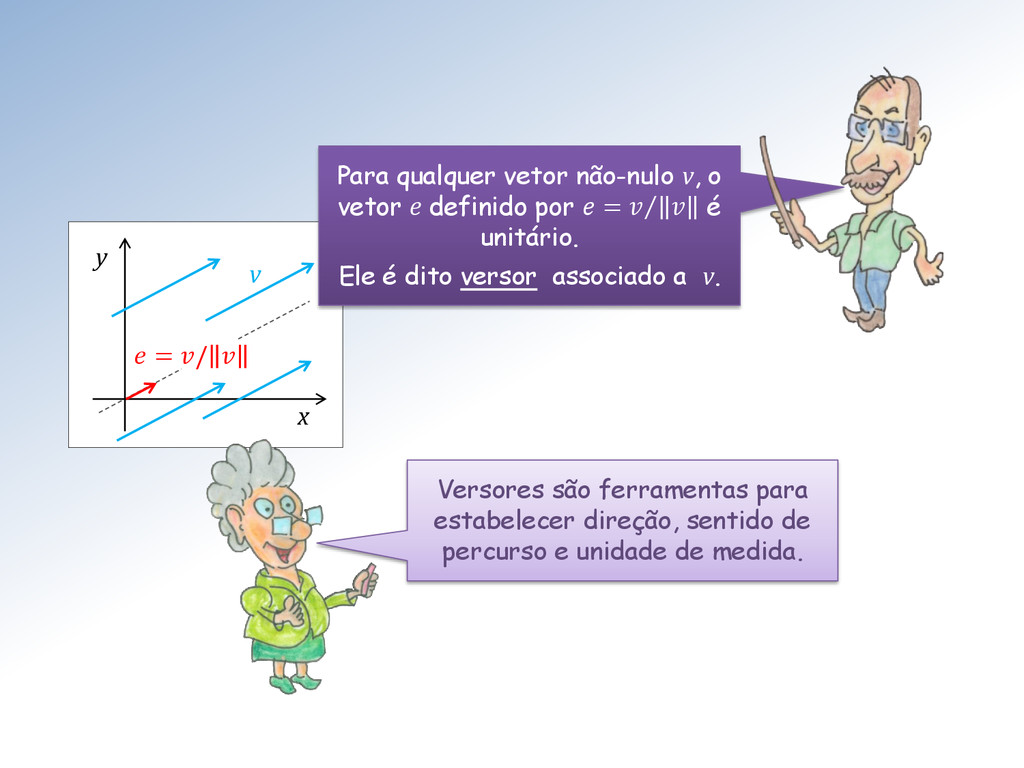
o vetor e definido por = é unitário. Ele é dito versor associado a v. Versores são ferramentas para estabelecer direção, sentido de percurso e unidade de medida.
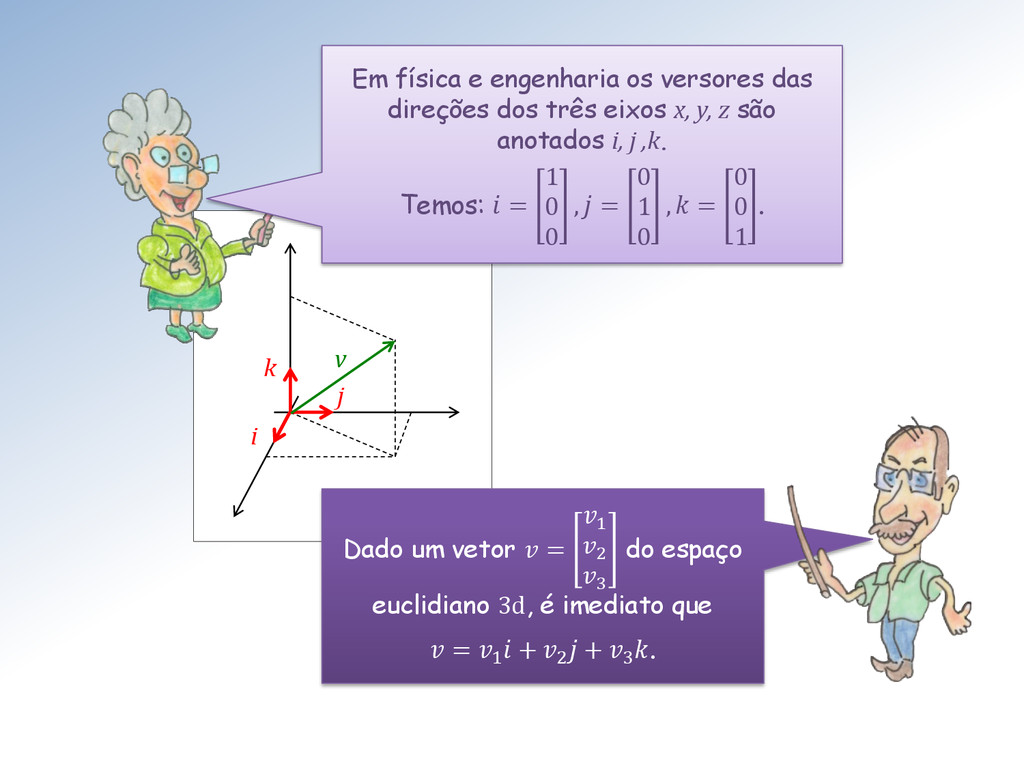
das direções dos três eixos x, y, z são anotados i, j ,k. Temos: = 1 0 0 , = 0 1 0 , = 0 0 1 . Dado um vetor = 1 2 3 do espaço euclidiano 3d, é imediato que = 1 + 2 + 3 .
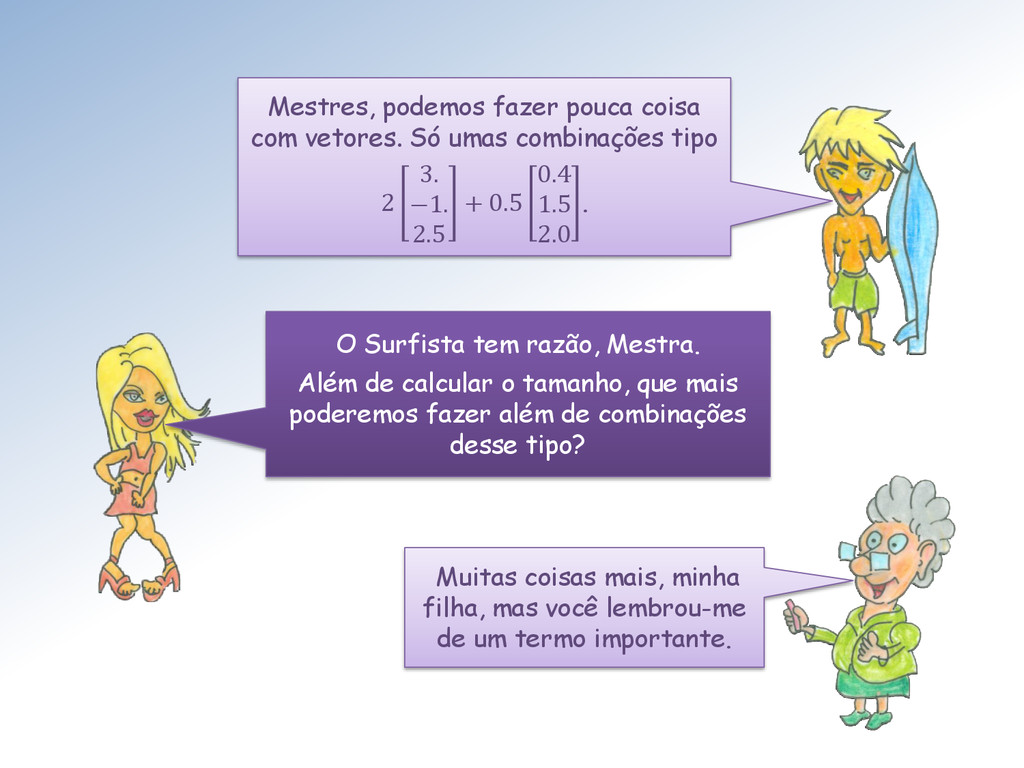
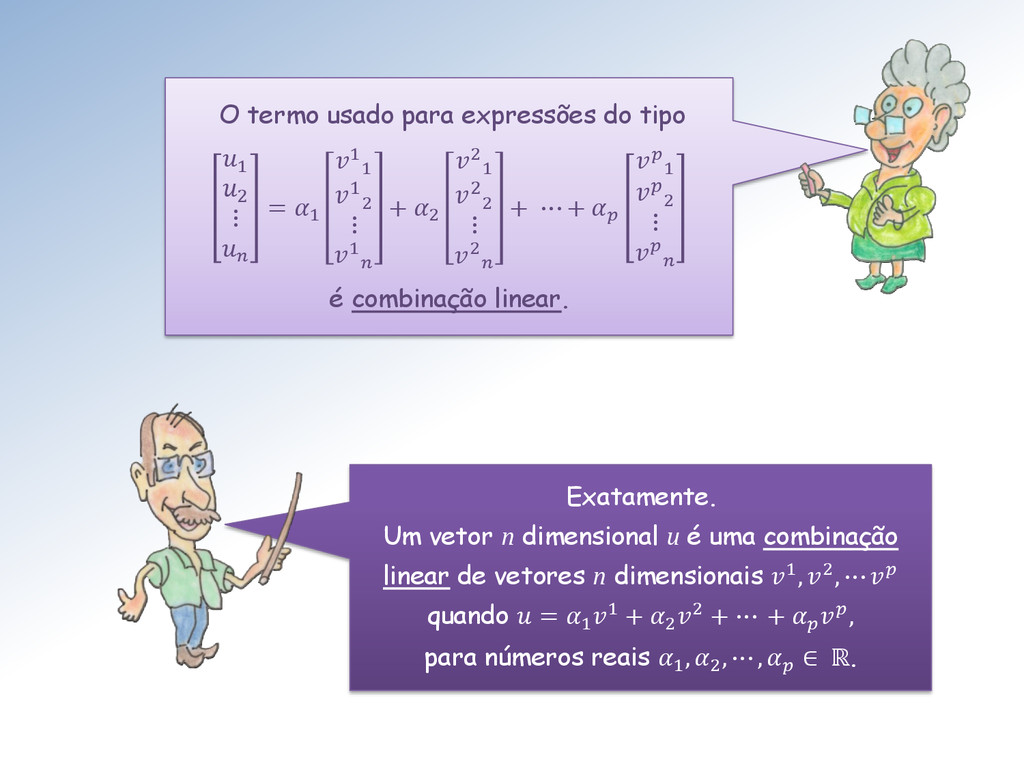
que mais poderemos fazer além de combinações desse tipo? Muitas coisas mais, minha filha, mas você lembrou-me de um termo importante. Mestres, podemos fazer pouca coisa com vetores. Só umas combinações tipo 2 3. −1. 2.5 + 0.5 0.4 1.5 2.0 .
