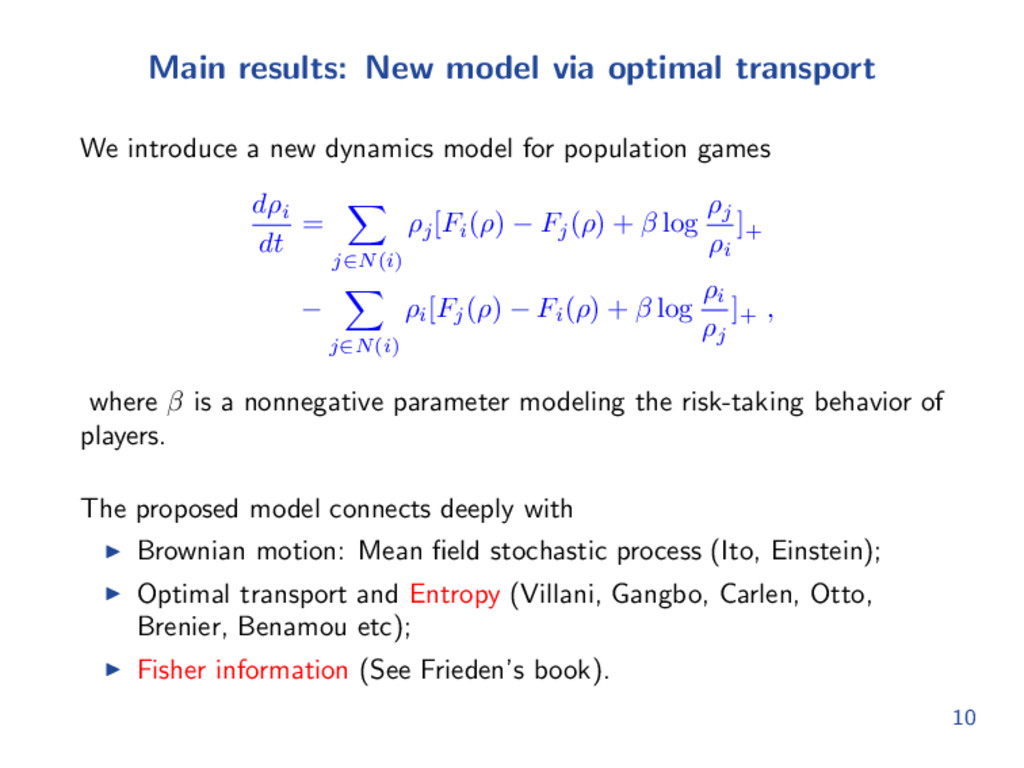
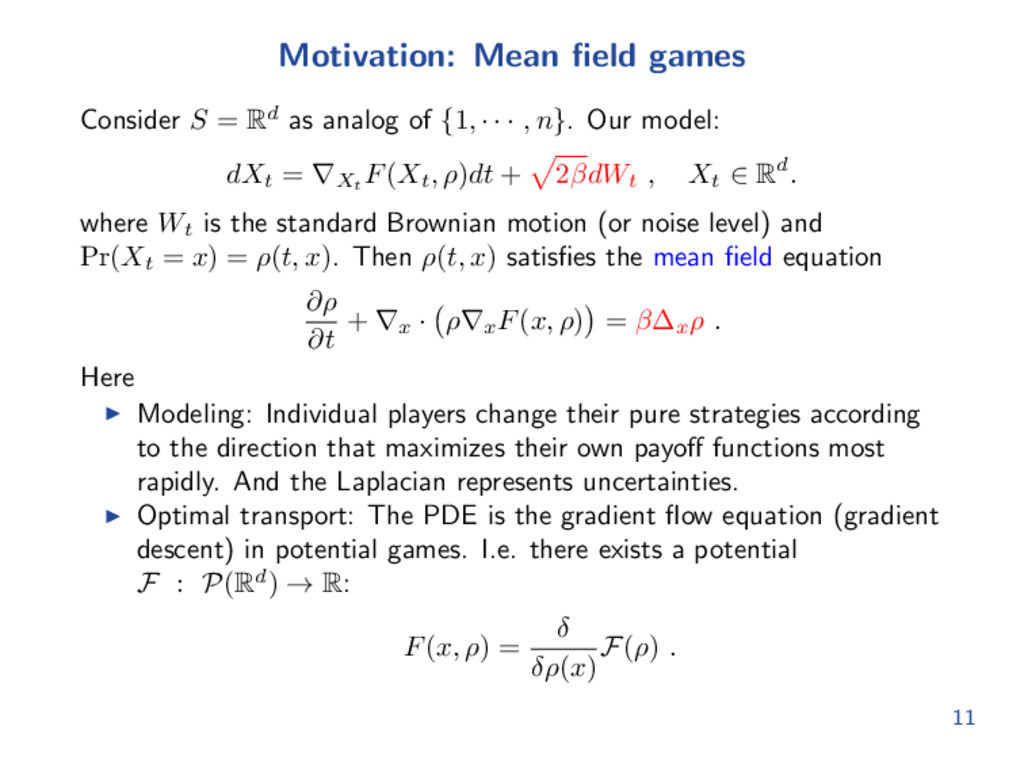
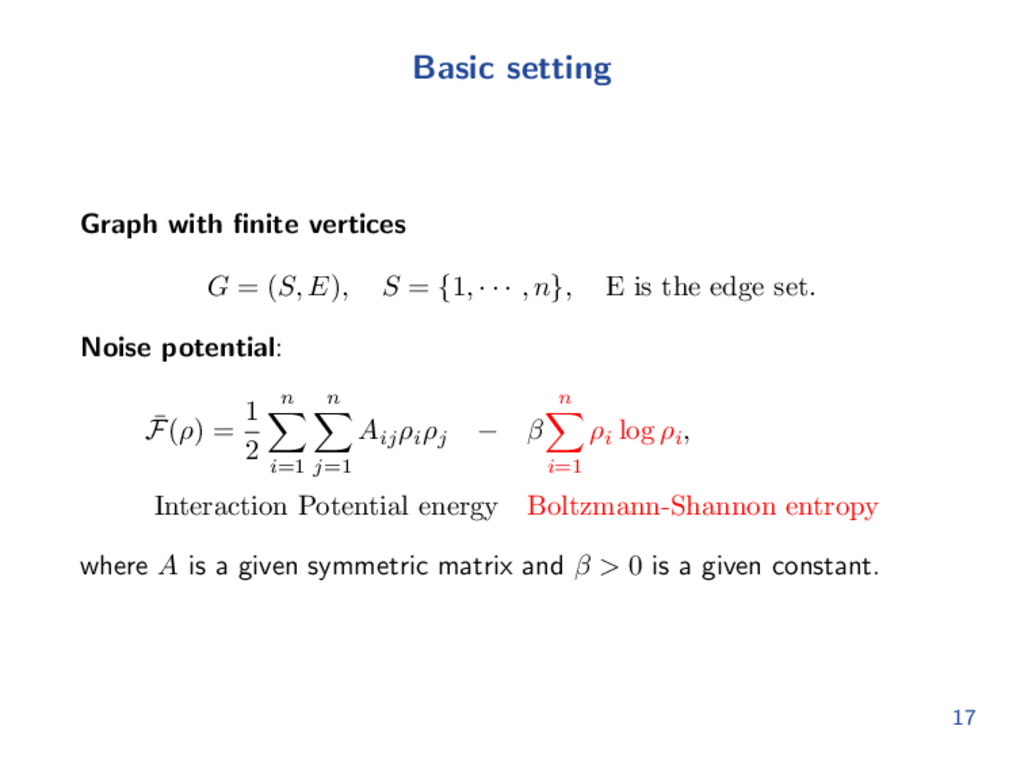
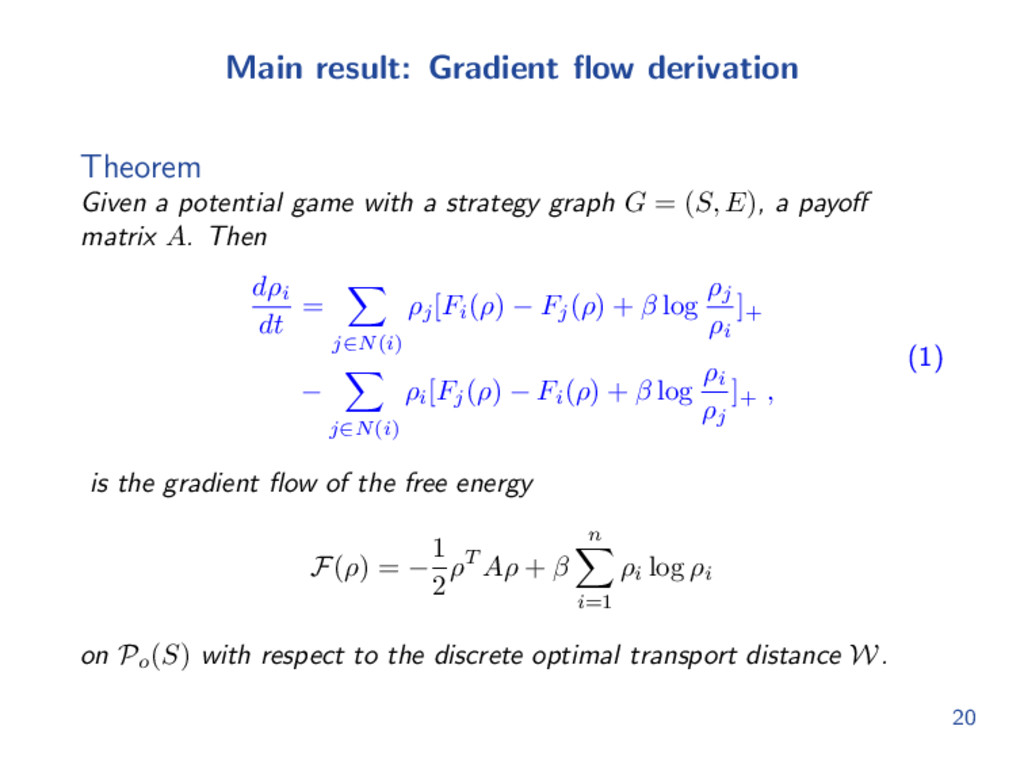
