Y. Akimoto, S. Shirakawa, N. Yoshinari, K. Uchida, S. Saito, and K. Nishida, The 36th International Conference on Machine Learning (ICML2019) 2019.07.21|ICLR/ICML2019読み会@DeNA 斉藤 翔汰(@argv_sat184) スキルアップAI株式会社 / 横浜国立大学大学院 博士後期課程1年
Shota Saito, and Kouhei Nishida: Adaptive Stochastic Natural Gradient Method for One-Shot Neural Architecture Search, Proceedings of the 36th International Conference on Machine Learning (ICML), Vol. 97 of PMLR, pp. 171-180 (2019). n Paper http://proceedings.mlr.press/v97/akimoto19a.html n Video https://icml.cc/Conferences/2019/ScheduleMultitrack?event= 4688 n Code(PyTorch) https://github.com/shirakawas/ASNG-NAS 3
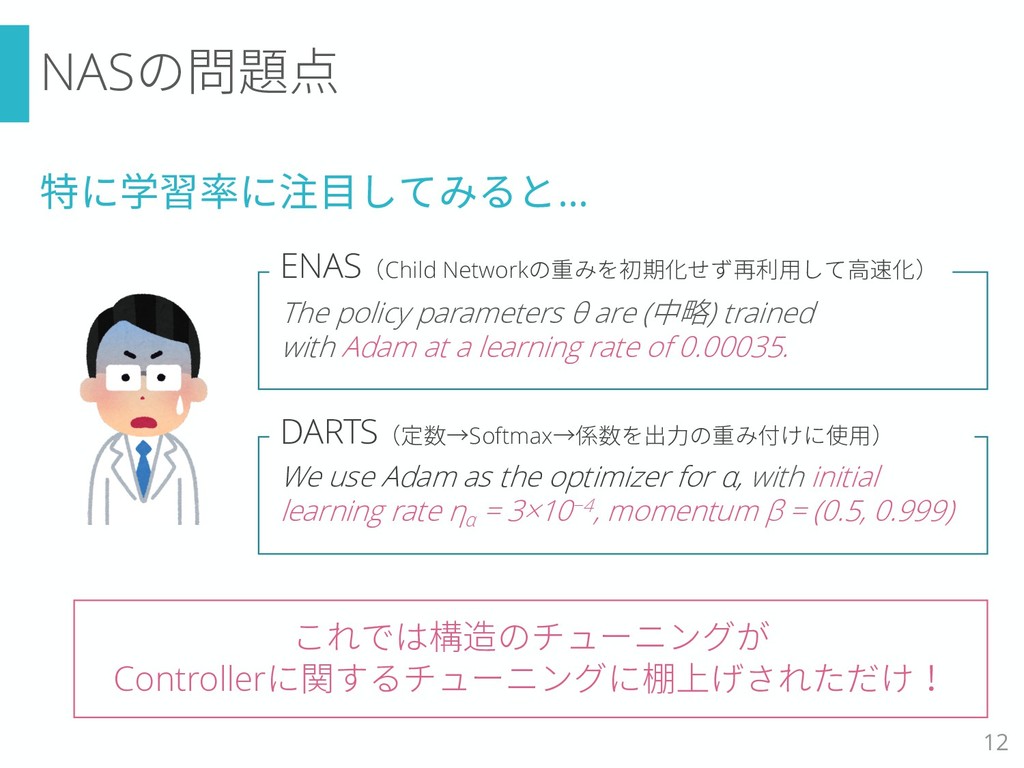
with Adam at a learning rate of 0.00035. We use Adam as the optimizer for α, with initial learning rate ηα = 3×10−4, momentum β = (0.5, 0.999) ENAS(Child Networkの重みを初期化せず再利用して高速化) DARTS(定数→Softmax→係数を出力の重み付けに使用) これでは構造のチューニングが Controllerに関するチューニングに棚上げされただけ!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![感想 「単目的」NASはあらかた収束? n 最近は精度や損失のみを目的関数においた 単目的NASは収束気味(?) n MnasNet[Tan et al., CVPR2019]を契機に戦場が](https://files.speakerdeck.com/presentations/ee8b0a54e0ae46c6a37cdcaa7bda729e/slide_22.jpg){kind=link}