cannot hide :) Should I use Android? Why not :) Come on... OK! Android contains everything you need to compose an indoor localization system Multiple Sensors, Multiple Wireless Interfaces And yes, you should use it! There is huge adoption of Android devices Android day to day evolves (some time backwards, but we can deal with it)
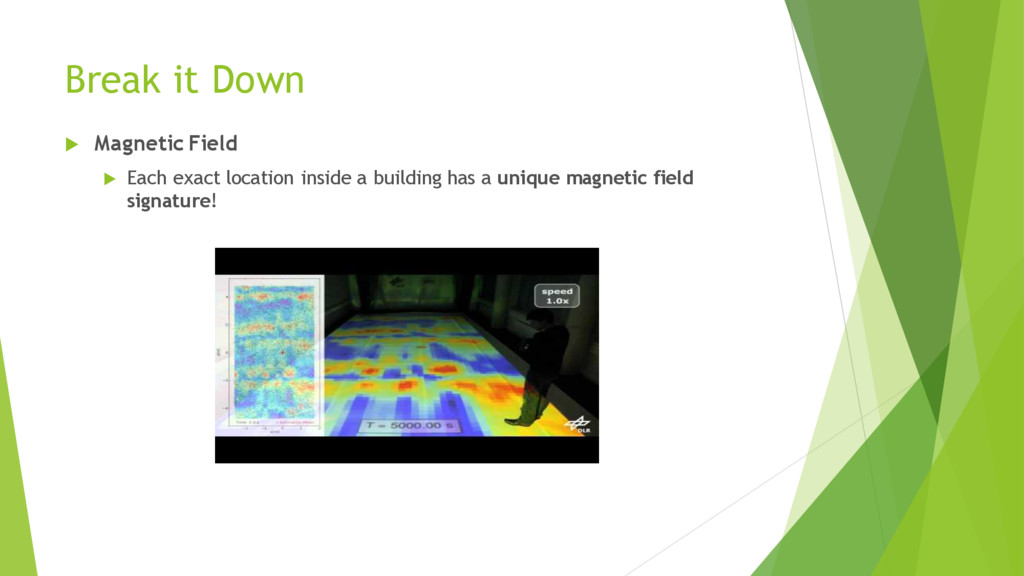
way to achieve this Android gives you the tools, and we have to use them OK then, what are these tools? WiFi Networks: SSID, RSSI (Received Signal Strength Indicator) Bluetooth: Beacons Magnetic Field: x, y, z coefficients (what??) Multiple Sensors: Gyroscope, Accelerometer, …
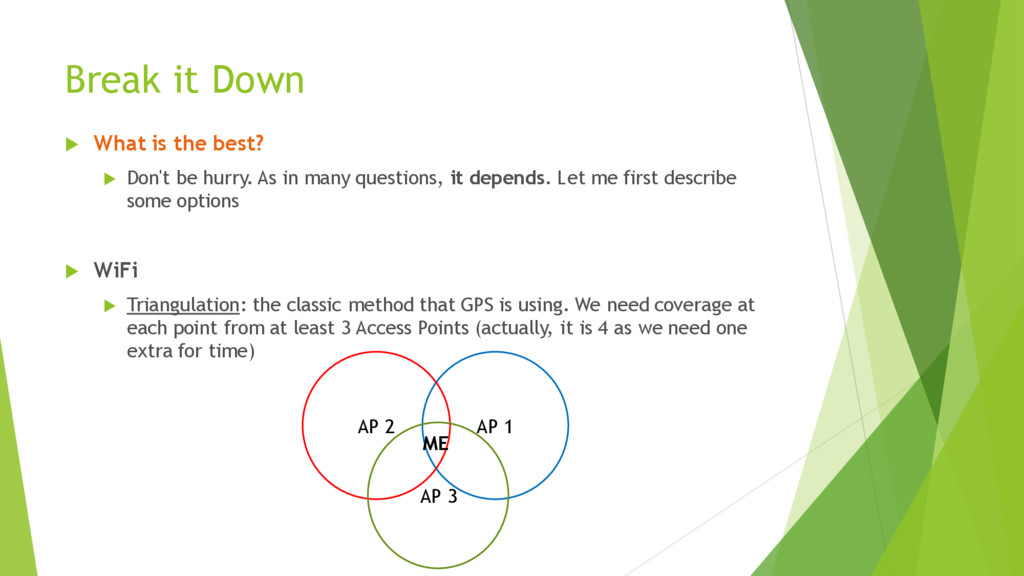
be hurry. As in many questions, it depends. Let me first describe some options WiFi Triangulation: the classic method that GPS is using. We need coverage at each point from at least 3 Access Points (actually, it is 4 as we need one extra for time) AP 1 AP 2 AP 3 ME
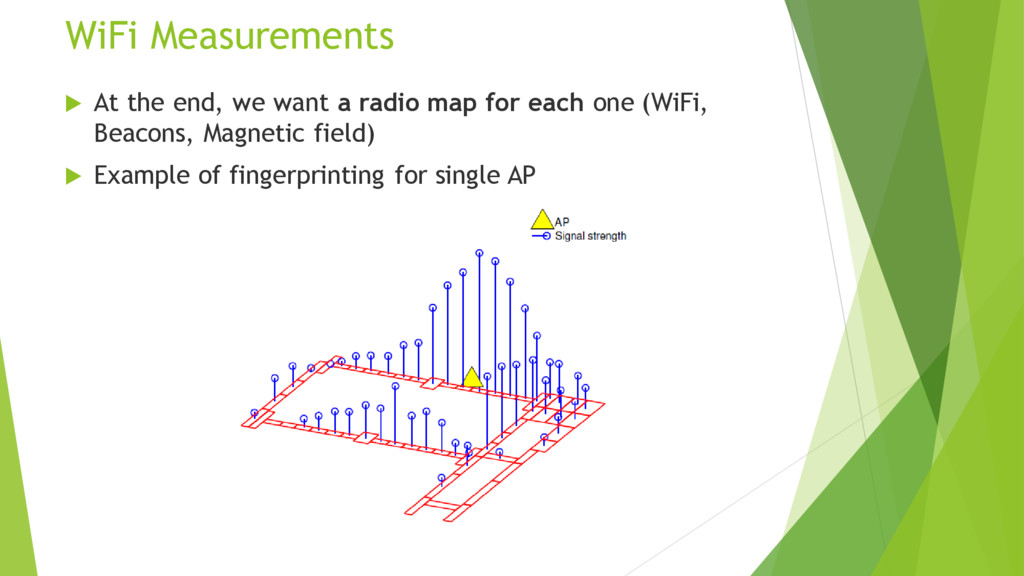
Phase 1 (offline or training): Create a Radio Map Phase 2 (online): Find me based on the radio map and real measurements Beacons Triangulation Fingerprinting Nearbys: Room level identification. Low level transmit power results in room identification for each beacon reception
