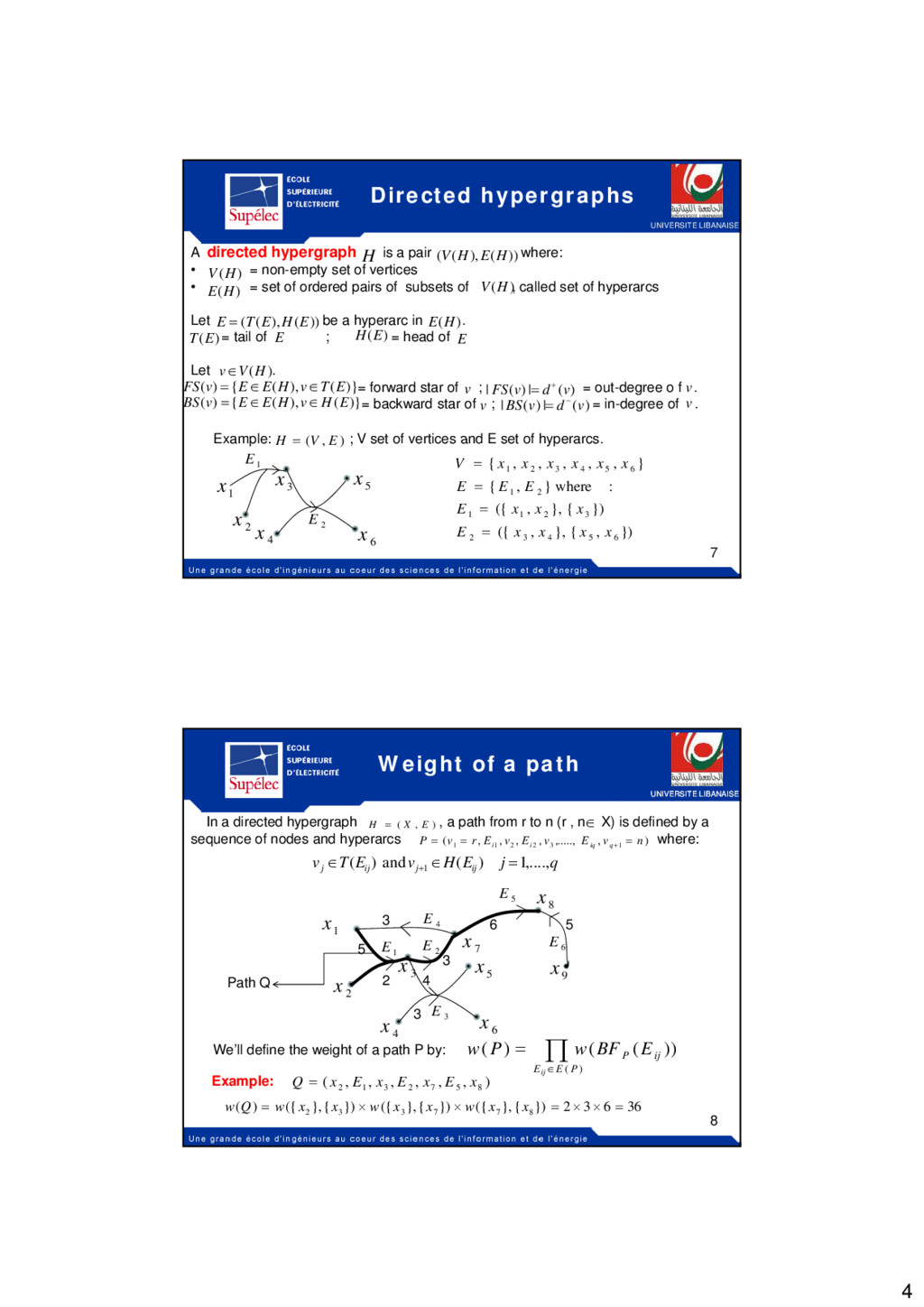
( H E H V ) (H V ) (H E ) (H V A directed hypergraph is a pair where: • = non-empty set of vertices • = set of ordered pairs of subsets of , called set of hyperarcs Let be a hyperarc in . = tail of ; = head of Let . = forward star of ; = out-degree o f . = backward star of ; = in-degree of . ) ( E V H Example: ; V set of vertices and E set of hyperarcs )) ( ), ( ( E H E T E ) (H E ) (E T E ) (E H E ) (H V v )} ( ), ( { ) ( E T v H E E v FS v )} ( ), ( { ) ( E H v H E E v BS v ) ( | ) ( | v d v FS v ) ( | ) ( | v d v BS v ) , ( E V H 2 x 3 x 4 x 5 x 6 x 1 E 2 E }) , { }, , ({ }) { }, , ({ : where } , { } , , , , , { 6 5 4 3 2 3 2 1 1 2 1 6 5 4 3 2 1 x x x x E x x x E E E E x x x x x x V 1 x Example: ; V set of vertices and E set of hyperarcs. 7 Weight of a path UNIVERSITE LIBANAISE UNIVERSITE LIBANAISE ) , ( E X H ) , ,....., , , , , ( 1 3 2 2 1 1 n v E v E v E r v P q iq i i q j E H v E T v ij j ij j ,...., 1 ) ( and ) ( 1 In a directed hypergraph , a path from r to n (r , n X) is defined by a sequence of nodes and hyperarcs where: 1 x 2 x 3 x 5 x 7 x 8 x 9 x 1 E 2 E E 4 E 5 E 6 E 3 2 5 3 6 5 4 Path Q q j ij j ij j , , ) ( ) ( 1 4 x 6 x 3 E 3 We’ll define the weight of a path P by: ) ( )) ( ( ) ( P E E ij P ij E BF w P w Example: 36 6 3 2 }) { }, ({ }) { }, ({ }) { }, ({ ) ( 8 7 7 3 3 2 x x w x x w x x w Q w ) , , , , , , ( 8 5 7 2 3 1 2 x E x E x E x Q 8
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}