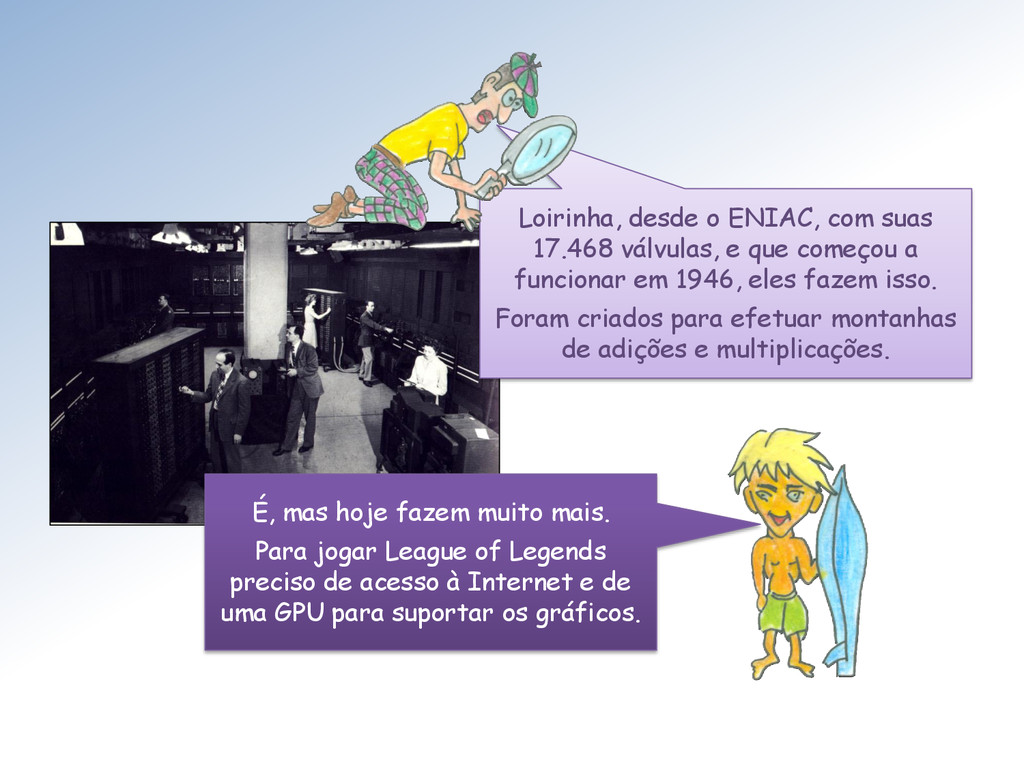
começou a funcionar em 1946, eles fazem isso. Foram criados para efetuar montanhas de adições e multiplicações. É, mas hoje fazem muito mais. Para jogar League of Legends preciso de acesso à Internet e de uma GPU para suportar os gráficos.
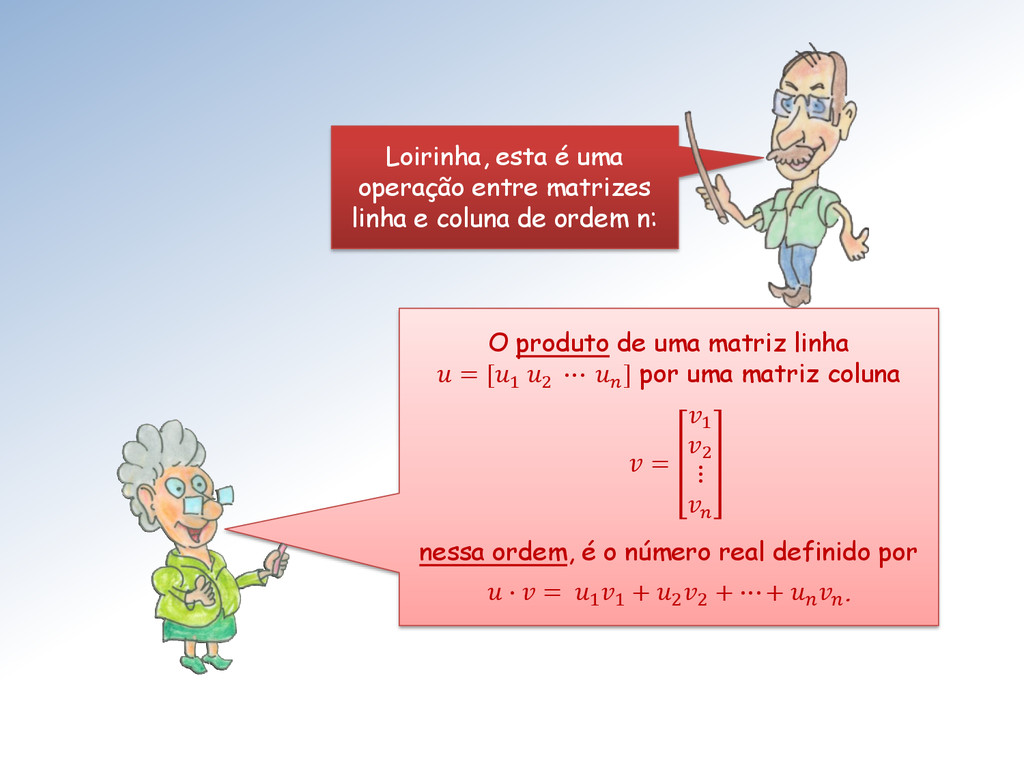
] por uma matriz coluna = 1 2 ⋮ nessa ordem, é o número real definido por ∙ = 1 1 + 2 2 + ⋯ + . Loirinha, esta é uma operação entre matrizes linha e coluna de ordem n:
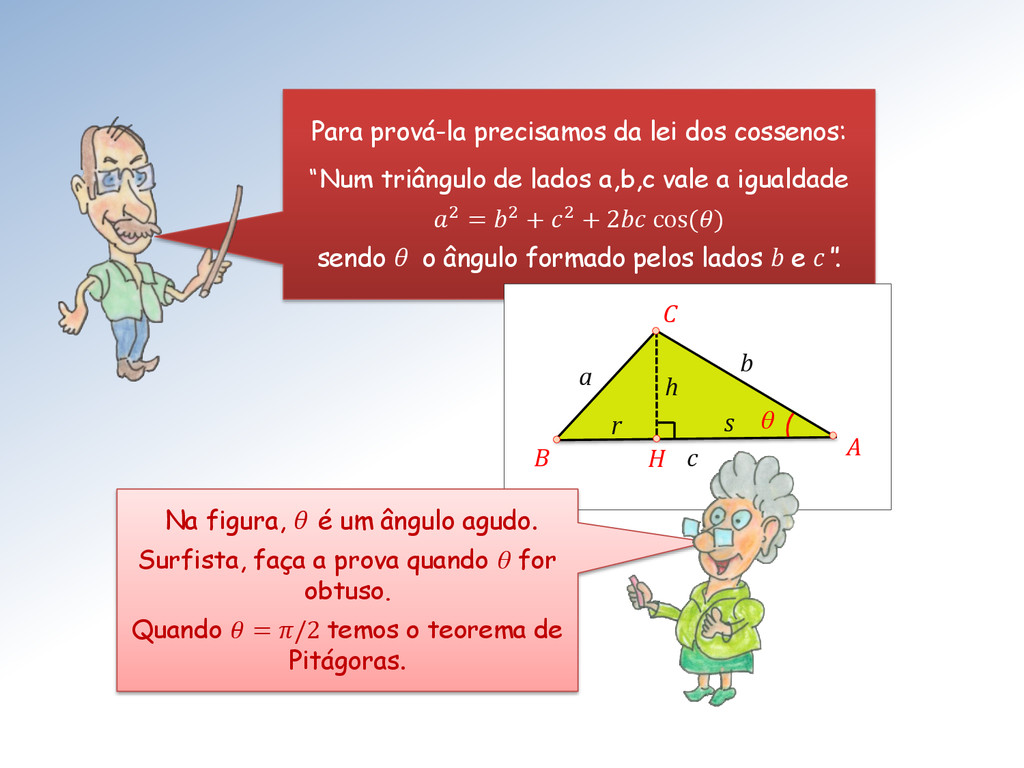
lados a,b,c vale a igualdade 2 = 2 + 2 + 2 cos() sendo θ o ângulo formado pelos lados b e c“. a b c θ A B C H s r h Na figura, θ é um ângulo agudo. Surfista, faça a prova quando θ for obtuso. Quando = /2 temos o teorema de Pitágoras.