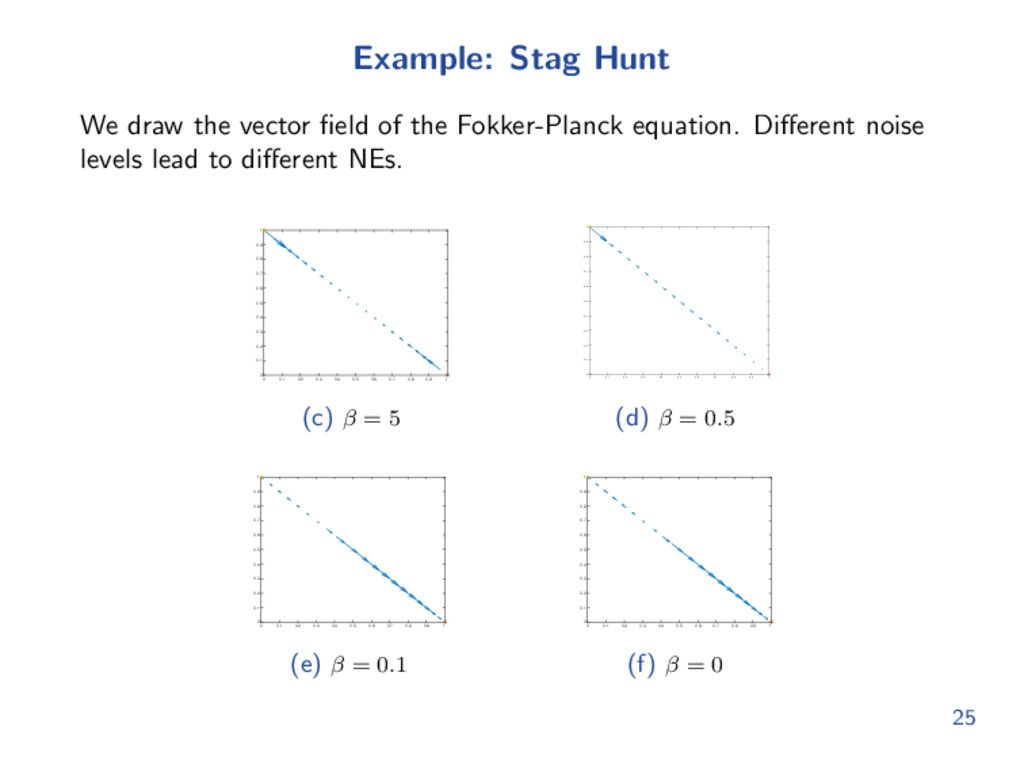
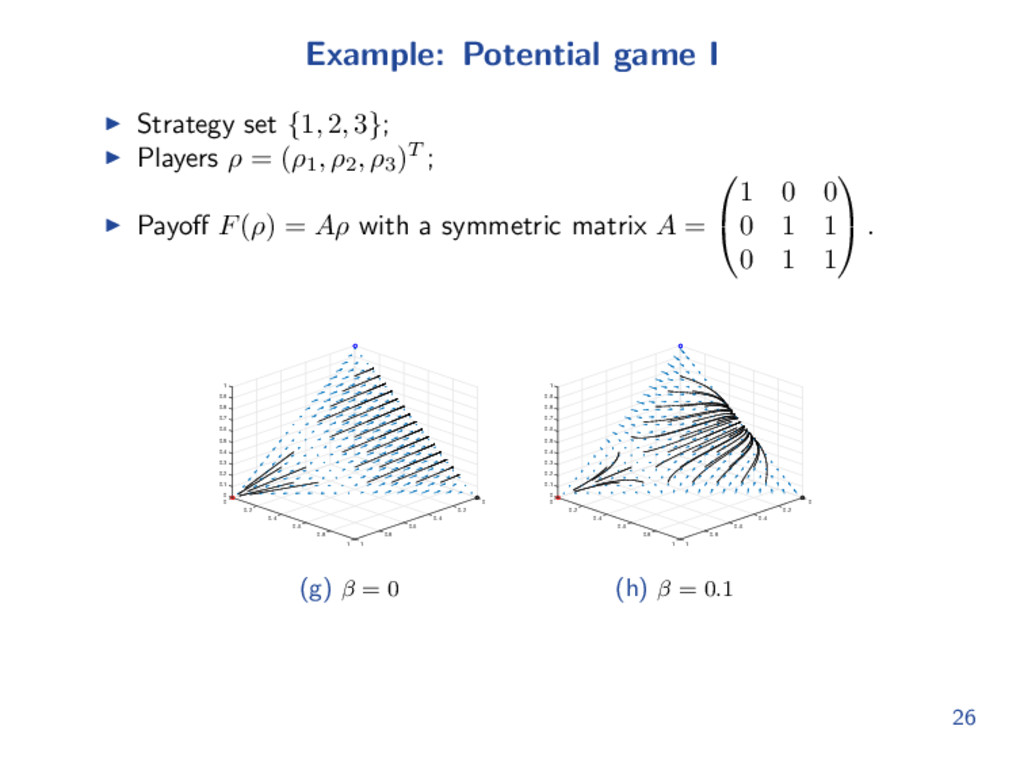
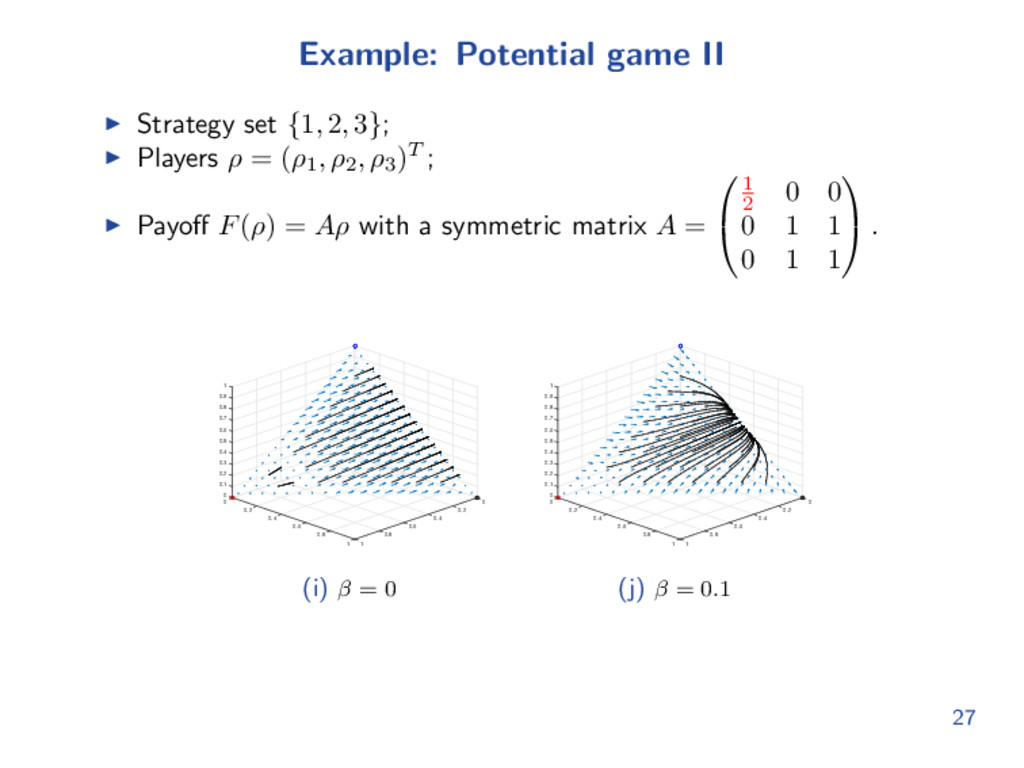
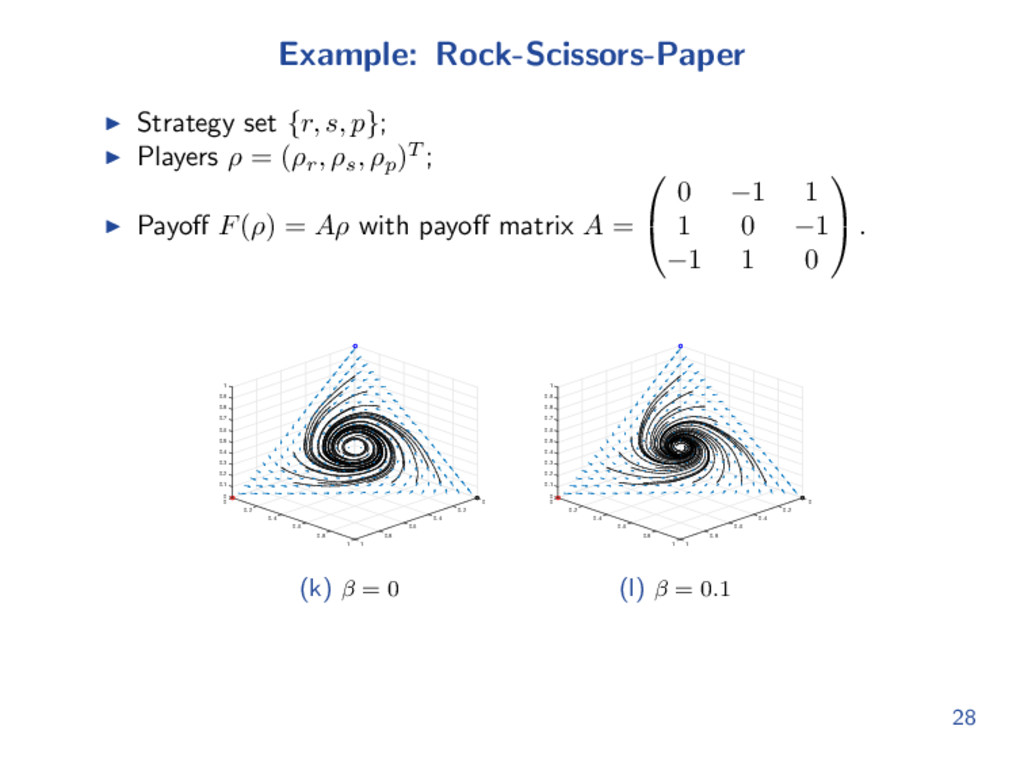
