Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
AWS DeepRacerで最適な行動・報酬関数を得る為の試行錯誤
Search
貞松政史
May 16, 2019
Technology
2.3k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
AWS DeepRacerで最適な行動・報酬関数を得る為の試行錯誤
2019/05/16 DeepRacer同好会 第二回オフライン勉強会@大阪 のセッションスライドです。
貞松政史
May 16, 2019
More Decks by 貞松政史
See All by 貞松政史
Amazon Forecast亡き今、我々がマネージドサービスに頼らず時系列予測を実行する方法
sadynitro
0
1.5k
今日のハイライトをシステマティックに
sadynitro
1
95
はじめてのレコメンド〜Amazon Personalizeを使った推薦システム超超超入門〜
sadynitro
2
2.8k
予知保全利用を目指した外観検査AIの開発 〜画像処理AIを用いた外観画像に対する異常検知〜
sadynitro
0
1.4k
20230904_GoogleCloudNext23_Recap_AI_ML
sadynitro
0
1k
Foundation Model全盛時代を生きるAI/MLエンジニアの生存戦略
sadynitro
0
1.1k
Amazon SageMakerが存在しない世界線 のAWS上で実現する機械学習基盤
sadynitro
0
330
Amazon SageMakerが存在しない世界線のAWS上で実現する機械学習基盤
sadynitro
0
2.2k
みんな大好き強化学習
sadynitro
0
1.4k
Other Decks in Technology
See All in Technology
NetBoxを利用した作業効率化の試み_NetDevNight4
tnoha
0
420
なぜ、あなたのエージェントは言うことを聞かないのか
segavvy
1
610
VPCセキュリティ対応の最新事情
nagisa53
2
350
実践が先生だった— 新卒サーバーエンジニア1年目のリアル
mixi_engineers
PRO
0
220
BigQuery を検索ソースとした AI Agent の作り方って 〇〇 通りあんねん
satohjohn
0
150
なぜ、あなたのAPIは使われないのか? AX時代の設計原則、ガードレール、運用体制
yokawasa
1
1.2k
新しい SLO が良い感じにハマっている話
z63d
4
1.9k
それでも、技術なブログを書く理由 #kichijojipm / Why I Still Write Tech Blogs Even Now
shinkufencer
0
1.5k
オートロックマンションなのに、各部屋は施錠なし!? 攻撃者が組織内ネットワークで大暴れする理由 / The Front Door Is Locked, but the Rooms Are Wide Open: Why Attackers Move Freely Inside Enterprise Networks
nttcom
0
680
PLaMo 3.0 Primeの事後学習
