(ground, veg, buildings, powerlines) • Effective noise removal – filter for re-classification, delete entirely • 3D feature extraction, use cross-profile tool to define any object • QC tools for XYZ height adjustment, point cloud decimation • Global Mapper extension for advanced 3D point cloud processing
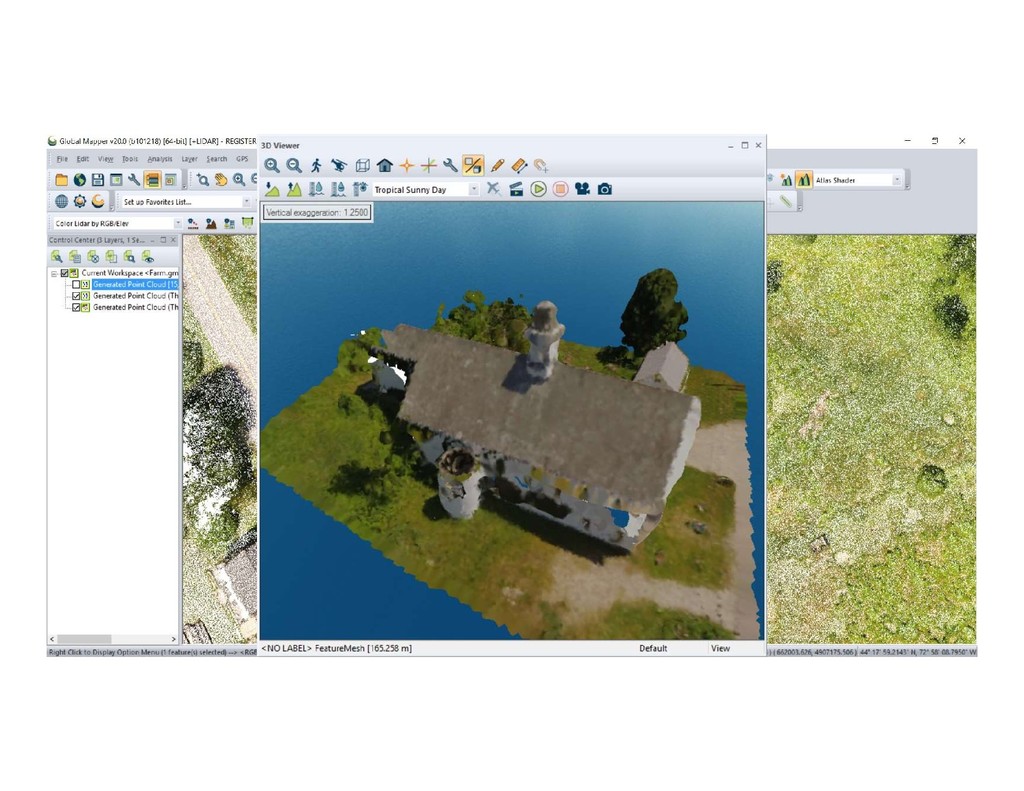
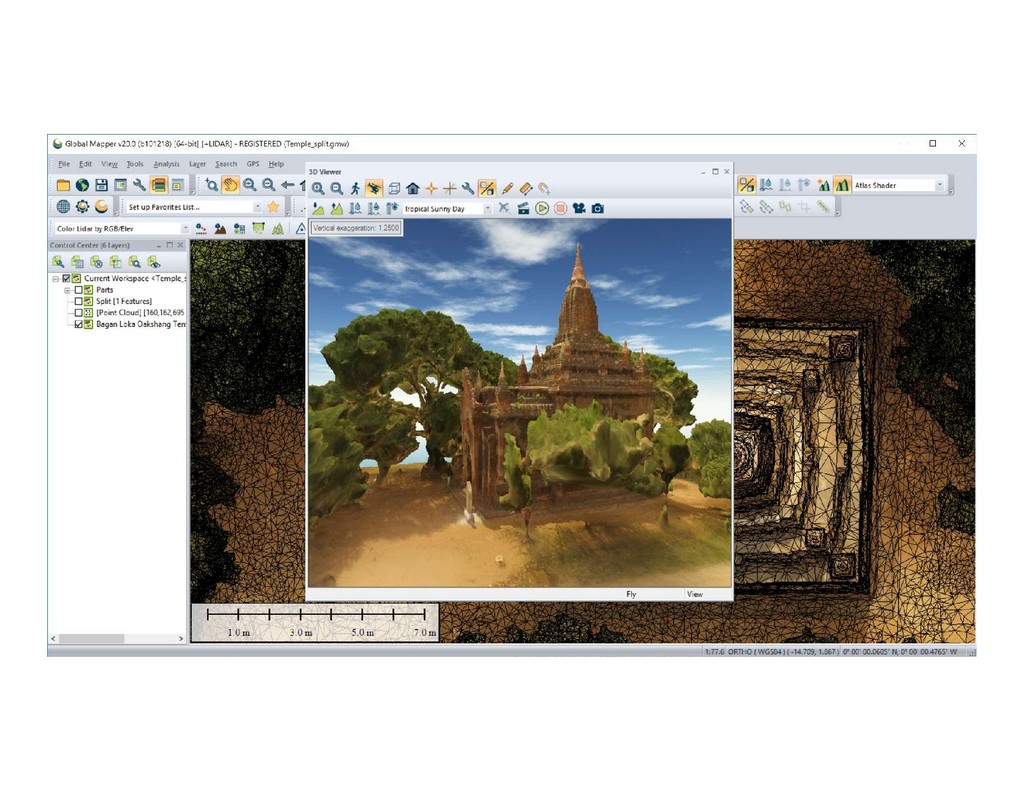