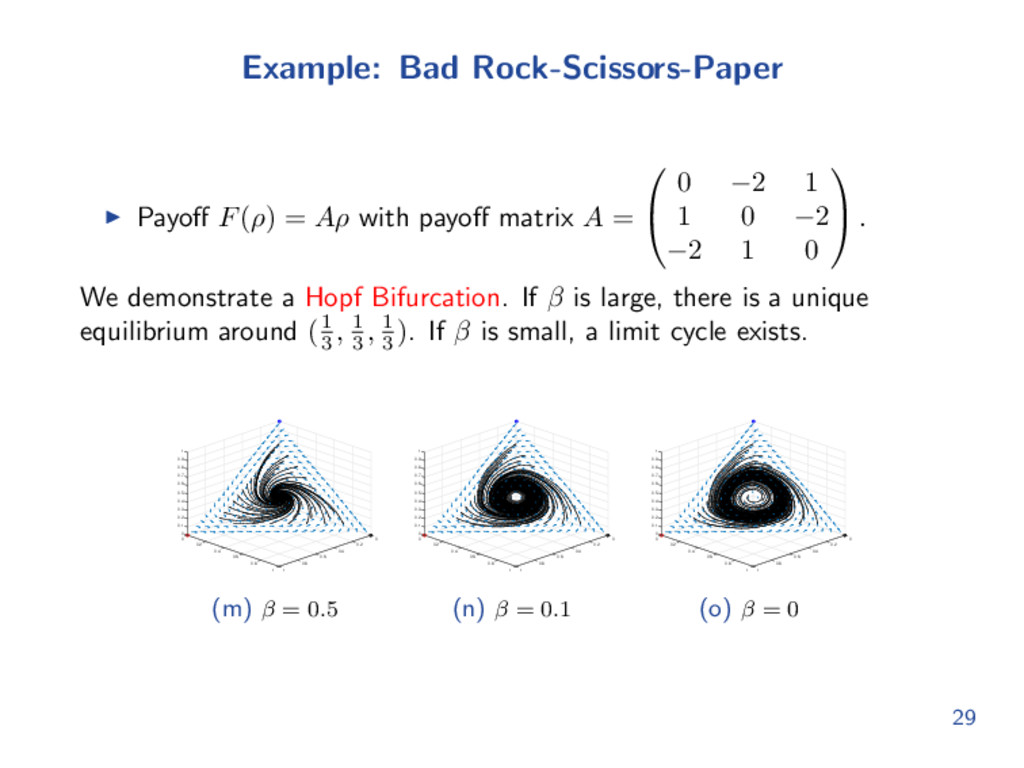
We propose a new evolutionary dynamics for population games with a discrete strategy set, inspired by the theory of optimal transport and Mean field games. The dynamics can be described as a Fokker-Planck equation on a discrete strategy set. The derived dynamics is the gradient flow of a free energy and the transition density equation of a Markov process. Such process provides models for the behavior of the individual players in population, which is myopic, greedy and irrational. The stability of the dynamics is governed by optimal transport metric, entropy and Fisher information.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}