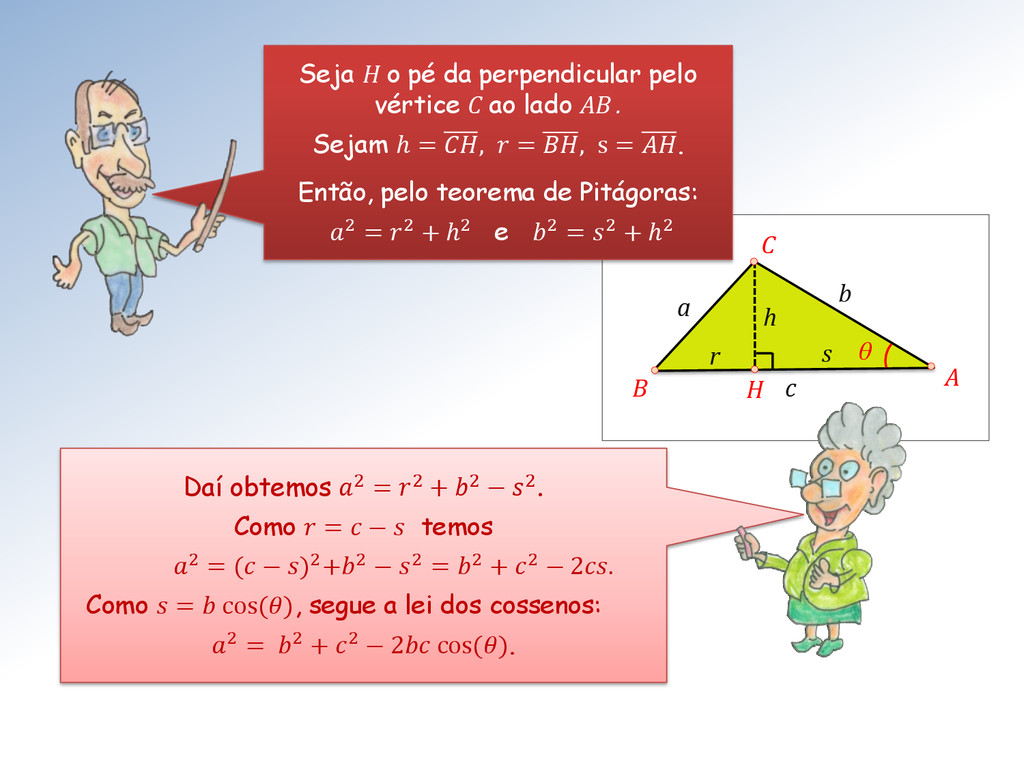
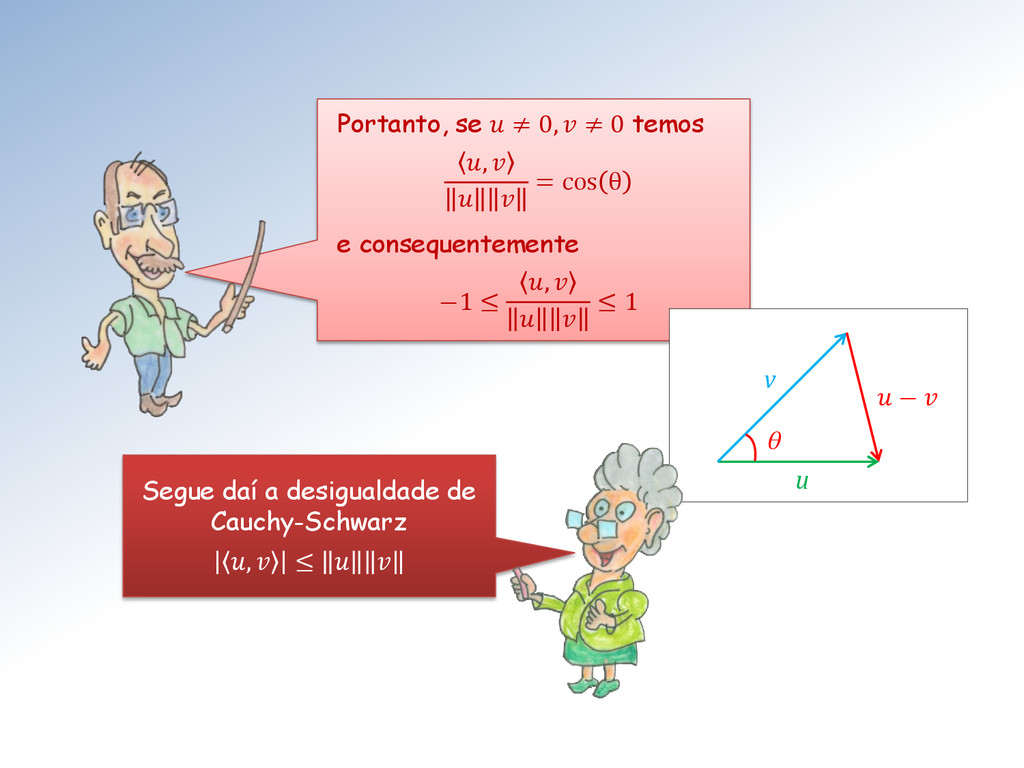
h Seja H o pé da perpendicular pelo vértice C ao lado AB . Sejam ℎ = , = , s = . Então, pelo teorema de Pitágoras: 2 = 2 + ℎ2 e 2 = 2 + ℎ2 Daí obtemos 2 = 2 + 2 − 2. Como = − temos 2 = ( − )2+2 − 2 = 2 + 2 − 2. Como = cos(), segue a lei dos cossenos: 2 = 2 + 2 − 2 cos().