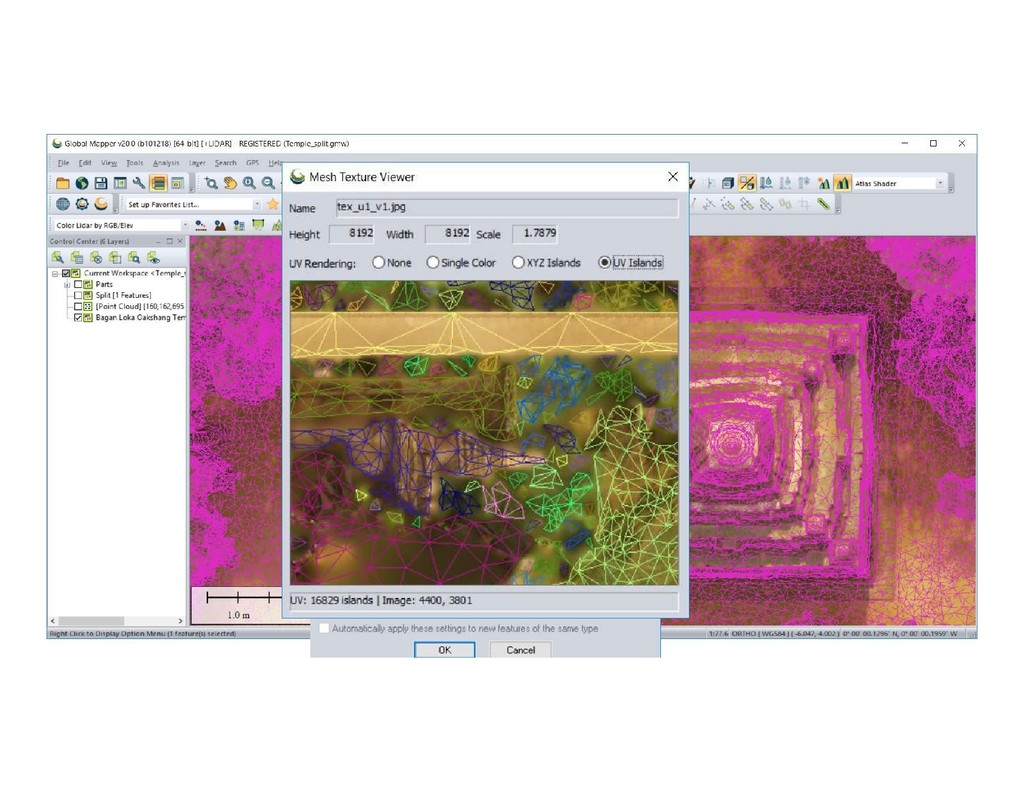
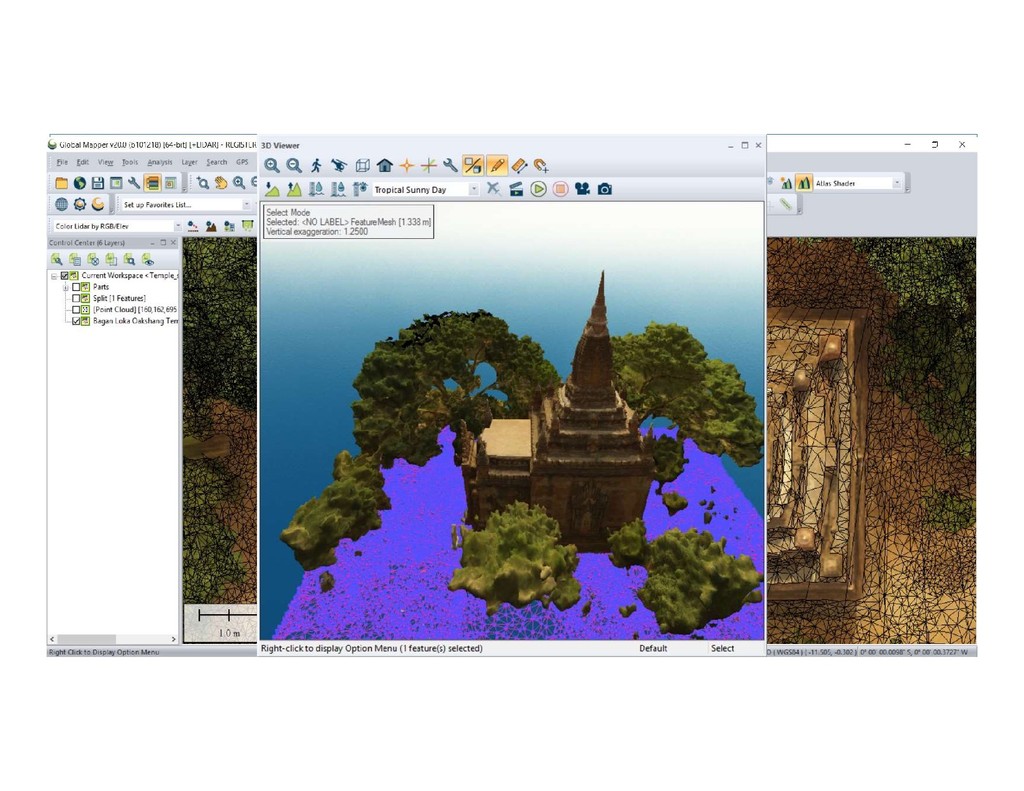
of overlapping images • Identify the same objects in multiple images from different perspectives • Generate precise orthorectified 3D image, create smoothed 3D mesh • Create optimized 3D point cloud from existing 3D mesh (less noise than original) • New point cloud thinning options – advanced decimation, ‘de-duping’ points