Pros No training phase needed Cons Simultaneously coverage of at least 4 APs for each point Bad results (more times worse than 5 meters off, based on the chosen propagation model Fingerprinting Pros No need of multiple receptions at point Good accuracy Cons Need a training phase (the more extensive the better)
accuracy Low battery consumption Coverage everywhere (earth on duty!) No infrastructure Cons Need a training phase (the more extensive the better) There are serious differences of what each device measures
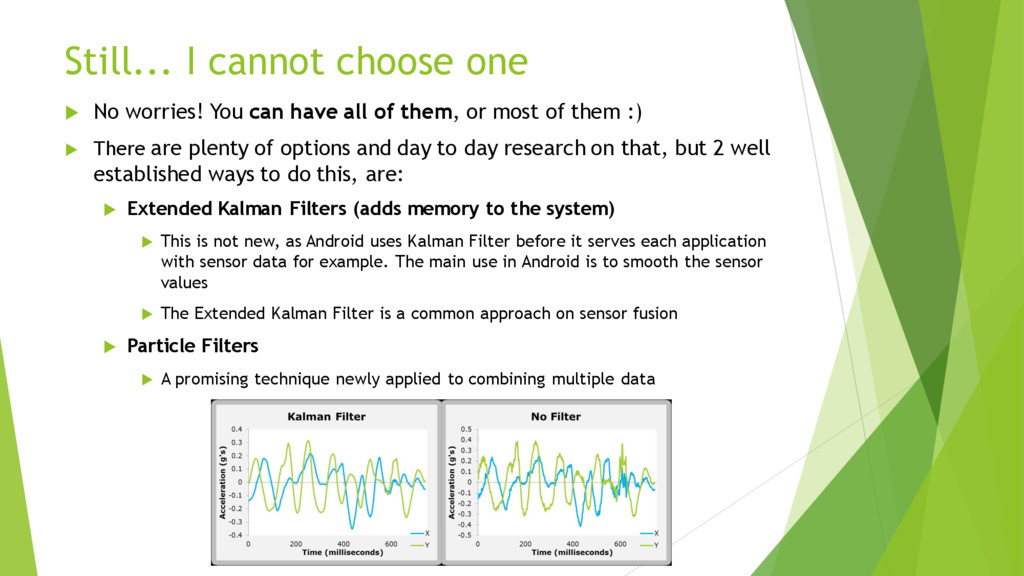
have all of them, or most of them :) There are plenty of options and day to day research on that, but 2 well established ways to do this, are: Extended Kalman Filters (adds memory to the system) This is not new, as Android uses Kalman Filter before it serves each application with sensor data for example. The main use in Android is to smooth the sensor values The Extended Kalman Filter is a common approach on sensor fusion Particle Filters A promising technique newly applied to combining multiple data