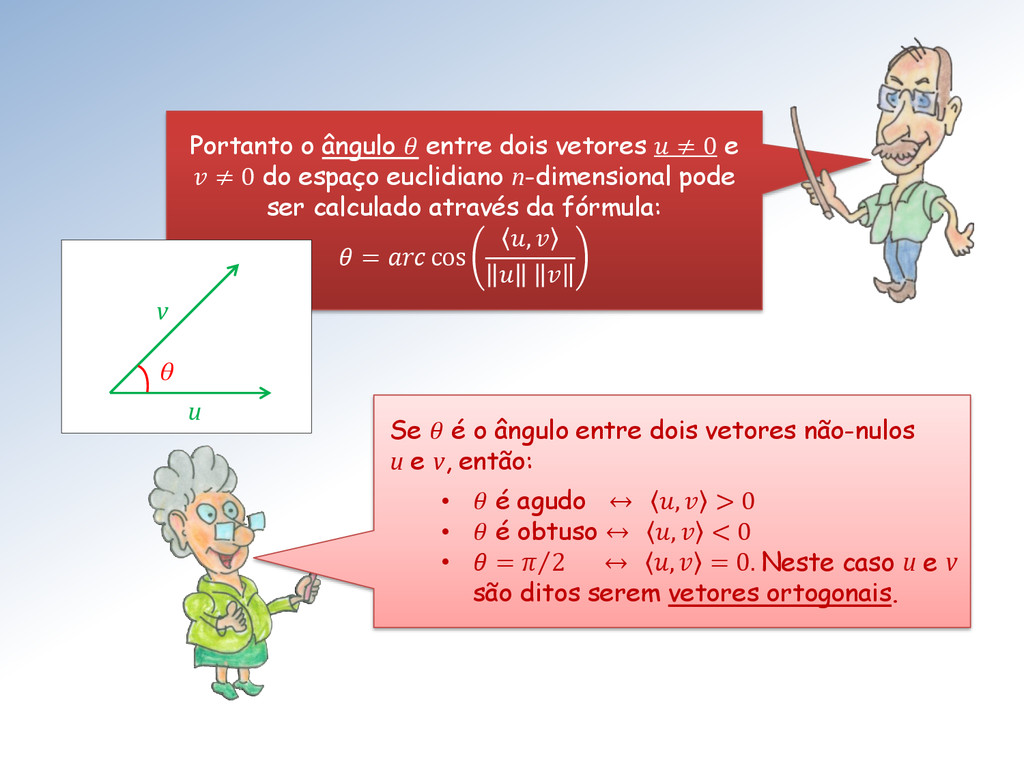
0 do espaço euclidiano n-dimensional pode ser calculado através da fórmula: = cos , Se é o ângulo entre dois vetores não-nulos u e v, então: • é agudo ↔ , > 0 • é obtuso ↔ , < 0 • = 2 ↔ , = 0. Neste caso u e v são ditos serem vetores ortogonais. θ v u
importantíssimo em álgebra linear, matemática e matemática aplicada. Projeções ortogonais são muito usadas por físicos e engenheiros para determinar a “componente de uma força” ou a “componente da velocidade” numa determinada direção.
Ensaiador: “ A filosofia está escrita neste grande livro, o universo... Ele está escrito na linguagem da matemática e seus caracteres são triângulos, círculos e outras figuras geométricas...”
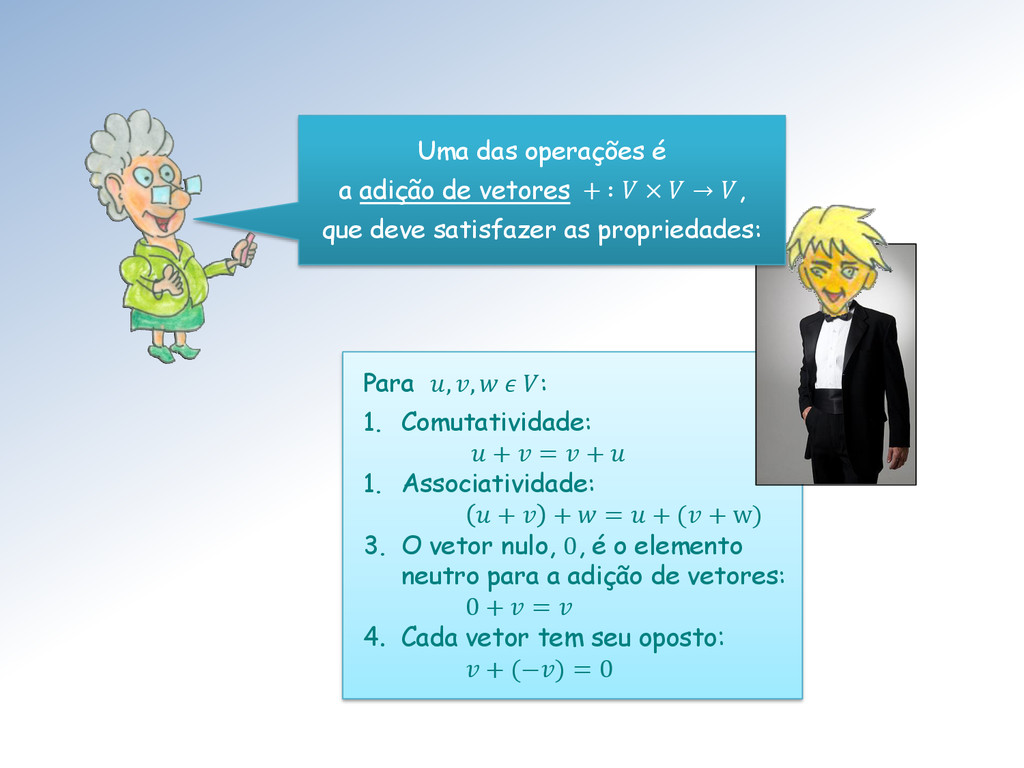
Associatividade: + + = + ( + w) 3. O vetor nulo, 0, é o elemento neutro para a adição de vetores: 0 + = 4. Cada vetor tem seu oposto: + (−) = 0 Uma das operações é a adição de vetores + ∶ × → , que deve satisfazer as propriedades:
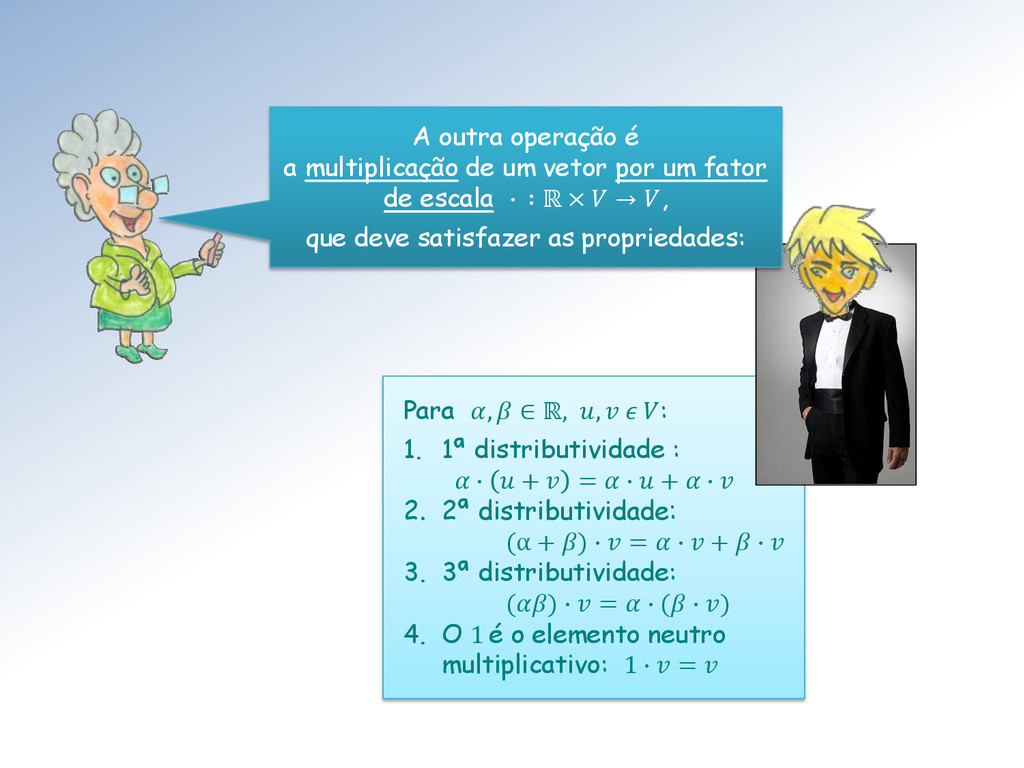
∙ + = ∙ + ∙ 2. 2ª distributividade: (α + ) ∙ = ∙ + ∙ 3. 3ª distributividade: () ∙ = ∙ ( ∙ ) 4. O 1 é o elemento neutro multiplicativo: 1 ∙ = A outra operação é a multiplicação de um vetor por um fator de escala ∙ ∶ ℝ × → , que deve satisfazer as propriedades:
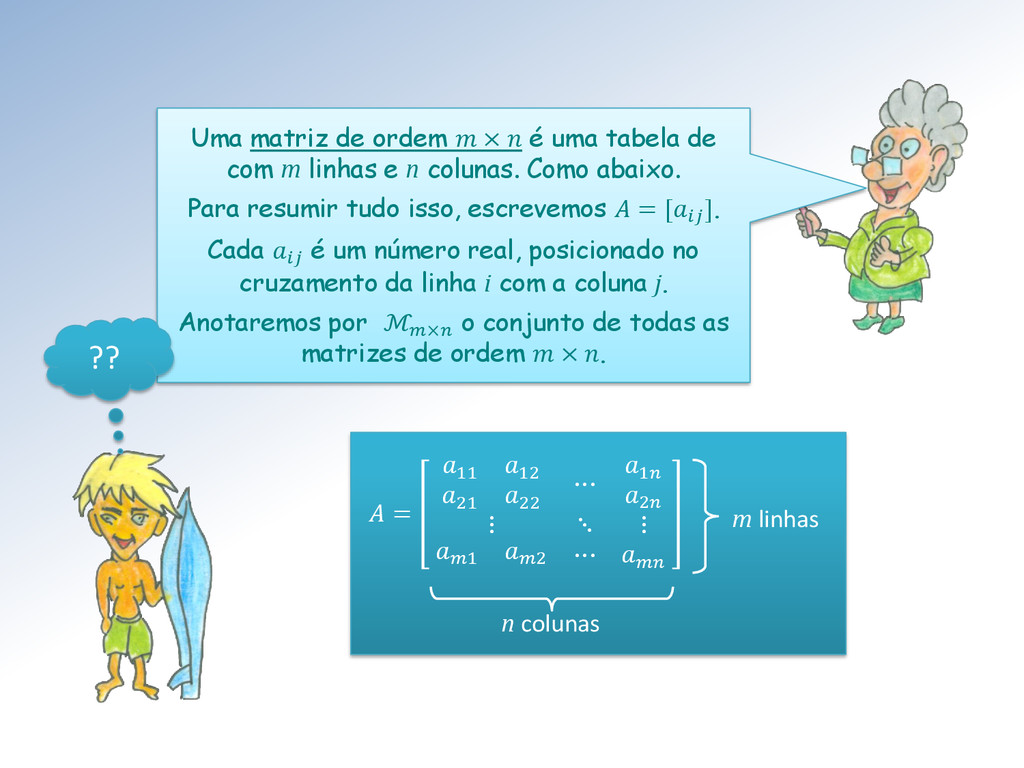
m linhas e n colunas. Como abaixo. Para resumir tudo isso, escrevemos = [ ]. Cada é um número real, posicionado no cruzamento da linha i com a coluna j. Anotaremos por ℳ× o conjunto de todas as matrizes de ordem × . = 11 12 21 22 ⋯ 1 2 ⋮ ⋱ ⋮ 1 2 ⋯ m linhas n colunas ??
