Share
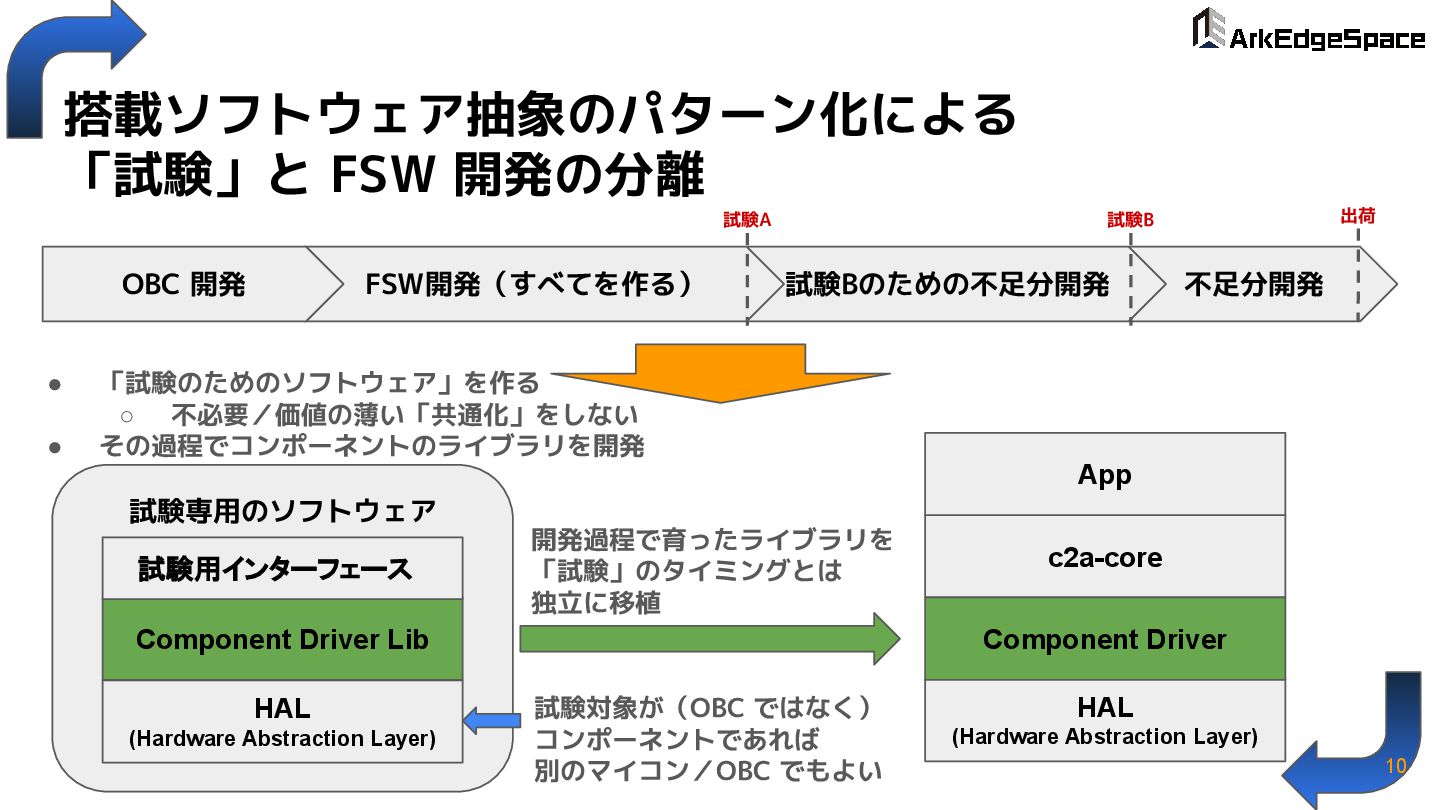
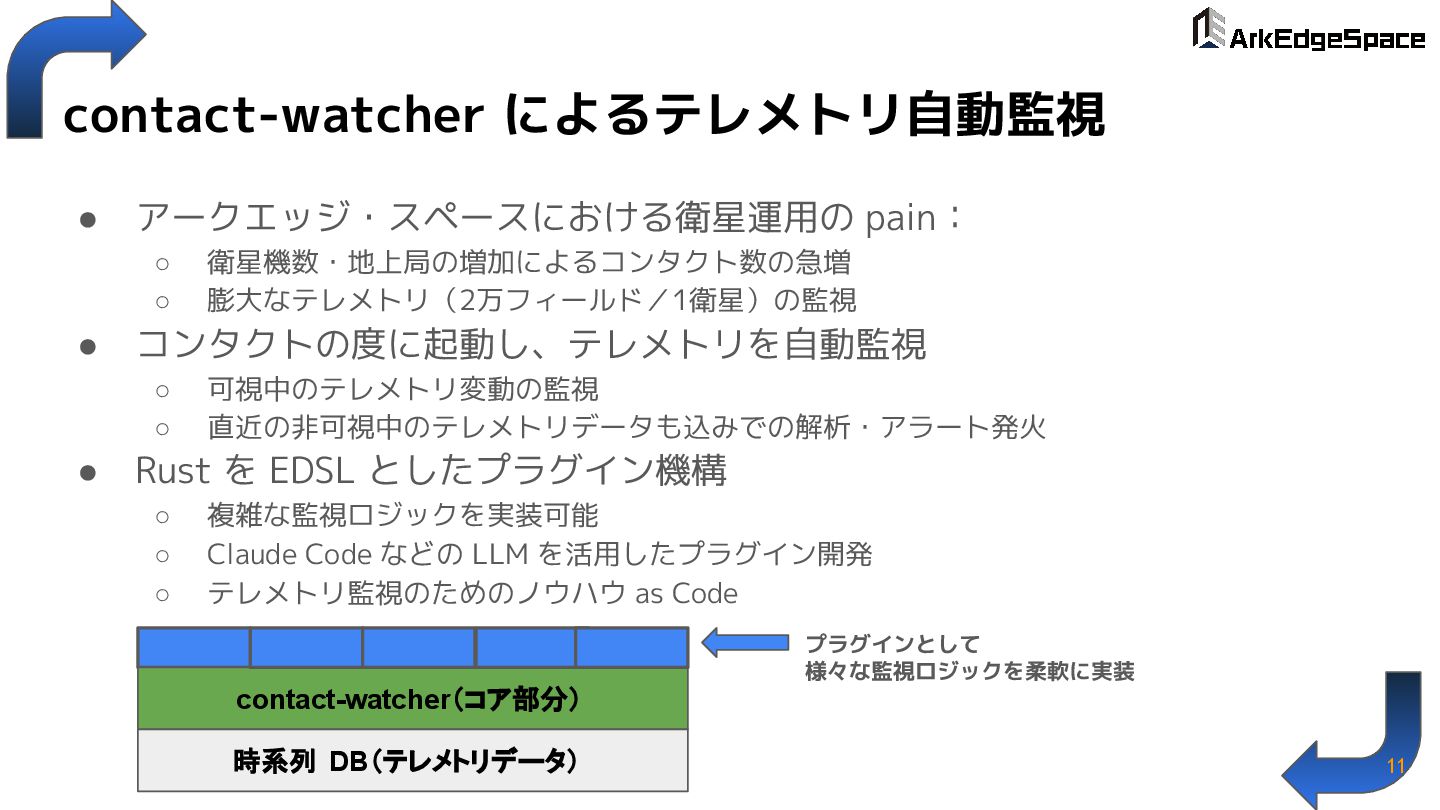
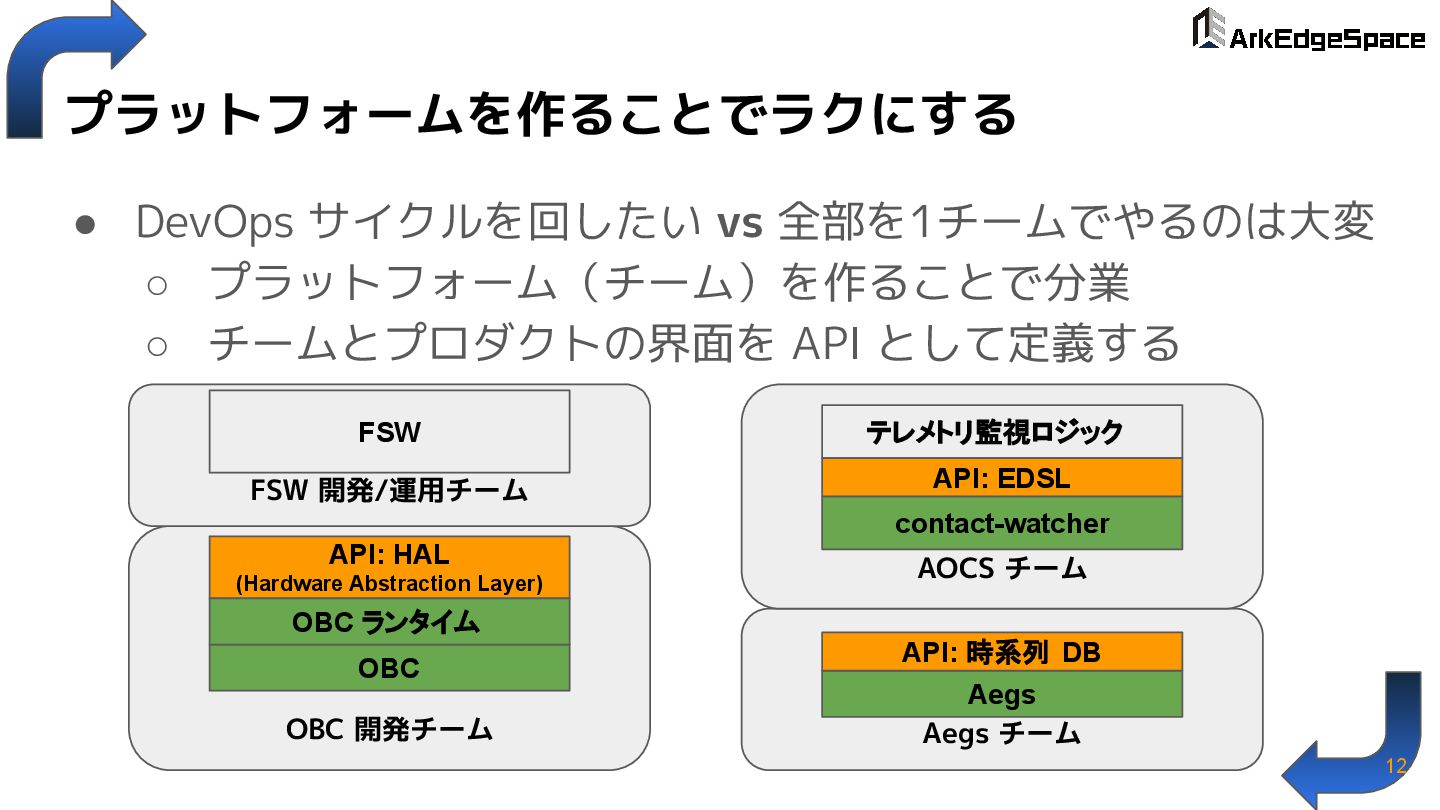
第69回宇宙科学技術連合講演会 11/25(1日目) OS-39 超小型衛星で切り開くビジネスと将来展望 (1)1A05 にて発表した、 『同時複数機開発・運用のDevOpsサイクル高速化のための取り組み 』のスライドです。
{kind=link}
![開発チームと運用チームの(よくある)分断 2 画像出典: AWS re:Invent 2019 [REPEAT 1] Amazon's approach](https://files.speakerdeck.com/presentations/718b3367f49449ecbdfb8d4c6946b4ee/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![継続的・加速度的成長のためのフィードバックループ 14 画像出典: AWS re:Invent 2019 [REPEAT 1] Amazon's approach](https://files.speakerdeck.com/presentations/718b3367f49449ecbdfb8d4c6946b4ee/slide_13.jpg){kind=link}