pfn
PRO
0
240
AI Agent を本番環境へ―― Microsoft Foundry × Azure Serverless で作る Enterprise-Ready な基盤
shibayan
PRO
1
1k
Claude Code並行開発環境の ムダ‧ムラ‧ムリを見直した話
muranakaaa
1
390
Featured
See All Featured
Why Your Marketing Sucks and What You Can Do About It - Sophie Logan
marketingsoph
0
340
Impact Scores and Hybrid Strategies: The future of link building
tamaranovitovic
0
350
The Limits of Empathy - UXLibs8
cassininazir
1
570
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
390
Design in an AI World
tapps
1
270
Mobile First: as difficult as doing things right
swwweet
225
10k
DBのスキルで生き残る技術 - AI時代におけるテーブル設計の勘所
soudai
PRO
67
56k
Code Review Best Practice
trishagee
74
20k
GraphQLとの向き合い方2022年版
quramy
50
15k
Bridging the Design Gap: How Collaborative Modelling removes blockers to flow between stakeholders and teams @FastFlow conf
baasie
0
620
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
650
Optimising Largest Contentful Paint
csswizardry
37
3.9k
Transcript
AWS DeepRacerで 最適な⾏動・報酬関数を得る為の試⾏錯誤 クラスメソッド株式会社 データインテグレーション部 2019.5.16 DeepRacer同好会 第⼆回オフライン勉強会@⼤阪 貞松 政史
1
2 本⽇のハッシュタグ #AWSDeepRacerJP
3 ⾃⼰紹介 貞松 政史 (サダマツ マサシ) @sady_nitro データインテグレーション部 (DI部) 開発チーム
岡⼭オフィス勤務 データ分析基盤開発 某コーヒー関連 SageMaker Lambda ⽒名 所属 近況 好きなAWS サービス
4 本セッションから得てほしいこと DeepRacer 楽しい︕
5 本セッションから得てほしいこと DeepRacerのAction設定どうしたら良い︖ DeepRacerの報酬関数設計どうしたら良い︖ この⼿の悩みを解決する⼿がかりに
6 本セッションで話さないこと 強化学習の⼿法(アルゴリズム)についての詳細 DeepRacerの実機を⽤いた開発
7 お品書き DeepRacerコンソールを⽤いた開発 DeepRacerのAction設定 DeepRacerの報酬関数設計 1 2 3