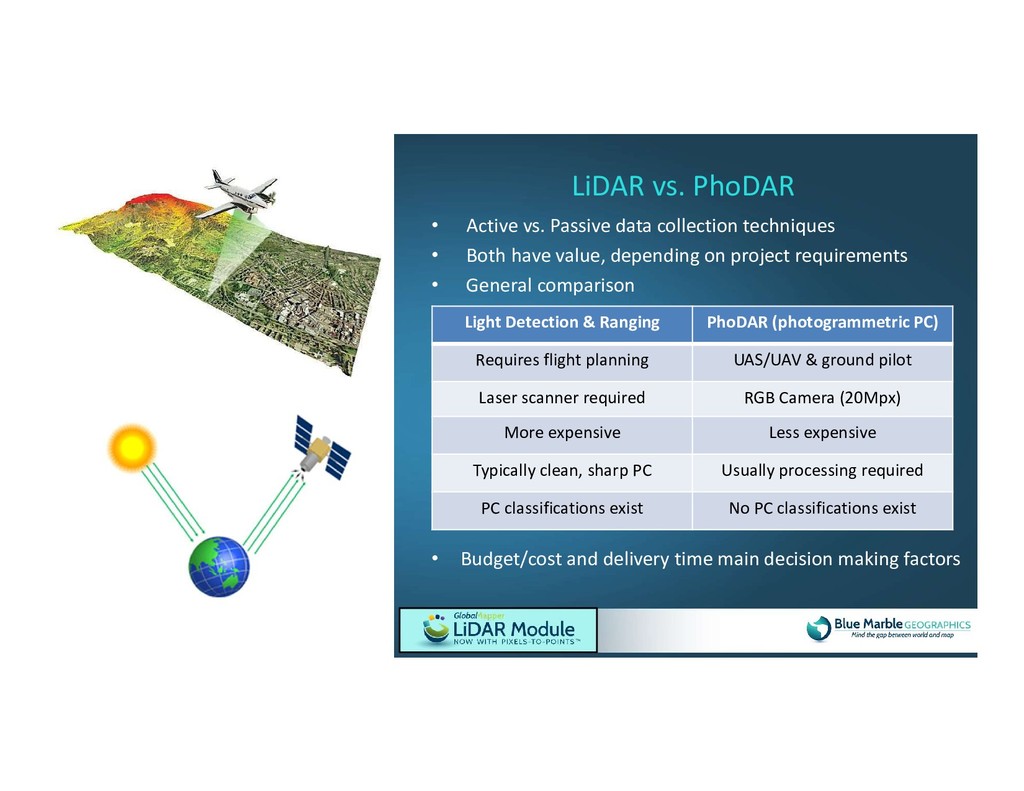
value, depending on project requirements • General comparison LiDAR vs. PhoDAR • Budget/cost and delivery time main decision making factors Light Detection & Ranging PhoDAR (photogrammetric PC) Requires flight planning UAS/UAV & ground pilot Laser scanner required RGB Camera (20Mpx) More expensive Less expensive Typically clean, sharp PC Usually processing