Beacons Fingerprinting Magnetic Field Modified/Extended Kalman Filters + Pattern Search Algorithm There is the need of a robust measurements campaign Multiple different devices Different orientations at same point Multiple measurements at same point No initial user interference
Retrieve WiFi, Beacons and Magnetic Fields measurements every period of 'X' I can read the developer.android.com for that... Sure! But there are a couple of issues I faced with each measurement which is good to know...
Cannot get measurements as frequent as you want Actually, you can, but you will get the same results You are always based on the chipset and the Android kernel Examples of minimum period for different Android versions: Android 4: 5 seconds Android 4.4.2: less than 2 seconds Android 5/6: less than 1 second What to use? 1, 2 or 5? Let the system decide...
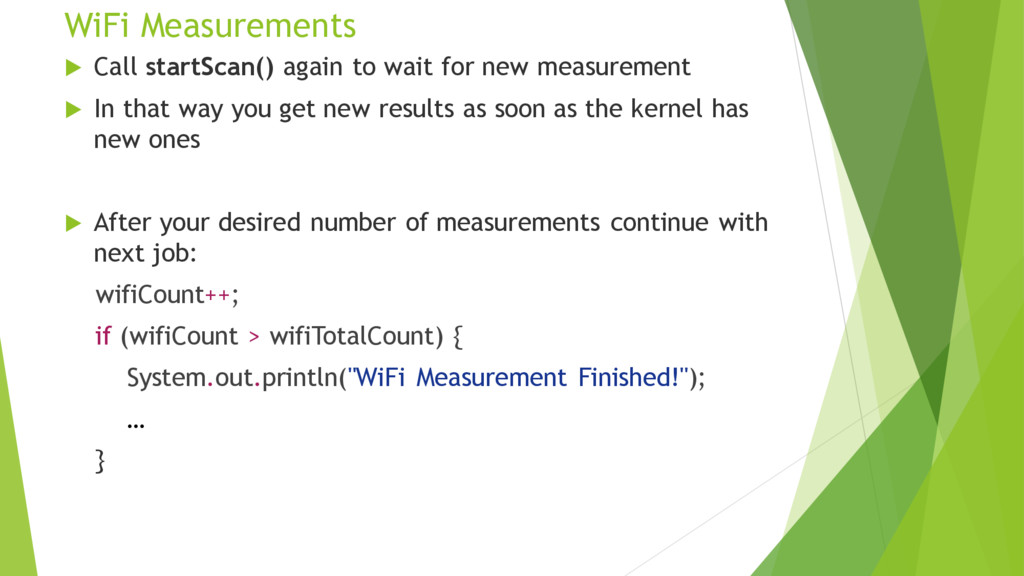
measurement In that way you get new results as soon as the kernel has new ones After your desired number of measurements continue with next job: wifiCount++; if (wifiCount > wifiTotalCount) { System.out.println("WiFi Measurement Finished!"); … }
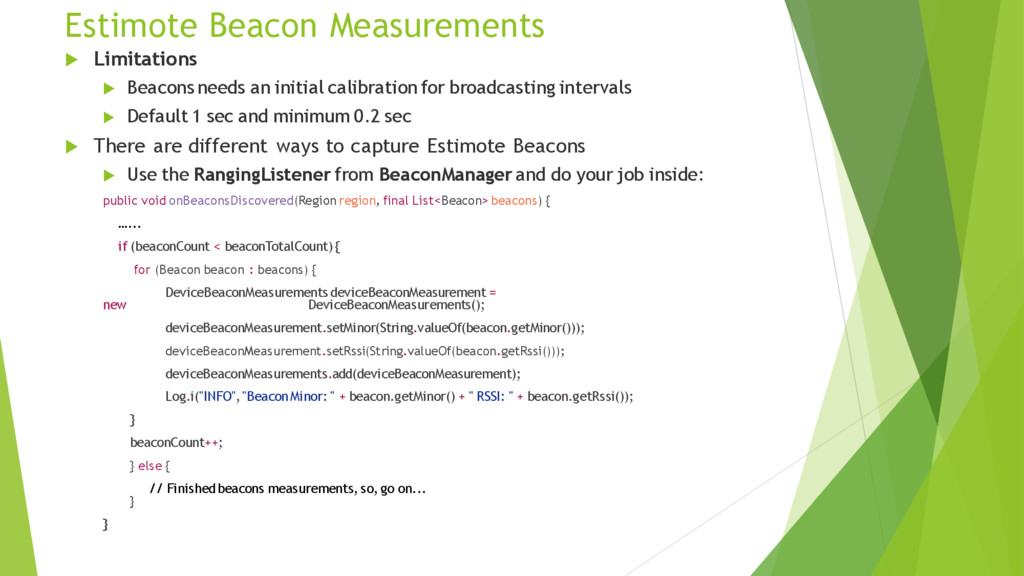
calibration for broadcasting intervals Default 1 sec and minimum 0.2 sec There are different ways to capture Estimote Beacons Use the RangingListener from BeaconManager and do your job inside: public void onBeaconsDiscovered(Region region, final List<Beacon> beacons) { …... if (beaconCount < beaconTotalCount) { for (Beacon beacon : beacons) { DeviceBeaconMeasurements deviceBeaconMeasurement = new DeviceBeaconMeasurements(); deviceBeaconMeasurement.setMinor(String.valueOf(beacon.getMinor())); deviceBeaconMeasurement.setRssi(String.valueOf(beacon.getRssi())); deviceBeaconMeasurements.add(deviceBeaconMeasurement); Log.i("INFO", "Beacon Minor: " + beacon.getMinor() + " RSSI: " + beacon.getRssi()); } beaconCount++; } else { // Finished beacons measurements, so, go on... } }
faster measurements but we cannot In Magnetic Field (MF) Measurements we want slower measurements The MF measurements arrive extremely fast from the continuous magnetometer of the smartphone We need a better channel sampling for each point, so, we want to slow down our values There are multiple ways to achieve that Get all the values and filter out only those with specific intervals Register and unregister to sensor in specific intervals ...