8 DeepRacerコンソールを⽤いた開発
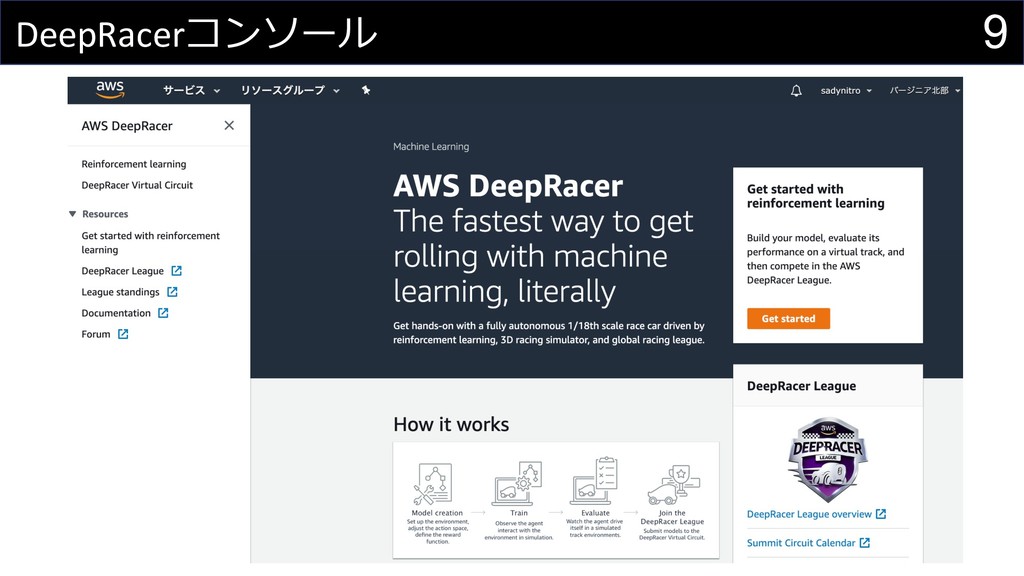
9 DeepRacerコンソール
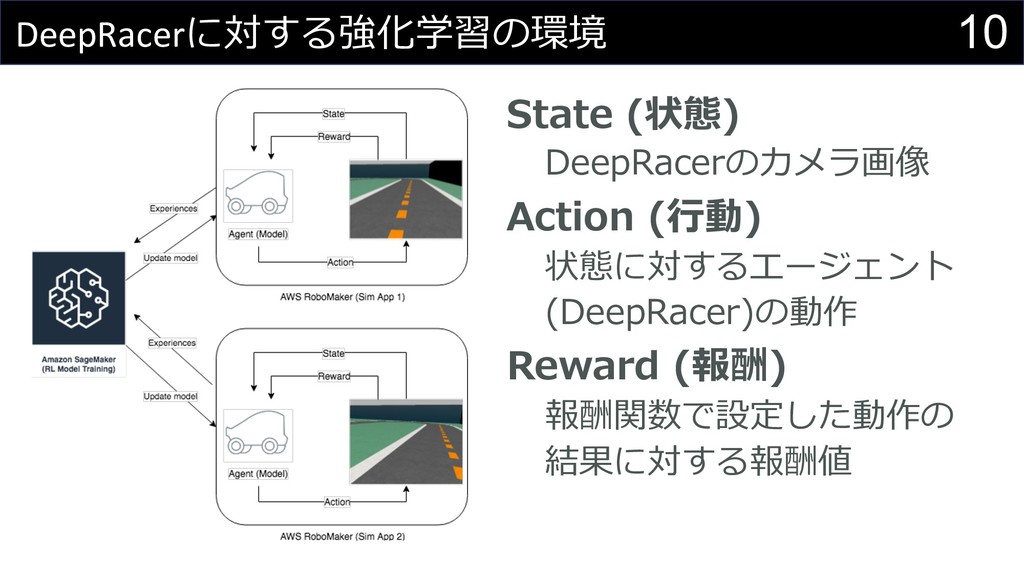
10 DeepRacerに対する強化学習の環境 State (状態) DeepRacerのカメラ画像 Action (⾏動) 状態に対するエージェント (DeepRacer)の動作 Reward
(報酬) 報酬関数で設定した動作の 結果に対する報酬値
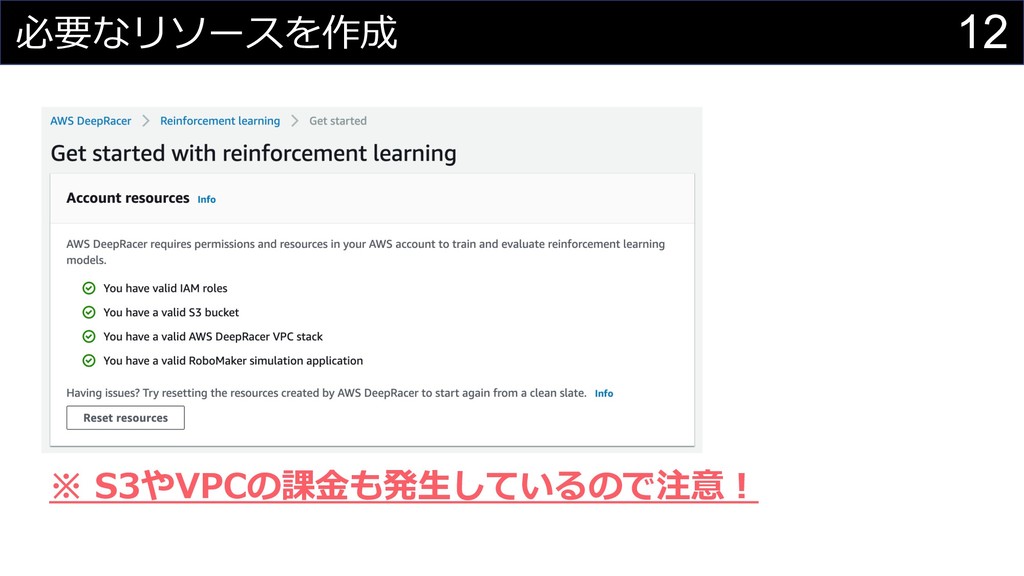
11 DeepRacerコンソールを⽤いた開発の流れ 必要なAWSリソースを作成 学習モデルを作成・学習実⾏ 学習済みモデルの評価・デプロイ
12 必要なリソースを作成 ※ S3やVPCの課⾦も発⽣しているので注意︕
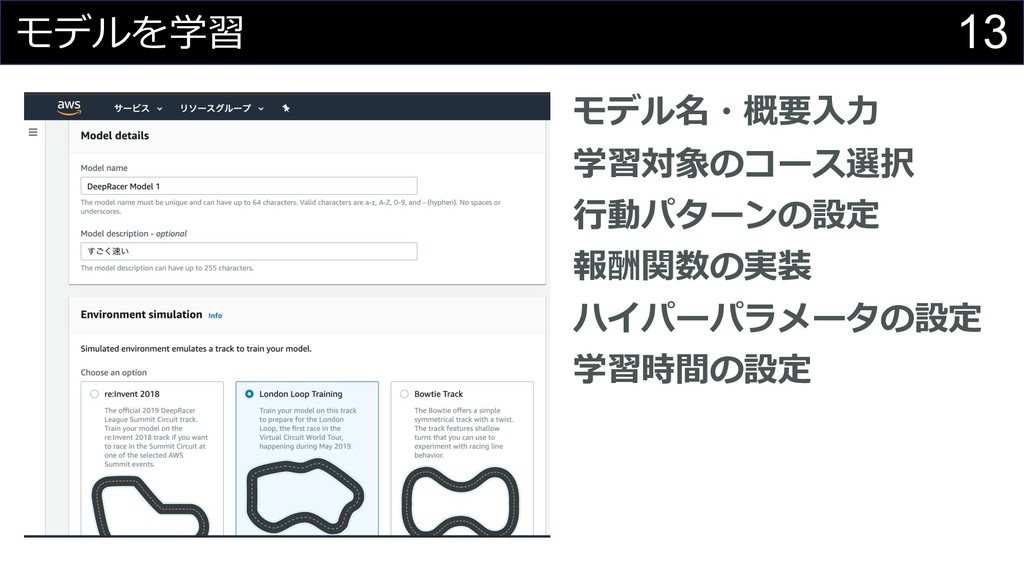
13 モデルを学習 モデル名・概要⼊⼒ 学習対象のコース選択 ⾏動パターンの設定 報酬関数の実装 ハイパーパラメータの設定 学習時間の設定
14 トレーニングの実⾏ 時間毎の累積報酬 DeepRacerのカメラ画像 (シミュレーター)
15 学習済みモデルを評価 学習済みモデルで3〜5回トライアルを⾏う ⁻ Time : 1回のトライアルでかかった時間 ⁻ Trial result
: 100%ならコース1周完⾛
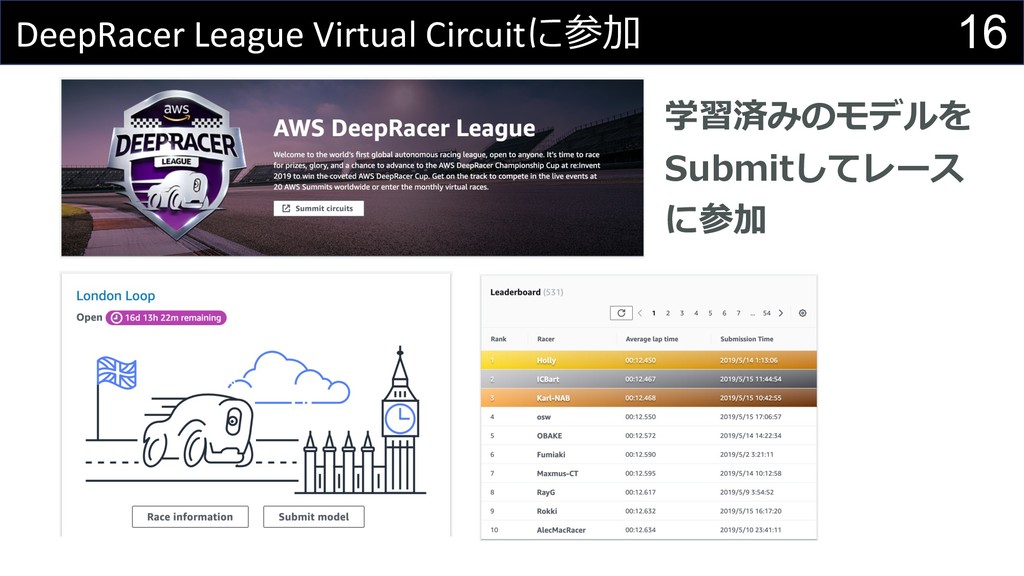