required PC classifications exist No PC classifications exist
(Unmanned Aerial Vehicles) has rapidly expanded • Drones are now equipped with on-board GPS receivers, miniaturized cameras • 1-2 cm image resolution is relatively common • “Flying for Work” rules in U.S. are still evolving – FAA ‘commercially certified remote pilot’ – Visual line of sight – 400’ ceiling over target – Daytime only – 100 mph limit – Airport airspace restrictions UAS/UAVs and Drones
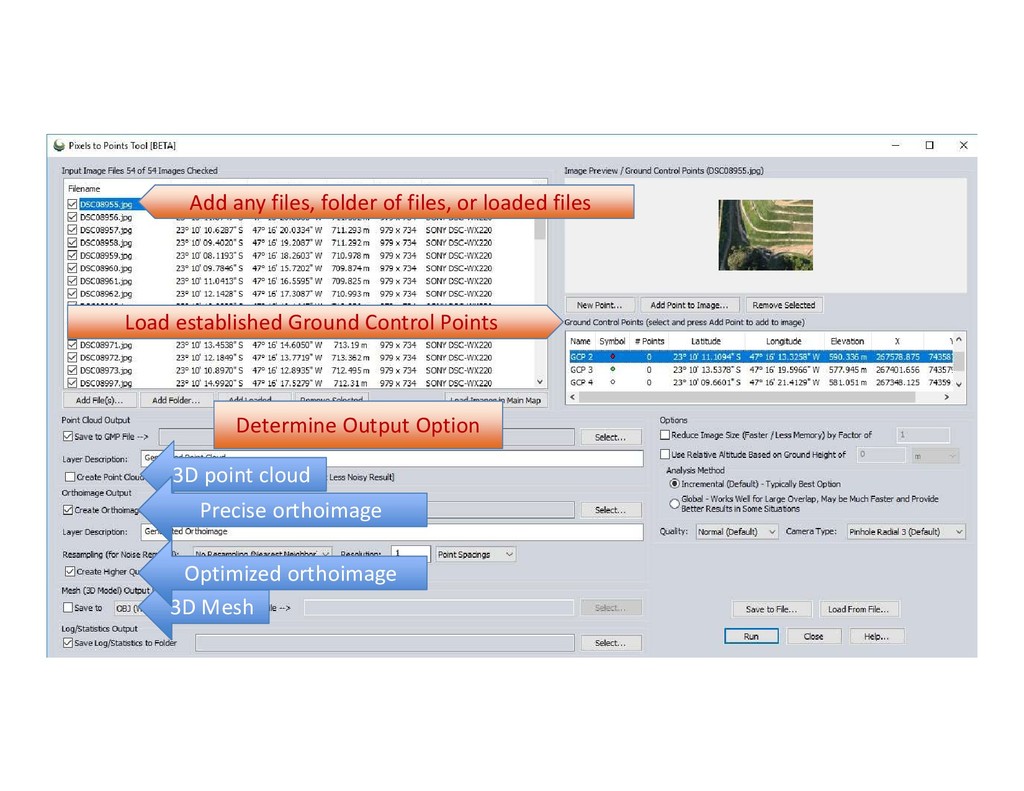
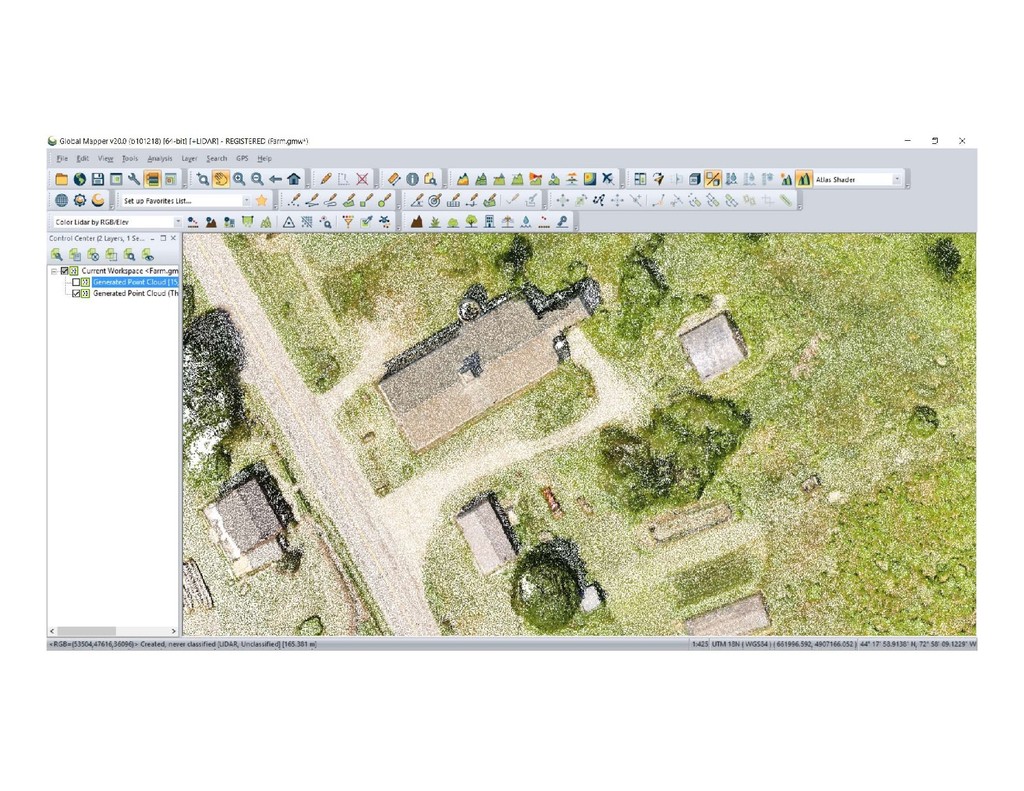
flight plan • Import adjacent images from a range of different perspectives • ID same objects, RGB values • Recommended stereoscopic overlap: 75% - 85% • Triangulate using geotagged reference points • Use network of ground control points to tighten accuracy Structure from Motion – Pixels to Points
