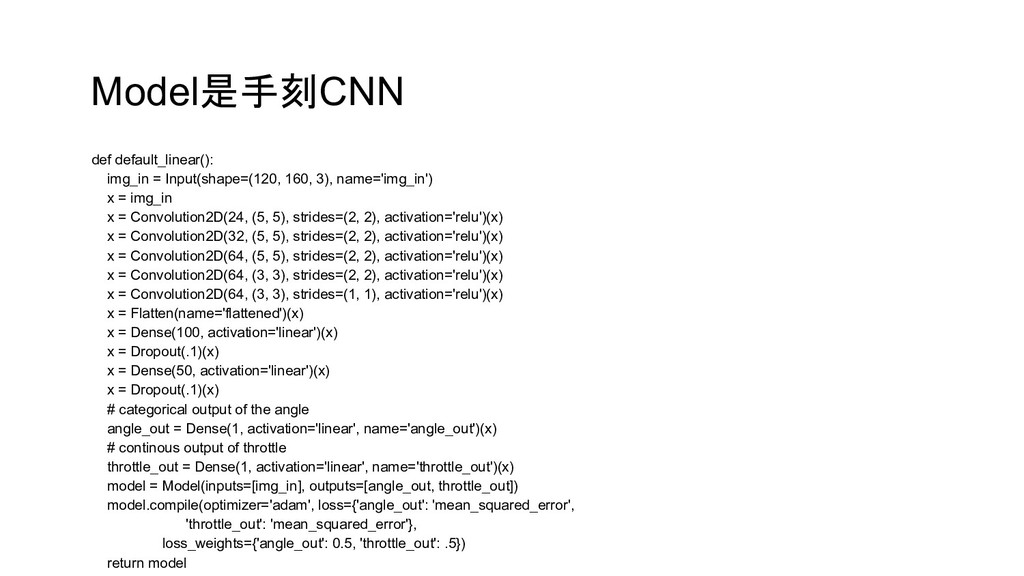
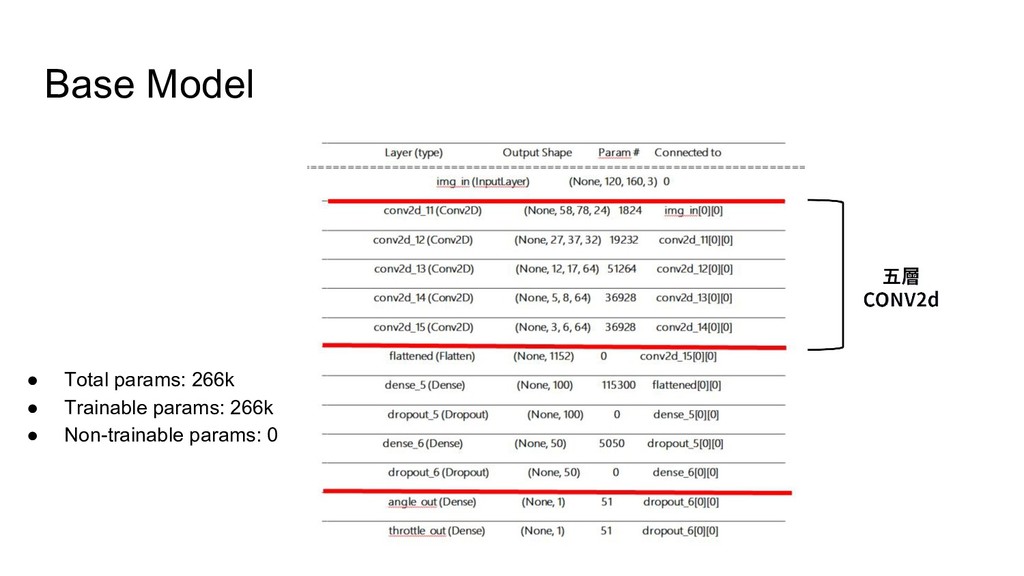
= img_in x = Convolution2D(24, (5, 5), strides=(2, 2), activation='relu')(x) x = Convolution2D(32, (5, 5), strides=(2, 2), activation='relu')(x) x = Convolution2D(64, (5, 5), strides=(2, 2), activation='relu')(x) x = Convolution2D(64, (3, 3), strides=(2, 2), activation='relu')(x) x = Convolution2D(64, (3, 3), strides=(1, 1), activation='relu')(x) x = Flatten(name='flattened')(x) x = Dense(100, activation='linear')(x) x = Dropout(.1)(x) x = Dense(50, activation='linear')(x) x = Dropout(.1)(x) # categorical output of the angle angle_out = Dense(1, activation='linear', name='angle_out')(x) # continous output of throttle throttle_out = Dense(1, activation='linear', name='throttle_out')(x) model = Model(inputs=[img_in], outputs=[angle_out, throttle_out]) model.compile(optimizer='adam', loss={'angle_out': 'mean_squared_error', 'throttle_out': 'mean_squared_error'}, loss_weights={'angle_out': 0.5, 'throttle_out': .5}) return model
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Reference 1. [nVIDIA Paper] https://devblogs.nvidia.com/deep-learning-self-driving-cars/ 2. [Donkey Car 官網] http://www.donkeycar.com/](https://files.speakerdeck.com/presentations/fd65e372b53d498583b7fac98ef7eac8/slide_82.jpg){kind=link}
{kind=link}