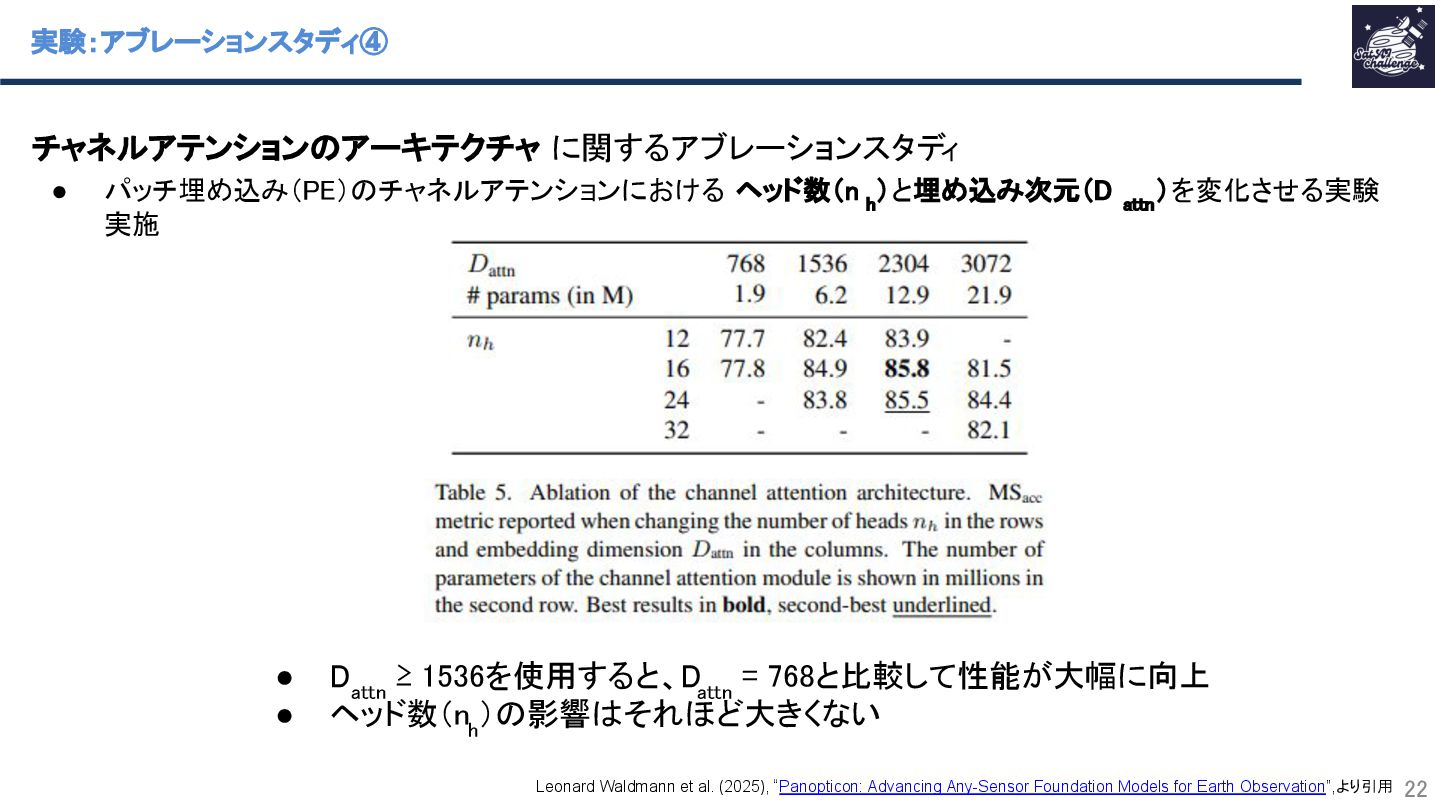
紹介する論文は、「Panopticon: Advancing Any-Sensor Foundation Models for Earth Observation」です。
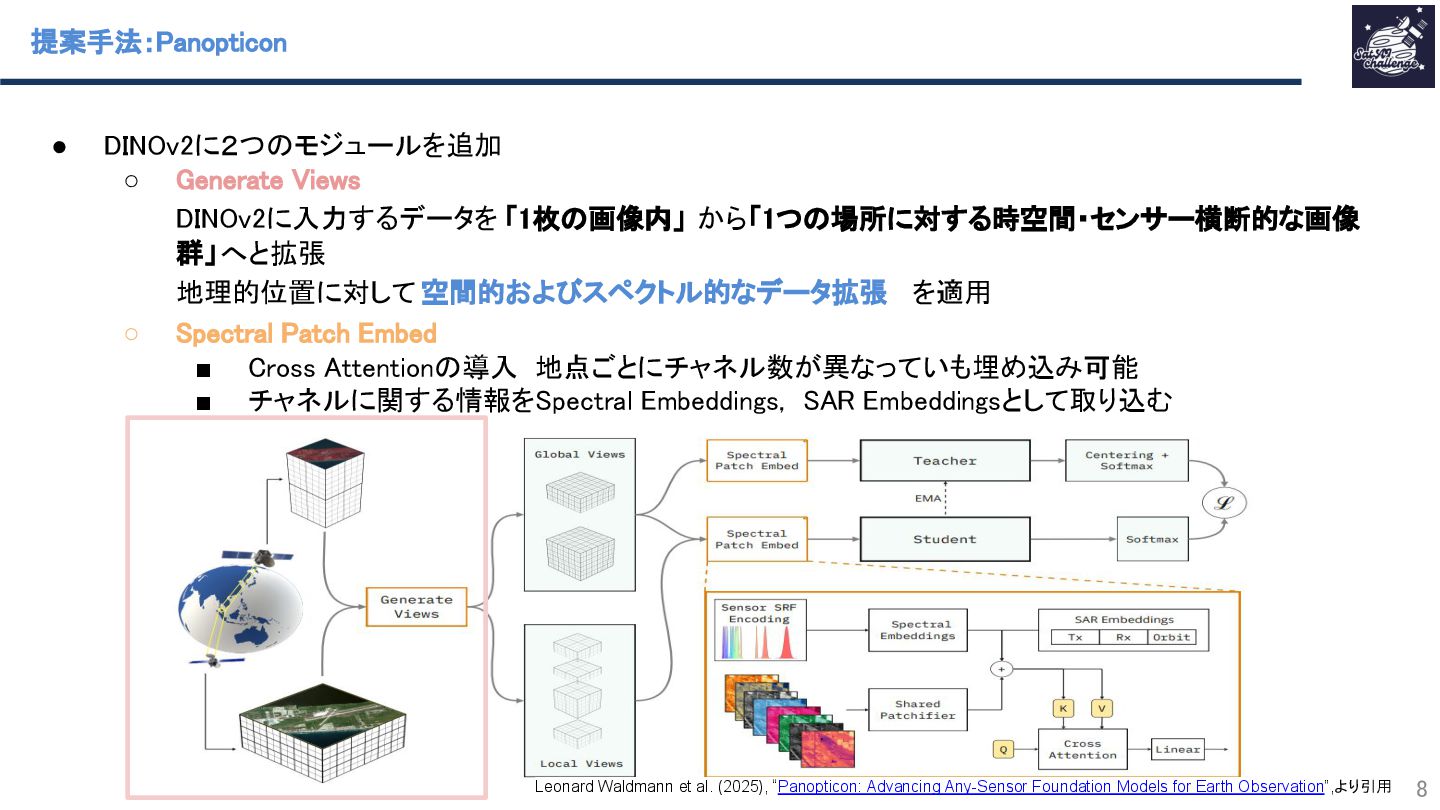