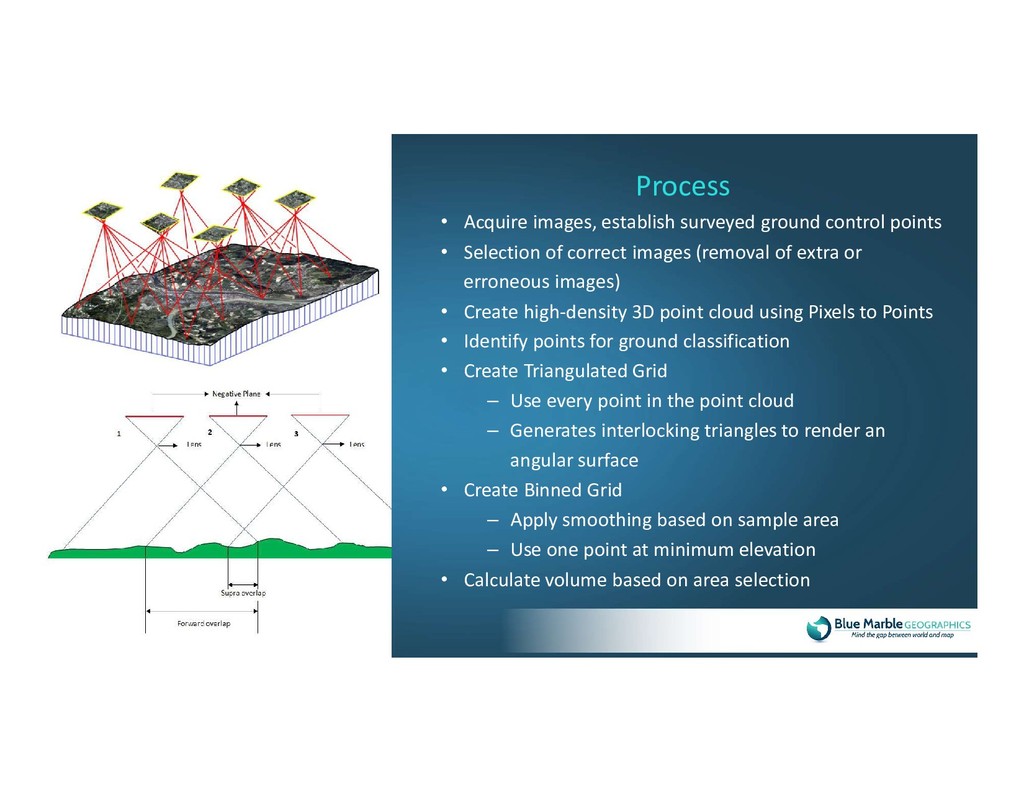
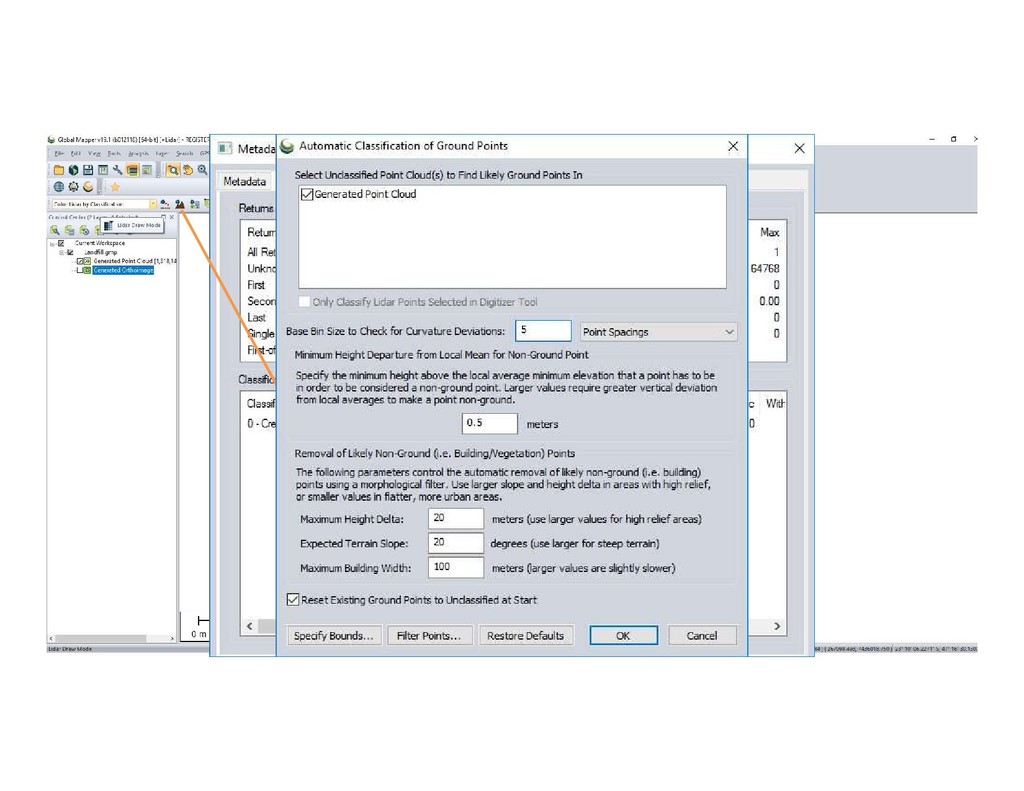
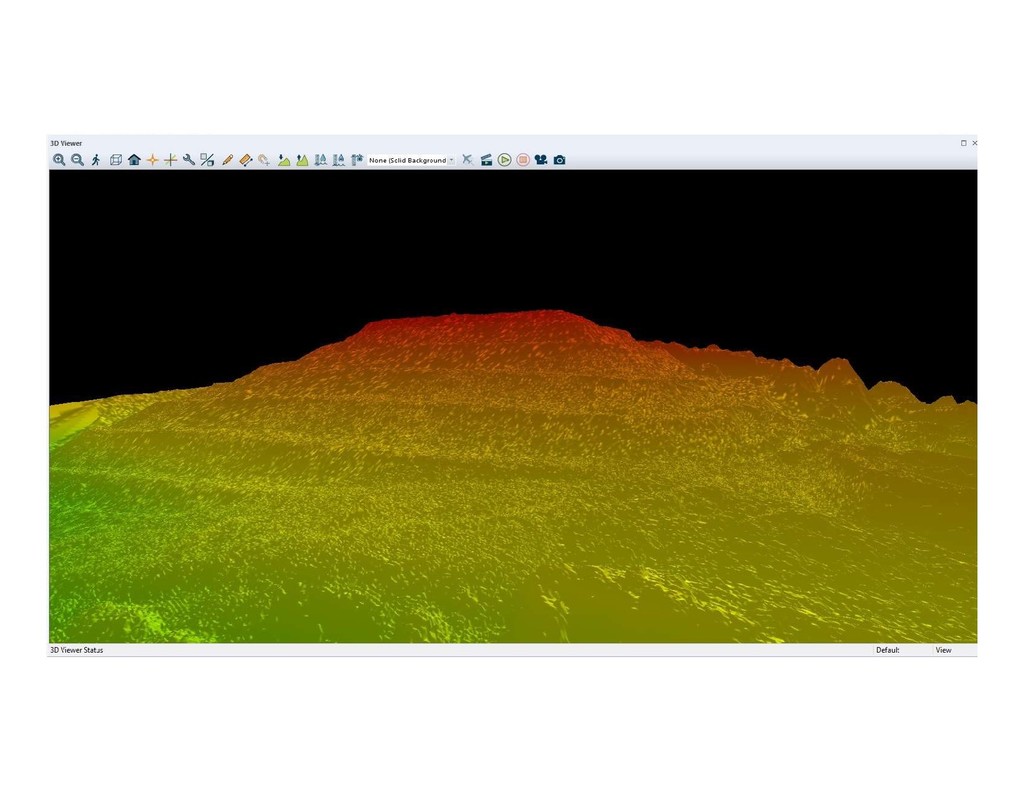
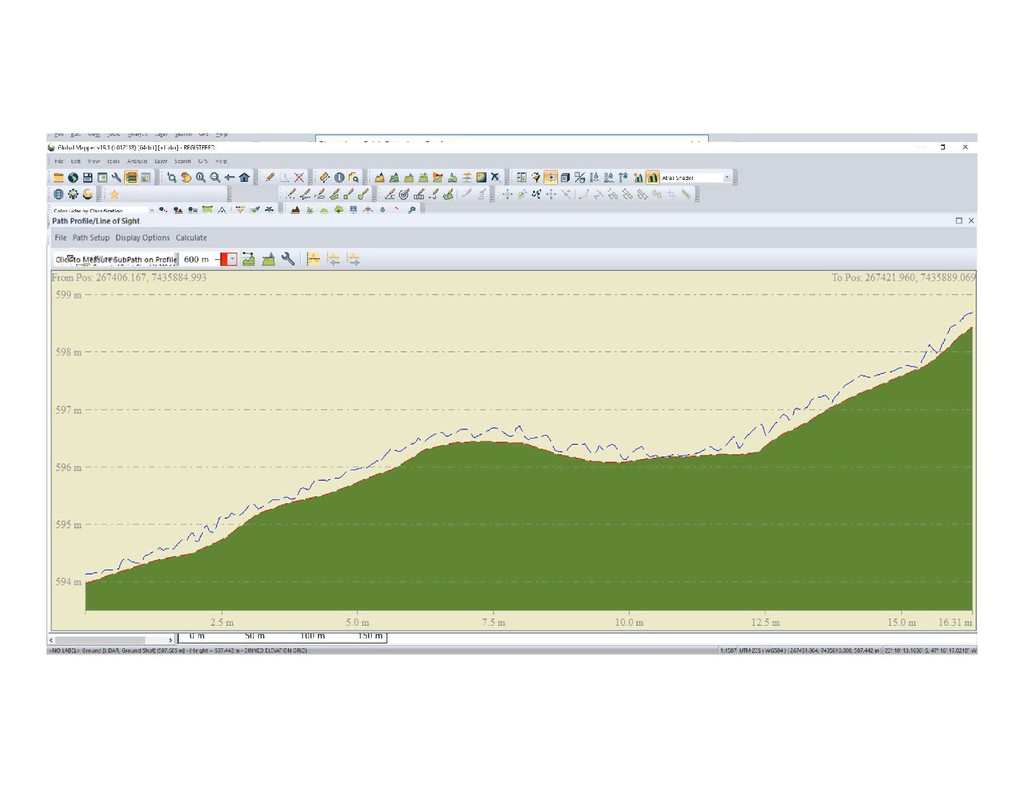
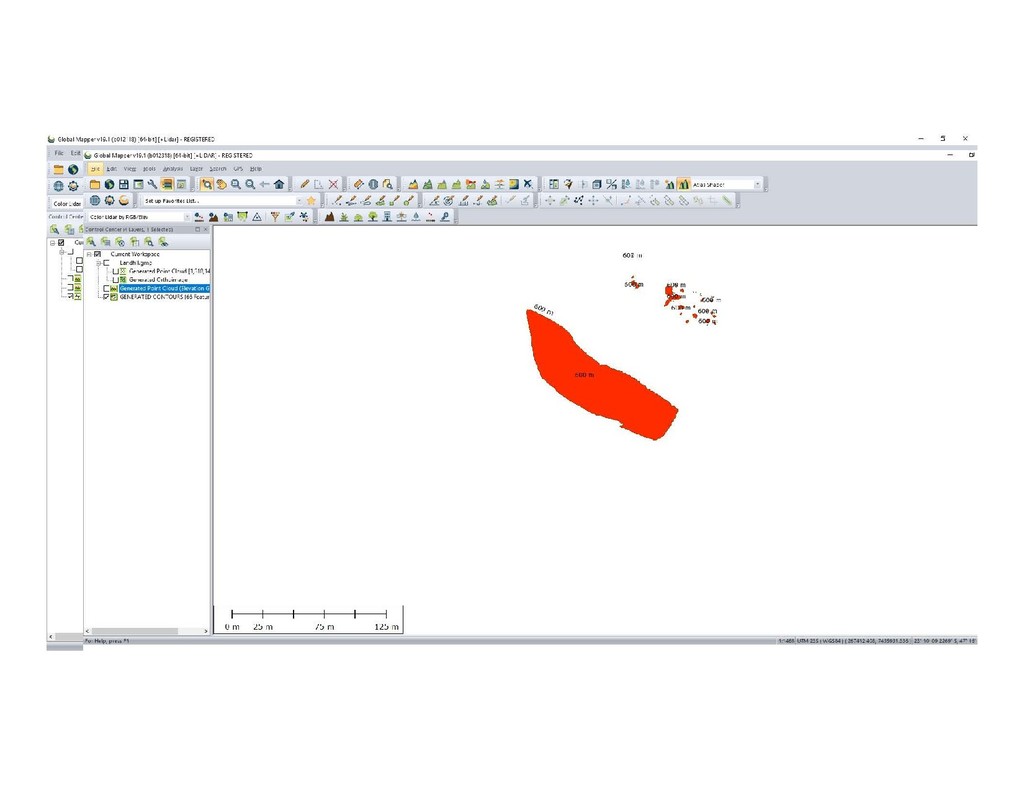
of correct images (removal of extra or erroneous images) • Create high-density 3D point cloud using Pixels to Points • Identify points for ground