ser somados e escalados. E precisam cumprir as oito propriedades listadas na definição. Sim, temos que saber somar matrizes e multiplicá-las por números reais. E verificar que elas satisfazem as oito propriedades.
−0.5 2.0 1.0 1.0 −1.0 = 2.5 2.5 3.0 0. 1.0 1.5 A soma entre entre uma matriz = [ ] e uma matriz = [ ], ambas de ℳ× , é a matriz de ℳ× dada por + = [ + ].
e uma matriz = [ ] de ℳ× é a matriz de ℳ× definida por = [ ]. Para = 2. e = 1.1 0.7 −1.4 2.3 temos = 2.∗ 1.1 2.∗ 0.7 2 ∗ (−1.4) 2 ∗ 2.3 = 2.2 1.4 −2.8 4.6 .
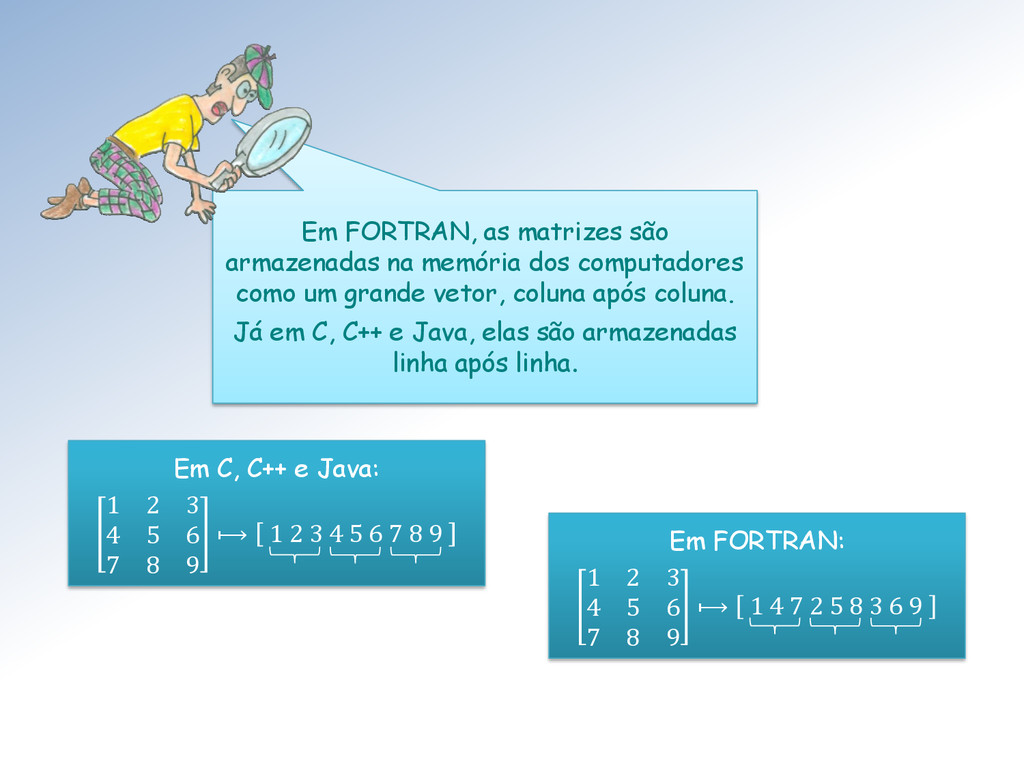
como um grande vetor, coluna após coluna. Já em C, C++ e Java, elas são armazenadas linha após linha. Em C, C++ e Java: 1 2 3 4 5 6 7 8 9 ⟼ 1 2 3 4 5 6 7 8 9 Em FORTRAN: 1 2 3 4 5 6 7 8 9 ⟼ 1 4 7 2 5 8 3 6 9
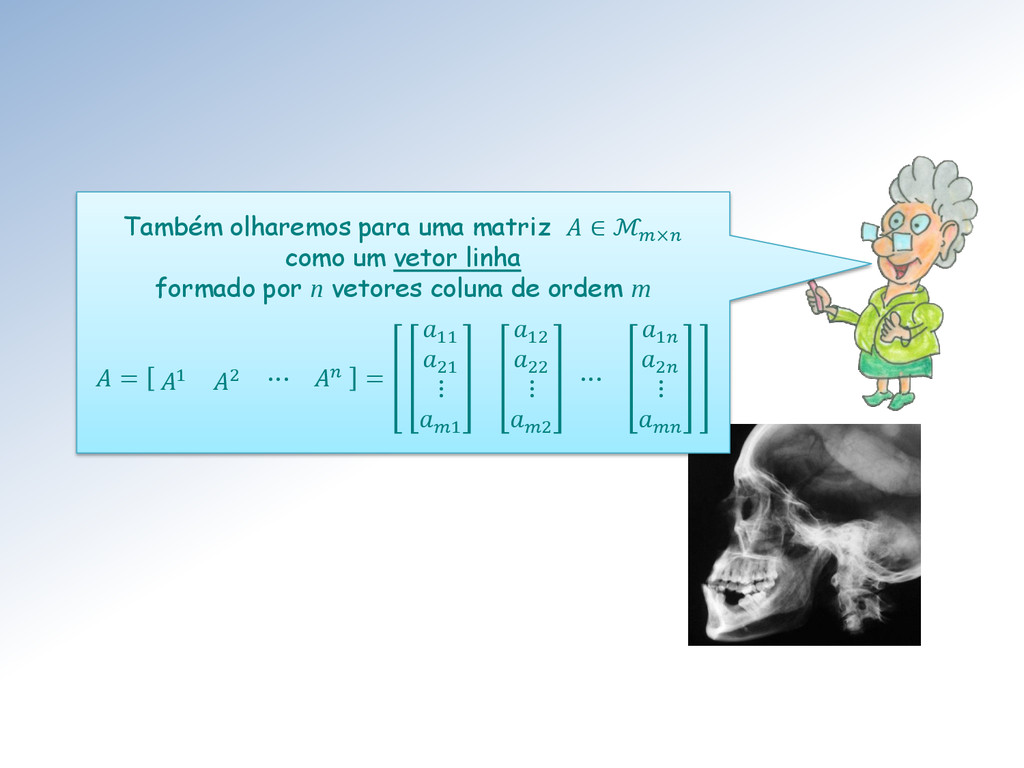
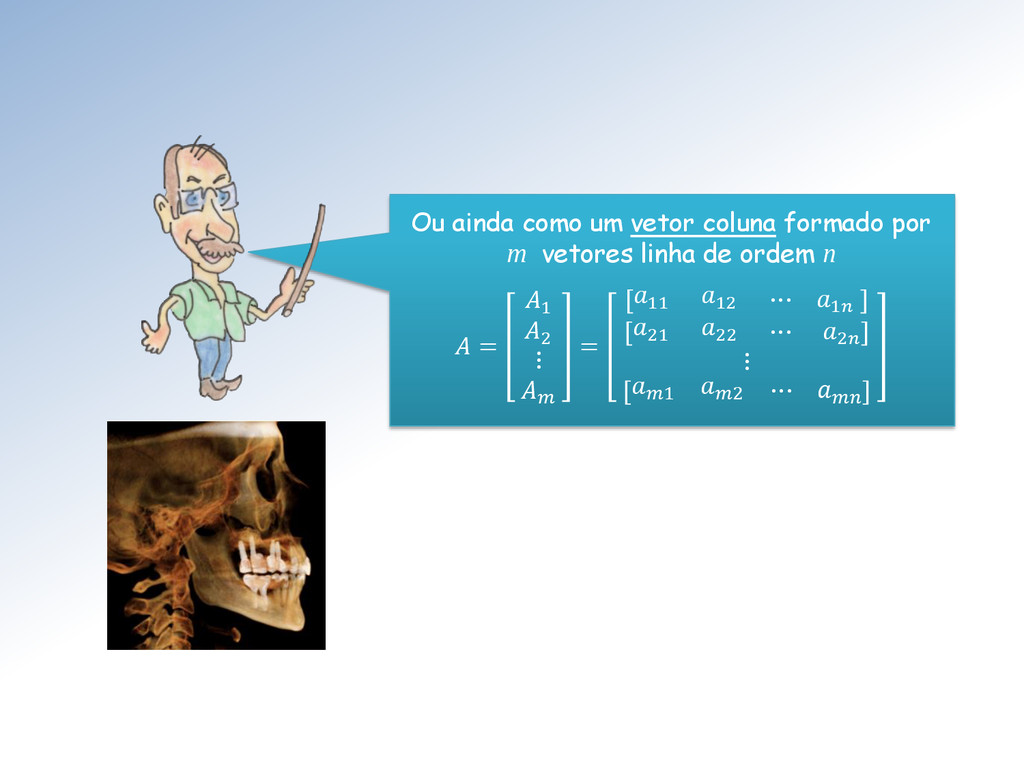