get continuous values and filter out, otherwise you can do something like: CountDownTimer magneticCountDownTimer = new CountDownTimer(3000, 1000) { @Override public void onTick(long millisUntilFinished) { sensorManager.registerListener(magneticListener, sensorManager.getDefaultSensor(Sensor.TYPE_MAGNETIC_FIELD),SensorManager.SENSOR_DELAY_NORMAL); } @Override public void onFinish() { retrieveBLEStats(); } }; And then in onSensorChanged do your job as usual @Override public void onSensorChanged(SensorEvent event) { if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) { DeviceMagneticMeasurements deviceMagneticMeasurement = new DeviceMagneticMeasurements(); deviceMagneticMeasurement.setxValue(String.valueOf(event.values[0])); deviceMagneticMeasurement.setyValue(String.valueOf(event.values[1])); deviceMagneticMeasurement.setzValue(String.valueOf(event.values[2])); deviceMagneticMeasurements.add(deviceMagneticMeasurement); sensorManager.unregisterListener(magneticListener); } }
help you: Log-Normal for RSSI WiFi and Beacons Normal for Magnetic Field (in general the orientation will also follow the Normal distribution) In that way you will be able to: Export an estimated error for each measurement estimation Assist the algorithm to apply weights where we are more confident If there is high error in WiFi estimation we will apply small weight
conditions Make as much measurements per point Use different orientations per point Use different devices Create a density grid Preferably remotely control the application, e.g.: Proof of Concept: Socket Production: GCM Production: MQTT Paho at Android side and RabbitMQ + MQTT Adapter at Server side ...
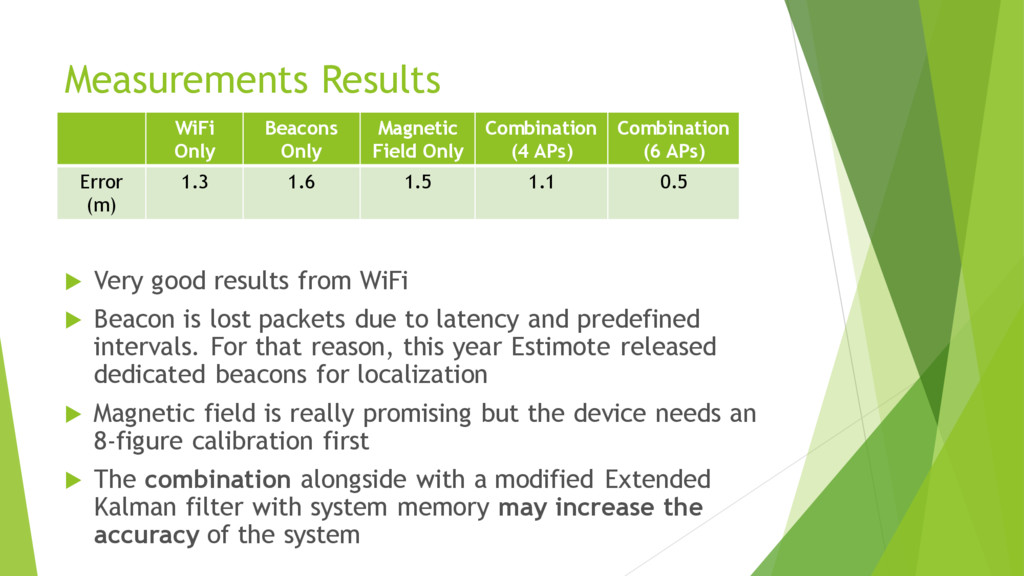
(4 APs) Combination (6 APs) Error (m) 1.3 1.6 1.5 1.1 0.5 Very good results from WiFi Beacon is lost packets due to latency and predefined intervals. For that reason, this year Estimote released dedicated beacons for localization Magnetic field is really promising but the device needs an 8-figure calibration first The combination alongside with a modified Extended Kalman filter with system memory may increase the accuracy of the system