classification • Create Triangulated Grid – Use every point in the point cloud – Generates interlocking triangles to render an angular surface • Create Binned Grid – Apply smoothing based on sample area – Use one point at minimum elevation • Calculate volume based on area selection Process
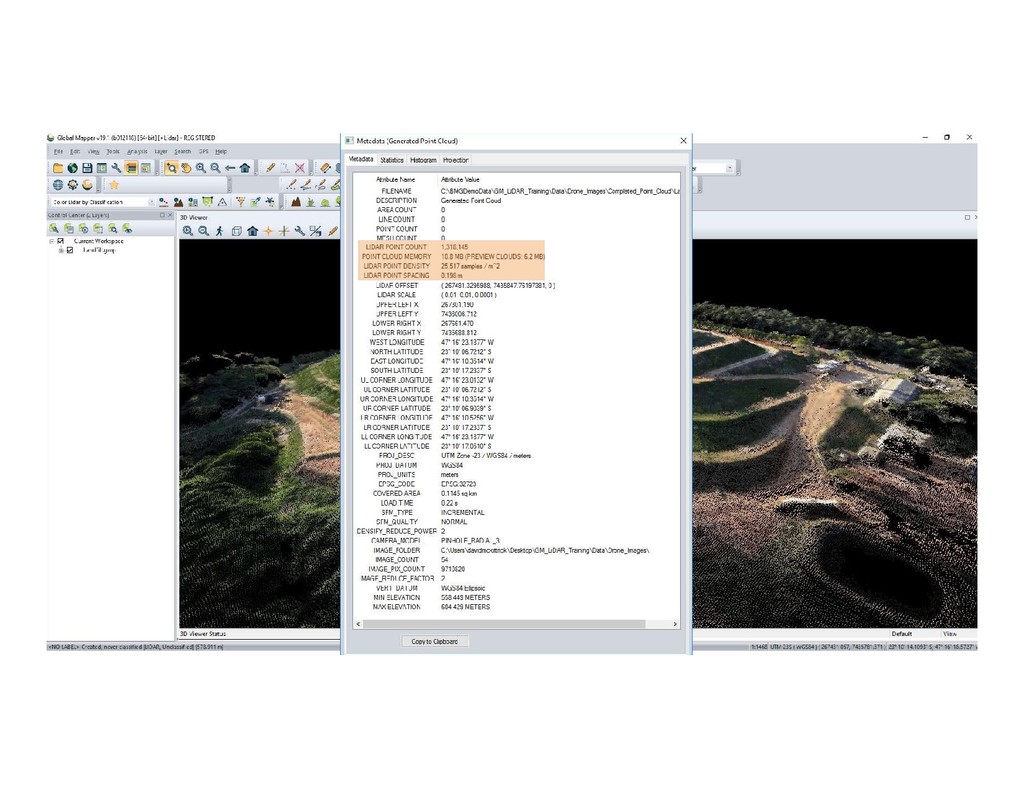
Generate point clouds w/EXIF geotags/georeferenced pixels • Use network of ground control points for tighter accuracy • Identify classified ground points • Grid DEMs from point cloud– Triangulate or Bin methods • 3D volumetric measurements, contour, area feature generation • 3D point cloud thinning for cleaner 3D mesh generation • Edit 3D meshes, split one mesh into many Summary – Pixels to Points workflow
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}