com = , o mesmo número de linhas e colunas. • Os vetores coluna de ordem m. Matrizes × 1, isto é, matrizes coluna de ordem m. • Os vetores linha de ordem n. Matrizes 1 × , isto é, matrizes linha de ordem n. Três tipos particulares de matrizes merecem destaque, relativamente à sua ordem × : Os ingredientes fundamentais da Álgebra linear computacional residem em ℳ× .
multiplicação de um número por uma matriz. • A multiplicação direta entre duas matrizes de mesma ordem. São muitas as operações possíveis entre matrizes. Já vimos duas. Uma terceira fornece o produto direto.
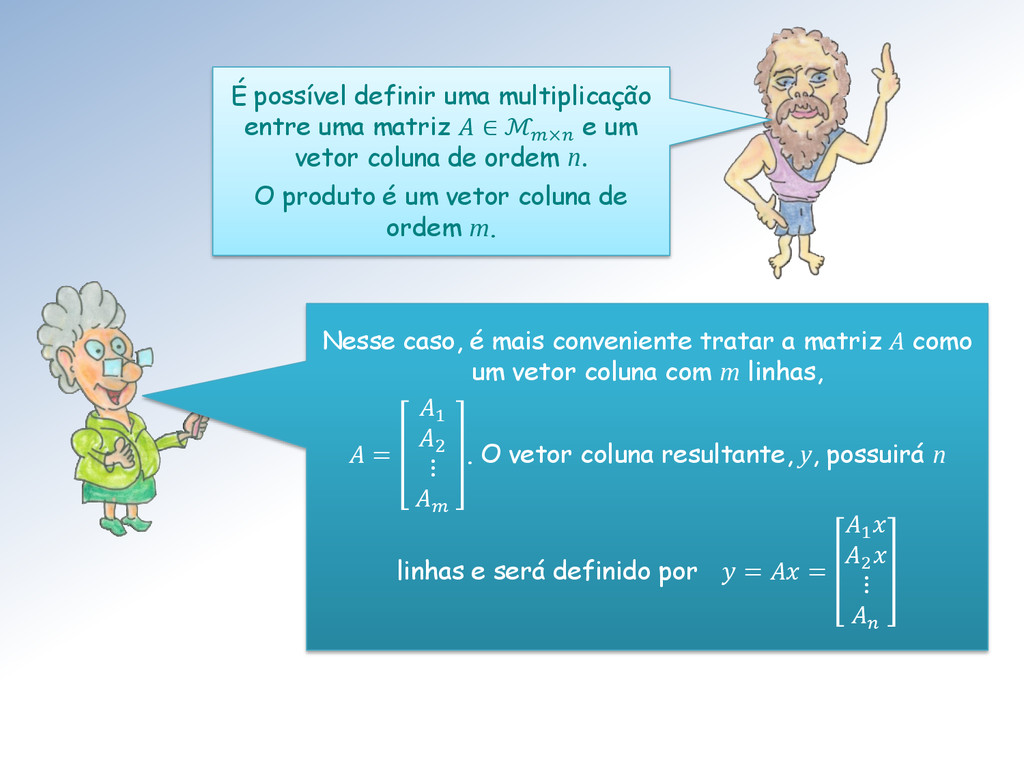
e um vetor coluna de ordem n. O produto é um vetor coluna de ordem m. Nesse caso, é mais conveniente tratar a matriz A como um vetor coluna com m linhas, = 1 2 ⋮ . O vetor coluna resultante, y, possuirá n linhas e será definido por = = 1 2 ⋮
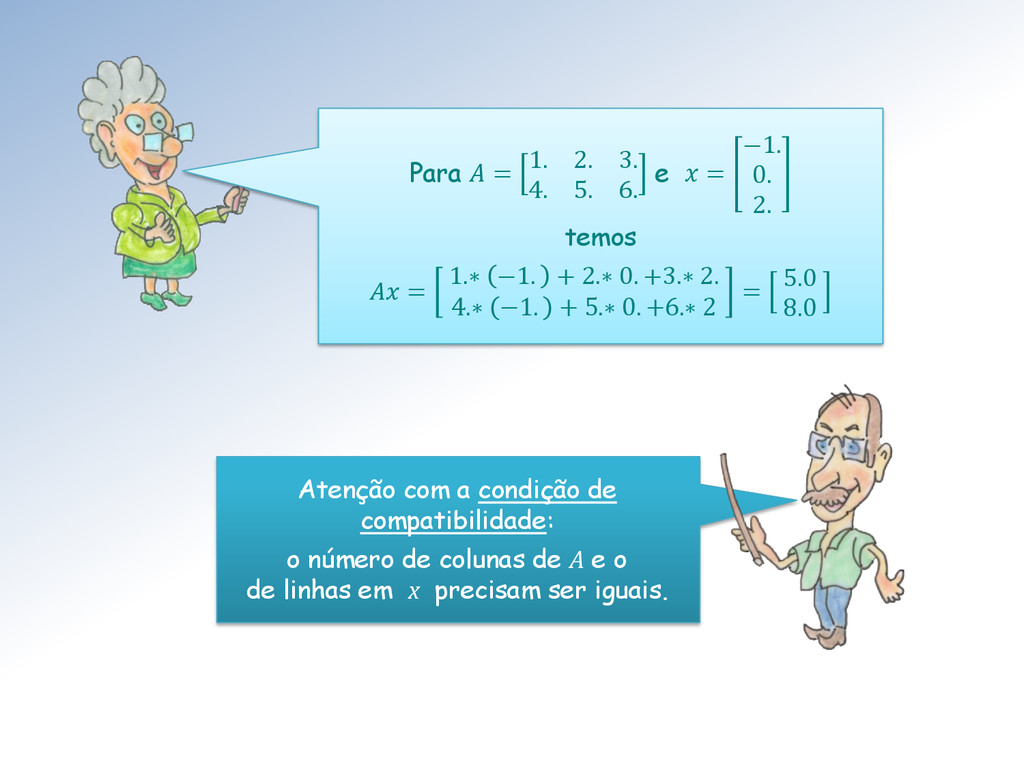
−1. 0. 2. temos = 1.∗ −1. + 2.∗ 0. +3.∗ 2. 4.∗ −1. + 5.∗ 0. +6.∗ 2 = 5.0 8.0 Atenção com a condição de compatibilidade: o número de colunas de A e o de linhas em x precisam ser iguais.
