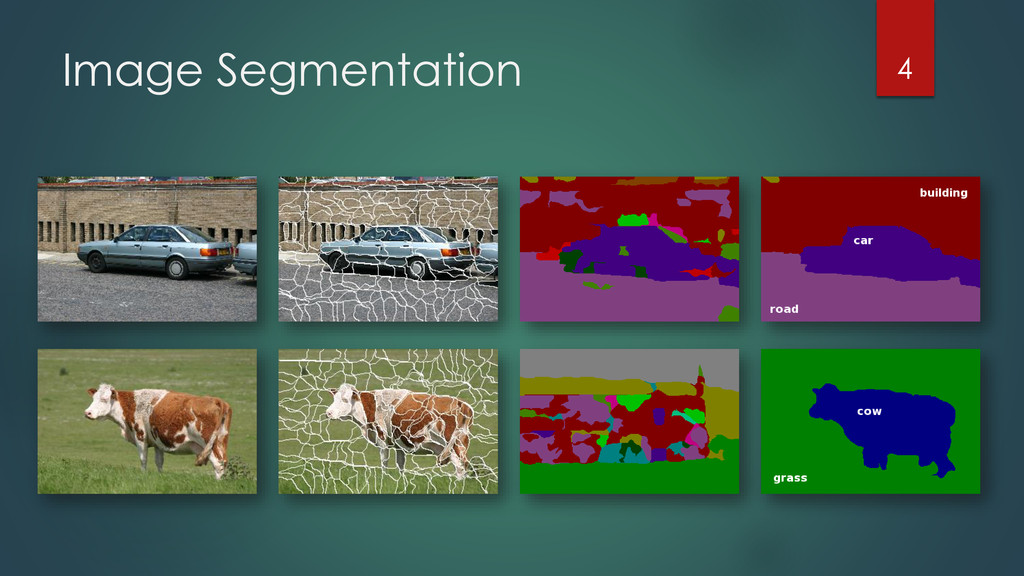
Metric Markov Random Field Image Segmentation Close pixels have same label Image Denoising Close pixels have same color Stereo Reconstruction Close points have same depth 14
Minimum number of samples for estimation Forward sampling (Bayesian Networks) Sample variable given it’s parents Markov Chain Monte Carlo (Markov Networks) Sample current state given previous one Gibbs Sampling Sample one variable given others 26
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}