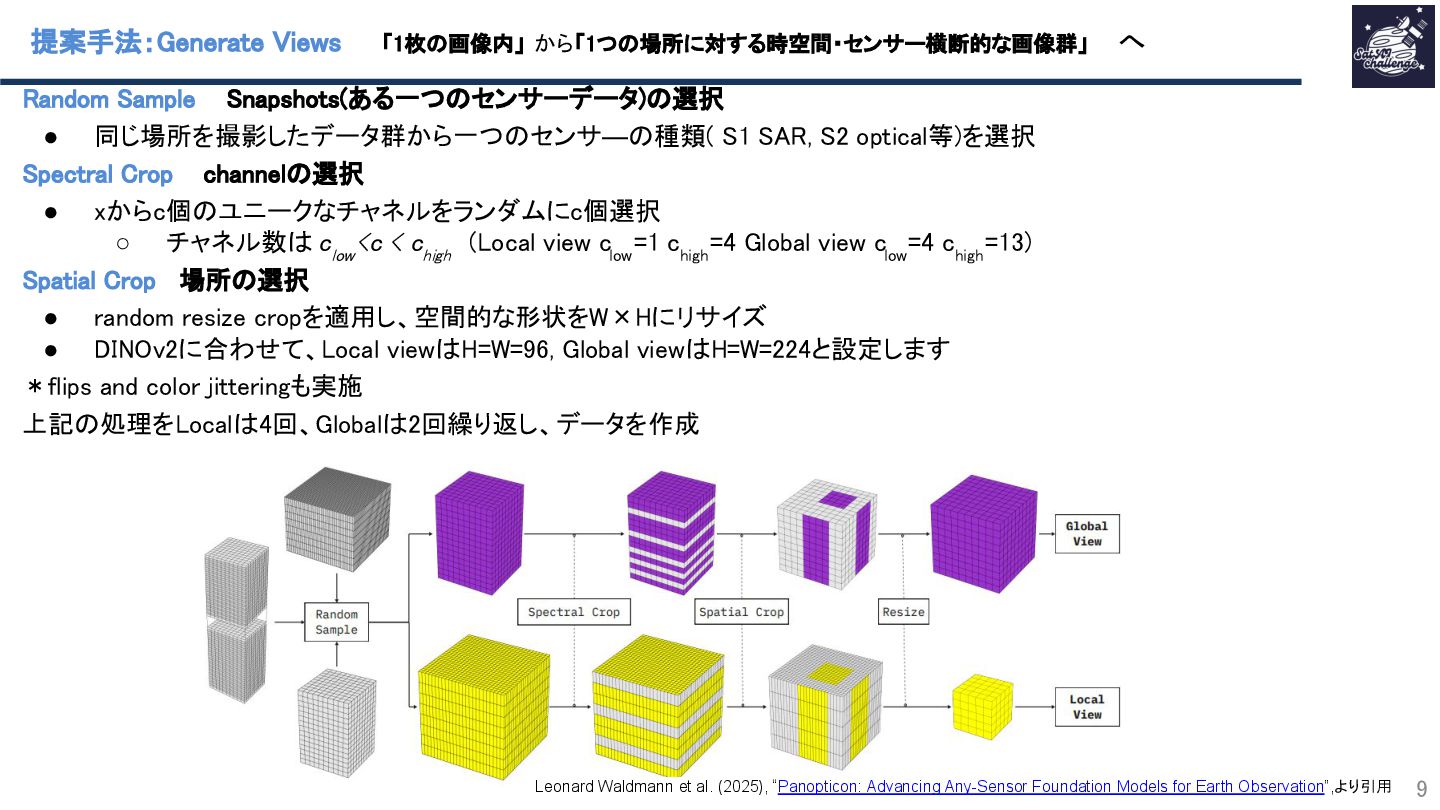
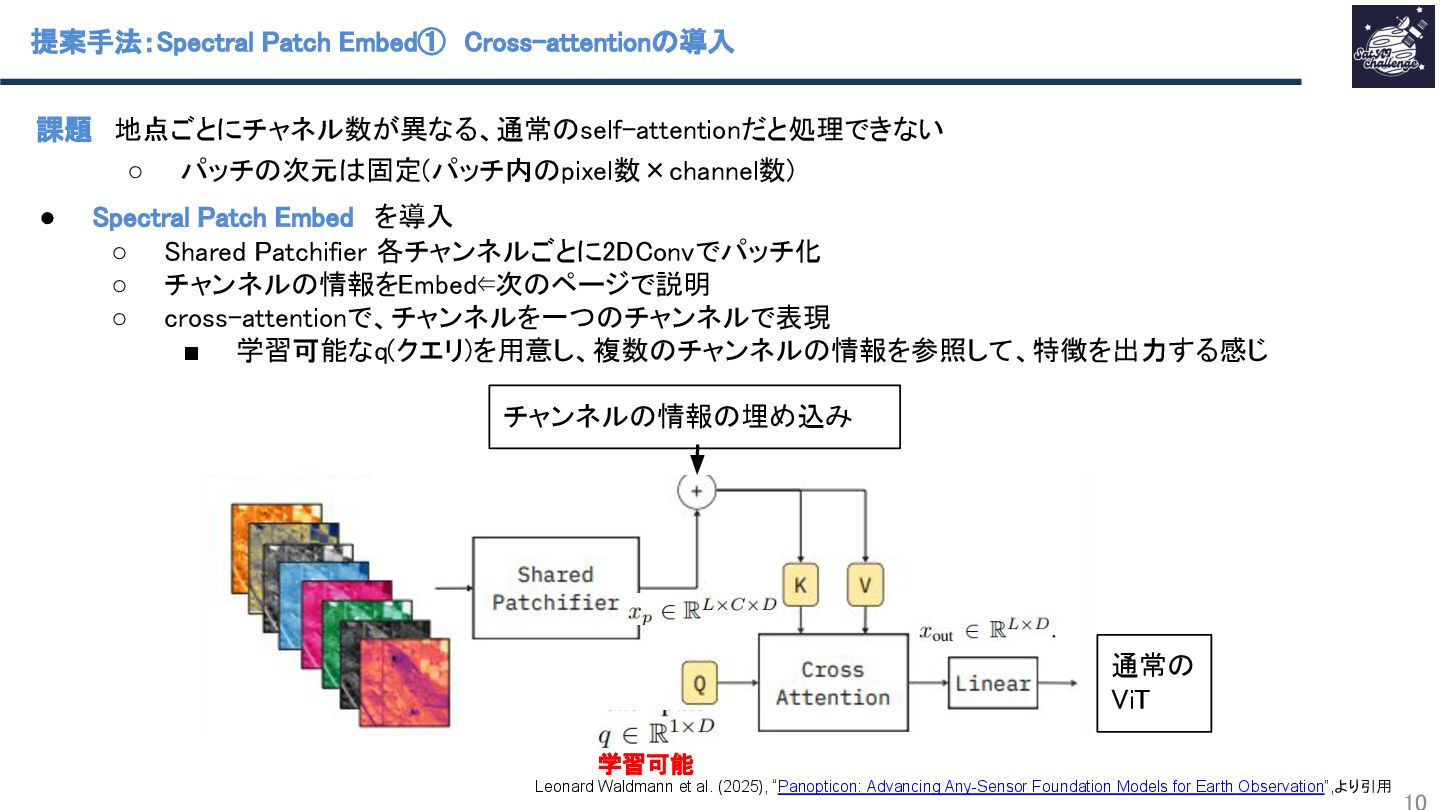
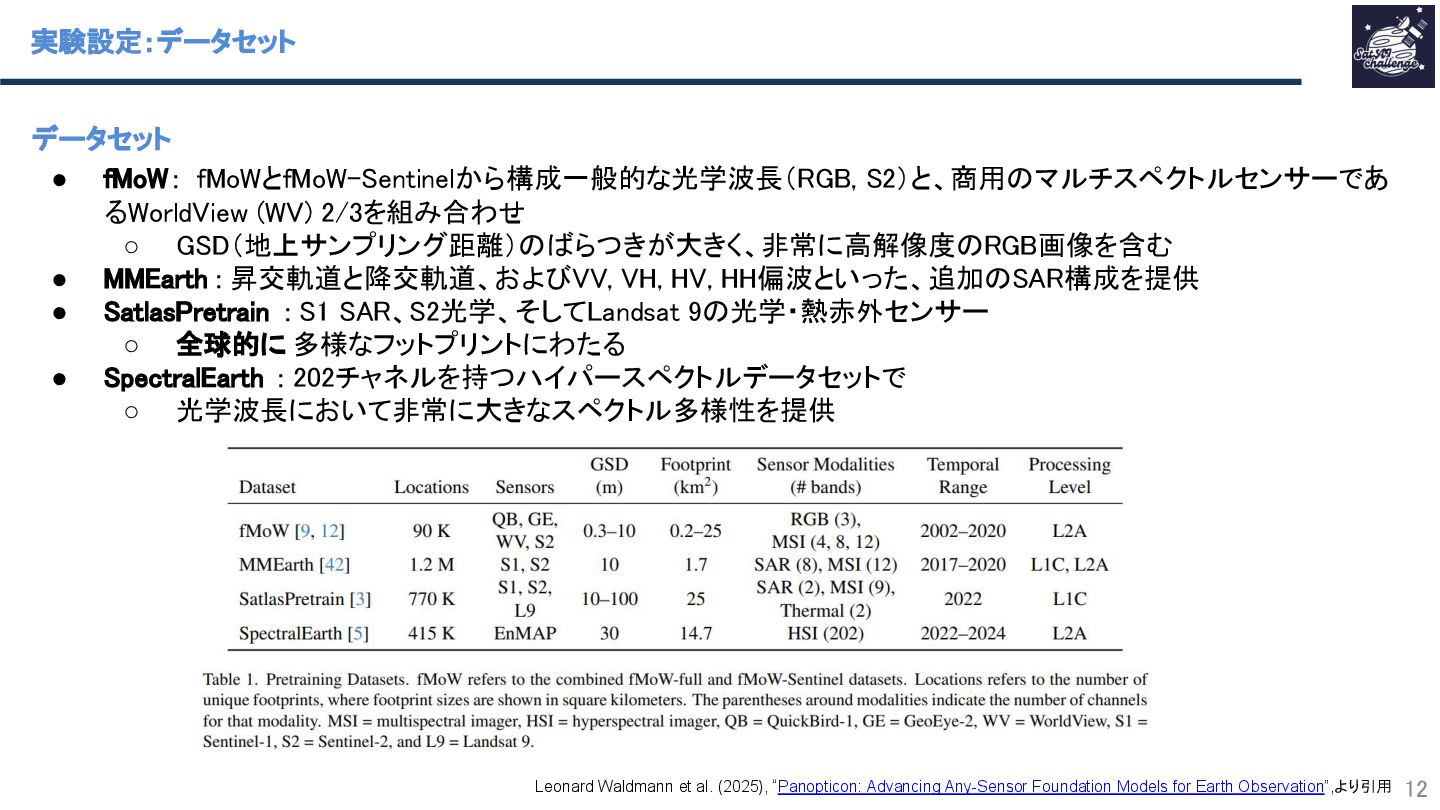
この研究は、任意のセンサー構成のデータを処理できる柔軟なAny-Sensor基盤モデルであるPanopticonを提案しています。Panopticonは自己教師あり手法のDINOv2をベースに,入力するデータを「1枚の画像内」から「1つの場所に対する時空間・センサー横断的な画像群」へと拡張した新たなワークフレームを用いています。ベンチマークで最先端に匹敵する性能を維持しつつ、よりユニークなセンサー構成やスペクトル・スケールに対する汎用性を有することを示しています。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Spectral Embeddings 対象:光学センサ • センサーのチャネルが持つスペクトル情報を、その中心波長 λ [nm]を用いて埋め込みを作成 位置埋め込みと同じ 、位置が波長になっている](https://files.speakerdeck.com/presentations/034735aa956c4bf2b275dcedcb6e198e/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}