uma multiplicação entre matrizes A e B. É claro que temos que respeitar a condição de compatibilidade. Em outras palavras, o produto só estará definido quando ∈ ℳ× e ∈ ℳ× . O produto AB será uma matriz de ℳ×
mesmo é verdade para as matrizes triangular superior. Sim: • A soma de matrizes triangular inferior é uma matriz triangular inferior. • A múltipla de uma matriz triangular inferior não deixa de ser triangular inferior.
vetorial V, o conjunto constituído por todas as combinações lineares dos vetores de X é um subespaço de V. Ele é chamado de subespaço gerado por X. O subespaço gerado por X pode ser o próprio V.
linear com multiplicação herdada de ℱ(, ℝ); • O mesmo vale para , . É muito fácil conferir que ℱ(, ℝ) torna-se uma álgebra linear com a multiplicação assim definida. Dadas duas funções , ∈ ℱ(, ℝ) o produto ∙ ∈ ℱ(, ℝ) é a função definida para cada ∈ por ∙ = () ∙ ()
de um vetor, em espaços vetoriais abstratos é exigir o cumprimento de três condições satisfeitas pelas normas no plano e no espaço euclidianos. A 1ª é muito natural e intuitiva: o tamanho de um vetor não pode ser negativo; mais que isso, se o tamanho de um vetor é zero ele tem que ser o vetor nulo. Não importa que coisa é esse vetor. As outras duas envolvem as operações de espaços vetoriais: a escala e a soma. Confiram na próxima transparência.
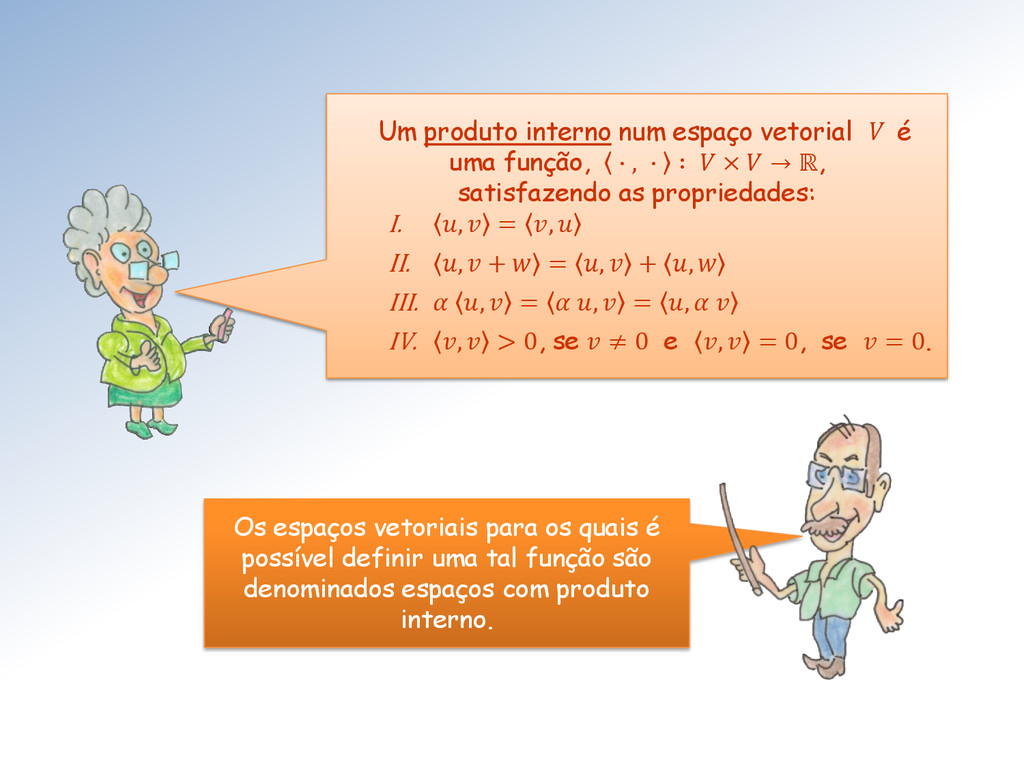
V é uma norma quando satisfaz: I. ≥ 0 e = 0 ⇒ = 0. II. = - a escala III. + ≤ + - a desigualdade triangular para , ∈ e α ∈ ℝ. Aqueles espaços vetoriais em que é possível definir uma norma são chamados espaços normados. Os espaços euclidianos são espaços normados (prove isto, Loirinha).
tal função são denominados espaços com produto interno. Um produto interno num espaço vetorial V é uma função, ∙ , ∙ ∶ × → ℝ, satisfazendo as propriedades: I. , = , II. , + = , + , III. , = , = , IV. , > 0, se ≠ 0 e , = 0, se = 0.
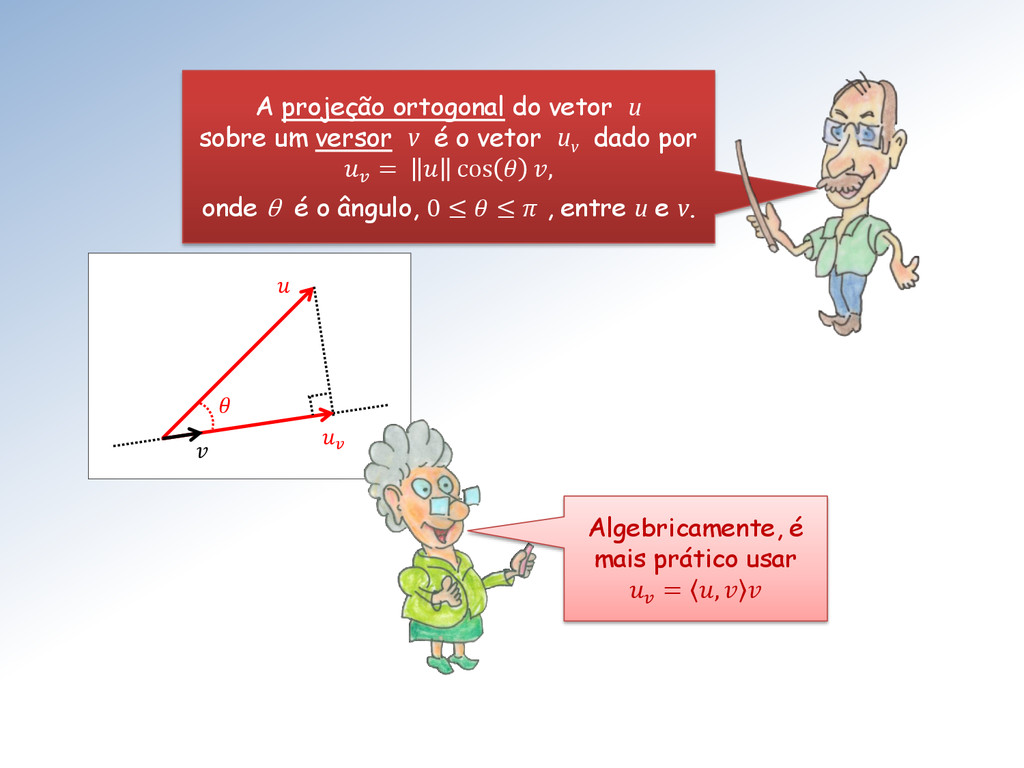
quando , = 0. O caso trivial é o vetor nulo, 0, ortogonal a todos os outros. E a projeção ortogonal de um vetor abstrato u sobre um vetor abstrato v é o vetor dado por = ,
nossa intuição euclidiana é preservada ao máximo. Espaços de Hilbert são espaços com produto interno onde toda sequência de Cauchy é convergente. É a preservação de outra característica fundamental do plano e espaço euclidianos.
• Os espaços de Sobolev 1, 0 1 , 2, etc, ambientes naturais para soluções de EDPs. Além dos espaços euclidianos de dimensão finita, é claro! Alguns exemplos importantíssimos de espaços de Hilbert (instâncias), são os seguintes:
com o conceito de estruturas algébricas, baseado essencialmente na teoria dos conjuntos. O representante, por excelência, desse modo de pensar abstrato é o grupo de matemáticos, na maioria franceses, conhecido sob o pseudônimo de Bourbaki.
são: Álgebra, Topologia, Funções de uma variável real, Espaços vetoriais topológicos, Integração, Àlgebra comutativa e Teoria espectral. As publicações do grupo talvez sejam o último trabalho com pretensões enciclopédicas na matemática... Elas iniciaram os “Elementos de Matemática” com ”Teoria dos Conjuntos”
de Leonardo da Vinci, em vingança ao fato dele desprezar os artistas. Segundo Platão artistas fazem cópias da cópia da realidade, que é o “mundo das ideias”. Tão platônicos quanto o próprio Platão.
