このドキュメントは「システム/制御/情報」2017 年5 ⽉号に掲載された解説記事「マルチエージェントシミュレーションをはじめてみよう」の補⾜資料であり,記事の中でMAS のサンプルとして挙げている「サメ-⼩⿂モデル」について,具体的な構築⼿順を紹介します.サメ-⼩⿂モデルは記事の筆者が初学者にMAS を教える際の練習サンプルとして使⽤しているもので,極めて簡単なモデルでありながら視覚的に⾯⽩い創発現象を観察することができます.サメ-⼩⿂モデルやそれを活⽤した教育プログラムに関しての詳細は上記解説記事をご覧下さい.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
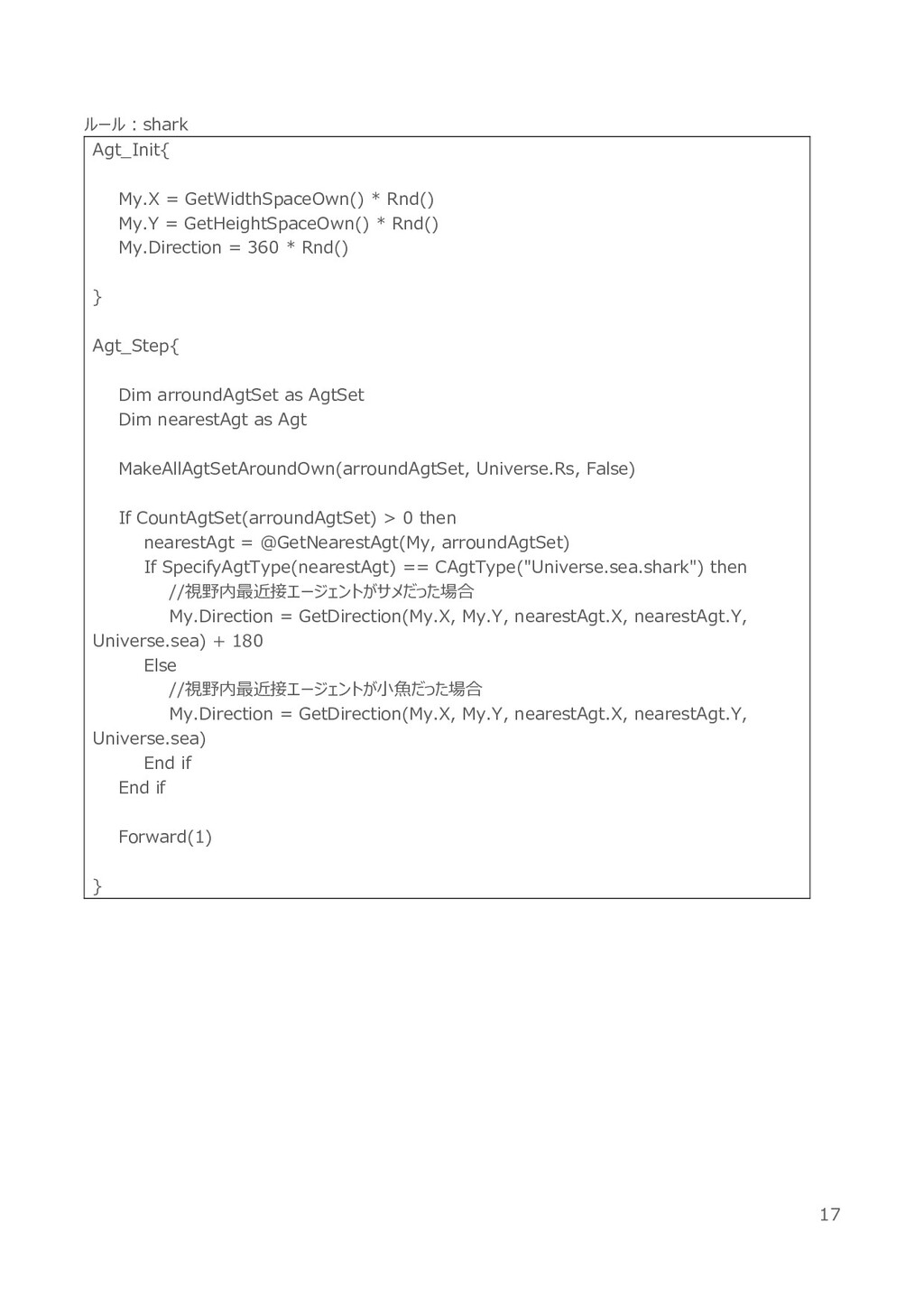
![11 [1] ⾃分から⾒て視野内(距離 Universe.Rs 内)にいるエージェントを全て取得し,エージェント集合型変数 arroundAgtSet に代⼊する:6 ⾏⽬ [2] arroundAgtSet](https://files.speakerdeck.com/presentations/6631fa1b6a8c4482a61e8870e3c21cd6/slide_10.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}