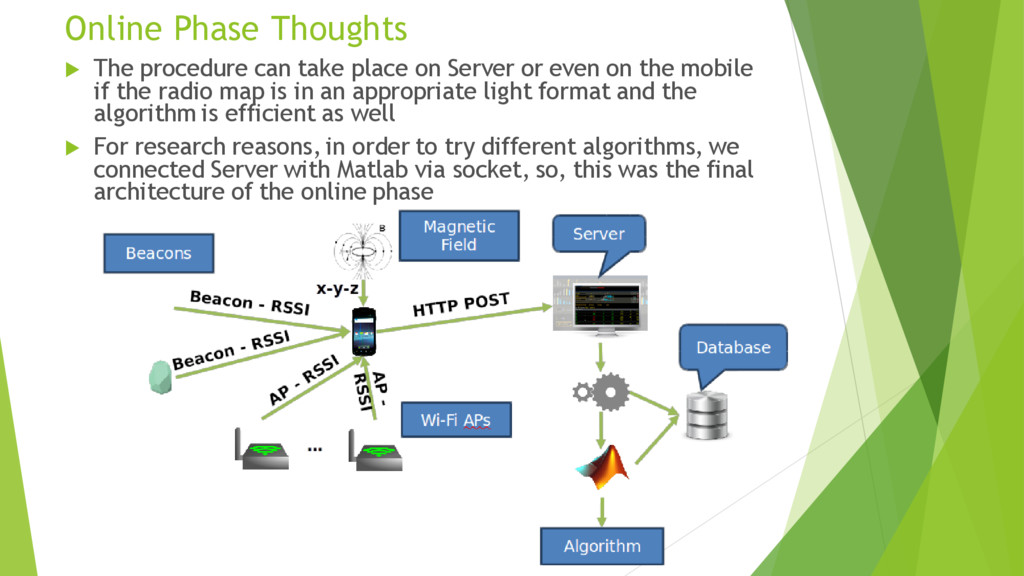
Server or even on the mobile if the radio map is in an appropriate light format and the algorithm is efficient as well For research reasons, in order to try different algorithms, we connected Server with Matlab via socket, so, this was the final architecture of the online phase
sensorManager = (SensorManager) getSystemService(SENSOR_SERVICE); sensor = sensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION); sensorManager.registerListener(mySensorEventListener, sensor, SensorManager.SENSOR_DELAY_NORMAL); In onSensorChanged get and update the azimuthal value: azimuth = event.values[0]; float degree = Math.round(event.values[0]); Continuously Broadcast the up to date azimuthal in the WiFi network's broadcast address (most of times you can get it from DHCP): ... socket.setBroadcast(true); socket.setReuseAddress(true); String messageStr = "azimuth=" + String.valueOf(azimuth); InetAddress local = InetAddress.getByName(broadcastAddress); int msg_length=messageStr.length(); byte[] message = messageStr.getBytes(); DatagramPacket p = new DatagramPacket(message, msg_length, local, SERVER_PORT); socket.send(p); ...
to listen for sensor updates Setup a UDP Socket Server to retrieve the reference azimuthal Continuously Perform the combination: float degree = azimuthLocal - azimuthReference; Update any graphical staff such as compass
The users may be passive or active. Till now we mostly discussed the passive way Some other solutions may contain: Barcode/QR scanner: the user scan tags in walls for example to identify his/her exact location RFID tags: the user keeps a tag (such as wristlet) and passes it in various entry points, for room level localization And many other solutions...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}