16 DeepRacer League Virtual Circuitに参加 学習済みのモデルを Submitしてレース に参加
17 参考ブログエントリー その1 https://dev.classmethod.jp/cloud/aws/aws-deepracer-virtual-circuit-join/
18 DeepRacerのAction設定
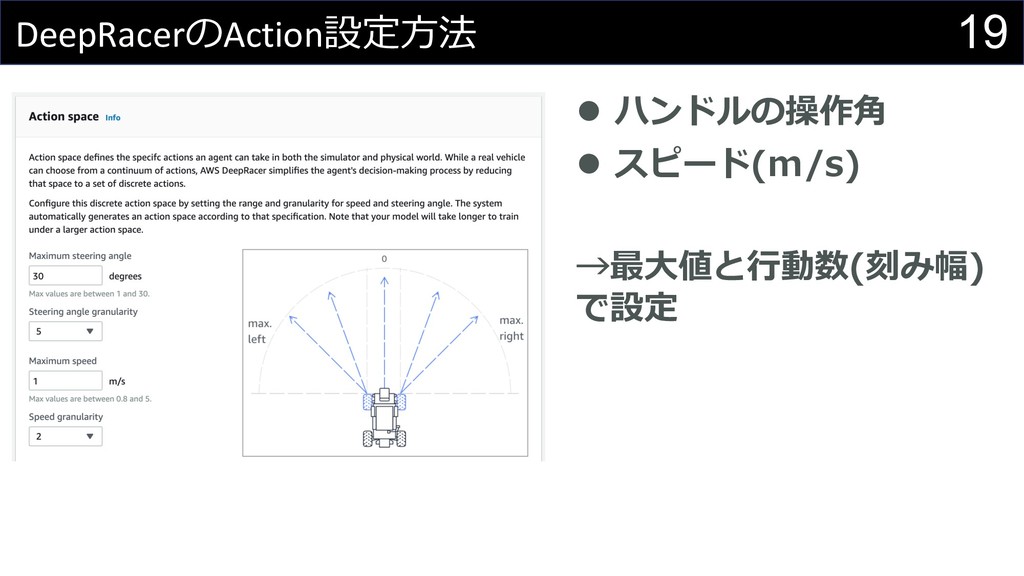
19 DeepRacerのAction設定⽅法 l ハンドルの操作⾓ l スピード(m/s) →最⼤値と⾏動数(刻み幅) で設定
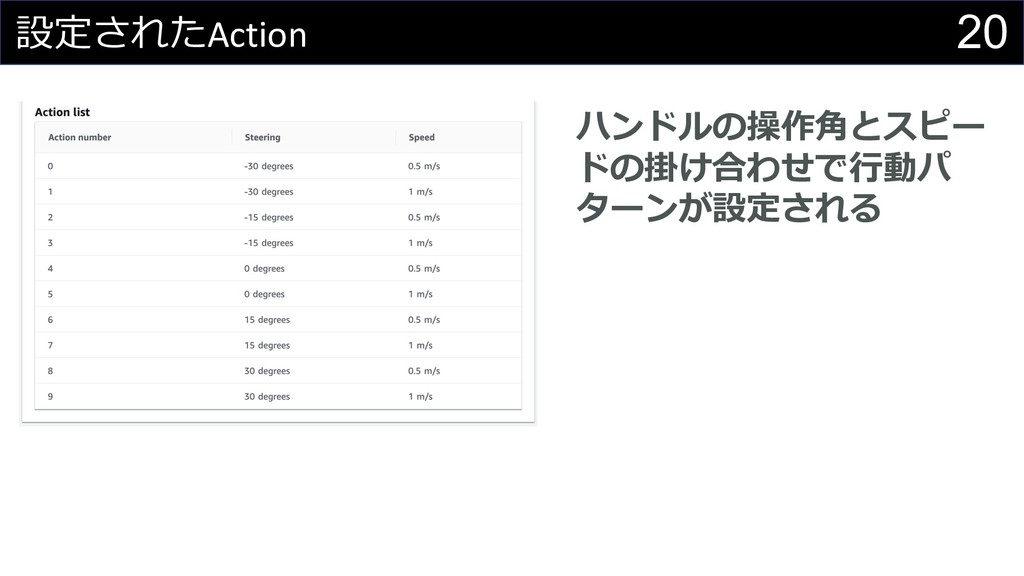
20 設定されたAction ハンドルの操作⾓とスピー ドの掛け合わせで⾏動パ ターンが設定される
21 Actionを設定する上での注意点 ⾏動パターンを増やし過ぎると学習に時間が掛かる 学習ジョブのClone時は元のActionを変更できない コースの特性に合わせて設定が必要 報酬関数の設計とトータルで考える必要がある
22 DeepRacerの報酬関数設定
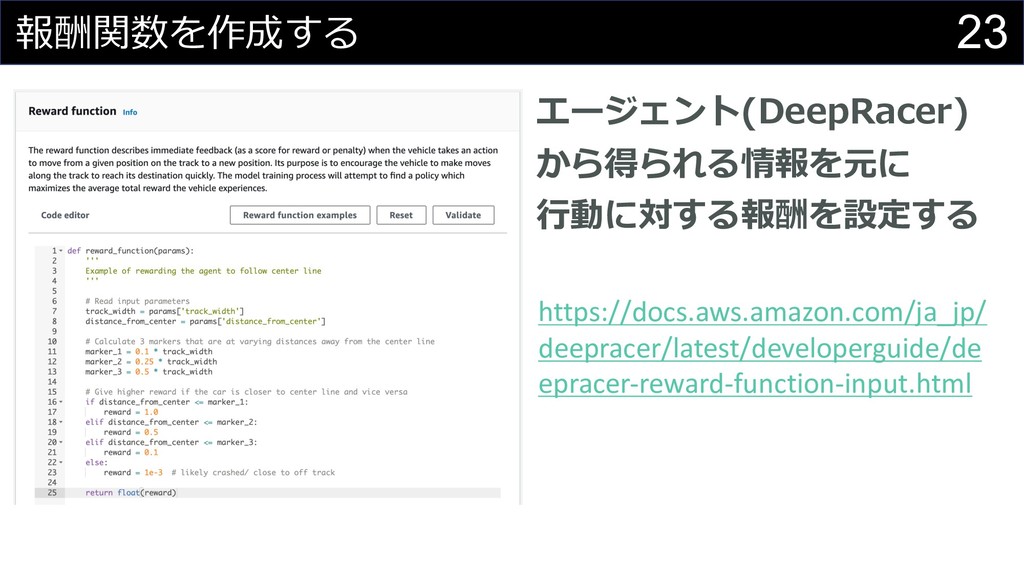
23 報酬関数を作成する エージェント(DeepRacer) から得られる情報を元に ⾏動に対する報酬を設定する https://docs.aws.amazon.com/ja_jp/ deepracer/latest/developerguide/de epracer-reward-function-input.html
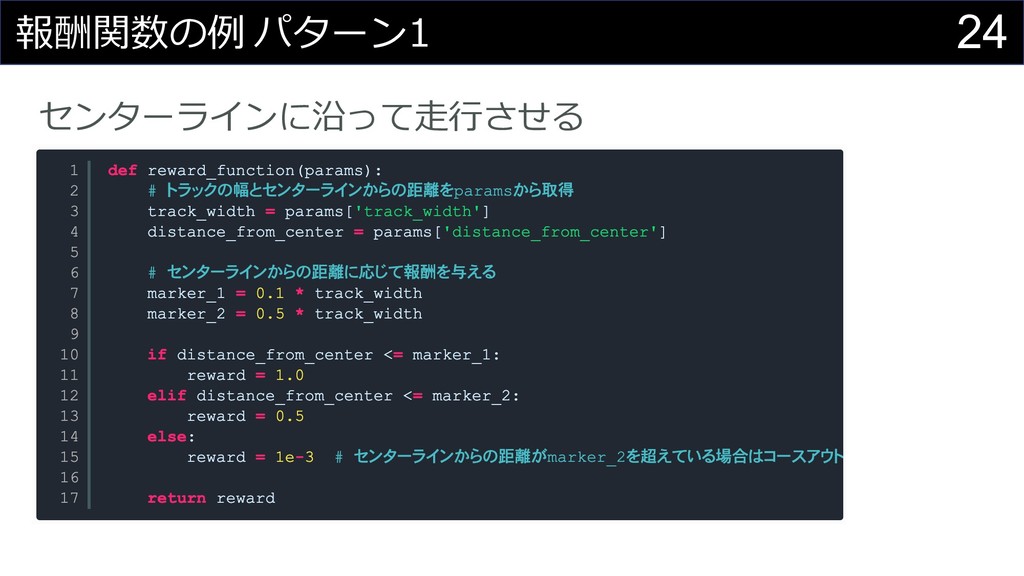