Resolução de problemas • Heurística • Lógica • Aplicações Mestre, temos então um conflito enorme de interesses. Já vimos que esses conceitos são fundamentais para nosso curso!
esqueleto, que nos sustenta. Estruturas algébricas são entidades abstratas constituídas por um conjunto (ou mais), operações sobre seus elementos e regras para operar.
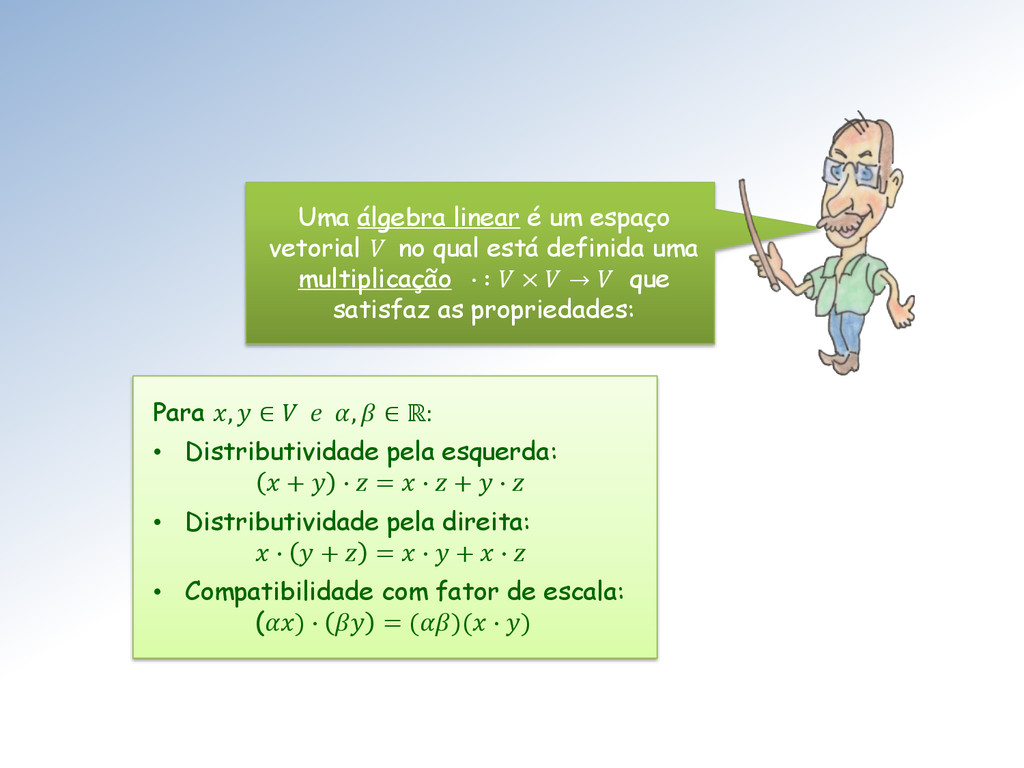
operação. As estruturas de anel e corpo, envolvem um conjunto com duas operações. Já a estrutura de álgebra linear um conjunto e três operações. Vamos entender primeiro a estrutura de grupo.
regra ⋆ ⋆ = ⋆ ⋆ , ∀ , , ∈ . 2. Existe um elemento privilegiado, ∈ , tal que ⋆ = , ∀ ∈ . 3. A cada elemento ∈ corresponde um elemento ∈ que satisfaz ⋆ = . O grupo G é comutativo ou abeliano quando: 4. Para , ∈ vale ⋆ = ⋆ . Um grupo ,⋆ é uma estrutura formada por um conjunto G e uma operação ⋆ ∶ × → , tais que:
do tipo: • Adição (+), o elemento privilegiado receberá o nome de elemento neutro será representado pelo zero (0), e será o oposto, −. • Multiplicação ( ∙ ), o elemento privilegiado receberá o nome de unidade ou identidade e será representado por (1, ), e será o inverso, −1. Nos exemplos ⋆ geralmente representará uma operação tipo adição ou multiplicação, para conjuntos G com os mais variados tipos de elementos.
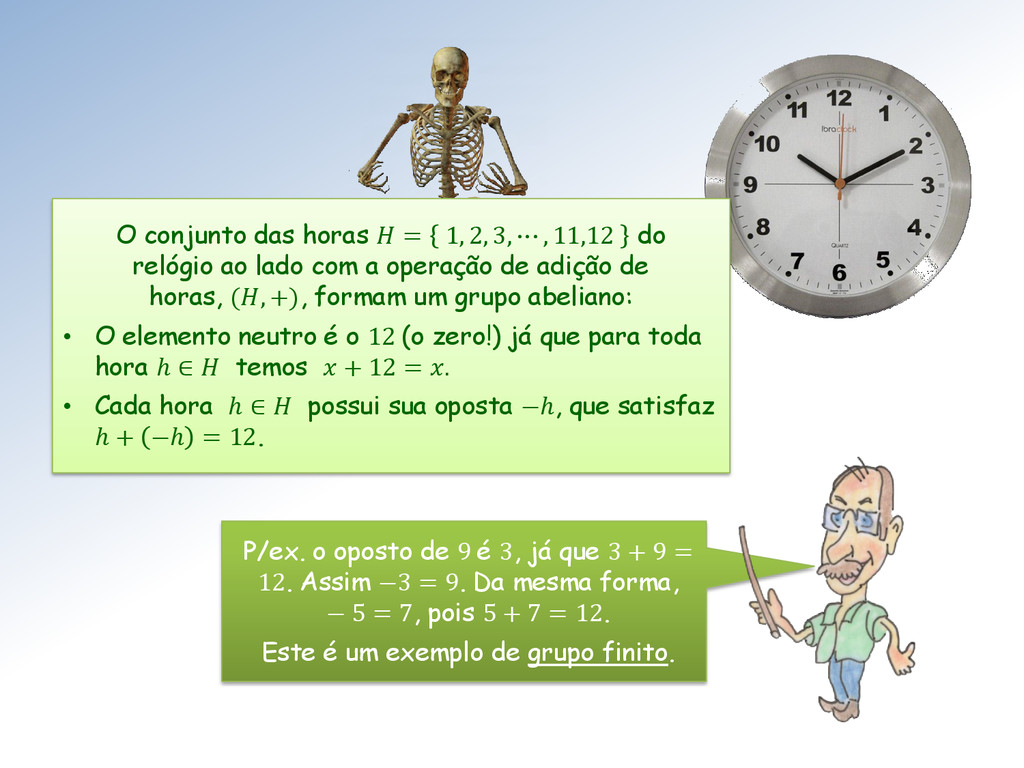
+ 9 = 12. Assim −3 = 9. Da mesma forma, − 5 = 7, pois 5 + 7 = 12. Este é um exemplo de grupo finito. O conjunto das horas = 1, 2, 3, ⋯ , 11,12 do relógio ao lado com a operação de adição de horas, (, +), formam um grupo abeliano: • O elemento neutro é o 12 (o zero!) já que para toda hora ℎ ∈ temos + 12 = . • Cada hora ℎ ∈ possui sua oposta −ℎ, que satisfaz ℎ + −ℎ = 12.
são grupos. Confira que ℚ, + também é um grupo. ℤ, + é um grupo abeliano. • O elemento neutro é o 0 já que para todo ∈ ℤ temos + 0 = . • Cada ∈ ℤ possui seu oposto −, que satisfaz + − = 0.
grupo abeliano. Idem para ℂ, + e ℂ∗ , ∙ . Lembrem-se ℚ∗ = ℚ\{0} ℚ∗, ∙ também é um grupo abeliano. • O elemento privilegiado é o 1 (elemento identidade), pois para todo ∈ ℚ∗ temos ∙ 1 = . • Cada ∈ ℚ∗ possui seu inverso −1, que satisfaz ∙ −1 = 1.
um conjunto K e duas operações: + ∶ × → e ∙ ∶ ∗ × ∗ → ∗ que tornam K e ∗ = {0} grupos abelianos para a adição e multiplicação (respectivamente) e, além disso, satisfazem: A distributividade da multiplicação sobre a adição: ∙ + = ∙ + ∙ , ∀, , ∈
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![O produto direto entre uma matriz = [ ] e](https://files.speakerdeck.com/presentations/0c45cc10515a0132c50c4696ef473345/slide_46.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![As funções contínuas em [0, 1] constituem um subespaço de](https://files.speakerdeck.com/presentations/0c45cc10515a0132c50c4696ef473345/slide_58.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}