24 報酬関数の例 パターン1 センターラインに沿って⾛⾏させる
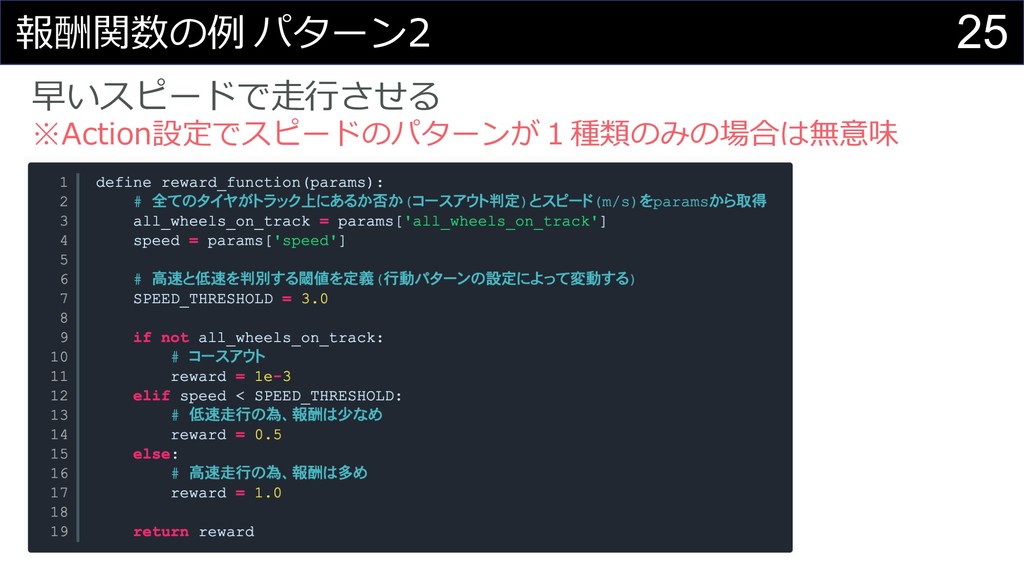
25 報酬関数の例 パターン2 早いスピードで⾛⾏させる ※Action設定でスピードのパターンが1種類のみの場合は無意味
26 報酬関数の例 パターン3 急ハンドルやジグザグ⾛⾏を抑制する
27 参考ブログエントリー その2 https://dev.classmethod.jp/machine-learning/aws-deepracer-pattern-of- reward-function/
28 報酬関数を実装する際のポイント コースの特徴を捉える 適切なActionの設定を⾒極める まずは1周完⾛できるモデルになるように 報酬関数を設計する
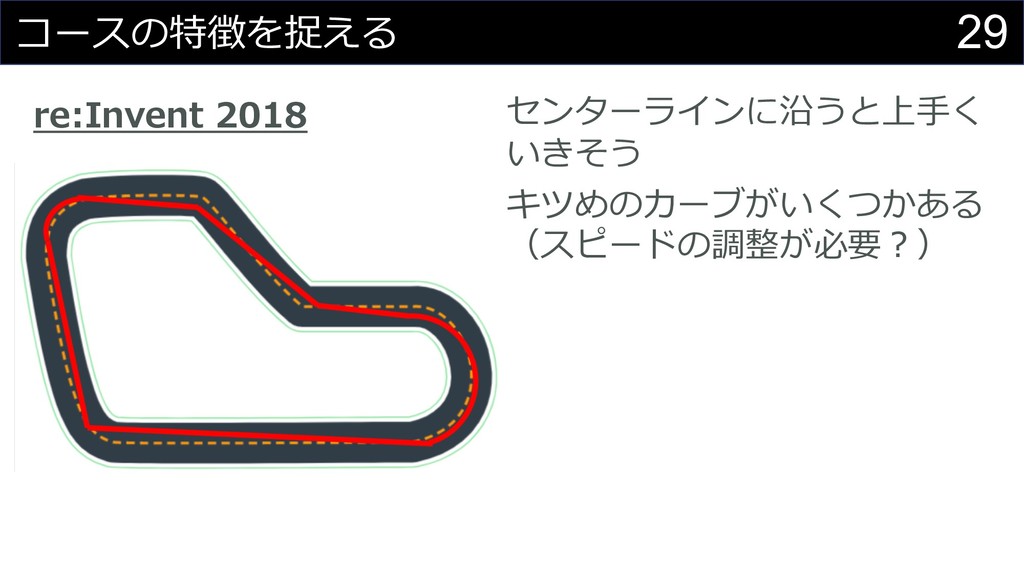
29 コースの特徴を捉える センターラインに沿うと上⼿く いきそう キツめのカーブがいくつかある (スピードの調整が必要︖) re:Invent 2018
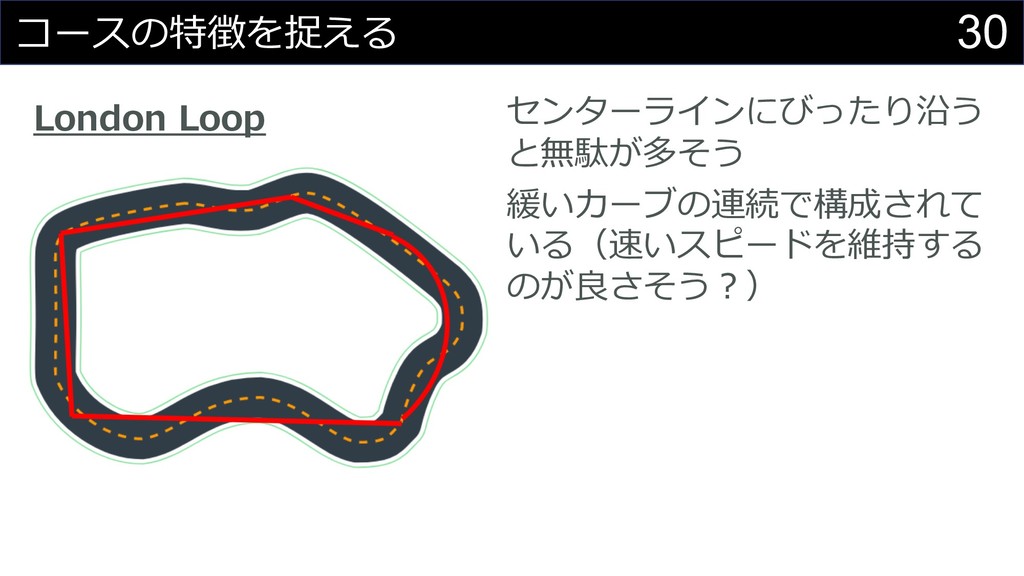
30 コースの特徴を捉える London Loop センターラインにびったり沿う と無駄が多そう 緩いカーブの連続で構成されて いる(速いスピードを維持する のが良さそう︖)
31 適切なAction設定を⾒極める コースの特徴や実際の動作・ログを⾒て Actionを設定する 例) スピードはトップスピード(5m/s)のみでOK ハンドル操作は-30°〜30°まで取らないと曲がりきれない etc…
32 まずは1周完⾛ 完⾛できなければ記録なしになる タイムを縮める以前の問題 all_wheels_on_track(コースアウト判定)や distance_from_center(中央線からの距離)など
33 さらなる⼯夫 取得したパラメータにする判定を厳しくする (もしくは緩くする) 条件を組み合わせる ハイパーパラメータを調整する(最後の⼿段) https://github.com/Unity-Technologies/ml- agents/blob/master/docs/best-practices-ppo.md
34 実際にモデルの学習を繰り返してわかったこと London loopをひたすら回した結果 • センターラインにびったり張り付いても速くない • 意外とフルスロットルでいける • 報酬関数は複雑なほど良いわけでは無い
• 最終的にカリッカリにタイム短縮を狙うならstepsや progressの考慮が必要…︖ • さらにカリッカリにチューニングする場合はハイパーパ ラメータの調整も⼊ってくる…︖
35 デモ的なもの
36 ⽣まれたてのDeepRacer
37 デフォルト設定で学習
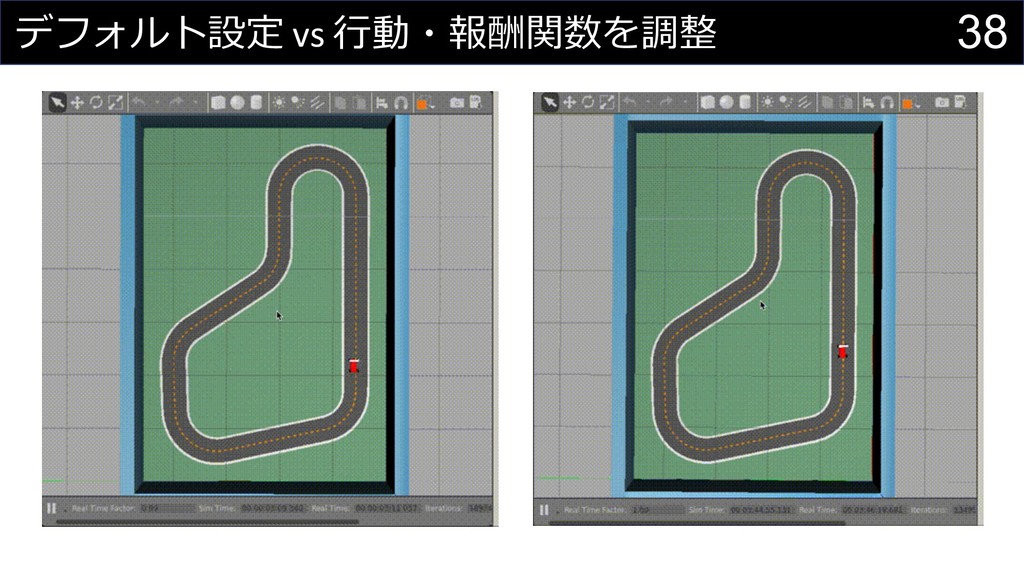
38 デフォルト設定 vs ⾏動・報酬関数を調整
39 まとめ
40 まとめ DeepRacerコンソールを⽤いた開発 ⾏動パターンの設定⽅法と注意点 報酬関数の設計 実装パターンの例 実装する際のポイント 実践してわかったこと
41 DeepRacer 楽しい︕
None
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}